高職機器人專業“四位一體”教學模式的構建與實施
2022-12-25 07:58:56郝建豹林子其
職業技術 2022年1期
郝建豹,林子其
(廣東交通職業技術學院 工業機器人系,廣州 510800)
0 引言
高職工業機器人技術專業作為培養機器人系統操作與編程、調試與維護以及系統集成崗位工作的,具有創新精神的復合型技術技能人才的新興專業,對機器人實踐要求非常高。目前專業課程實踐教學過程中存在工業機器人及配套設備價格高,實訓設備臺套數少,實訓效率低;工業機器人速度快、誤操作多、實訓安全隱患高[1];高職學生愛動手但實踐及科技創新能力低。高職學生不愛學,自主學習積極性低[2~4]等問題。
鑒于此,筆者所在工業機器人技術專業借鑒德國雙元制教學模式及泛在學習理念,推行了基于專業課程資源平臺、工業機器人技術虛擬仿真實訓中心(Virtual Simulation Practical Training Center-Industrial Robot Technology, VSPTC-IRT)和工業機器人技術公共實訓中心的 “理、虛、實、創”四位一體的教學模式。“四位一體”教學模式的改革實踐提升了實踐安全問題,解決了機器人設備少,學生動手機會少等問題,取得了良好的實踐教學效果。
1 “四位一體”教學模式理論基礎
1.1 德國“雙元制”教學模式
德國“雙元制”教學模式是一種以提高實踐能力為目的的職業教育培訓模式,其主要優點在于4個“雙元”,即學生具有學生身份和企業員工身份的“雙元”,學習場所具有學校與企業(學徒培訓中心)交替進行的“雙元”,授課教師具有理論授課教師及技能培訓教師的“雙元”,學習教材具有理論教材與實訓教材的“雙元”。其精髓在于學生學習過程與企業生產過程緊密相連。
德國 “雙元制”職業教育模式對工業機器人技術專業教學模式的啟示主要有以下3個方面:
(1)高職學生自主學習能力缺乏,不僅需要任課教師理論指導,需要企業工程師深度參與成立諸如技能大師工作室,實施“項目導師制”進行全程化實踐指導。
(2)工業機器人的學習不僅限于課內,更應參加協會、科技創新工作坊、參與教師縱橫向科研項目提高項目實踐能力。
(3)教學資源的開發不應局限于理論教材,結合企業工程項目的實訓資源的開發也是必不可少的。
1.2 泛在學習理論
