噴霧機內藥液晃動橫向力測量系統的設計
2022-12-16 01:07:20楊亞飛張肖柯楊金歌鄧武清
農機使用與維修 2022年12期
關鍵詞:測量
楊亞飛,張肖柯,楊金歌,鄧武清,金 濯
(江蘇農牧科技職業學院,江蘇 泰州 225300)
0 引言
機械施藥作為現階段植保作業的主要手段。噴桿式噴霧機具有作業效率高、防治效果好的特點,已成最重要的大田施藥裝備。2013年開始,我國農機補貼目錄中加大了噴桿式噴霧機補貼力度[1-2]。
對于噴桿式噴霧機而言,為了保證作業時的通過性,噴霧機行走底盤離地間隙較高,附加的橫向力會增加噴霧機側翻危險的發生概率。由于田間地塊的不規則性,噴桿式噴霧機在作業時,藥箱內液體會產生晃動,而藥箱內液體和噴霧機機體屬于液固耦合連接,晃動產生的附加載荷會影響噴霧機整機性能。因此,研究噴霧機藥箱內液體晃動載荷對噴霧機底盤技術、整機安全性能及噴霧作業性能的提升有著重要意義[3-5]。
為了得到噴桿式噴霧機藥箱藥液晃動橫向力規率,同時研究附加的橫向力對噴霧機作業性能的影響,為噴霧機的設計提供依據,本文設計了一種測量藥箱藥液晃動橫向力的測量系統。
1 噴霧機藥箱藥液晃動的力學分析
由于藥箱藥液晃動問題具有復雜性,為了準確測量出藥箱藥液晃動橫向力,構建一種正確的測量系統,對噴霧機藥箱進行受力分析如圖1所示。

