基于AVL Cruise的某純電動(dòng)汽車動(dòng)力系統(tǒng)匹配設(shè)計(jì)
2022-12-29 06:06:46繆明雅
汽車實(shí)用技術(shù) 2022年23期
關(guān)鍵詞:經(jīng)濟(jì)性
繆明雅
基于AVL Cruise的某純電動(dòng)汽車動(dòng)力系統(tǒng)匹配設(shè)計(jì)
繆明雅
(江蘇省吳江中等專業(yè)學(xué)校 現(xiàn)代制造部,江蘇 蘇州 215299)
動(dòng)力系統(tǒng)匹配是純電動(dòng)汽車開發(fā)過程中的關(guān)鍵,文章按照某純電動(dòng)汽車的設(shè)計(jì)性能要求,擬對(duì)該車的動(dòng)力系統(tǒng)進(jìn)行匹配設(shè)計(jì),從而達(dá)到較好的動(dòng)力性能與經(jīng)濟(jì)性能。文章根據(jù)設(shè)計(jì)要求進(jìn)行理論計(jì)算,并對(duì)驅(qū)動(dòng)電機(jī)、驅(qū)動(dòng)方案、傳動(dòng)比等主要部件進(jìn)行參數(shù)匹配,再運(yùn)用AVL Cruise軟件進(jìn)行整車建模、仿真,對(duì)不同方案的仿真結(jié)果進(jìn)行了分析,擇優(yōu)確定最優(yōu)化方案。結(jié)果表明,該車所選用的動(dòng)力系統(tǒng)方案滿足設(shè)計(jì)要求,且傳動(dòng)比方案具有較好的動(dòng)力性和經(jīng)濟(jì)性。
AVL Cruise;純電動(dòng)汽車;動(dòng)力系統(tǒng);系統(tǒng)匹配
