駕駛模擬器轉向路感實現方法
2022-12-29 07:42:34黃騰,何通
汽車實用技術 2022年23期
黃 騰,何 通
駕駛模擬器轉向路感實現方法
黃 騰,何 通
(長安大學 汽車學院,陜西 西安 710064)
針對駕駛模擬器轉向系統相對實車缺乏路感反饋這一問題,設計了一種基于NARX神經網絡的路感模型,實現了轉向系統摩擦動態特性描述和路感模擬。首先基于dSPACE和Carsim搭建駕駛員在環數據采集平臺,實現駕駛模擬器控制器局域網(CAN)通信配置。采集真實駕駛員實時數據,并對原始數據進行濾波處理,完成NARX路感模型構建。最后對路感模型進行Simulink/Carsim聯合仿真試驗。試驗結果表明,該路感模型可以有效實現路感模擬功能。
駕駛模擬器;路感模擬;CAN通信;NARX神經網絡
隨著現代科技高速發展,研發人員對自動駕駛輔助系統(Advanced Driver Assistance System, ADAS)提出了更高的技術要求。為了解決ADAS實車研發成本高、周期長等問題,現在研發人員將駕駛模擬器與仿真軟件相結合進行半實物虛擬試驗開發[1]。
路感模擬是影響駕駛模擬器使用效果的一個關鍵因素。目前國內外路感模擬研究方法主要分為兩類,一類是基于路感形成機理對轉向系統動力學建模以計算路感[2-3],另一類主要是通過行駛數據進行曲線擬合、神經網絡等實現路感模擬[4-5]。第一類方法存在動力學模型復雜度和精度的矛盾,本文采取神經網絡搭建路感模型,以實現路感的精準模擬,使得駕駛員在試驗過程中可以獲得真車行駛感覺。
1 駕駛員在環數據采集平臺搭建
訓練神經網絡模型需要大量行駛數據作為基礎。而車輛行駛場景復雜多變,實車采集效率低下,且部分轉向工況在實車行駛下對駕駛員會造成潛在危險。因此,本文基于dSPACE和Carsim搭建實時數據采集平臺,平臺總體框架如圖1所示。
