電動汽車自適應能量回收控制的分析
2022-12-29 06:06:54王春生吳光耀周升輝
汽車實用技術 2022年23期
王春生,吳光耀,周升輝,李 偉
電動汽車自適應能量回收控制的分析
王春生,吳光耀*,周升輝,李 偉
(比亞迪汽車工業有限公司 產品規劃及汽車新技術研究院,廣東 深圳 518118)
針對電動汽車能量回收工況,研究了一種提高駕駛性和能量回收效率的策略。首先依據汽車動力學模型建立了預估車輛重量的模型,在滑行工況時,依照車重和道路坡度來確定不同的回饋扭矩系數,從而確定最終的目標滑行回饋扭矩;在制動工況,依據制動深度確定目標減速度,然后依據預估車重和目標減速度確定制動回饋扭矩系數,從而確定最終的制動回饋目標扭矩,依據整車能力再進行液壓制動和電制動的分配。通過實車對比驗證,不僅提高了駕駛性,而且在一定程度上提高了能量回收率,節省了電量。
滑行回饋;制動回饋;車重預估;扭矩分配;電動汽車;能量回收控制
近年來電動汽車產銷量迅猛增加,作為其核心技術之一的能量回收技術備受關注。電動汽車能量回收技術是一種汽車節能技術,當電動汽車處于滑行或者制動工況時,將車輛動能通過合適的控制方法來控制驅動電機發電,所產生的電能存儲在動力電池中,以備整車驅動時使用,有效提高能量利用率、駕駛舒適性以及汽車行駛里程。因此,對電動汽車的能量回收進行深入的控制研究有著重要的意義[1]。
電動汽車能量回收控制目前主要包括滑行工況能量回收和制動工況能量回收[2]。滑行工況是在既沒有加速踏板也沒有制動踏板開度時,車輛依靠驅動電機的反向發電扭矩和各種阻力作用下逐漸減速的工況;制動工況是在無加速踏板開度而有制動踏板開度時,車輛依靠驅動電機的反向發電扭矩、液壓制動力和各組阻力共同作用下而逐漸減速的工況[3]。
無論是滑行工況下的能量回收還是制動工況下的能量回收,目前市場上電動車的控制策略都是在電機和電池的能力下,依照車速為基準的查表回收扭矩。此種回收扭矩的獲取是有一些弊端的,如車輛的載重量不同時,仍然按照以車速為基準查表的回收扭矩,在同樣的路況和車速下就會造成車輛的減速度不一致,載重量大時減速度偏大,而載重量小時減速度偏小;同樣,在不同的路面或者是在不同的坡度下,也會由于載重量的不同造成整車的減速度不一致[4]。此弊端會帶來兩個方面的影響,一是影響駕駛員的操作舒適性,駕駛員容易對減速度造成誤判從而影響駕駛安全;二是無法最大限度地利用車輛的慣性回收能量,造成能量浪費。
1 車重預估模型研究
假如汽車在水平道路上等速行駛時,必須克服來自地面的摩擦阻力和來自空氣的空氣阻力,車輛才能等速行駛;當汽車在坡道上行駛時,除考慮摩擦阻力和空氣阻力外,還必須考慮車輛重力沿著坡道的分力,即坡度阻力。
作用在驅動輪的扭矩主要是驅動電機產生的扭矩通過傳動系統傳至車輪上的。對于裝有變速箱和減速器的傳動系統,傳至車輪端的扭矩還要考慮傳動比和傳動效率。