泛在學習是一種任何人可以在任何地方、任何時刻獲取所需的任何信息的方式,是提供學生一個可以在任何地方、隨時使用手邊可以取得的科技工具來進行學習活動的3A(Anywhere,Anytime,Anydevice )學習[5]。學習者依據自己的學習需求和學習目標,主動利用獲取到的學習資源來學習的過程,是數字化學習和移動學習發展到一定階段的產物[6]。總之,泛在學習理論就是學習者不受時間、地點限制,可以隨時、隨地、隨需的進行學習。
泛在學習理論對工業機器人技術專業教學模式的啟示主要有以下2個方面:
(1)開發數字化教材、課件、微課、視頻等在線開放資源,提供學生理論學習所必需的資源。
(2)機器人實體設備具有應用局限性,可開發線上虛擬仿真實訓工作站(線)等泛在學習環境,打破實體設備的限制。
2 “理、虛、實、創”四位一體教學模式
針對工業機器人技術編程、操作等實踐難點,需要合理構建教學模式,才能完成專業教學目標。結合建設的精品在線開放課程,工業機器人技術公共實訓中心、工業機器人技術虛擬仿真實訓中心、工業機器人技術大學生科技創新工作坊實施“理、虛、實、創”四位一體的教學模式,“理、虛、實、創”為圍繞工業機器人技術專業核心課程展開的“理論學習+虛擬仿真+實訓操作+科技創新”四項教學活動,其相互關系如圖1所示。
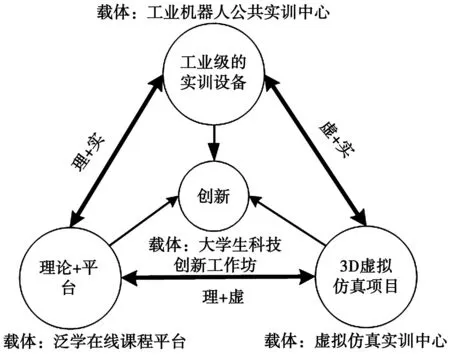
圖1 “四位一體”教學模式模型
結合泛在學習理論,并借鑒 “雙元制”職業教育模式的優點,通過“理、虛、實、創”四位一體教學方式,線上線下混合教學,即線上機器人仿真編程與操作,線下對機器人實際操作,學生快速、熟練掌握編程、操作技巧、并初步提高創新能力,保證實訓操作人身及機器人設備的安全,大幅度提高實踐教學的效果,提高學生對編程能力及操作水平,實現理論教學和實踐的“深度融合”。“四位一體”教學模式的構建,對于教師最大的優點在于易教,對學生來說安全、易學,并解決了實踐教學中存在的效率低等問題。
3 “四位一體”教學模式保障體系
3.1 校企協同打造具有實踐和創新能力的專兼相結合的教學團隊,為“四位一體”教學模式實施提供師資支撐
優秀的教學團隊是保證工業機器人技術專業順利實施“四位一體”教學模式的保障,為此在校級工業機器人技術教學團隊、工業機器人技能大師工作室、工業機器人技術產學研科技平臺基礎上,進一步加強專兼協同的教學團隊建設。具體措施為:
首先,培養高水平專業帶頭人,支持專業帶頭人參加高水平的培訓學習、提升職教理念、跟蹤智能制造業產業發展趨勢,準確把握專業建設、崗位技能、職業等級技能、實踐與創新改革方向等。
其次,與合作企業密切協同,加強骨干教師培養,安排骨干教師到企業學習,同時展開校企合作,每年派出老師分別在寒暑假參加企業的培訓,通過培訓、促使師資隊伍的素質能逐年提高。
