平穩隨機載荷的靈敏度分析識別方法
2022-12-15 01:15:08楊智春
振動與沖擊 2022年23期
關鍵詞:分析
夏 鵬, 楊 特, 王 樂, 楊智春
(1. 西北工業大學 航空學院, 西安 710072; 2. 上海機電工程研究所, 上海 201109)
動載荷識別方法通過結構響應信息對結構所受動載荷進行識別,最早于20世紀70年代中期在航空領域被提出,目的在于更準確地獲取飛機在飛行過程中的受載情況。經過幾十年的發展,國內外學者針對動載荷識別問題開展了大量的基礎理論研究和工程應用研究工作,使動載荷識別方法得以不斷的創新與完善,并在各個工程領域中得到應用。目前,動載荷識別方法主要分為頻域法和時域法,分別在頻域和時域中對動載荷進行識別。
動載荷頻域識別方法是發展較早、較為成熟的識別方法。Barlett等[1]最早利用頻域直接求逆法,識別出直升機槳轂中心在主要諧波頻率下的動載荷。之后Hansen等[2]提出頻響函數矩陣直接求逆法在共振區附近接近病態,導致識別載荷的誤差較大。針對這種現象,一些學者將數學反問題求解理論應用于動載荷識別方法。Karlsson等[3-4]國內外學者針對頻響函數矩陣病態問題進行了較為深入的研究,提出了一些改進的頻響函數矩陣求逆方法。Jia等[5-6]同時考慮FRF和響應誤差,利用5個加速度傳感器信號,分別將加權正則化方法和總體最小二乘方法應用于識別作用在平板結構的三個平穩隨機動載荷,其正則化參數由廣義交叉檢驗準則(generalized cross validation,GCV)確定。總的來說,動載荷頻域識別方法,原理簡單且識別精度良好,但得到的結果為頻域結果。由于載荷的識別過程需要在頻域中進行,需要足夠長度的測試樣本數據才能保證數據的穩定性,所以只適用于持續時間長的確定性動載荷及隨機動載荷樣本的識別,而對沖擊載荷這類瞬態載荷,其識別效果較差。
與頻域動載荷識別方法相比,時域法研究相對較晚,但時域識別結果直觀、便于應用,無需在頻域內進行傅里葉變換,不需要大量的統計數據,誤差也較小,在識別沖擊載荷之類的非平穩載荷上較之于頻域法優勢明顯,受到工程界的青睞。隨著系統辨識技術、控制理論的發展,結構動力學方程的多種求解方法也發展起來。