所以,汽車的行駛方程式為
t=f+w+i(1)
式中,t為作用于車輪的驅動力;f為滾動阻力;w為空氣阻力;i為坡度阻力。
t=tqg0/(2)
式中,tq為驅動電機扭矩;g為表示變速箱的傳動比;0表示主減速器的傳動比;表示傳動系的機械效率;為車輪半徑。
f=?cos(3)

i=?sinα (5)
式中,為車輛重力;為道路摩擦系數;為道路傾角;D為空氣阻力系數;為迎風面積;a為汽車車速。
1.1 驅動工況與滑行工況
當車輛處于驅動工況時,加速踏板信號不為零;當車輛處于滑行工況時,加速踏板和制動踏板都為零。此時,電機輸出相應的驅動扭矩,由車輛動力學分析可得[4]

式中,驅動工況時,tq為電機驅動扭矩;滑行工況時,tq為電機回饋扭矩。
1.2 制動工況
當車輛處于制動工況時,若滿足能量回收條件,則此時的制動力包括機械制動力和電機再生制動力矩兩部分,根據動力學可得

式中,b為機械制動力矩;tq為制動工況下的電機回饋扭矩。
由于制動工況下的機械制動力矩無法準確地獲得,所以整車車重的預估模型在整車驅動和滑行工況時進行。
當車輛滿足:
(1)整車運行工況為整車驅動或者滑行工況;
(2)牽引力控制系統(Traction Control Sys- tem, TCS)及制動防抱死系統(Antilock Brake System, ABS)未激活;
(3)方向盤轉角在±40°范圍內;
(4)制動深度為0%,制動深度百分比由制動模塊控制器通過控制器局域網絡(Controller Area Netwok, CAN)總線發送至整車控制器;
(5)道路坡度≤10%。
當以上條件滿足5秒后進行整車質量的預估,由于對于一款車輛來說,變速箱的傳動比g、主減速器的傳動比0、傳動系的機械效率T、車輪半徑、空氣阻力系數D,迎風面積都為固定值或者可確定范圍的參考值,電機驅動扭矩tq、汽車車速a和道路傾角可通過整車傳感器獲取,所以可預估得到整車的質量。
2 滑行工況能量回收
根據實際的行駛狀況,汽車進入滑行工況有3種途徑:(1)從驅動到滑行,指汽車在驅動狀態時迅速松掉加速踏板;(2)從制動到滑行,指汽車在制動減速狀態時迅速松掉制動踏板;(3)從自然起步到滑行,指汽車在自動起步后進入長下坡且車速大于自動起步穩定車速。
采用傳統的固定車速查表確定回收扭矩的方式無法保證滑行回饋減速度的一致性;同時對于載重量較大的貨車來說,在空載和滿載下采用同樣的滑行回饋扭矩無法保證前后駕駛感一致,也將使得回收效率大大降低。
本分析仍以車速為基準,查表確定不同車速下的基礎回饋扭矩;但需要以整車的空載質量 2 200 kg為基礎,如表1所示,匹配標定不同載荷下的回饋扭矩系數,最終的目標回饋扭矩為基礎回饋扭矩乘以回饋扭矩系數獲得。該系數的取值依據為基于任一種路面工況,不同的荷載下滑行回饋減速度與空載時的滑行減速度保持一致。
