基于Simulink的EV節(jié)能車“加速-滑行”的能耗仿真分析
2023-01-03 10:54:50李永耀岑加俊黃澤豪戴靖陳宇王麗
汽車零部件 2022年12期
李永耀,岑加俊,黃澤豪,戴靖,陳宇,王麗
廣州城市理工學(xué)院,廣東廣州 510800
0 引言
根據(jù)汽車環(huán)保馬拉松大賽競賽規(guī)則[1-2],電動原型車的賽事由各車隊自行配備電池,賽方通過在電池輸出端安裝焦耳計來測定車輛在行駛過程中能量的損耗值,并且比賽單圈有最低平均時速25 km/h的要求,續(xù)航里程長的車輛為節(jié)能競技比賽的優(yōu)勝者。在備賽過程中,EV節(jié)能車結(jié)構(gòu)初步完成后,需要根據(jù)路況和車體運行情況,不斷調(diào)整駕駛策略,讓車輛用更小的電量行駛更遠(yuǎn)的距離[3],以實現(xiàn)較優(yōu)良的能耗性能,并進(jìn)一步實現(xiàn)大賽節(jié)能減排的宗旨和提高環(huán)保意識,同時也提高參賽者的實踐動手能力和解決問題的能力。
本文通過Simulink建立了駕駛策略模型,并結(jié)合行駛道路的坡度信息,以“加速-滑行”的駕駛策略進(jìn)行行駛能耗仿真分析。分析表明節(jié)能車在“加速-滑行”的特定行駛策略下,其平均時速滿足要求,續(xù)航能力較好,所探討的“加速-滑行”的駕駛策略行駛能耗仿真分析對于降低車輛試驗的時間成本和經(jīng)濟(jì)成本產(chǎn)生影響。
1 基于Simulink的EV節(jié)能車能耗仿真總體框架
EV節(jié)能車整車結(jié)構(gòu)由外殼、車架及電動機(jī)三大部分組成[4-6],搭建的EV節(jié)能車能耗仿真系統(tǒng)由駕駛策略模型、電機(jī)模型、傳動系統(tǒng)模型、車輛縱向動力學(xué)模型、道路模型和結(jié)果查看模型構(gòu)成并進(jìn)行有機(jī)關(guān)聯(lián)。因測試路段長度為3.26 km,在仿真中僅對節(jié)能車進(jìn)行單圈能耗仿真[7-8],因此當(dāng)車輛行程達(dá)到3.26 km,節(jié)能車能耗仿真停止運行。Simulink仿真模型總體框架如圖1所示。
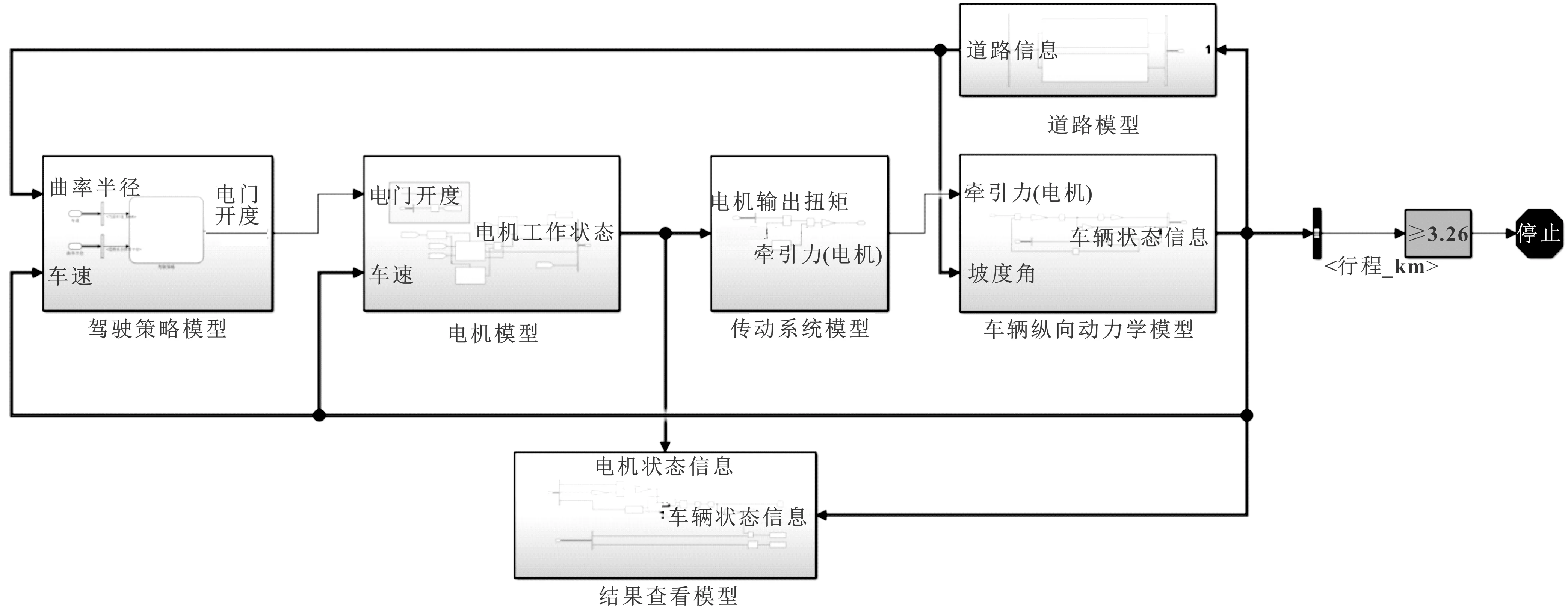
圖1 Simulink仿真模型總體框架
2 駕駛策略模型的建立