最后,聘請行業企業的專業人才擔任技能大師工作室的核心人員,支持其指導大學生科技創新工作坊學生科技創新,綜合實訓等。
總之,依托科技平臺和技能大師工作室,提高團隊整體素質,有助于“四位一體”教學模式的順利實施。
3.2 借助課程教學資源平臺,進行理論學習
在學生進行仿真實訓及實際機器人操作前,學生通過課程平臺進行課前預習。為便于學生線上自主學習不受時間、空間限制,工業機器人技術專業8門專業核心課程在超星泛雅平臺建設了在線開放課程,其中1門被評為省級精品在線開放課程,4門被評為校級精品在線開放課程。借助超星泛雅平臺電腦 PC 端和移動手機端的資源,方便學生隨時隨地查看視頻、微課、模擬考試、文檔和 PPT 等課程資源。在線開放課程的建設為“理、虛、實、創”四位一體的教學模式理論內容的學習提供了平臺。
3.3 構建“虛、實雙中心”,落實教學保障
泛在學習環境——VSPTC-IRT以工業機器人四大家族之一的ABB公司的 RobotStudio軟件為核心,構建了20多個3D 虛擬環境模擬真實操作,該VSPTC-IRT于2019年被評為校級虛擬仿真實訓中心。
基于“先虛后實、虛實融合”原則,在虛擬仿真學習的基礎上,學生去實訓中心進行針對性訓練。工業機器人技術公共實訓中心于2018年評為校級實訓基地。 “虛、實雙中心”的構建可滿足如下能力的培養:
(1)基礎操作技能培養:熟悉和掌握工業機器人的線性運動、手動操作、示教器控制運動等基本操作;
(2)機器人典型應用仿真操作與編程能力提高:了解和掌握機器人碼垛應用、機床上下料應用、搬運應用等操作與編程要點;
(3)綜合應用能力培養:智能制造生產線提高學生綜合操作技能解決工程問題的能力;
(4)發展與創新技能提升:依托大學生科技創新工作坊,學生可改進仿真及實體生產線,設計機器人集成工作站,提高創新能力。
3.4 打造大學生科技創新工作坊,提升學生科技創新能力以及職業能力
“理、虛、實、創”四位一體教學模式的核心目的就是提高學生的職業能力以及科技創新能力,成立工業機器人技術大學生科技創新工作坊是落實此目標的途徑,工業機器人技術大學生科技創新于2018年評為校級大學生科技創新工作坊。大學生科技創新工作坊的學生選拔于工業機器人協會,其指導教師需具有2年以上企業工作經歷的工程師或高級技師。學生完成的項目來自于工業機器人工程應用科技服務特色創新平臺、工業機器人技術應用產學研科技平臺的縱橫向科研項目,如“面向快速插件的雙臂機器人開發”等。