動(dòng)力系統(tǒng)匹配是保證純電動(dòng)汽車開發(fā),并使其具有較好的動(dòng)力性能與經(jīng)濟(jì)性能的關(guān)鍵環(huán)節(jié)。本文按照某純電動(dòng)汽車整車設(shè)計(jì)性能要求,擬對(duì)驅(qū)動(dòng)電機(jī)、驅(qū)動(dòng)方案、傳動(dòng)比等主要部件進(jìn)行參數(shù)匹配,并通過AVL Cruise軟件進(jìn)行整車建模、仿真,對(duì)不同方案的仿真結(jié)果進(jìn)行了分析,擇優(yōu)確定最優(yōu)化方案。
1 車輛性能要求及主要思路
樣車主要應(yīng)用在路面狀況良好的城市路況,須充分考慮市內(nèi)交通情況,整備質(zhì)量為1 535 kg,滿載質(zhì)量為1 910 kg,迎風(fēng)面積為2.55 m2,風(fēng)阻系數(shù)為0.34,輪胎滾動(dòng)半徑為319 mm,性能要求整車最高車速≥160 km/h,最大爬坡度≥20%,0~100 km/h加速時(shí)間<15 s,中國(guó)乘用車行駛工況(China Light-duty Vehicle Test Cycle Passenger Car, CLTC-P)百公里電耗<15 kWh。
第一步:針對(duì)整車性能要求,計(jì)算整車技術(shù)參數(shù),初步確定動(dòng)力系統(tǒng)方案。第二步:選用AVL Cruise軟件為分析工具,對(duì)匹配對(duì)象進(jìn)行建模仿真,確定是否滿足性能要求[1]。第三步:在滿足性能要求的基礎(chǔ)上,對(duì)傳動(dòng)系統(tǒng)進(jìn)行優(yōu)化、仿真。第四步:開展比較分析,確定優(yōu)化方案。
2 動(dòng)力匹配分析
2.1 驅(qū)動(dòng)電機(jī)選型
基于樣車參數(shù)、動(dòng)力性要求和應(yīng)用工況,根據(jù)汽車行駛方程式,汽車在最高車速下的行駛阻力功率e為