由于汽車環(huán)保馬拉松大賽賽場存在坡度和彎道,且有最低電量輸出和平均時速25 km/h的要求。因此,要實現(xiàn)以上基本目標(biāo),車手在無緊急情況下不采取車輛制動,這就要求車手必須具備豐富的賽事經(jīng)驗。通常做法是:EV節(jié)能車通過先加速到某一時速,然后斷電讓車輛滑行,當(dāng)車輛滑行降到特定時速后,再進(jìn)行加速,以此“加速-滑行”往復(fù)進(jìn)行來完成整場比賽。
駕駛策略模型是在Simulink下通過Stateflow來制定的駕駛方式。如圖2建立的駕駛策略模型所示,通過輸入車速信息和彎道曲率信息來決定電門開度,即PWM占空比。
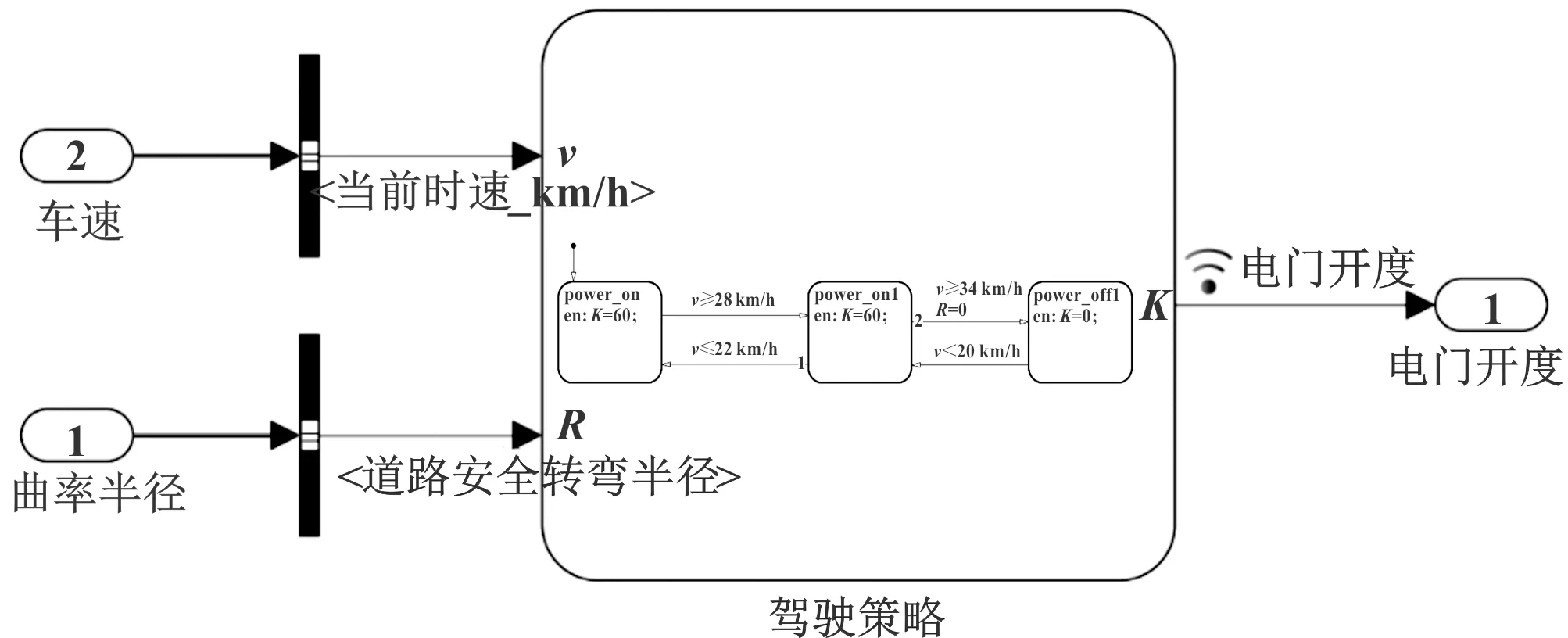
圖2 駕駛策略Simulink模型
圖3為駕駛策略Stateflow模型。該模型是狀態(tài)與動作的執(zhí)行和轉(zhuǎn)換,分別有3種狀態(tài):power_on,power_on1,power_off1;兩種動作:K=60,K=0;兩個條件判斷參數(shù):v和R。