基于ROS 的履帶式機器人室內定位及地圖構建研究
2022-12-23 12:03:00貝太學黃俊琿陳繼文劉洪磊
電子設計工程 2022年24期
貝太學,黃俊琿,陳繼文,盧 博,裴 翦,劉洪磊
(1.山東建筑大學 機電工程學院,山東濟南 250100;2.寧波大學信息科學與工程學院,浙江寧波 315000)
近年來,伴隨著人工智能的發展熱潮,機器人技術蓬勃發展,各式各樣的機器人已經逐步滲透到農業、工業、生產制造業等[1-3]。
ROS(Robot Operating System)[4-7]是一個開放式的系統框架,其中具有很多開源軟件包,最初在2007 年應用于斯坦福大學的機器人研究中。同步定位與地圖構建SLAM(Simultaneous Localization and Mapping)[8-10],是機器人環境感知的重要技術之一,比較常見的分類有基于濾波的SLAM 和基于圖優化的SLAM[11-12]。
該文針對SLAM 算法中的兩種算法,搭建履帶式機器人物理樣機,研究算法的建圖性能。
1 移動平臺系統的總體設計
移動平臺系統主要由本地層與服務器層組成,兩層通過無線網絡完成通信。本地層由操作系統層、驅動層組成,驅動層以兩輪差速履帶式模型為底層設計[13]。整個系統的組成框圖如圖1 所示。
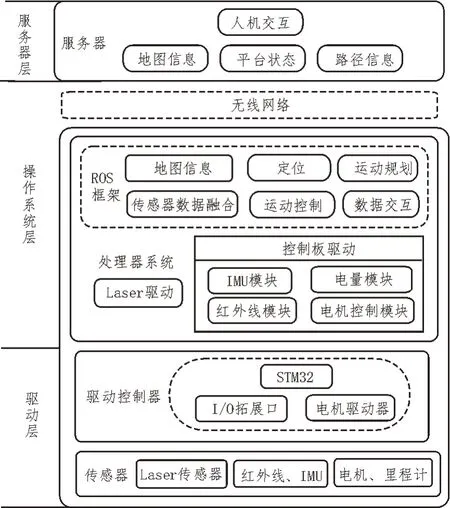
圖1 移動平臺系統框圖
1.1 驅動層
驅動控制器與傳感器構成移動平臺的驅動層[14],傳感器感知外界環境并將環境信息以電信號形式發送給操作系統層,驅動層一方面將環境信息數據預處理并將數據傳遞給操作系統層,另一方面接收操作系統層發送的指令,控制移動平臺進行運動。