按照整車性能參數(shù)計(jì)算,最高車速max為 160 km/h時(shí),行駛阻力功率e為57.3 kW。因此,初定某電機(jī),該電機(jī)的最大轉(zhuǎn)速為10 000 r/min,在轉(zhuǎn)速3 000 r/min以下可輸出最大轉(zhuǎn)矩,在3 000 r/min以上范圍輸出功率達(dá)75 kW以上,保證了功率在較廣的轉(zhuǎn)速范圍內(nèi)高于行駛阻力功率[2]。
2.2 驅(qū)動(dòng)方案選取
采用一臺(tái)驅(qū)動(dòng)電機(jī)作為動(dòng)力源,采用差速半軸式進(jìn)行傳動(dòng)。差速半軸式傳動(dòng)是傳統(tǒng)汽車的主流傳動(dòng)方式,便于整車布置,技術(shù)成熟、成本偏低,且具有良好的行駛性能和操控性能。如圖1所示,該電機(jī)最大轉(zhuǎn)速max為10 000 r/min,恒扭矩調(diào)速、恒功率調(diào)速的轉(zhuǎn)速點(diǎn)n為3 000 r/min,考慮到電機(jī)從基頻向上調(diào)速的范圍足夠大,即max/n≥2.5,擬采用固定速比。
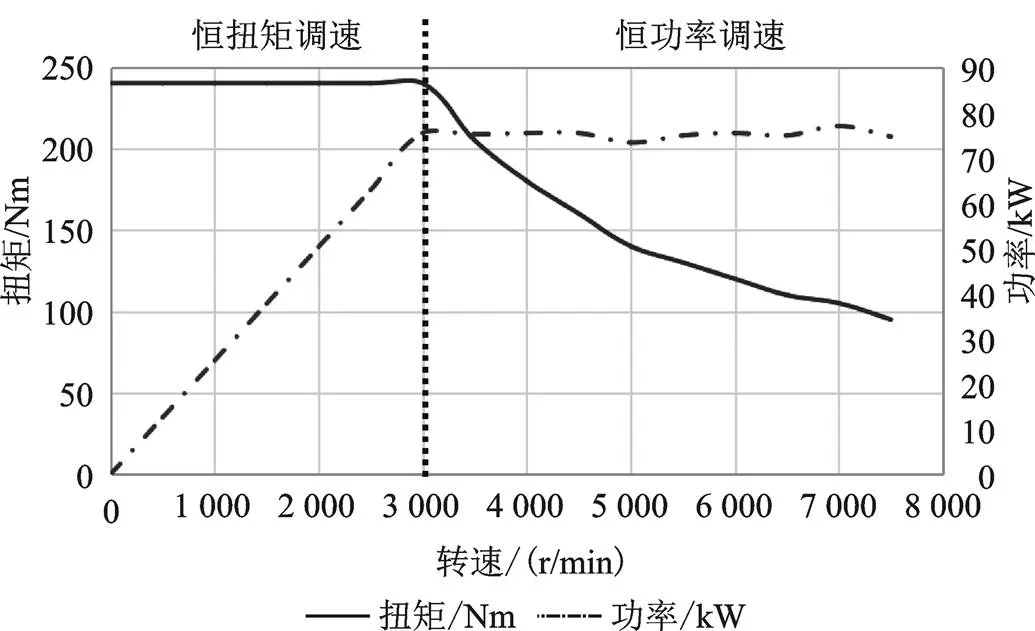
圖1 電動(dòng)機(jī)機(jī)械特性
2.3 傳動(dòng)比確定
車輛處于最大爬坡(轉(zhuǎn)矩最大)工況時(shí),按照設(shè)計(jì)要求,即不低于20%時(shí),傳動(dòng)比需滿足
計(jì)算得,最小傳動(dòng)比min為2.2。
根據(jù)電機(jī)轉(zhuǎn)速與行駛速度的關(guān)系式,在最高行駛車速160 km/h下,且考慮到最高車速下保持電機(jī)最高轉(zhuǎn)速的90%左右,經(jīng)計(jì)算,最大傳動(dòng)比max為6.8。
2.4 蓄電池選擇
在AVL Cruise建模過程中,考慮到根據(jù)CLTC-P工況下的百公里平均能耗作為評(píng)判經(jīng)濟(jì)性的主要標(biāo)準(zhǔn),且側(cè)重通過優(yōu)化傳動(dòng)比的匹配選型來(lái)優(yōu)化性能,因此,僅對(duì)蓄電池進(jìn)行簡(jiǎn)單建模,蓄電池總電量48 kWh。