Law等[7]提出了狀態空間形式的移動載荷識別方法,并利用動態規劃法解決識別結果擾動過大的問題。Jiang等[8-9]針對模態函數在結構約束邊界為零的現象,將空間分布載荷在Legendre多項式空間展開,并成功應用于Euler梁上空間分布動態載荷和作用于薄板上的空間分布載荷。陳帥等[10-11]基于模態空間轉換、離散數據最小二乘擬合與模態疊加原理,提出一種動載荷時域半解析識別方法,并準確識別出了作用于懸臂板結構上的平穩隨機動載荷。該方法中首次提出了將動載荷進行“分段識別”的概念,也證明了動載荷分段識別方法具有良好的應用潛力;之后,針對隨機載荷的識別,Li等[12]提出了一種基于譜分解和正則化的時域隨機動載荷識別方法,將隨機動態載荷識別轉化為載荷均值函數識別和協方差矩陣重構。方法基于格林核函數法建立前向辨識模型,進行譜分解,將動載荷協方差矩陣的辨識轉化為一系列特征向量的辨識,經仿真算例與試驗驗證,對于隨機載荷實現了很好的識別效果。該方法直接針對于隨機載荷的特征進行識別,是一種高效的隨機載荷頻域識別方法。而針對隨機動載荷的時域識別,Liu等[13]基于Gegenbauer多項式展開理論和正則化方法,在時域中將動載荷表示為時間和隨機參數的函數,通過離散化的負荷卷積積分和相應的系統單位脈沖響應函數,提出了一種識別隨機結構動力荷載的解析方法。該方法基于結構動力學原理對動載荷進行解析識別,對于隨機動載荷通常難以在時域內識別的問題提出了一種有效的解決方法;對于分布式隨機載荷,Liu等[14]提出了一種新的基于盲源分離和正交匹配追蹤的時空耦合分布動載荷識別方法。通過適當的正交分解,將時空耦合分布動荷載分解為一系列獨立的空間分布函數和時程函數,采用格林核函數法和正則化方法進行識別。之后引入盲源分離技術進行時程函數的辨識。經算例驗證,該方法能處理復雜結構上的時空耦合分布動荷載,并能分別實現其空間分布表示和時程重構。此方法的提出有效的應對了分布式動載荷難以表征、難以在時域內識別其時間歷程的難題,對于分布式動載荷的識別問題具有重要的意義。
靈敏度分析是研究與分析一個系統(或模型)的狀態或輸出變化對系統參數或周圍條件變化的敏感程度的方法。毛玉明等將靈敏度分析技術引入動載荷識別領域,提出了基于靈敏度分析的動載荷時域識別方法,對作用于四自由度離散振動系統的正弦函數周期載荷進行了準確識別,且研究發現,利用靈敏度分析識別動載荷的方法對響應測量噪聲不敏感[15]。