4 “四位一體”教學模式案例剖析
教學模式實施是達成專業教學目標的具體執行環節。工業機器人機床上下料是工業機器人典型應用之一,機器人和機床都屬于比較昂貴的設備,也是最容易出現碰撞的教學案例。以機器人機床上下料速度優化設計為例說明以學生為中心的“四位一體”混合、互動式的教學新模式的教學過程,實施中基于“課堂+線上線下”,遵循“課前預習、課中學習、課后拓展及創新”的教學原則,具體設計如表1所示。
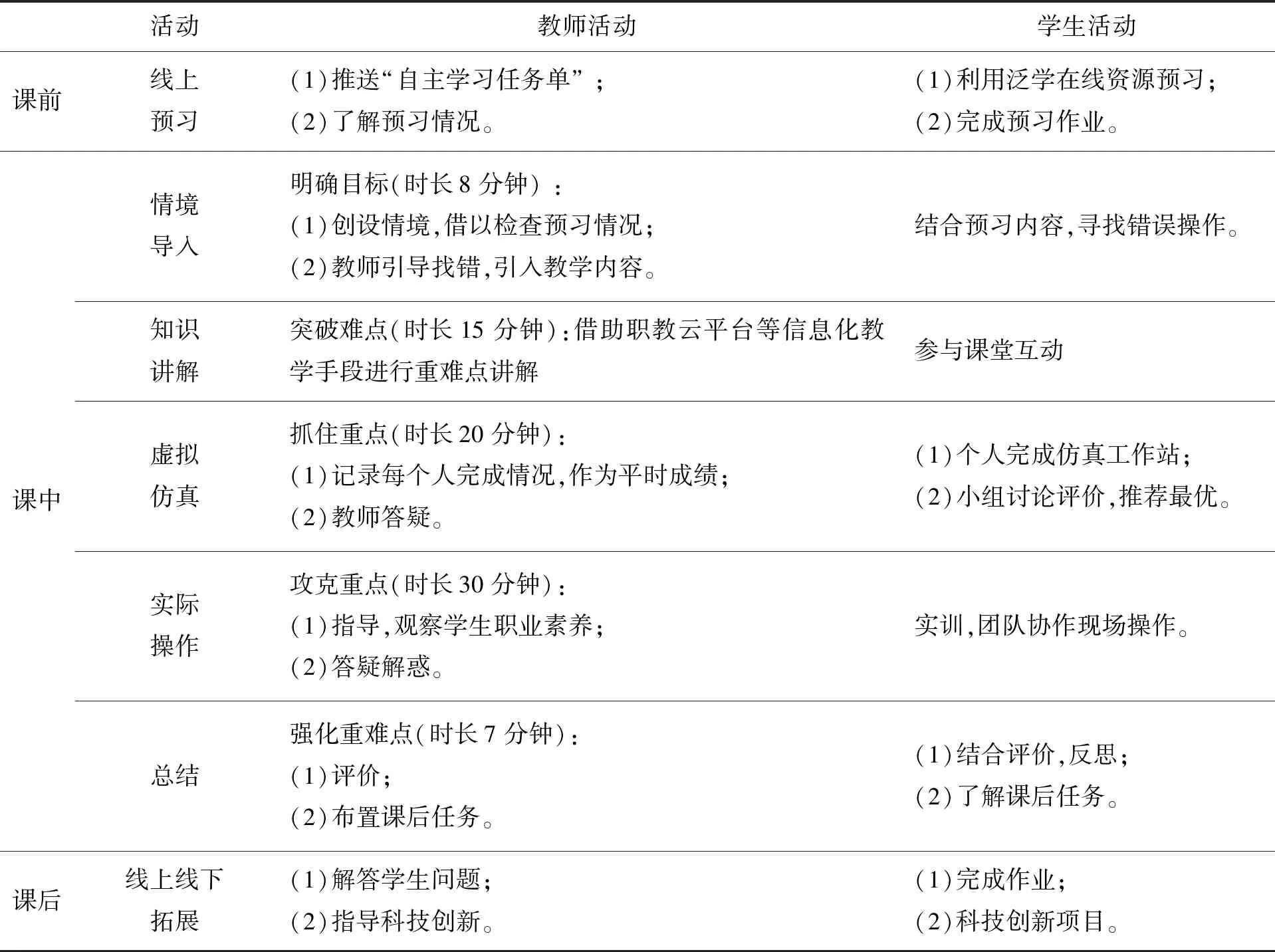
表1 “四位一體”實踐教學模式設計
4.1 課前自主學習
學生根據泛雅學習平臺的“自主學習工作頁”,了解教學目標、需掌握的知識點與技能點、重難點和教學實施過程。學生自主學習在線平臺上的視頻、微課、動畫等學習資源,根據自己學習情況利用虛擬仿真實訓中心的機床上下料工作站進行仿真驗證與測試。學生對自學出現的問題可以在線展開討論。教師應當設置任務點,并根據學生的學習狀況及時指導,充分調動學生的自主學習能力。
實施中任務點學生應自主學習、自主體驗,便于構建屬于自己的學習經驗和知識體系。虛擬仿真項目應協作完成,可相互取長,可避免個別學生不能完成項目而影響積極性。教師應關注討論區,關注后臺完成任務點的人數,觀看微課時長等統計信息,為課堂組織做準備。
4.2 課堂學習
“四位一體”的教學模式課堂實施中以教師主導、學生主體,目標是打造 “動起來”的有效、高效實體課堂。課堂中分為創設情境導入、根據自主學習情況及時總結的知識點與技能點講解、 虛擬仿真、實際操作、總結總評五個教學環節。
(1)創設情境導入:以某同學實操編程視頻,視頻是描述“速度”,重點顯示機器人空載和搬運工件時速度一致以及接近對象時速度仍然沒變化。結合預習內容,學生尋找錯誤為教學切入點。同時檢測預習情況以決定授課內容。
(2)重難點講解:借助手機學習通APP等信息化教學手段,講解中應注意與學生互動。
(3)虛擬仿真:學生每人有個仿真軟件程序練習包示,練習界面如圖2所示。應用指令在虛擬仿真實訓工作站進行速度優化,仿真編程,利用RobotStudio展示速度優化前后效果對比,小組討論評價任務指令掌握情況,推薦最優,下載到實體站。保證全體學生動起來,教師注意學生表現,進行個性化指導,并記錄學習的難點。
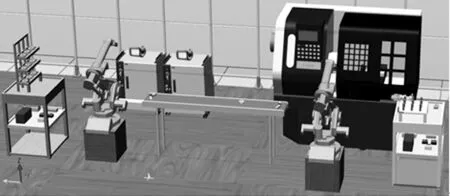
圖2 機器人機床上下料虛擬仿真工作站