3 純電動(dòng)汽車仿真
3.1 模型建立
AVL Cruise是一款可視化的整車仿真軟件,建立整車模型時(shí),需要明確機(jī)械連接關(guān)系,對(duì)各部件進(jìn)行參數(shù)設(shè)置,設(shè)置信息流[3]。如圖2所示,在軟件中建立整車模型,明確機(jī)械連接關(guān)系。
整車、電機(jī)、車輪參數(shù)設(shè)置,如圖3、圖4所示。
通過軟件的多參數(shù)計(jì)算功能,將主減速器傳動(dòng)比設(shè)置為2.2、6.8以及2.5~6.5(間隔步長(zhǎng)0.5),共計(jì)11種傳動(dòng)比方案,如圖5所示。
3.2 仿真結(jié)果
3.2.1動(dòng)力性仿真結(jié)果
在軟件中,對(duì)上述11種方案分別進(jìn)行最高車速、滿負(fù)荷加速(0~100 km/h、40~80 km/h)、最大爬坡4項(xiàng)計(jì)算任務(wù)。
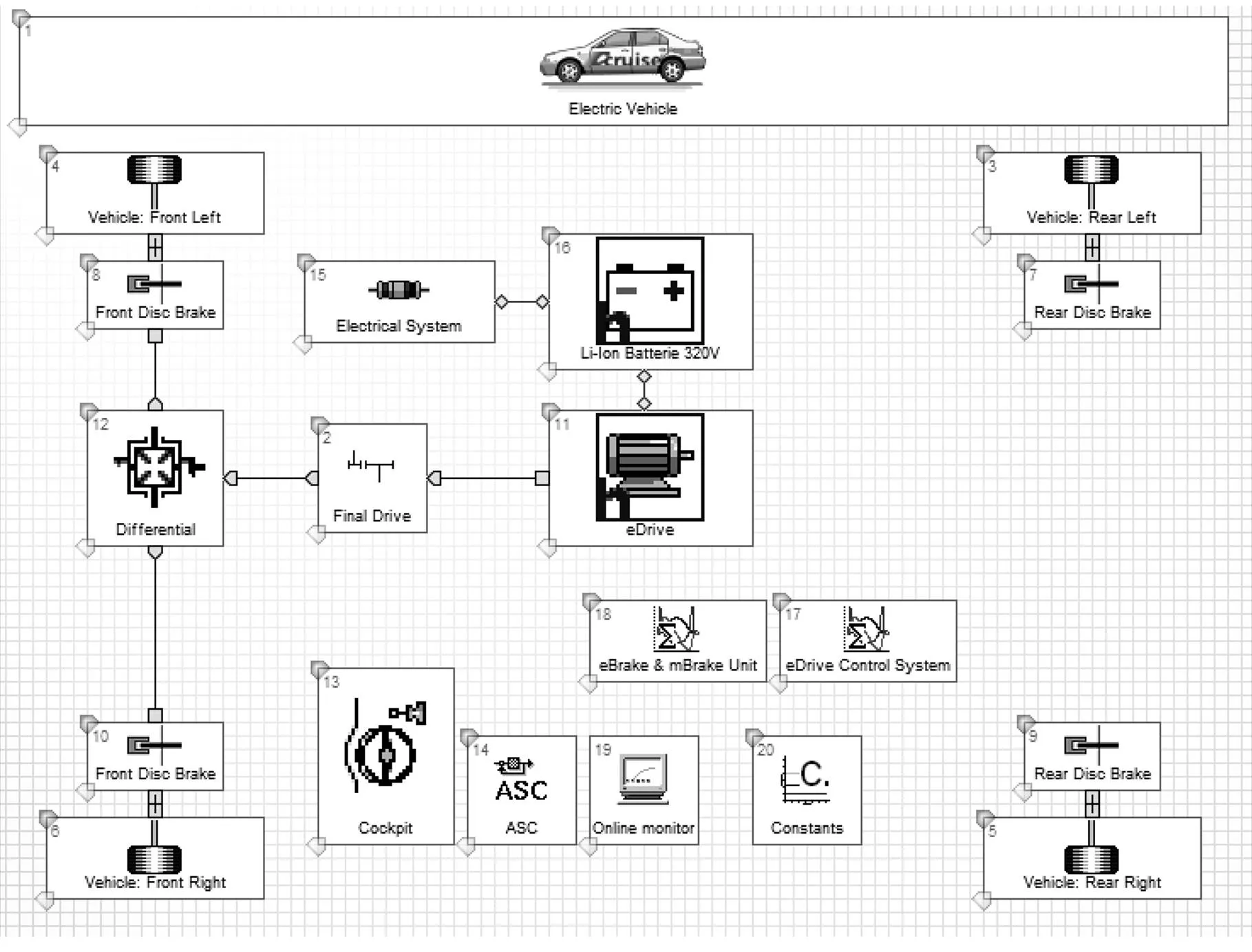
圖2 電動(dòng)輪驅(qū)動(dòng)方案模型
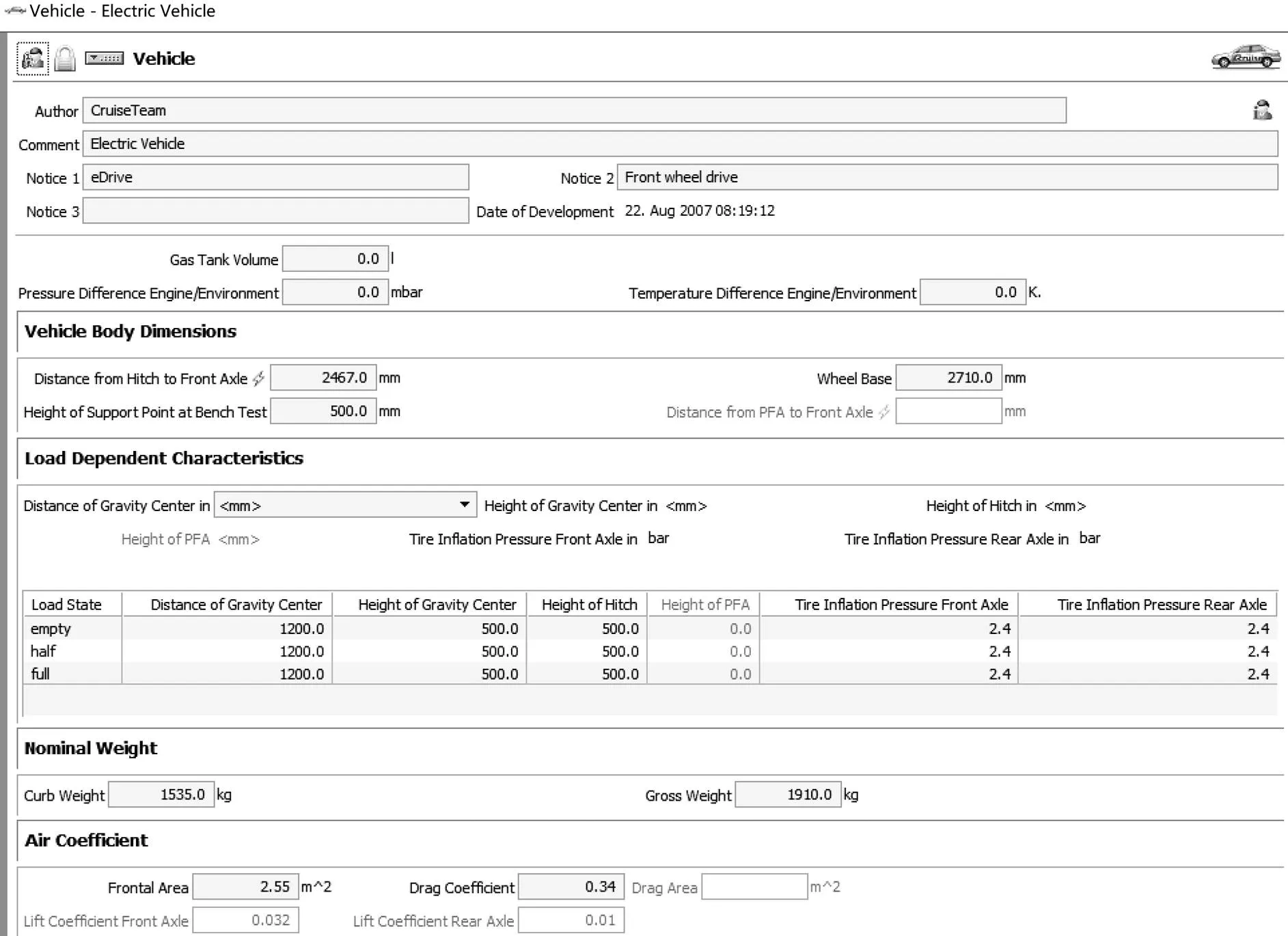
圖3 整車參數(shù)設(shè)置
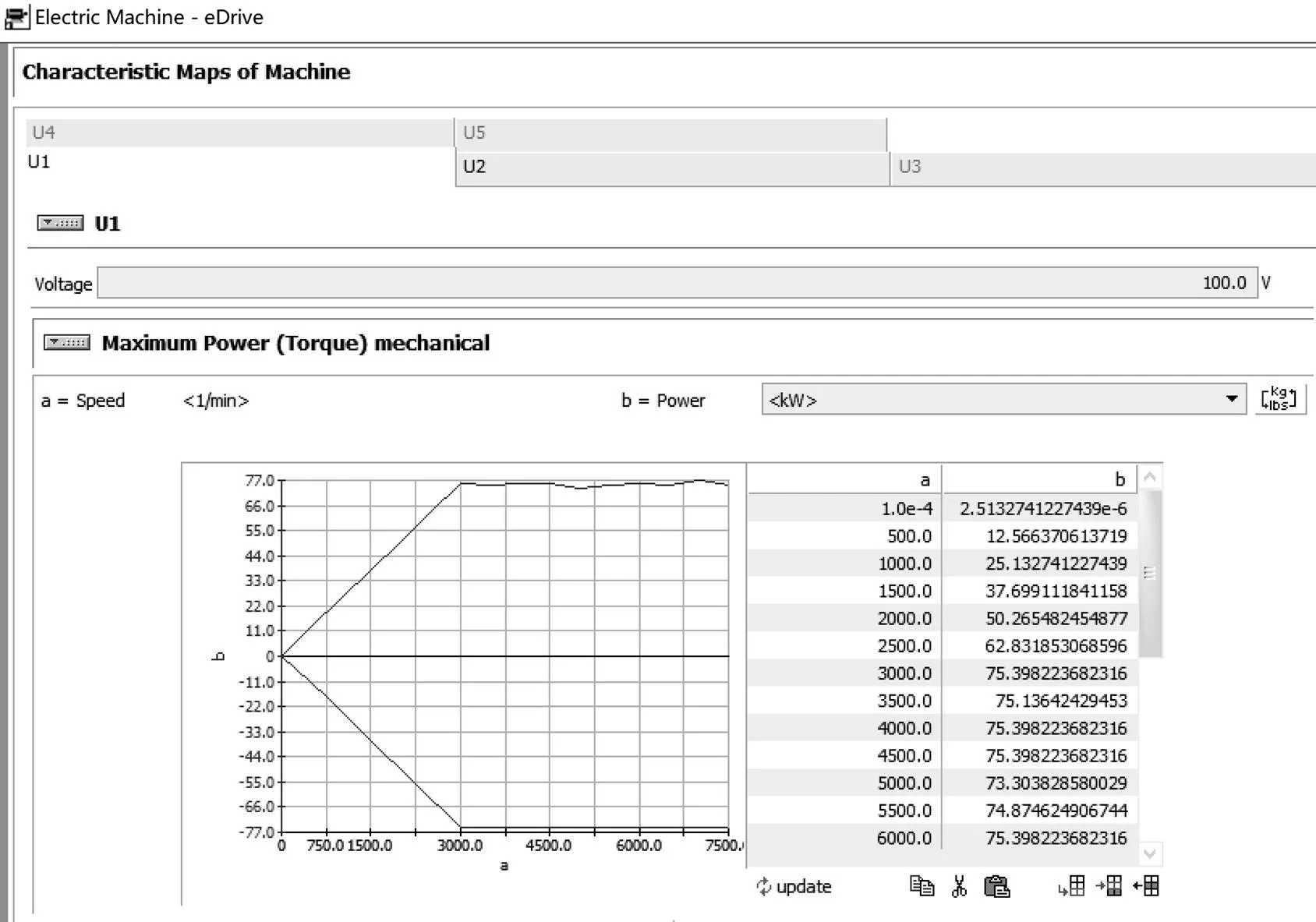
圖4 電機(jī)參數(shù)設(shè)置

圖5 主減速器傳動(dòng)比參數(shù)設(shè)置
結(jié)果如表1所示。傳動(dòng)比2.2、2.5、3、3.5、4等五個(gè)方案,主要?jiǎng)恿π灾笜?biāo)均遠(yuǎn)未達(dá)到設(shè)計(jì)要求。傳動(dòng)比4.5、5、5.5、6、6.5、6.8等六個(gè)方案,0~100 km/h加速能力、40~80 km/h加速能力、爬坡能力伴隨著傳動(dòng)比的增大而增加,但最高車速與傳動(dòng)比之間未形成線性關(guān)系。