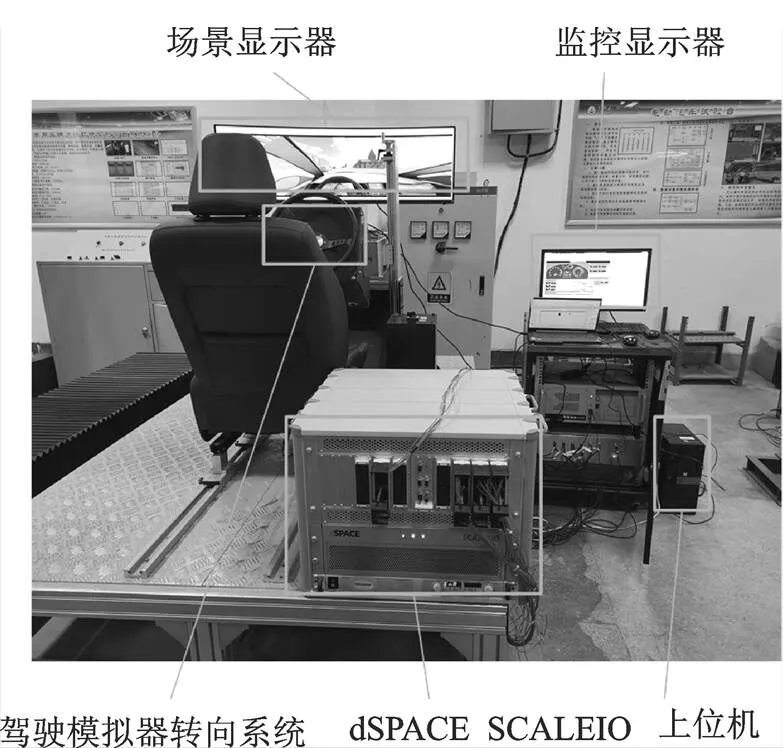
圖1 駕駛員在環數據采集平臺實物圖
該平臺主要由dSPACE、上位機、數據采集設備、駕駛模擬器等硬件以及Carsim、Simulink等軟件組成。其工作流程:dSPACE實時運行Carsim模型;駕駛員根據場景顯示器的實時畫面進行駕駛操作;方向盤轉角等數據通過數據采集設備以控制器局域網(Controller Area Network, CAN)通信發送回dSPACE,并對車輛狀態進行實時求解。
1.1 Carsim配置
在Carsim中搭建整車動力學模型,設置試驗場景以及輸入輸出接口信號。輸入信號是方向盤轉角等駕駛員操縱數據,輸出信號是路感模型所需車輛狀態,具體如表1所示。
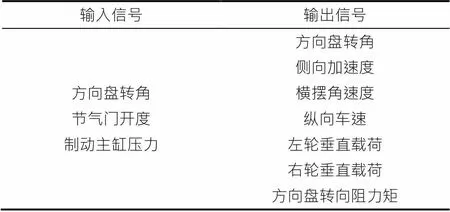
表1 Carsim輸入信號與輸出信號
1.2 CAN通信配置
為實現dSPACE與外部環境通信,需完成CAN通信模型搭建,如圖2所示,在Simulink中通過RTICANMM庫搭建,Controler Setup模塊中CAN通信波特率設置為500 kb/s。MainBlock模塊中導入駕駛模擬器DBC文件,選擇所需的報文和信號,實現Carsim模型輸入輸出信號與CAN信號的Mapping,并最終通過dSPACE軟件編譯生成sdf文件。
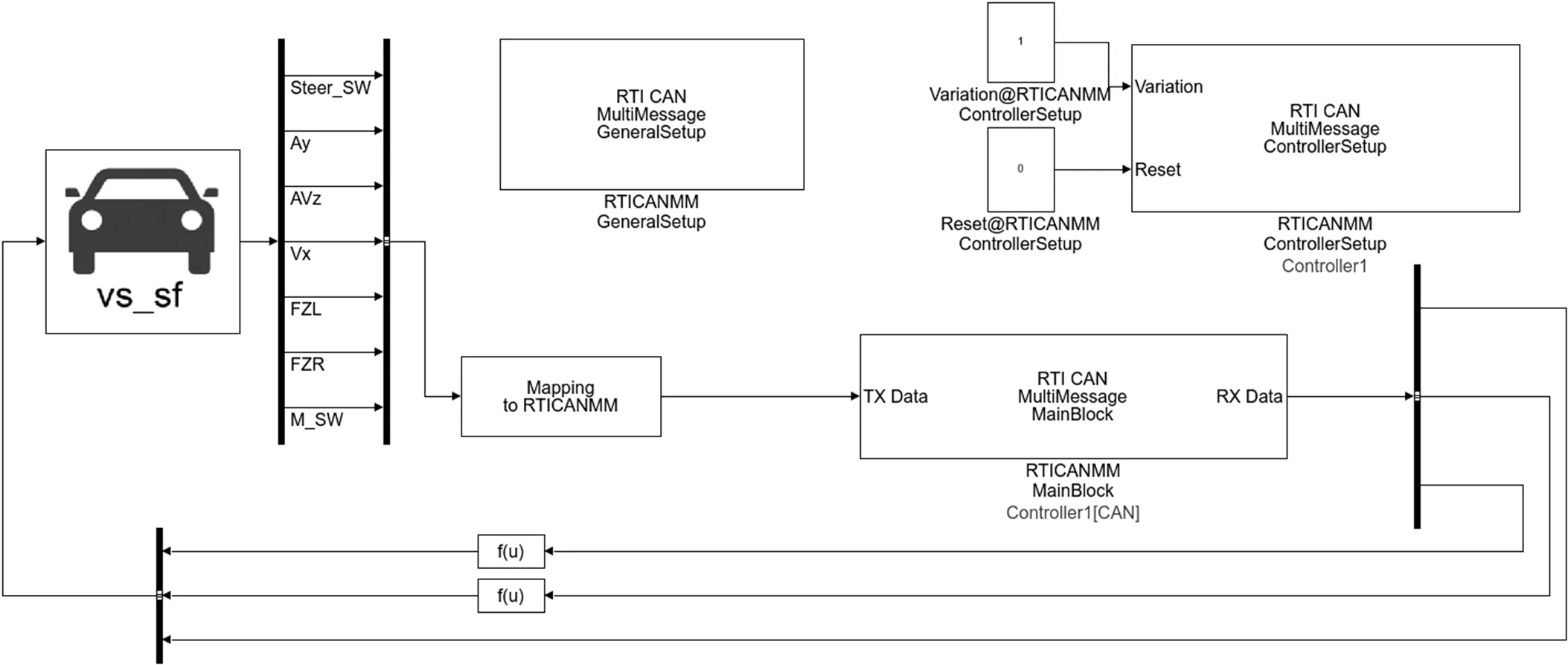
圖2 CAN通信模型
2 基于NARX的路感模型建立
2.1 路感數據采集
基于上述駕駛員在環試驗平臺進行真實駕駛員在環數據采集,以滿足神經網絡訓練要求。采集數據為車輛縱向與側向車速、縱向與側向加速度、橫擺角速度、方向盤轉角與轉速[6]。