考慮到電池放電倍率、電機(jī)輸出扭矩克服道路中最大的坡度阻力等因素,設(shè)置默認(rèn)狀態(tài)(power_on)下,此時執(zhí)行動作是K=60,代表控制電機(jī)的電門旋鈕處于PWM為60%的位置;當(dāng)車速達(dá)到狀態(tài)轉(zhuǎn)移條件(v≥28 km/h)時,狀態(tài)切換至“power_on1”,此時PWM仍是60%;當(dāng)車速v增加到34 km/h時或者車輛行駛在曲率半徑閾值位置時,進(jìn)入狀態(tài)“power_off1”,即PWM為0%;當(dāng)車速低于20 km/h,重新回到狀態(tài)“power_on1”,PWM也回到60%;當(dāng)車速不大于22 km/h,回到默認(rèn)狀態(tài)“power_on”。按照此方式不斷循環(huán)。
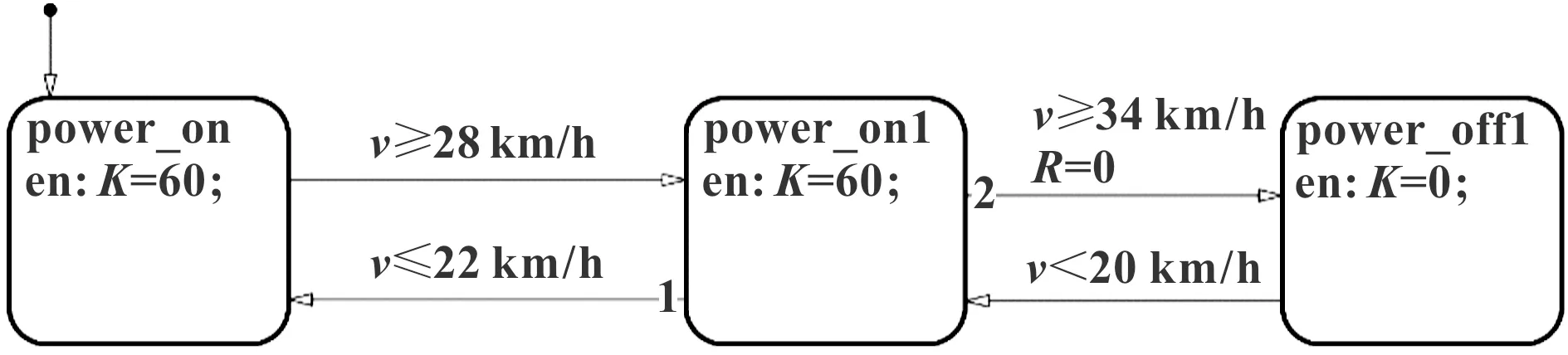
圖3 駕駛策略Stateflow模型
3 道路模型的建立
仿真模型中,對EV節(jié)能賽車行駛在一段環(huán)形的道路進(jìn)行能耗分析。采集道路的經(jīng)度、緯度和海拔高度的一系列連續(xù)離散數(shù)據(jù)點后,通過MATLAB進(jìn)行數(shù)據(jù)預(yù)處理,轉(zhuǎn)化為笛卡爾坐標(biāo)系的數(shù)據(jù)點。