本文針對平穩隨機動載荷的時域識別問題,提出一種基于靈敏度分析的平穩隨機動載荷分段時域識別方法。將平穩隨機動載荷樣本分為若干小段,將該時間段內結構的輸入動態載荷表示為正弦級數疊加的形式,針對靈敏度分析對初值敏感問題,提出選取頻率參數的方法,提高了初值賦予的合理性,在一定程度上降低甚至避免了由于靈敏度分析初值敏感而導致識別結果不收斂或識別過程中迭代次數多、計算效率低的問題;并通過靈敏度迭代分析來確定相應正弦級數的幅值,從而確定該時間段內結構所受的平穩隨機動載荷樣本。最后將各個時間段平穩隨機動載荷樣本進行整合,得到平穩隨機動載荷整體樣本的識別結果。
1 動載荷靈敏度識別模型
對于線性多自由度系統,其運動方程可表示為

(1)

假設穩態隨機動載荷{F}在第j個自由度上的激勵Fj可以用若干個正弦函數的疊加的形式表示,即
(2)
(3)
(4)
(5)
(6)
根據靈敏度定義可得
{δz}=[S]{δP}
(7)
式中:{δz}為加速度響應誤差;{δP}是動態載荷參數向量的修正變化量;[S]是結構動響應對動態載荷參數的靈敏度矩陣。將式(7)展開可得
(8)
式中,l為分析時間段內采樣時間點個數。同理,當已知結構某自由度上的位移響應或者速度響應,式(7)變為如下形式
(9)
(10)
式(7)可通過求靈敏度矩陣的廣義逆,得到外激勵參數向量的修正變化量{δP},即
{δP}=[SHS]-1SH{δZ}
(11)
已知第j步中的載荷參數向量為{Pj},其對應的修正變化量為{δP},那么修正后的載荷參數向量{Pj+1}為
(12)
如果當前迭代步中的變化量小于一定的閾值,可以認為靈敏度迭代分析得到收斂。這里,將動載荷識別靈敏度迭代分析模型的收斂條件設置為
(13)
式中,μ為設定的閾值。
2 正則化方法
一般情況下,式(11)的求解中都會遇到不適定問題,即靈敏度矩陣為病態矩陣,從而導致解{δP}對于{δz}中的誤差很敏感。因此可以采用Tikhonov正則化的思想[16],將式(7)不適定問題轉化為以下的阻尼最小二乘問題:
(14)
式中,λ是正則化參數。
通過調整正則化參數λ,可得出正則化解{δP},則上述的優化問題式(14)可轉化為如下形式