主要轉向工況如表2所示,每個轉向工況均進行四組采集試驗,采樣頻率為40 Hz。在路面附著系數為0.85、0.5、0.2下各進行一輪采集。
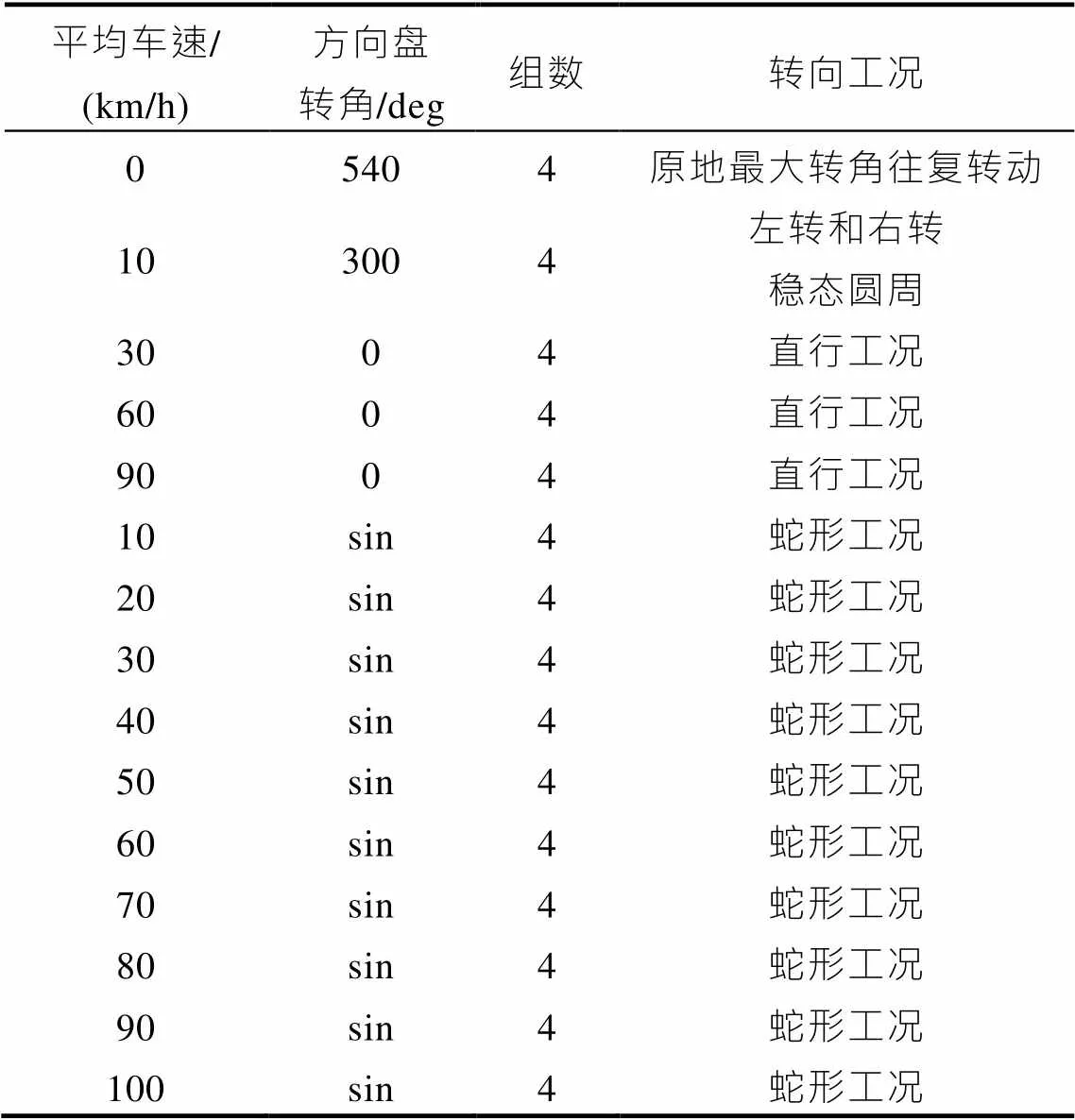
表2 轉向工況采集表
2.2 數據處理
在駕駛員在環采集的路感影響因素數據中存在高頻噪聲及脈沖干擾噪聲。為了提高路感模型的精準度,需對其進行濾波處理。對原始數據同時進行限幅濾波與均值濾波以剔除不合格數據。
限幅濾波具有消除高幅度脈沖干擾噪聲功能,其工作原理為當前時刻信號值與上一時刻信號值之差絕對值若小于預設閾值,則當前信號有效;否則,則使用上一時刻信號代替當前時刻信號。限幅濾波數學表達式為
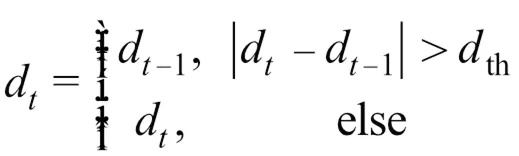
式中,d為時刻的信號值;th為信號閾值。
均值濾波是一種使用廣泛的濾波算法,具有消除高頻噪聲的功能。其原理是取個采樣值的平均值,特點是當較大時,濾波后的曲線會更加平滑,但靈敏度差;當較小時,濾波效果會更差,但有更高的靈敏度。均值濾波數學表達式為
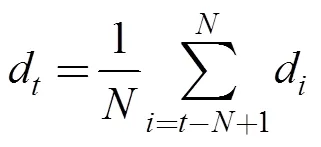
式中,為樣本采樣個數,本文取=10。
濾波總流程:首先讀取數據,判斷當前時刻數據與上一時刻數據之差|d-d-1|是否大于預設閾值th,若是,則令d= d-1,否則,不做任何處理。接著,判斷數據個數是否小于,若<,則表明還無法進行均值濾波;當≥時,進行均值濾波。然后,數據計數器自加1,判斷數據計數器是否小于數據總數,若<,則進入下一數據的濾波流程;當≥時,則表明濾波結束。
2.3 路感模型建立
實際行駛過程中由于轉向系統內部摩擦和路面輪胎間摩擦的滯后效應[7],路感會受到歷史信息影響,因此,選用NARX動態神經網絡建立路感模型,其具有延時和輸出反饋機制,能很好地描述路感動態特性。NARX神經網絡主要包括輸入層、隱含層和輸出層及輸入輸出延時,可表示為