1.2 操作系統層
操作系統層主要由ROS 系統與軟件驅動部分組成。ROS 系統主要完成移動平臺的實時定位、運動規劃與地圖構建;軟件驅動部分主要提供通信接口,為底層與上層通信提供通道[15]。
2 系統硬件設計
2.1 硬件系統的組成
操作系統層與驅動層主要由傳感、控制、驅動、執行四部分組成。傳感系統可完成對履帶式機器人自身狀態數據和環境信息的感知。控制系統主要完成運動控制和路徑規劃的功能。驅動系統具有處理信息和傳輸信息的功能,接收控制系統的指令完成對執行機構的控制。執行機構可完成履帶式機器人的移動功能。履帶式機器人整體結構框圖如圖2 所示。
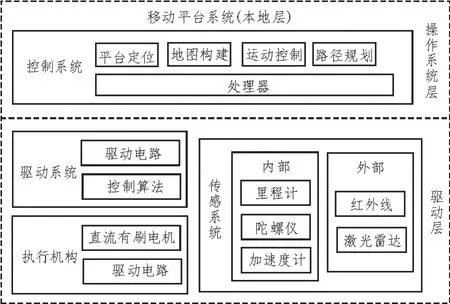
圖2 履帶式機器人整體硬件結構框圖
2.2 硬件選型
控制系統硬件選用樹莓派對雷達點云數據進行處理,同時滿足實時定位、自主建圖、路徑規劃算法的運算。選用GY-85 九軸傳感器與霍爾型編碼器作為內部傳感器。外部傳感器選用激光雷達與紅外線傳感器FC-51。FC-51 可以充分彌補2D 激光雷達的缺陷,能夠實現對平臺周圍物體的掃描監測,準確感應障礙物信息,保持安全距離。激光雷達則選用基于三角測距法的RPLIDAR A1,既能實現周圍環境的360 度掃描,又能優化點云數據位置信息匹配,完成環境信息融合。驅動板電路組成框圖如圖3 所示。
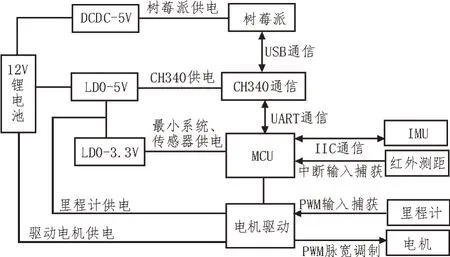
圖3 驅動板電路組成框圖
3 系統軟件設計
3.1 軟件數據傳輸流程