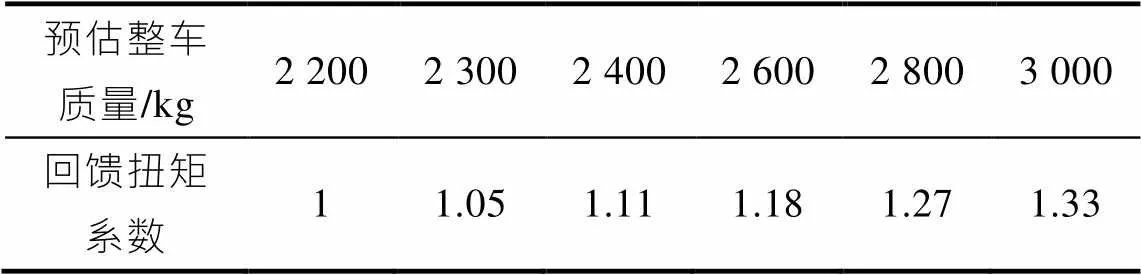
表1 回饋扭矩系數標定匹配表
在道路坡度為0時,則滑行回饋需求扭矩等于不同車速下查表確定回饋扭矩與回饋扭矩系數乘積。
當有道路坡度時,以整車的空載質量為基礎,匹配標定不同道路坡度的坡度回饋扭矩系數如表2所示。該坡度回饋系數的確定原則類似于回饋扭矩系數,以車輛空載時在平直路面的滑行回饋減速度為基準,保持不同坡度的滑行減速度一致。
在有道路坡度時,則滑行回饋需求扭矩等于不同車速下查表確定回饋扭矩與回饋扭矩系數和坡度回饋系數乘積。
3 制動工況能量回收
傳統的制動控制為電機回饋制動和液壓制動疊加作用的,并且液壓制動是不可控的。為提高汽車回收制動能量的效率,采用傳統的制動能量回饋形式是無法滿足要求的。因此,采用可控制的液壓制動系統和制動能量回饋系統耦合而成的液電混合制動系統,根據行駛工況和制動強度合理地協調制動力分配關系才可以最終提高制動能量回收效率。主要包括兩方面內容:一方面是有效地將前后輪的制動力進行合理分配,保證行駛的安全性和穩定性;另一方面是合理地建立液壓制動力和回饋制動力之間的比例關系,以保證最大的制動能量回收率[5-6]。
本分析采用方案如表3所示,由制動深度百分比查表確定制動目標減速度,制動深度越大,需求減速度就越大,該需求減速度的取值依據為原車輛的制動減速度測試和人為需求。如表4所示,再由制動減速度和預估整車質量查表確定制動回饋扭矩系數。

表3 制動深度百分比確定制動減速度標定匹配表
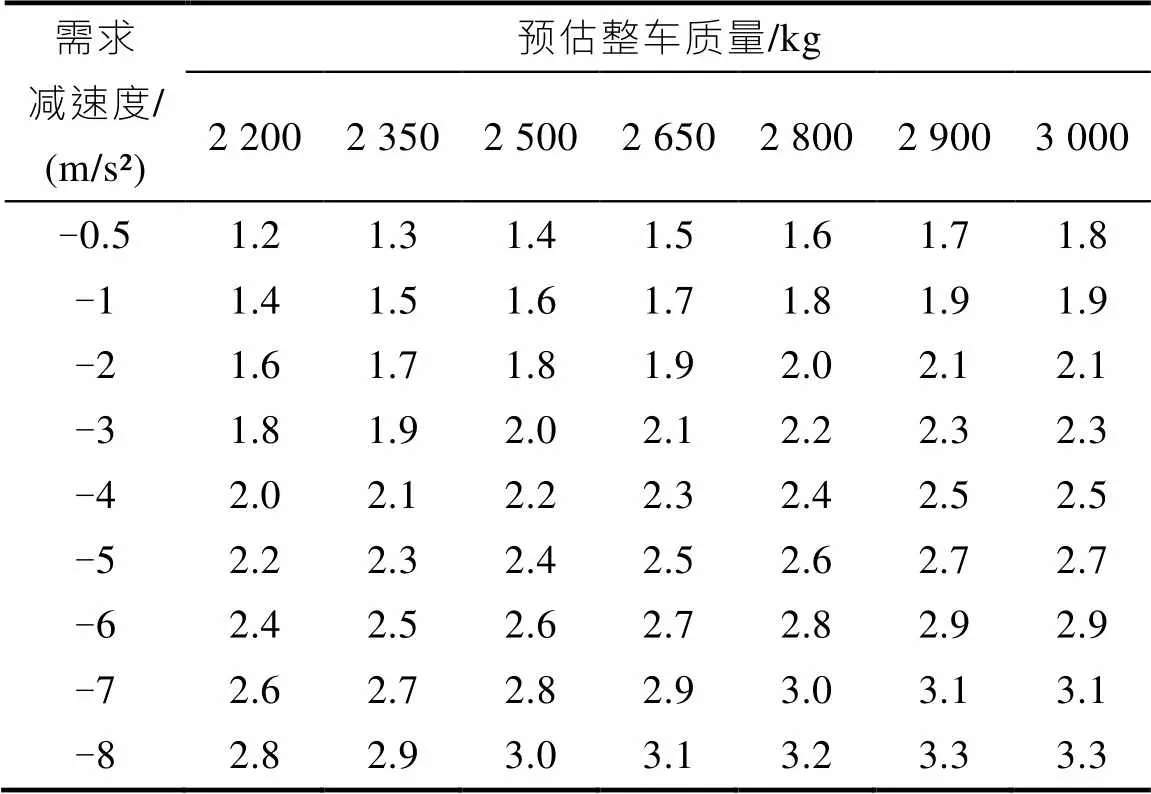
表4 制動回饋扭矩系數標定匹配表
則制動回饋需求扭矩等于不同車速下查表確定回饋扭矩與制動回饋扭矩系數乘積。
整車制動回饋需求目標扭矩得到后,需要合理地分配液壓制動和回饋制動的關系。如圖1所示,回饋制動能力受諸多因素的影響,在考慮回饋能力的同時,需要留有余量分配以合適的回饋制動扭矩,以防止電池的過充損壞電池;同時,為了保證能量回收效率,又不能分配以嚴重低于需求和能力的回饋制動扭矩。
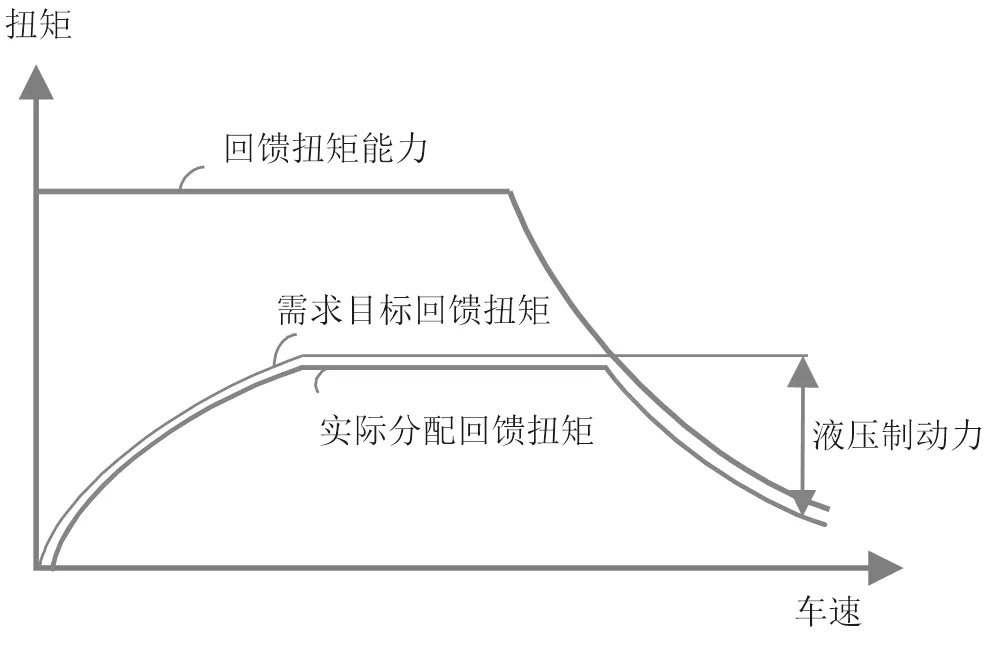
圖1 回饋扭矩分配示意圖
4 整車驗證
為驗證自適應能量回收控制策略的效果,選擇的車輛參數如表5所示。效果驗證采用了兩組對比測試,兩輛同型號車輛在滿電情況下同時出發,以同樣的路況和車速行駛。第一組為車輛空載負荷下傳統能量回收控制方式與自適應能量回收方式的對比;第二組為車輛滿載下傳統能量回收控制方式與自適應能量回收方式的對比。

表5 測試車輛技術參數
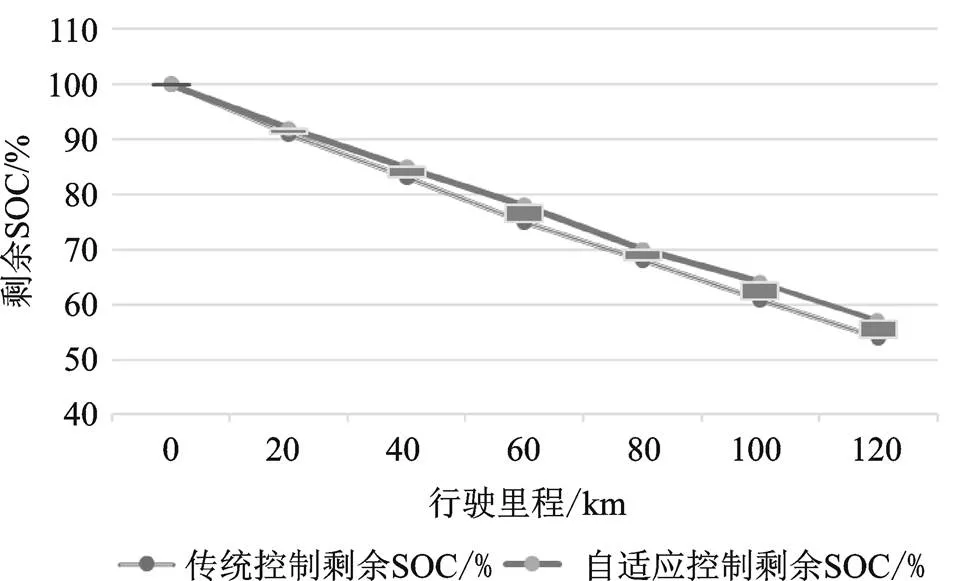
圖2 車輛輕載對比