()=((-u),,(),(-y),,(-1)) (3)
式中,u和y分別為輸入輸出時延;()和()分別為時刻網絡輸出和輸入;為前饋神經網絡。
路感模型需燒錄至電機控制單元(Motor Control Unit, MCU),故NARX動態神經網絡的輸入輸出階數選擇為2,減小MCU內存負荷。同時為分析隱含層節點數對網絡性能影響,同時構建3個單隱含層神經網絡路感模型,其隱含層節點數分別為16、8、4,并對每個結構分別進行5次訓練以排除節點初始權重影響,訓練結果如圖3所示。
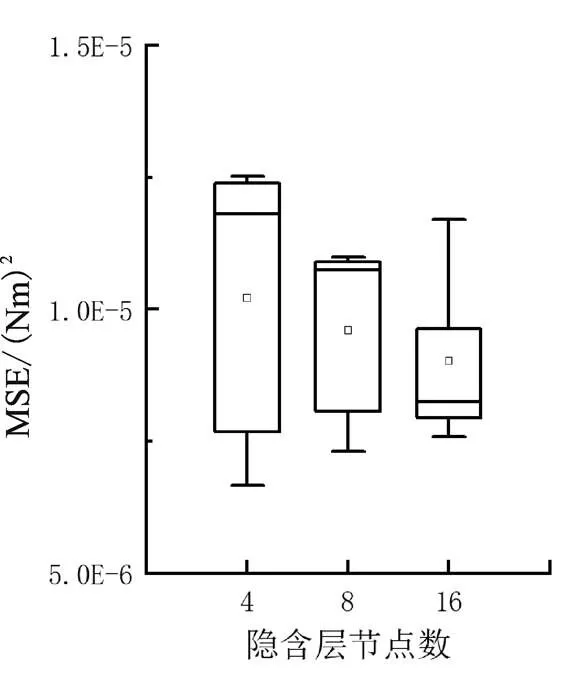
圖3 訓練結果
單隱含層NARX路感模型的訓練均方誤差隨隱含層節點個數的增加而減少,且16節點數網絡性能明顯占優。同時考慮到過多的神經元節點會增加控制器內存的需求,故確定隱含層節點數為16。
3 仿真與驗證
在Simulink中搭建路感模型,通過Matlab庫函數gensim()生成NARX神經網絡Simulink模塊,仿真模型整體結構如圖4所示。
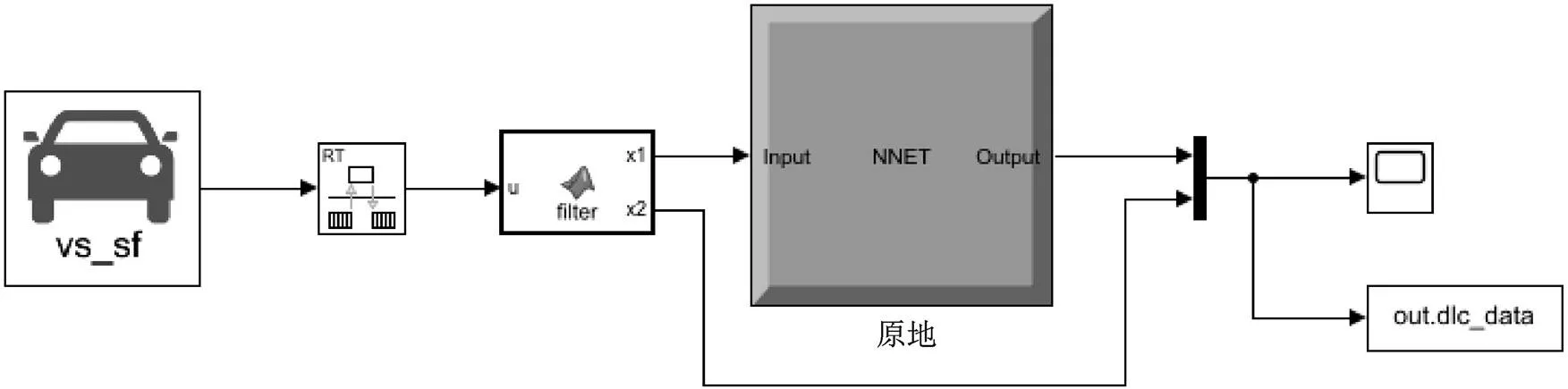
圖4 路感模型結構圖
整車模型參數如表3所示。

表3 車輛參數表
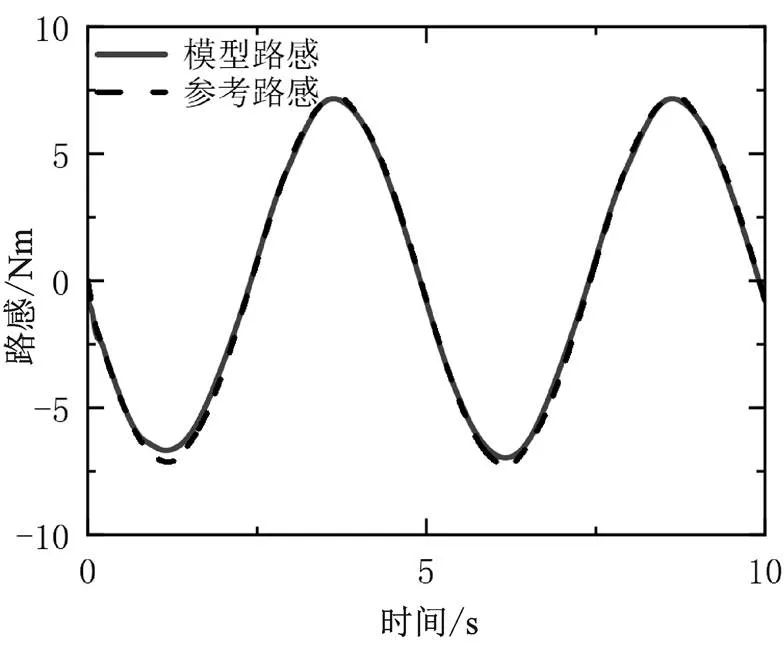
蛇形仿真試驗:車速為54 km/h,路面附著系數分別為0.7、0.3。仿真結果如圖5、圖6所示。
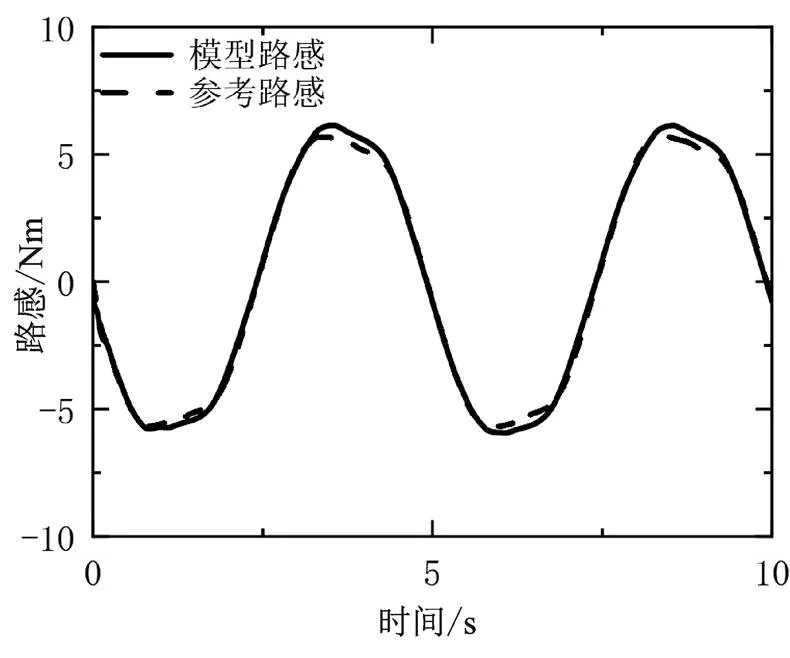
從路感誤差曲線可得,NARX路感模型在各路面附著系數下均有較好的路感預測能力,路感變化趨勢基本一致。低附著路面下輪胎處于非線性工作區導致模型預測誤差略高于高附著路面。