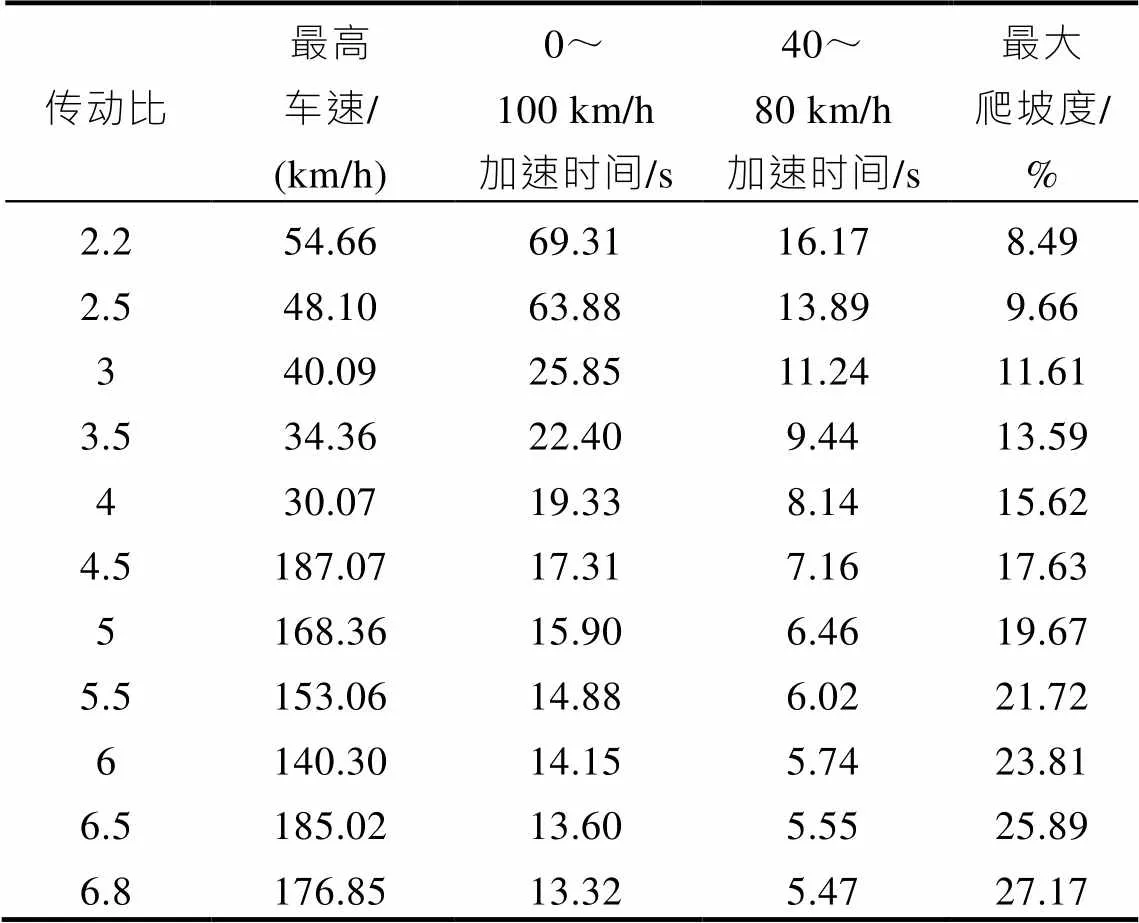
表1 動(dòng)力性仿真結(jié)果
3.2.2經(jīng)濟(jì)性仿真結(jié)果
將經(jīng)濟(jì)性仿真的行駛工況設(shè)定為CLTC-P工況,實(shí)際行駛情況如圖6所示。
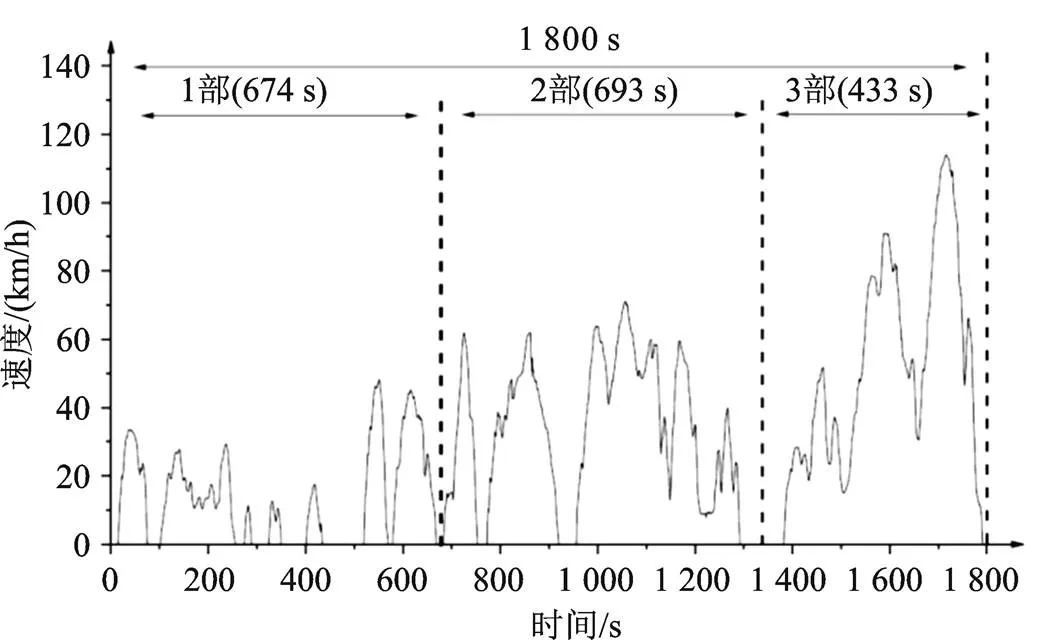
圖6 CLTC-P工況情況
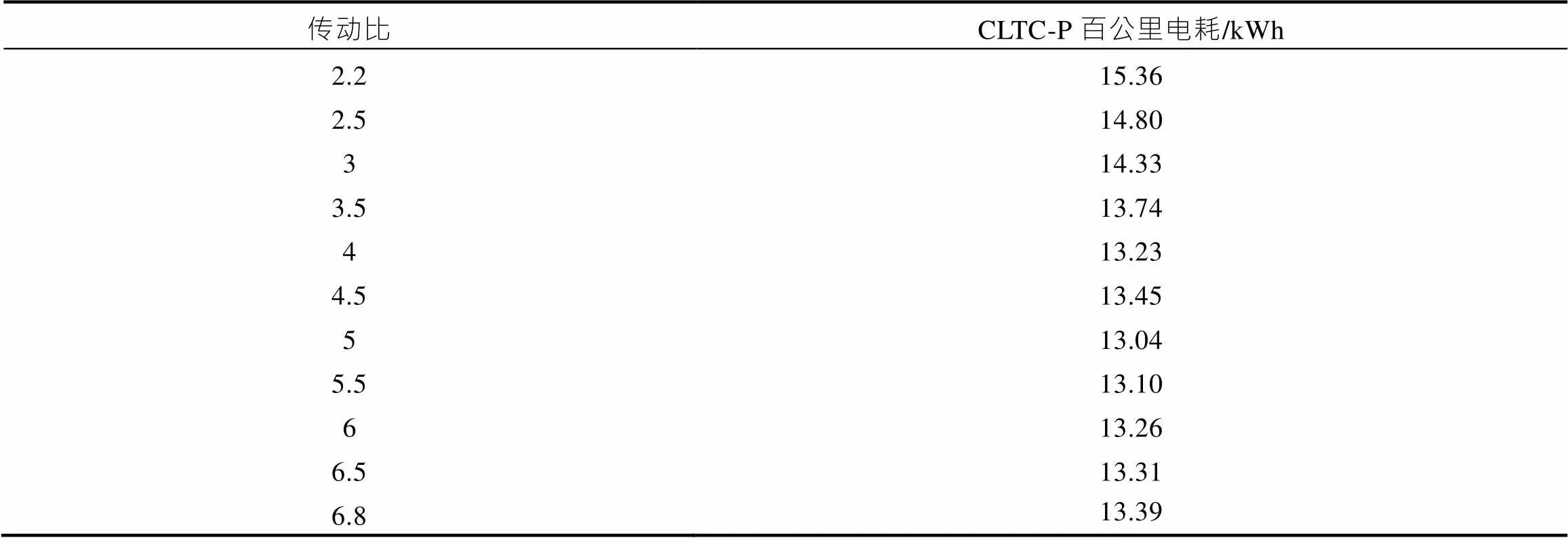
表2 經(jīng)濟(jì)性仿真結(jié)果
傳動(dòng)比在2.2至4的區(qū)間內(nèi),百公里電耗隨著傳動(dòng)比的增大而減少;當(dāng)傳動(dòng)比在5至6.8的區(qū)間內(nèi),百公里電耗隨著傳動(dòng)比的增大而增大,如表2所示。
4 確定優(yōu)化傳動(dòng)比
經(jīng)動(dòng)力性分析,按照整車最高車速≥160 km/h,最大爬坡度≥20%,0~100 km/h加速時(shí)間<15 s的設(shè)計(jì)要求,因傳動(dòng)比2.2、2.5、3、3.5、4等五個(gè)方案的三項(xiàng)動(dòng)力性指標(biāo)均遠(yuǎn)未達(dá)到要求,故將該五個(gè)方案予以排除。
傳動(dòng)比4.5、5等兩個(gè)方案雖在最高車速方面滿足要求,但在加速與爬坡性能方面不能達(dá)到要求,傳動(dòng)比5.5、6等兩個(gè)方案最高車速不能滿足要求,均予以排除。
傳動(dòng)比6.5相較于傳動(dòng)比6.8,在加速、爬坡性能方面雖略有不足,但最高車速和經(jīng)濟(jì)性更優(yōu),且考慮到整車布置,確定最終優(yōu)化傳動(dòng)比為6.5[4]。如表3所示。