(4)實際操作:現場操作應用、加深對指令的理解。機器人機床上下料實體工作站如圖3所示。機器人機床上下料實體工作站以可視化的虛擬仿真編程方式改進并展示系統的速度性能,仿真成功后下載到實體平臺練習,在這個過程教師觀察學生職業素養包括安全意識,并根據學生的表現評定學生的平時成績。

圖3 機器人機床上下料實體工作站
(5)總結和結束課程:教師對學生表現進行評價,對重難點進行講解和答疑解惑。
實施中情境導入要能激發學生觀看興趣和探究欲望;知識講解應采用多樣化互動形式;充分利用設備,鼓勵學生在仿真好的情況下,盡快實操;教師應注重對學生的評價。
4.3 課外拓展及創新
課后教師布置任務,利用VSPTC-IRT編程實現多機器人多機床柔性制造生產線虛擬仿真系統,其生產線界面如圖4所示,并把編程、速度設計等完成情況上傳到虛擬仿真實訓中心,以檢測學生知識面拓展情況。

圖4 多機器人多機床柔性制造生產線虛擬仿真系統
依托大學生科技創新工作坊,以挑戰杯、互聯網+大學生科技創新創業比賽為契機,鼓勵學生課外科技創新,激發學生學習興趣。學生的課外創新——多工業機器人硯臺制作虛擬仿真生產線,如圖5所示。該創新作品也獲得全國工業機器人虛擬仿真大賽作品一等獎。實踐證明,“理、虛、實、創”四位一體教學模式的實施提高了學生的創新能力。
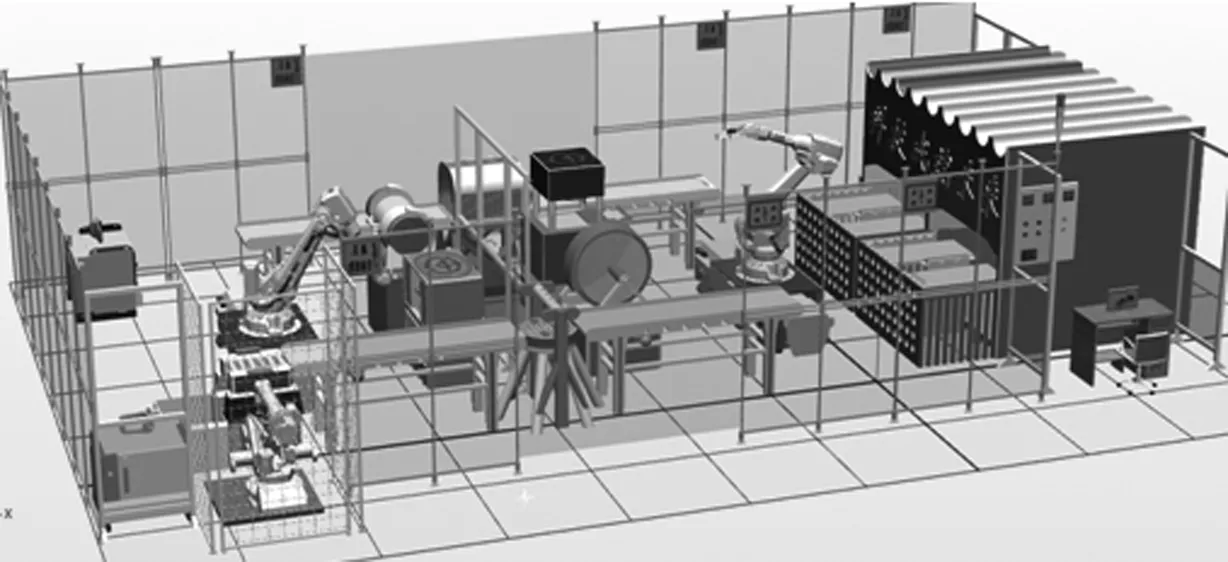
圖5 多機器人硯臺制作虛擬仿真生產線
5 結語
“四位一體”教學模式實施在工業機器人技術課程教學中的應用,明顯提升了教學質量和人才培養質量。該模式獲得2019年廣東省教學成果獎二等獎,對推動“互聯網+”背景下高職教學模式改革具有借鑒意義。
猜你喜歡
少男少女·教育管理(2022年3期)2022-05-12 23:54:31
裝備制造技術(2020年12期)2020-05-22 09:25:38
少兒科學周刊·兒童版(2017年9期)2018-03-15 15:00:11
兒童故事畫報·發現號趣味百科(2017年4期)2017-06-30 12:41:53
電子制作(2017年8期)2017-06-05 09:36:15
兒童故事畫報·發現號趣味百科(2016年6期)2016-08-19 06:35:19
信息記錄材料(2016年4期)2016-03-11 15:22:54
新課程研究(2016年21期)2016-02-28 19:28:26
兒童故事畫報·發現號趣味百科(2015年10期)2016-01-20 00:47:36
學習月刊(2015年18期)2015-07-09 05:41:22