(15)
通過化簡式(15)可得:
{δP}=(SHS+λ2I)-1SH{δz}
(16)
合理地選取正則化參數是正則化有效求解的關鍵。當選取的正則化參數較大,正則化解變偏離了原問題;當正則化參數較小時,正則化解仍是不穩定的。本文正則化參數λ通過GCV方法來選取。
3 平穩隨機載荷樣本的分段識別方法
對于工程結構所受到的一段平穩隨機動載荷,我們很難用一系列的參數來表示它的時間進程。為了能將平穩隨機動載荷樣本進行參數化表示,可以將隨機信號分割為若干小段,這樣就能夠用正弦函數疊加的形式來表示這一小段時間內的平穩隨機動載荷樣本,通過靈敏度迭代分析方法來確定相應正弦函數的參數,從而確定該時間段內結構所受的平穩隨機動載荷。
對一小段平穩隨機動載荷樣本運用靈敏度分析模型進行識別時,很難得到收斂結果。這是因為當一小段載荷信號不存在周期性時,用多個正弦函數疊加方式去描述其時間歷程,有無窮多的頻率幅值組合能滿足要求,即存在無窮多解,導致在靈敏度迭代分析時不能得到收斂結果。實際上,如果需要描述一小段隨機樣本,只需要一組正弦函數組合來表示即可。因此,在對一小段隨機樣本進行靈敏度分析時,只需要對特定頻率下的幅值參數進行靈敏度分析,迭代求得特定頻率下的正弦函數幅值。在選取頻率點時,主要關注響應頻率譜以及結構的固有頻率,即:若響應頻帶范圍內沒有結構的固有頻率,則在響應頻率譜各個峰值的位置選取頻率點作為主要頻率點,若包含了固有頻率,則在固有頻率峰值半功率帶寬內選取3~5個點作為主要頻率點。最后在響應頻帶范圍內均勻地布置若干個頻率點,配合之前確定的主要頻率點組成進行幅值靈敏度迭代分析所需的頻率。
由于實際測到的結構振動響應是連續的,若要對每一時間段進行靈敏度分析,就需要消除待識別時間段之前動載荷對當前時間段響應的影響,從而保證每段的識別精度。本文采用的解決辦法,在計算結構響應時,將已完成識別時間段的載荷與待識別時間段的由待識別載荷參數向量P決定的迭代載荷一起作為結構的載荷輸入,利用公式(1)中的振動方程計算得到結構在完成識別時間段的載荷與待識別時間段載荷共同激勵下產生的全時段響應。同時,在靈敏度分析時只需關注待識別時間段的響應誤差,而待識別段響應誤差是由該段時間計算響應與真實響應做差得到,由此可以消除該時間段之前的載荷對該時間段響應的影響。在選定頻率點后,只對幅值參數進行靈敏度分析迭代能夠快速收斂,因此幅值參數的初值不需要進行特殊設置。