系統軟件部分分為驅動、操作系統、服務器三層結構。其中,驅動層收集內外傳感器的信息,將信息預處理后發送到操作系統層;操作系統層接收傳感器數據、激光雷達數據,借助SLAM 完成系統定位、地圖構建;服務器層借助ROS 平臺,顯示地圖以及移動平臺的位置信息,同時實現路徑規劃目標節點發布功能,進一步由操作系統層按照相應算法實現最優路徑規劃[16]。系統數據流圖如圖4 所示。
如圖4 所示,傳感器數據的采集主要包括激光雷達的點云數據、紅外線的距離信息、加速度計的線速度、陀螺儀的角速度、里程計的線速度,這些數據信息一部分以點云數據形式在服務器層軟件部分進行可視化,一部分以距離信息的形式傳遞給操作系統層,借助SLAM 框架實現地圖構建與定位導航,最后以速度指令傳遞給執行機構,控制移動平臺完成運動。
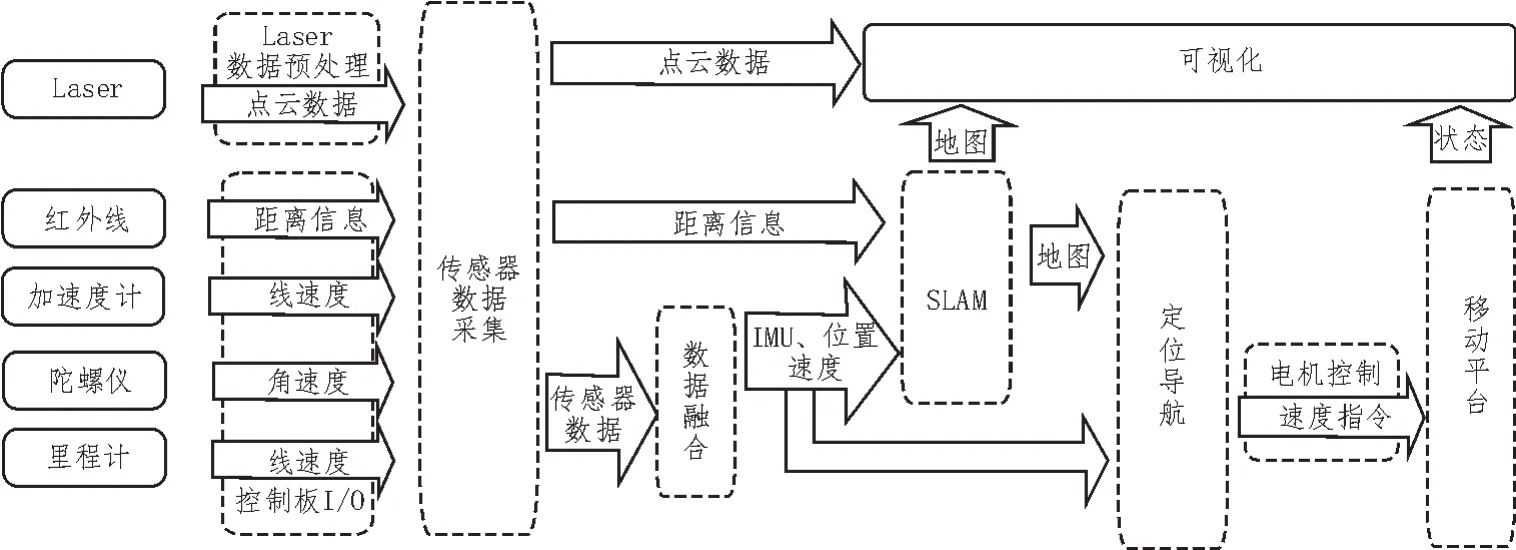
圖4 系統數據流圖
3.2 驅動層程序設計
驅動層主要負責以下四項任務:電池電量檢測、IMU 數據讀取、紅外線障礙檢測、MOVE-BASE[17]。軟件工作流程如圖5 所示。
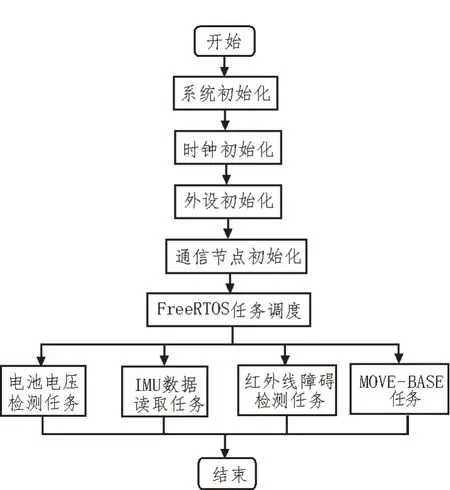
圖5 驅動層軟件流程圖
3.3 PID控制方法實現
兩輪差速履帶式模型運動時,操作系統層不斷地向物理樣機發送事先規劃好路線的速度指令,并根據物理樣機的自身位置信息做出進一步的速度修正。電機的控制則通過增量型的速度環PID 完成。通過物理樣機的穩定運行以及快速響應可以有效避免誤差產生。
3.4 系統本地層通信設計
Rosserial[18]作為ROS 框架下的一種通信協議標準,為驅動層發布、話題訂閱提供了可能,有效實現樹莓派與驅動層的數據傳輸。系統通信示意圖如圖6所示。