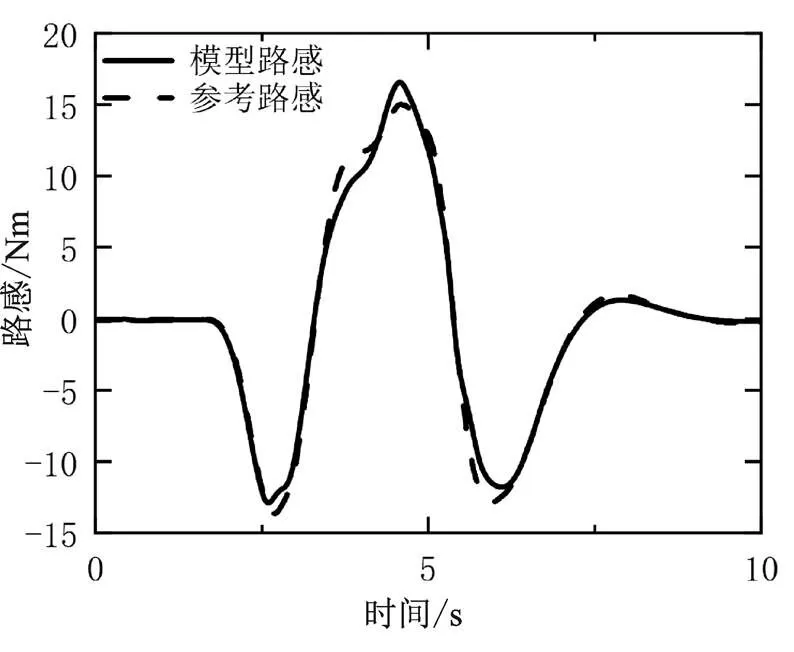
雙移線仿真試驗:車速為90 km/h,路面附著系數0.9。仿真結果如圖7所示。
試驗車速和路面附著條件均在訓練樣本外,從圖中可以看出基于NARX神經網絡的路感模型在高速條件下仍具有不錯的預測能力。
4 結論
本文針對摩擦動態特性具有的滯回特性和非局部記憶效應,設計一種基于NARX神經網絡的路感模型。通過仿真試驗表明,模型具有較好的路感預測能力,對于車速和路面附著條件有較好的適應能力,同時對數據集工況外的轉向工況有較好的泛化能力。綜上所述,本文設計的路感模型可以滿足駕駛模擬器路感設計需求。
[1] 石晶,許廣吉.ADAS實驗平臺轉向路感模擬的實現[J].機械設計與制造,2022(5):29-32.
[2] 趙含雪,李芳,吳艷,等.線控轉向系統路感模擬與主動回正控制[J].電工電能新技術,2020,39(4):64-72.
[3] 張博,鄭良劍,牛占占.一種新型線控轉向路感模擬器的設計[J].時代汽車,2020(13):95-96.
[4] ZHANG H, WANG Y, ZHANG G, et al. Research on LADRC Strategy of PMSM for Road-sensing Simula- tion Based on Differential Evolution Algorithm[J]. Journal of Power Electronics,2020,20(4):958-970.
[5] HEINRICH F,KASTE J,KABIL S G,et al.Methods for Modeling the Steering Wheel Torque of a Steer-by- wire Vehicle[J].Automotive and Engine Technology, 2022,7(1):53-64.