平穩隨機動載荷樣本靈敏度分析方法的識別流程如下:
(1) 獲取平穩隨機信號激勵下結構的振動響應;
(2) 對振動響應進行頻譜分析,選定靈敏度迭代分析所需的頻率點;
(3) 設定靈敏度分析中的初值,隨機響應信號的分段數以及靈敏度分析迭代的收斂條件;
(4) 假設響應信號每段分析時長為Δt,對于第k段時間段[(k-1)Δt+1,kΔt],由載荷參數得到該段假設載荷,將前k-1段[0,(k-1)Δt]的識別結果與第k段的假設載荷組合,求得總時長為的振動響應;
(5) 由結構真實響應與計算得到的仿真響應求得第k段的誤差矩陣,根據靈敏度分析模型,迭代求得第k段假設載荷。檢查是否滿足收斂條件,若滿足則得到該段的識別結果,若不滿足則返回第4步;
(6) 將所有時間段的識別結果進行組合,得到該隨機信號樣本的識別結果。
4 試驗驗證
為了驗證本章所提出的平穩隨機動載荷識別方法的可行性和有效性,如圖1所示。 采用一個框架模型來進行所提出方法的驗證試驗,根據測試的振動響應來進行平穩隨機動載荷樣本的識別。根據框架模型的特點,可以認為框架每層的質量都集中在每層的方框上,每兩層方框之間由4個支柱進行連接,每個支柱是由截面為0.139 m×0.027 m × 0.001 m的扁鋼條層疊而成。試驗中采用1個垂直作用于框架結構的電磁激振器來施加各態歷經的平穩隨機動載荷。同時,在各層框架上分別布置加速度傳感器。加速度傳感器采用的PCB公司333B30型加速度傳感器,靈敏度為100 mV/g,電磁激振器采用的是MB公司的Modal-50型電磁激振器,功率放大器采用的是MB公司的SL500 VCF型功率放大器,力傳感器采用PCB公司208C02型力傳感器,用于采集加速度與力信號的儀器為DEWESoft公司SIRID-8×STGM-8×AO型多功能采集儀,采樣頻率為500 Hz。試驗布置如圖2所示。
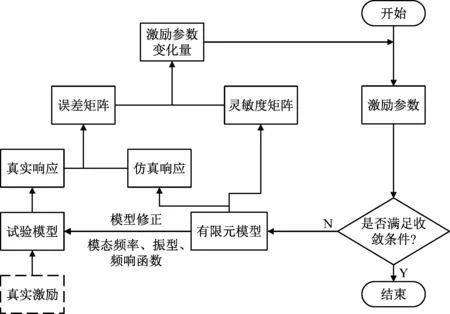
圖1 動載荷識別流程