圖1 藥箱藥液晃動力學模型
噴桿式噴霧機在作業時,會受到路面的激勵q1、q2,使藥箱中液體晃動,會對藥箱產生附加作用力。藥箱橫向晃動會使液體產生沿y方向的動壓力Fy,使藥箱受到附加的橫向力;同樣,藥箱橫向晃動會導致液體質心偏移,使藥箱產生附加力矩Mx。藥箱縱向晃動,藥箱橫向晃動會使液體產生沿x方向的動壓力,使藥箱受到附加的橫向力Fx,同樣會使藥體質點偏移導致液箱產生附加的力矩My。在z軸方向,藥箱受液體的重力mg。
同樣,藥箱受到晃動液體對其施加的其他方向的力。包光偉[6]指出藥箱平動只能激發儲液箱內液體二維晃動,即橫向晃動和縱向晃動。噴霧機田間作業時,對藥箱激勵使液體主要產生橫向和縱向晃動。因此,認為藥箱因液體晃動而受到其他方向的力比較小,因而不做考慮。
2 藥箱藥液晃動橫向力測量系統設計
2.1 橫向力測量系統主體
由于噴霧機藥箱與行走底盤機架相連,藥箱受到的附加力會傳遞到噴霧機行走底盤。通過上述分析,噴霧機行走底盤受到藥箱作用力。噴霧機安全性是第一位考慮因素,藥箱藥液晃動橫向力會增加噴霧機發生側翻機會,同時橫向力會影響噴霧機行駛直線穩定性,造成噴霧不均。因此,本測試系統研究目的在于測量作用于噴霧機行走底盤上附加的藥箱藥液晃動橫向力Fy。
本系統主要由橫向力測量傳感器、動態應變儀、數據采集儀、計算機、信號分析軟件及12 V直流電池組成,系統框圖如圖2所示。橫向力傳感器通過應變片產生的應變大小的變化使測量電路產生相應的電壓信號,通過測量電壓信號測量相對應的橫向力Fy。
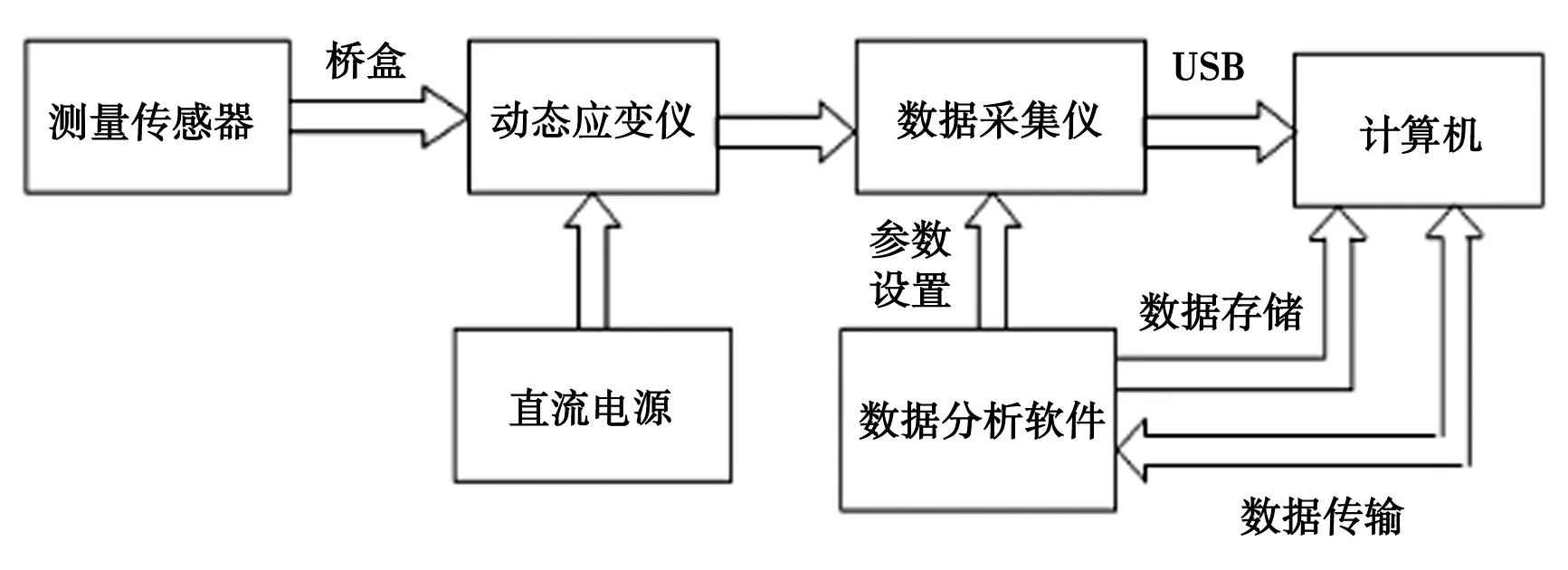
圖2 藥箱藥液晃動橫向力測量系統
橫向力測量傳感器應變片測量電路和動態應變儀橋盒連接,將藥箱藥液晃動橫向力作用產生的應變轉化為電壓信號傳遞給動態應變儀。動態應變儀將應變片測量電路中的輸出電壓經過放大和低通濾波傳遞給數據采集儀。數據采集儀通過USB接口與計算機相連,數據采集儀的采樣頻率、存儲路徑等功能通過信號分析軟件來設置,信號分析軟件將數據采集儀采集的電信號進行分析后存儲于計算機中。噴霧機自帶12 V直流電源給動態應變儀供電。測量系統各部分實物圖如圖3所示。

圖3 橫向力測量系統各部分實物圖
2.2 藥箱藥液晃動橫向力測量力敏元件的設計
根據噴霧機藥箱藥液晃動力學模型,噴霧機除了受藥液晃動橫向力外還受到其他方向的力。為了保證力敏元件既在主測量方向有足夠的靈敏度,還保證其他方向力的加載對力敏元件應變片測量電路輸出信號的干擾要足夠小,這就要求力敏元件要有合理的結構設計和布片方式,力敏元件的結構和應變片布片方式如圖4所示。