由圖2可以看出,輕載負荷下,自適應能量回收控制策略更節省電量,而且隨著行駛里程增多,節省效果更明顯,在120 km的測試里程中,可節省3%的電量;由圖3可以看出,重載負荷下,由于采用了自適應能量回收,比輕載負荷下有更明顯的省電效果,在120 km的測試里程中,可節省5%的電量。
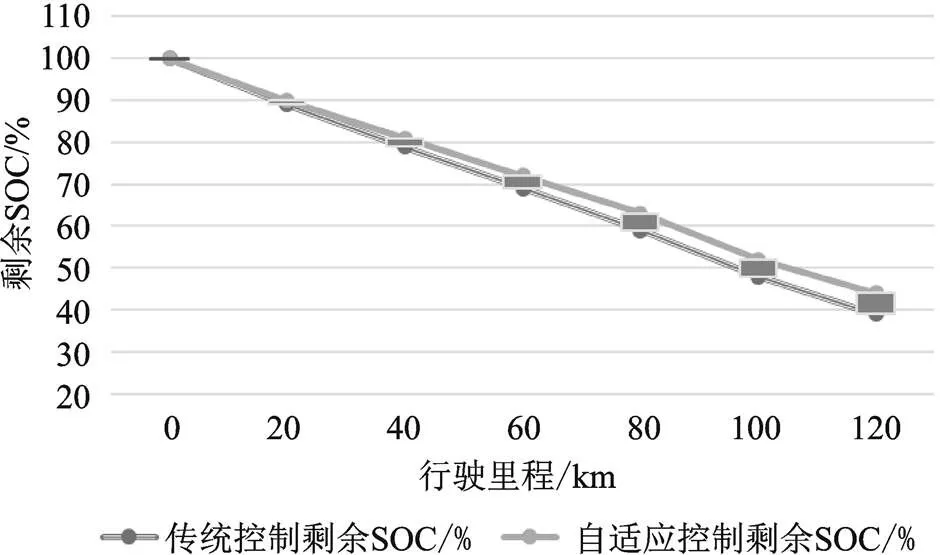
圖3 車輛滿載對比
5 結論
針對目前電動汽車能量回收策略單一,無法自適應載重量變化較大從而造成駕駛性能和能量回收效率降低的情況,研究了一種提高駕駛性和能量回收效率的策略。本研究以汽車動力學模型建立了預估車輛重量的模型,在滑行工況時,依照車重和道路坡度來確定不同的回饋扭矩系數,從而確定最終的目標滑行回饋扭矩;在制動工況,依據制動深度百分比確定目標減速度,然后依據預估車重和目標減速度確定制動回饋扭矩系數,從而確定最終的制動回饋目標扭矩。依據整車能力再進行液壓制動和電制動的分配。通過實車對比驗證,不僅提高了駕駛性,而且在一定程度上提高了能量回收率,節省了電量。
[1] 譚密.電動汽車能量回收控制策略研究[D].十堰:湖北汽車工業學院,2018.
[2] 譚密,羅永革,黃兵峰,等.電動汽車滑行工況能量回收規律探究[J].湖北汽車工業學院學報,2017,31(4): 58-61.
[3] 孫慶樂,于海波,李賀龍,等.電動汽車滑行工況能量回收策略探究[J].車輛與動力技術,2020(2):1-5.
[4] 余志生.汽車理論[M].北京:機械工業出版社,2015.
[5] 王浩.電動汽車制動能量回收控制策略研究[D].沈陽:沈陽理工大學,2020.
[6] 張洪威,段恒,穆凱寧,等.電動汽車制動能量回收系統探究[J].工程技術研究,2018(13):74-75.
Analysis of Adaptive Energy Recovery Control for Electric Vehicles
WANG Chunsheng, WU Guangyao*, ZHOU Shenghui, LI Wei
( Product Planning and New Technology Research Institute, BYD Auto Industry Company Limited,Shenzhen 518118, China )
Research on adaptive energy recovery control of electric vehicles a strategy to improve driving performance and energy recovery efficiency is studied for the energy recovery condition of electric vehicles. Firstly, a model to estimate the vehicle weight is established based on the vehicle dynamics model. In the coasting condition, different feedback torque coefficients are determined according to the vehicle weight and road slope to determine the final target coasting feedback torque.In the braking condition, the target deceleration is determined according to the braking depth, and then the brake feedback torque coefficient is determined according to the estimated vehicle weight and target deceleration to determine the final brake feedback target torque, and then the hydraulic braking and electric braking are distributed according to the vehicle capacity.Through the comparison and verification of real vehicles, it not only improves the driving performance, but also improves the energy recovery rate to a certain extent and saves electricity.
Sliding feedback;Braking feedback;Vehicle weight estimation;Torque distribution;Electric vehicle;Energy recovery
U467
A
1671-7988(2022)23-25-04
U467
A
1671-7988(2022)23-25-04
10.16638/j.cnki.1671-7988.2022.023.005
王春生(1981—),男,高級工程師,研究方向為新能源汽車整車控制系統策略制定、軟件開發與標定、整車能量管理、整車仿真技術,E-mail:wang.chunsheng@byd.com。
吳光耀(1984—),男,碩士,中級工程師,研究方向為新能源整車控制器軟件開發,標定匹配及軟件集成測試,E-mail:guangyao610@126.com。