[6] 武鵬云.駕駛模擬器轉向系統設計[D].西安:長安大學,2021.
[7] STEFA?SKI A,WOJEWODA J,FURMANIK K.Ex- perimental and Numerical Analysis of Self-excited Friction Oscillator[J].Chaos,Solitons & Fractals,2001, 12(9):1691-1704.
Realization Method of Steering Road Sense in Driving Simulator
HUANG Teng, HE Tong
( Automobile College, Chang'an University, Xi’an 710064, China )
Aiming at the problem that the steering system of the driving simulator lacks road sense feedback compared with the real vehicle, this paper designs a road sense model based on NARX neural network, and realizes the description of the friction dynamic characteristics of the steering system and the simulation of road sense.First, a driver in the loop data acquisition platform is built based on dSPACE and Carsim to realize the Controller Area Network(CAN) communication configuration of the driving simulator. Real time data of real drivers are collected, and the original data is filtered to complete the construction of NARX road sense model. Finally, the simulink/carsim joint simulation test is carried out on the road sense model. The test results show that the road sense model can effectively realize the road sense simulation function.
Driving simulator; Road sensing simulation; CAN communication;NARX neural network
U463.4
B
1671-7988(2022)23-118-05
U463.4
B
1671-7988(2022)23-118-05
10.16638/j.cnki.1671-7988.2022.023.022
黃騰(1996—),男,碩士研究生,研究方向為電控轉向,E-mail:2032977496@qq.com。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