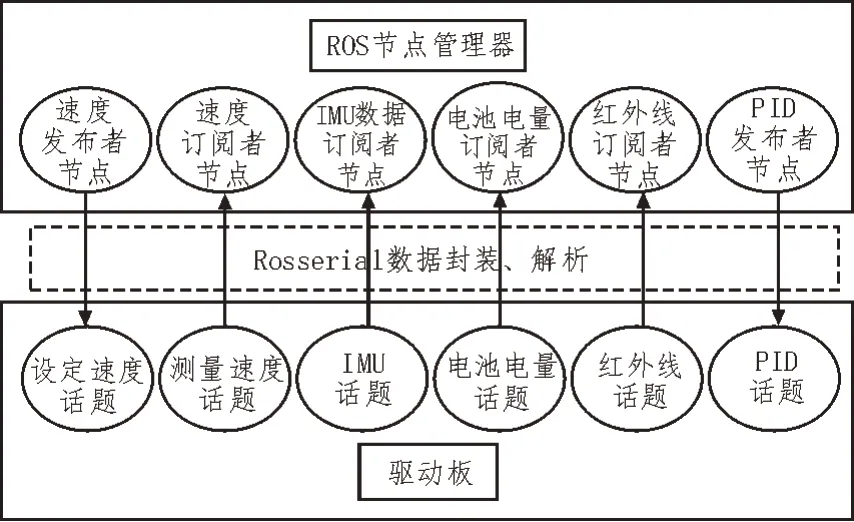
圖6 系統通信示意圖
4 實驗結果分析
該實驗選取兩種實驗環境,分別用Gmapping 算法和Cartographer 算法測試,實驗環境1 為教學樓走廊,環境2 為工作室。
環境1 的測試結果如圖7 所示,對比兩種算法的建圖效果,Gmapping 算法建圖與真實環境誤差較小,在教學樓走廊建圖效果優于Cartographer 算法。
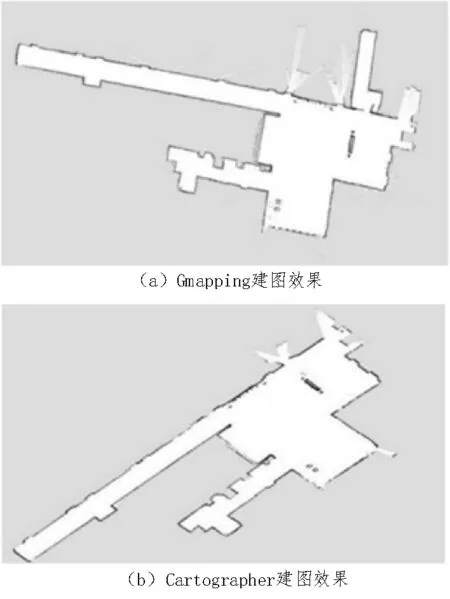
圖7 環境1實際環境建圖
環境2 的實驗結果如圖8 所示。Gmapping 算法構建的地圖在最左側出現障礙物的混疊現象;Cartographer 算法在障礙物數量較多的工作室環境下,建圖效果更優,障礙物與整體地圖的輪廓也更加清晰。
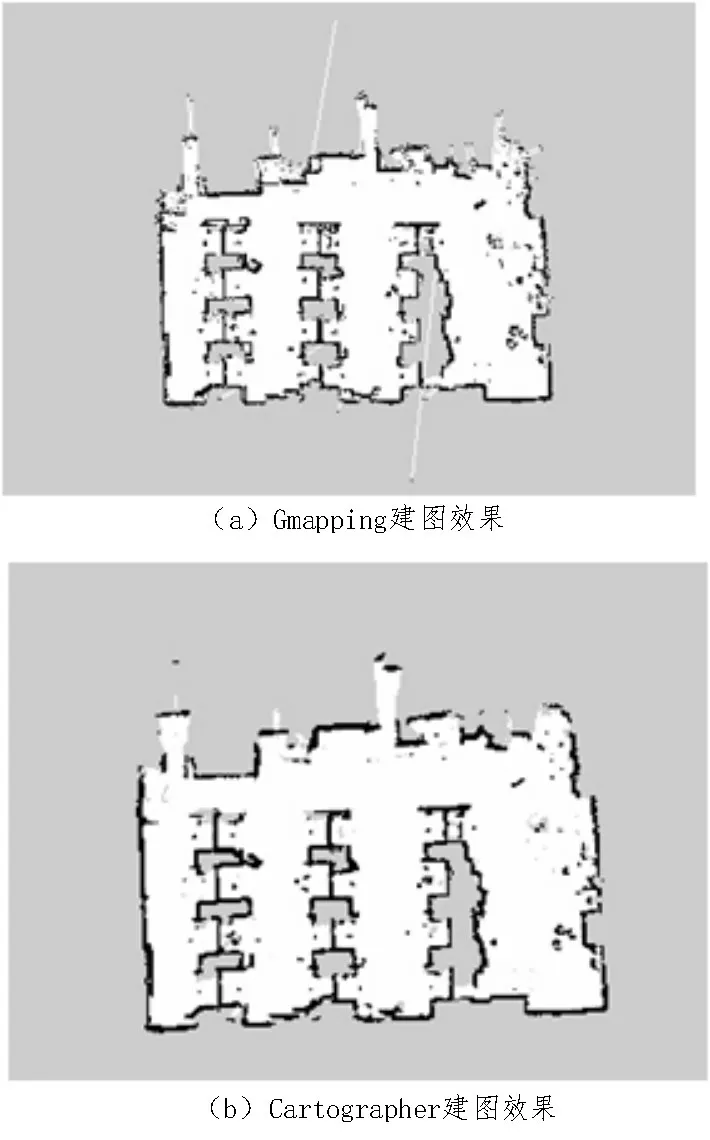
圖8 環境2實際環境建圖
5 結論
該文對基于ROS 的履帶式機器人室內定位及地圖構建進行了研究,主要的研究內容與結論如下:
對移動平臺系統進行設計,選用教學樓走廊環境與工作室環境,選取SLAM 算法中主流的Gmapping算法與Cartographer 算法進行地圖構建實驗。
通過實驗發現,Gmapping 算法在相對簡單的環境中建圖效果較優;在障礙物數量較多的情況下,Cartographer 算法因其幀間匹配算法位姿優化效果的優勢,會使其產生更小的誤差,得到更優的建圖效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