表3 經(jīng)濟(jì)性仿真結(jié)果
5 結(jié)論
選用傳動(dòng)比6.5對(duì)車輛進(jìn)行仿真,結(jié)果表明,該車整備質(zhì)量1 535 kg,最高車速達(dá)185 km/h(如圖7所示)、最大爬坡度25.9%(如圖8所示)、0~100 km/h加速時(shí)間13.6 s、CLTC-P百公里電耗13.31 kWh。

圖7 傳動(dòng)比6.5情況下的最高車速
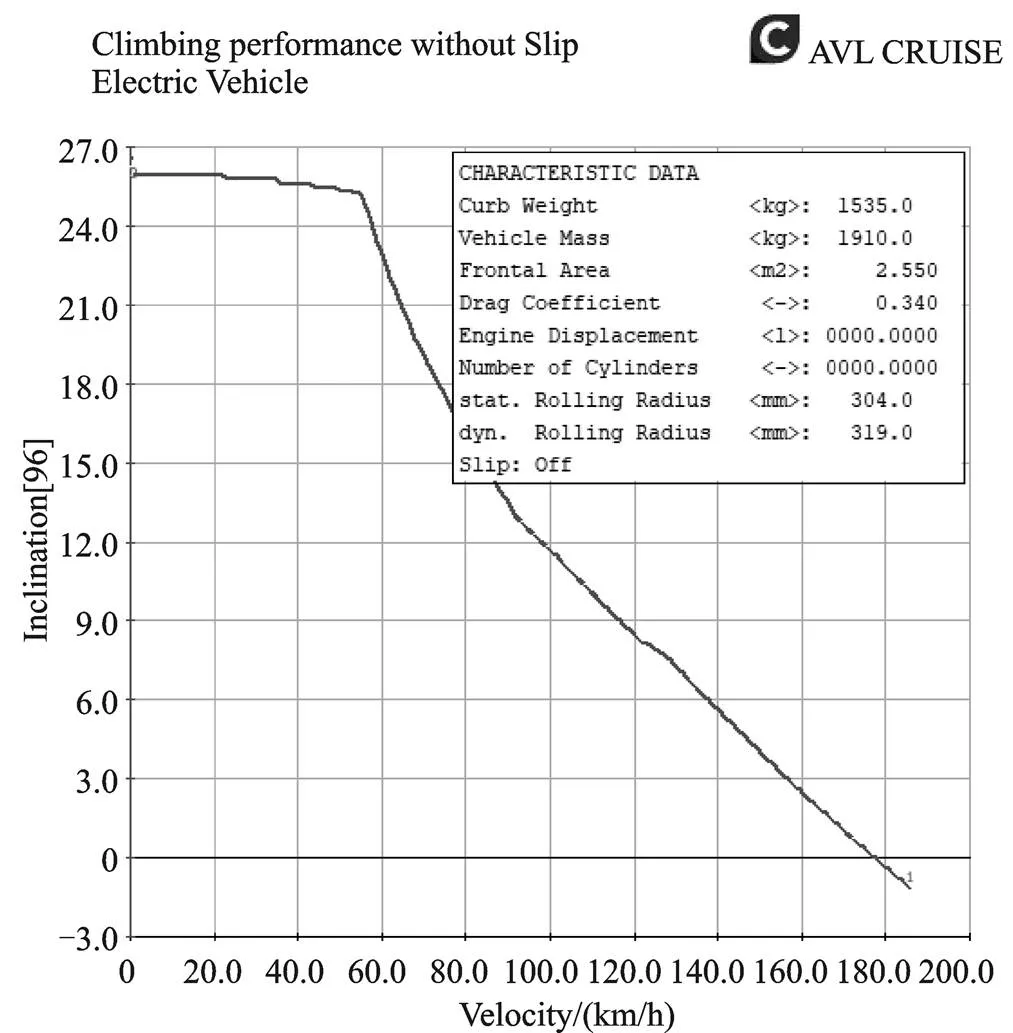
圖8 傳動(dòng)比6.5情況下的爬坡能力
如表4所示,所選用的動(dòng)力系統(tǒng)方案滿足設(shè)計(jì)要求,且傳動(dòng)比方案具有較好的經(jīng)濟(jì)性[5]。
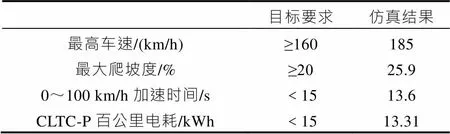
表4 最終仿真結(jié)果
本文針對(duì)某純電動(dòng)汽車的動(dòng)力系統(tǒng)進(jìn)行匹配設(shè)計(jì),最后通過AVL Cruise軟件對(duì)車輛的性能進(jìn)行仿真[6],進(jìn)一步對(duì)仿真數(shù)據(jù)進(jìn)行分析,并確定了優(yōu)化傳動(dòng)比,經(jīng)分析,該純電動(dòng)汽車具備了較好的動(dòng)力性、經(jīng)濟(jì)性。
[1] 張凱旋,周志康,胡宸瑋,等.電動(dòng)汽車減速器性能優(yōu)化與結(jié)構(gòu)設(shè)計(jì)[J].工程與試驗(yàn),2020(2):24-27,75.
[2] 徐展.基于AVL CRUISE的某純電動(dòng)汽車驅(qū)動(dòng)方案分析及參數(shù)匹配[J].汽車實(shí)用技術(shù),2019,44(5):41-45.
[3] 趙華慧,黃兆飛,楊鎮(zhèn)瑜.四輪獨(dú)立驅(qū)動(dòng)電動(dòng)汽車性能仿真方法研究[J].時(shí)代汽車,2019(12): 64-65.