在靈敏度迭代分析過程中,需要盡量保證計算響應的仿真模型與實際模型盡可能一致[17],因此對本文的試驗模型進行動力學模型修正,經過修正后的計算模型與試驗模型固有頻率比較結果如表1所示。試驗通過安置在激振器頂桿與框架第一層之間的力傳感器以及各層的加速度傳感器來獲取力信號和加速度信號,各信號經過A/D轉換后輸入計算機,在識別過程中選用第2層以及第7層的加速度響應來進行載荷識別,結構所受的隨機激勵以及2個測點的加速度響應的時域信號如圖3~4所示。對于隨機動載荷進行片段分割時,分割的片段時間長度應當不小于結構動響應最低峰值頻率對應周期的長度。而在完成各段動載荷識別后,段與段之間存在不連續情況時,將端點值取平均值后進行連接。
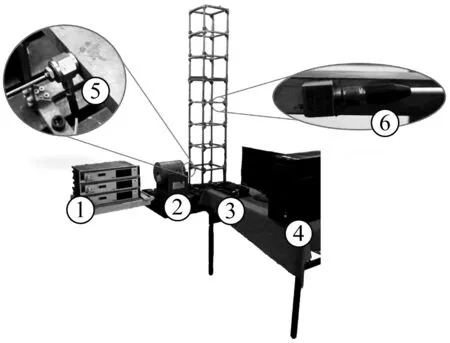
1-功率放大器; 2-電磁激振器; 3-數據采集儀; 4-計算機; 5-力傳感器; 6-加速度傳感器

表1 模型修正結果對比
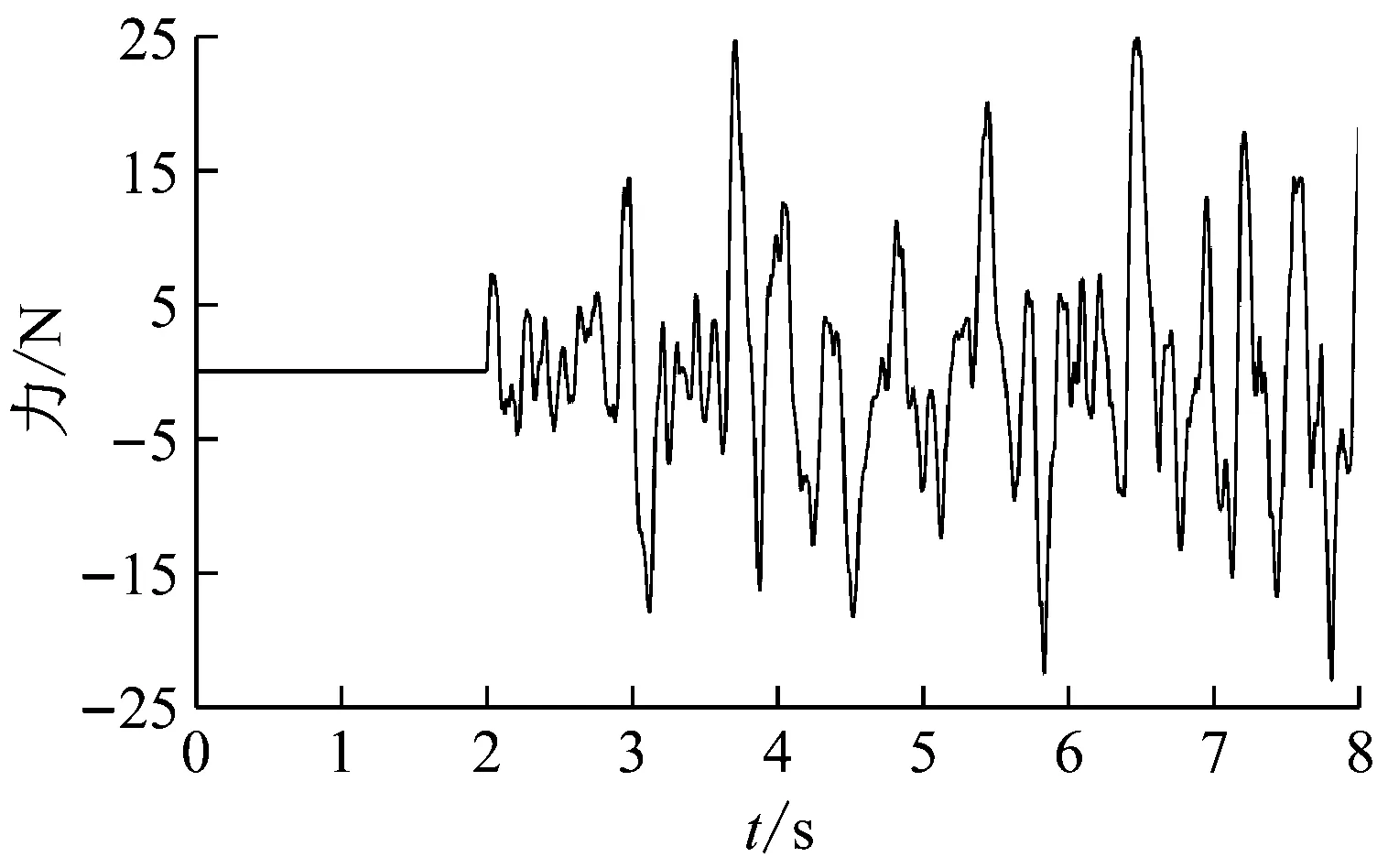
圖3 平穩隨機載荷樣本

(a) 第2層測點加速度響應
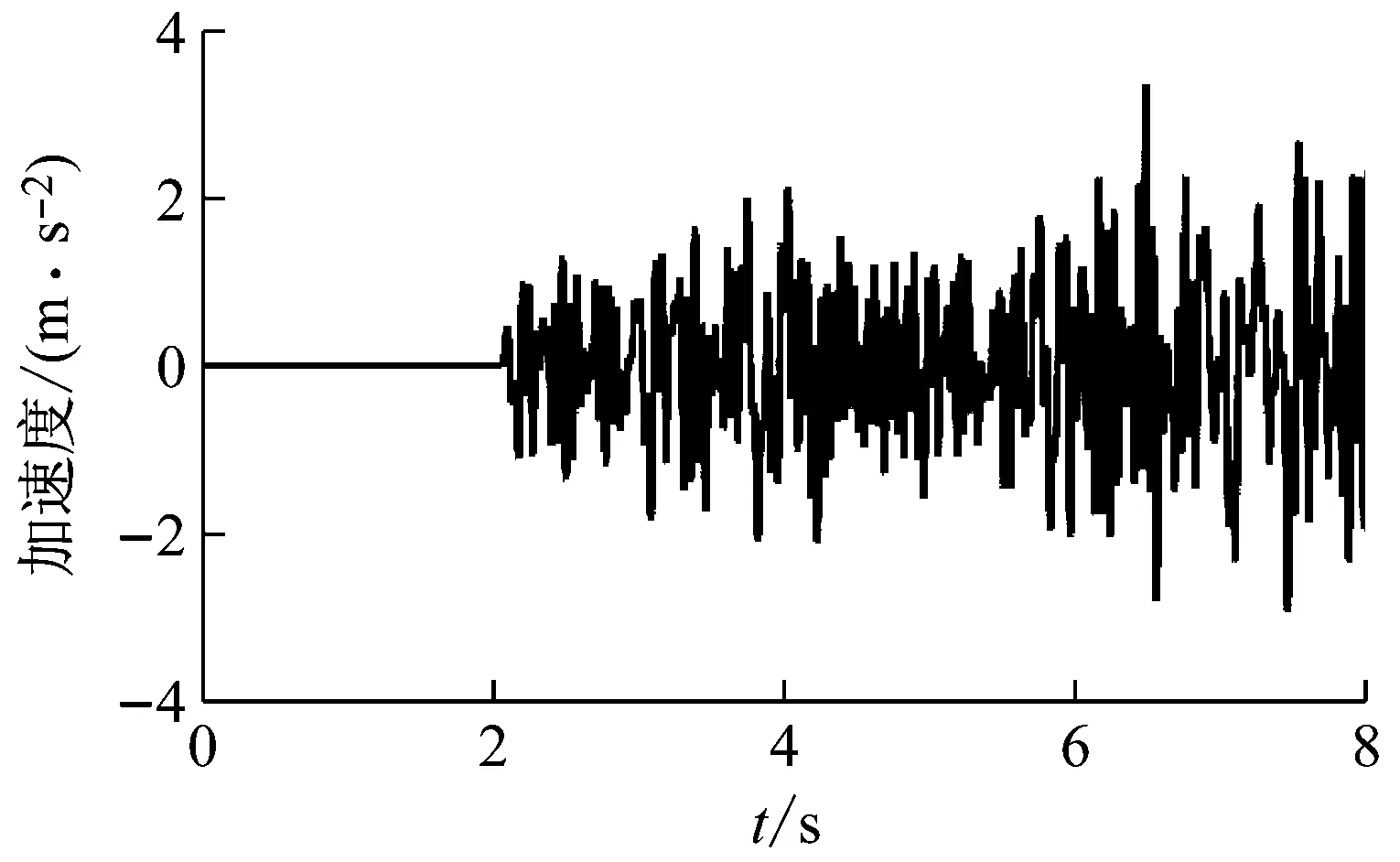
(b) 第7層測點加速度響應
對2個測點的加速度響應信號進行譜分析,來確定幅值靈敏度分析時需要的各個頻率點,2個測點的自功率譜密度函數如圖5所示,各個峰值坐標位置均在圖中用黑點標注。可以看出,響應的頻帶范圍為0~25 Hz,且在2.441 Hz、5.371 Hz、6.836 Hz、7.813 Hz、11.23 Hz、17.58 Hz、18.55 Hz、21.97 Hz以及23.93 Hz處存在峰值。平穩隨機載荷,其本身類似白噪聲。加上因為是線性系統,其激勵起響應的頻率應是相似的。因此結構響應和測量噪聲混雜的時候,為準確有效挑出真實信號的頻率點,本文挑選頻率點的處理方法如下:根據前文模態試驗結果,本文選取1.44 Hz,2.44 Hz,2.94 Hz,3.44 Hz,4.87 Hz,5.37 Hz,5.87 Hz,6.83 Hz,7.81 Hz,8.81 Hz,9.81 Hz,11.23 Hz,12.23 Hz,13.67 Hz,14.67 Hz,15.63 Hz,17.58 Hz,18.55 Hz,20.97 Hz,21.97 Hz,22.97 Hz以及23.93 Hz,作為靈敏度分析時的頻率點。