圖4 應變片布片方式示意圖
為了使橫向力測量力敏元件對橫向力Fy反應的靈敏度大于對縱向力Fx的靈敏度,所設計力敏元件尺寸d=11δ(δ為應變片所安裝板材壁厚)。應變片R1和R2布置在主變形體的豎直對稱線上,兩應變片上下對稱,距離λ為100 mm。應變片R1、R2與大小為120 Ω的標準電阻R連接成應變片測量橋路。
當R1=R2=R時,應變片測量電路輸出電壓為
(1)
當ΔRi≤R時
(2)
式中U0—供電電壓,mV;
ΔRi—各電阻變化值,i=1、2;
ki—電阻應變片靈敏系數,i=1、2;
εi—應變片的應變,i=1、2。
當力敏元件受到橫向力Fy時,由于橫向力Fy在R1和R2處的力臂不同,會使R1、R2產生不同大小的應變,從而使應變片測量橋路輸出相應的電壓。當力敏元件受到力矩Mx時,由于力矩的傳遞特性,力矩Mx使R1、R2產生相同的應變,根據公式(2),應變片測量橋路輸出電壓為0。同理,當力敏元件受到力矩My時,應變片測量橋路輸出電壓也為0。當力敏元件受到豎直方向重力mg時,認為橋路上應變片同時受壓,每個應變片產生的電阻變化相同,則測量橋路輸出電壓依然為0。
研究過程選擇浙江黃巖測試儀器廠生產的BX120-3AA箔式應變片,應變片主要技術參數如表1所示。
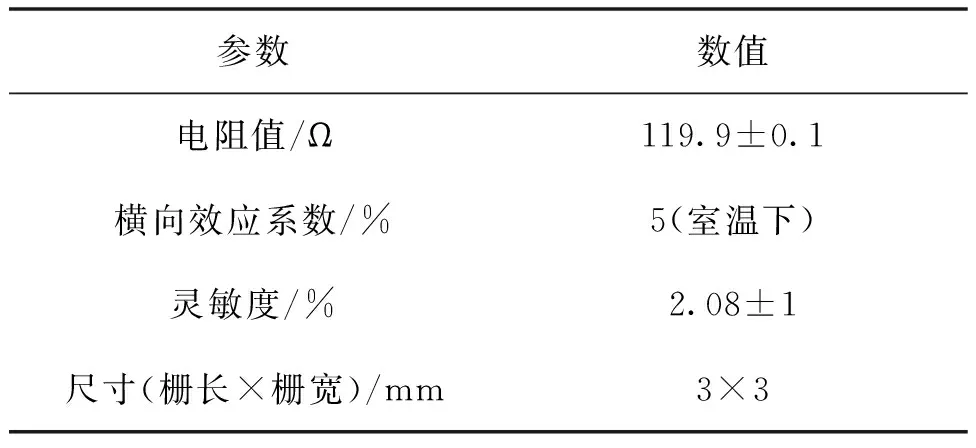
表1 應變片主要技術參數
2.3 力敏元件的試驗標定
為了得到所設計的傳感器輸出電壓和測量方向橫向力之間的關系,以及傳感器的線性度、穩定性和重復線靜態性能,對傳感器進行標定試驗,標定現場如圖5所示。

圖5 傳感器標定實驗
將傳感器測量橋路與動態應變儀橋盒相連,連接示意圖如圖6所示,橋盒連接于動態應變儀輸入通道,將動態應變儀相應的輸出通道通過BNC數據線與數據采集輸入通道相連,數據采集儀通過USB接口連接計算機。動態應變儀接通電源,預熱30 min,打開數據處理軟件,識別采集儀數據采集通道,設置數據存儲路徑和數據采集儀采樣頻率。動態應變儀選擇合適采樣頻率范圍,靈敏度放大倍數和校準值,調平測量橋路。選擇的采樣頻率為300 Hz,采樣頻率范圍為0~100 Hz,動態應變儀靈敏度放大倍數為10,校準值為900uε。
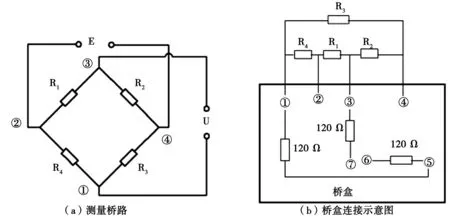
圖6 測量橋路與橋盒連接示意圖
將傳感器安裝在專用標定架進行標定,標定力臂距長度為0.2 m,沿橫向y方向正反方向分別進行加載和卸載進行標定,標定試驗重復2次,記錄輸出電壓絕對值見表2。

表2 傳感器標定數據 單位:mV
采用最小二乘法對傳感器y方向和-y方向標定的實測數據進行擬合,繪制的標定曲線見圖7。擬合得到輸出電壓的絕對值y(mV)與橫向力x(N)的線性關系

圖7 藥箱藥液晃動橫向力測量傳感器標定曲線
y=0.743x+0.387
(3)
相關系數R2=0.995。根據標定數據和擬合方程,該傳感器的線性度為0.915%F·S,重復性誤差為1.597%F·S,遲滯為0.83%F·S。
3 結論
分析了藥箱內藥液晃動橫向力測量要求,根據藥液晃動橫向力測量要求,構建了橫向力測量系統,設計了橫向力測量傳感器。并對其進行標定,該橫向力測量傳感器線性度為0.915%F·S,重復性誤差為1.597%F·S,遲滯為0.83%F·S。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00