[4] 呂晨陽(yáng).插電式混合動(dòng)力汽車控制策略研究與仿真分析[D].武漢:武漢理工大學(xué),2019.
[5] 安洪雨.純電動(dòng)汽車動(dòng)力系統(tǒng)參數(shù)匹配選擇及計(jì)算仿真[J].內(nèi)燃機(jī)與配件,2019(21): 19-22.
[6] 李魁.基于Cruise和Simulink分布式驅(qū)動(dòng)的純電動(dòng)汽車仿真[D].十堰:湖北汽車工業(yè)學(xué)院,2019.
Matching Design of a Pure Electric Vehicle Power System Based on AVL Cruise
MIAO Mingya
( Modern Manufacturing Department, Jiangsu Wujiang Secondary Specialized School, Suzhou 215299, China )
The matching of the pure electric vehicle power system is the key in the development process of electric vehicles. The matching design of the power system of a pure electric vehicle is carried out. According to the design requirements, the parameters of the driving motor, driving scheme, transmission ratio, etc are matched. AVL Cruise software is used to model and simulate the whole vehicle, analyze the simulation results, and further determine the optimal transmission ratio scheme. The results show that the selected power system scheme meets the design requirements, and the transmission ratio scheme has better power performance and economy.
AVL Cruise; Pure electric vehicle; Power system;System matching
U469.72
A
1671-7988(2022)23-109-05
U469.72
A
1671-7988(2022)23-109-05
10.16638/j.cnki.1671-7988.2022.023.020
繆明雅(1985—),女,講師,研究方向?yàn)槠囘\(yùn)用技術(shù),E-mail:113014768@qq.com。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
能源工程(2021年6期)2022-01-06 02:04:36
汽車工程師(2021年11期)2021-12-21 06:23:12
建材發(fā)展導(dǎo)向(2021年15期)2021-11-05 08:21:08
建材發(fā)展導(dǎo)向(2021年15期)2021-11-05 08:21:04
中國(guó)資源綜合利用(2016年8期)2016-01-22 07:29:29
四川電力技術(shù)(2015年5期)2015-12-19 11:04:54
減速頂與調(diào)速技術(shù)(2015年4期)2015-03-16 03:39:41
中國(guó)工程咨詢(2015年2期)2015-02-14 02:59:22