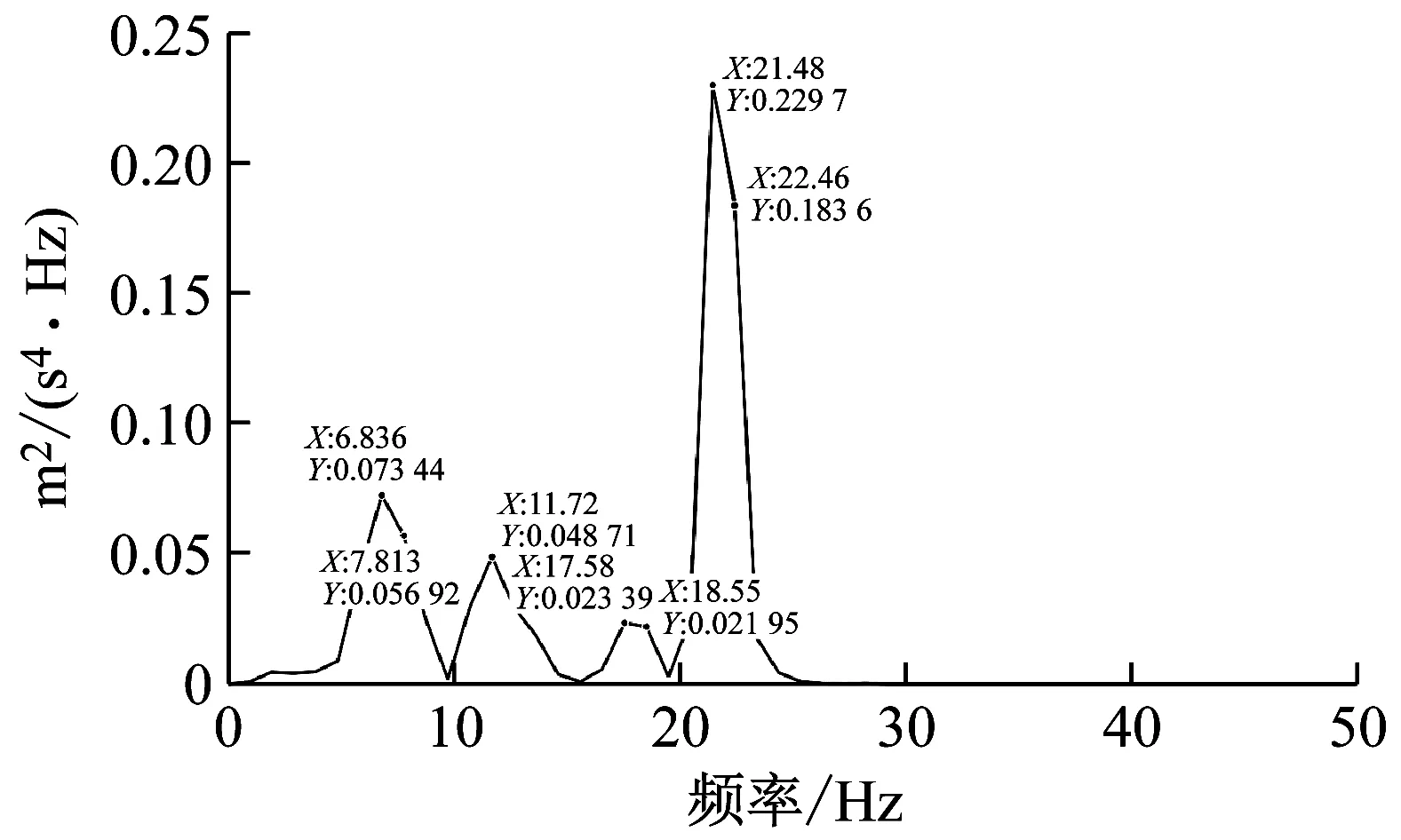
(a) 第2層測點加速度響應自功率譜密度
設各頻率點幅值參數為1,將總時長分為45段,迭代收斂的條件μ=0.001。根據本章所提出的基于靈敏度分析的動載荷分段識別方法得到識別結果,平穩隨機載荷時域樣本識別結果以及相應的識別載荷功率譜密度如圖6所示。
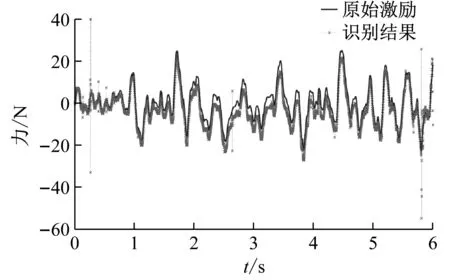
(a) 平穩隨機載荷樣本的時域識別結果
為了進一步定量分析本文提出的識別方法的有效性和準確性,定義兩個指標作為評判隨機信號識別結果好壞的標準,一個是識別載荷與真實載荷之間的均方根誤差(mean square error,MSE),MSE越小說明識別結果與真實值之間誤差越小,兩者越接近,另一個是識別載荷與真實載荷之間的相關系數R,R越接近于1說明識別結果與真實值的形狀和變化規律越相似。
(17)
(18)
對于本試驗算例,識別結果與真實載荷之間的MSE為4.03,R值為0.958 4,說明識別載荷能夠較為準確地反映真實載荷的變化規律。從識別結果圖中可以看出,在某些位置存在著識別結果不夠光滑以及峰值識別誤差較大的現象,這也是造成識別結果與真實載荷之間RMSE較大的原因。總體來看,本文提出的方法能夠很好地識別出作用在8層框架結構上的各態歷經的平穩隨機動載荷樣本。
5 結 論
本文針對時域隨機動載荷,提出了一種基于靈敏度迭代分析的時域分段識別方法,將載荷時間歷程進行分段并將每一小段內的載荷表示成正弦函數疊加的形式,通過靈敏度分析方法確定相關載荷參數得到其時間歷程,整合各段結果從而得到平穩隨機動載荷樣本總體時間歷程。在靈敏度分析中,針對迭代分析過程中的病態問題,采用了正則化處理方法。指出了在識別的每一小段載荷樣本時,只需通過選定的頻率點,對幅值進行靈敏度分析迭代來識別該時段內的平穩隨機動載荷樣本,并給出了頻率點選取原則。討論了相鄰時間段之間的相互影響及處理方法。試驗結果表明該方法能夠很好地識別出作用在8層框架結構上的各態歷經的平穩隨機動載荷樣本,是一種具有應用前景的時域動態載荷識別技術。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06