通過公式(1)和公式(2)分別進(jìn)行坡度值和曲率半徑進(jìn)行求解。
(1)
(2)
式中:xk、yk、hk分別為該路段第k點在笛卡爾坐標(biāo)系的x軸、y軸、z軸坐標(biāo)的對應(yīng)值;θ為道路與水平地面的夾角;r為道路的曲率半徑。
仿真所用的道路三維形狀如圖4所示,該道路的求解結(jié)果如圖5所示。因車輛在彎道處進(jìn)行加速,設(shè)定r=20 m為曲率半徑閾值。曲率半徑小于r時,該位置給予標(biāo)記R=0,代表此位置禁止啟動電機(jī),否則給予標(biāo)記R=1,表示允許電機(jī)啟動。在Simulink仿真模型中,通過車輛行駛所在的位置來查詢道路信息,如圖6所示。采用一維查表模塊,通過車輛當(dāng)前位置查詢當(dāng)前坡度值。
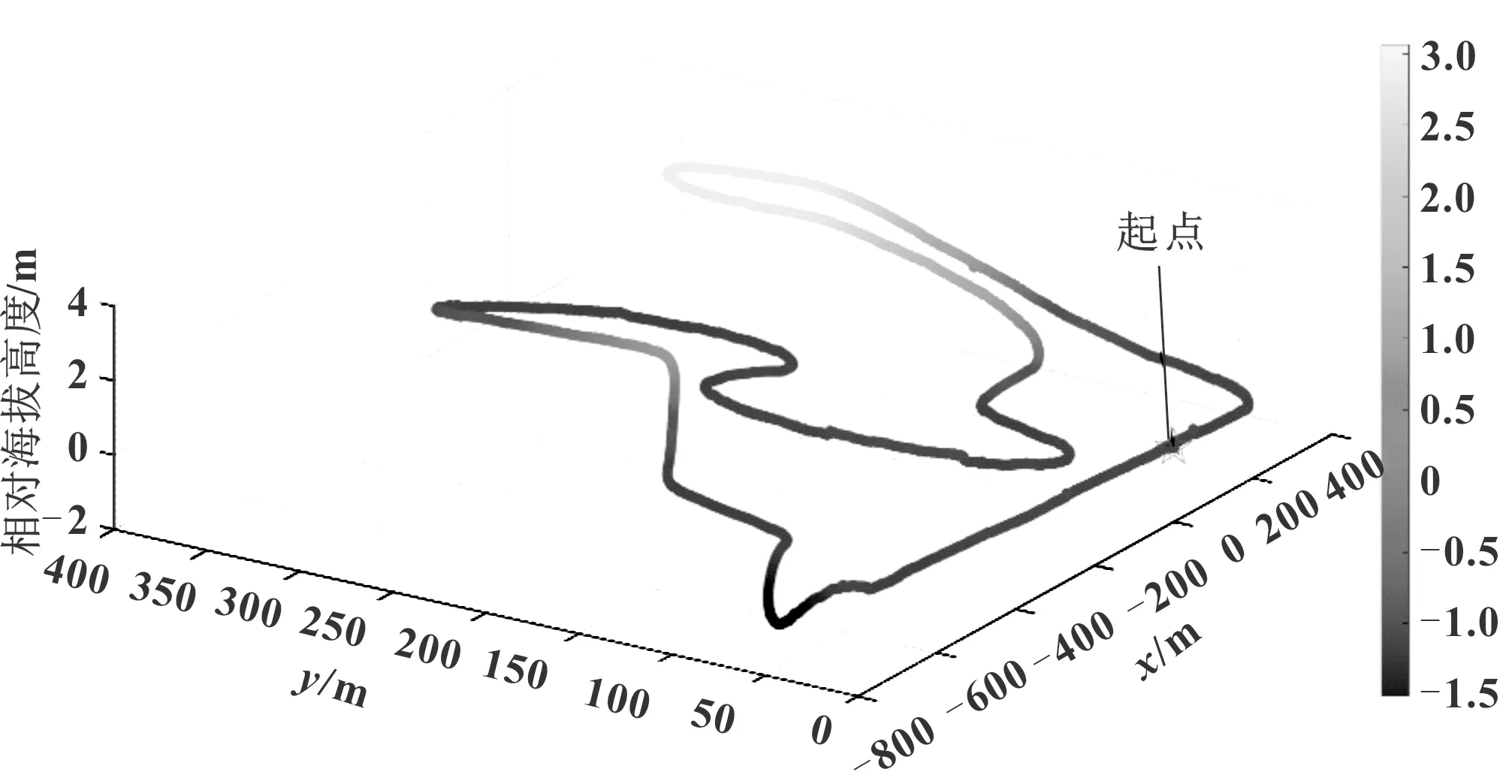
圖4 仿真所用的道路三維形狀
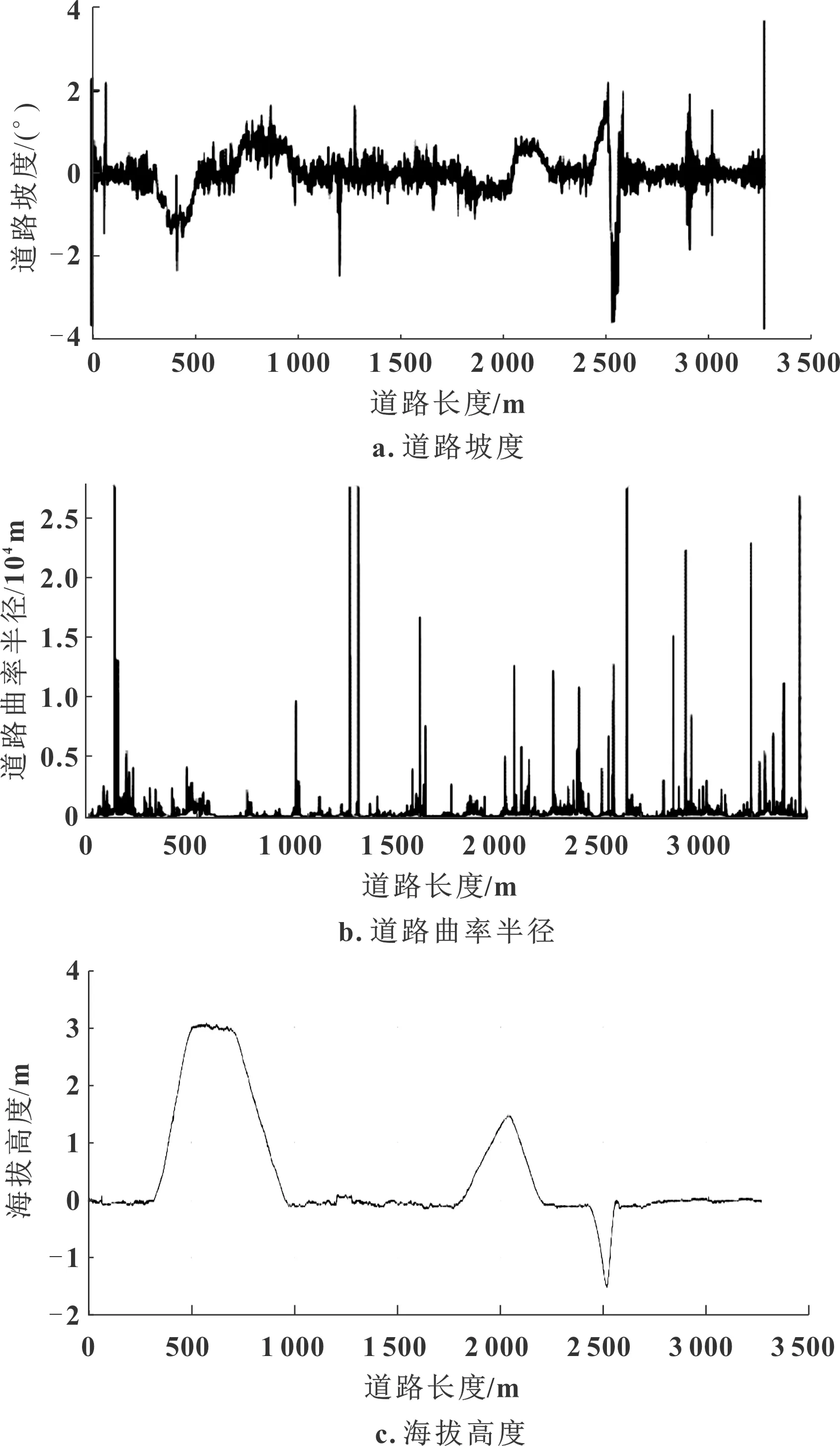
圖5 仿真路段坡度、曲率半徑及海拔高度的變化曲線
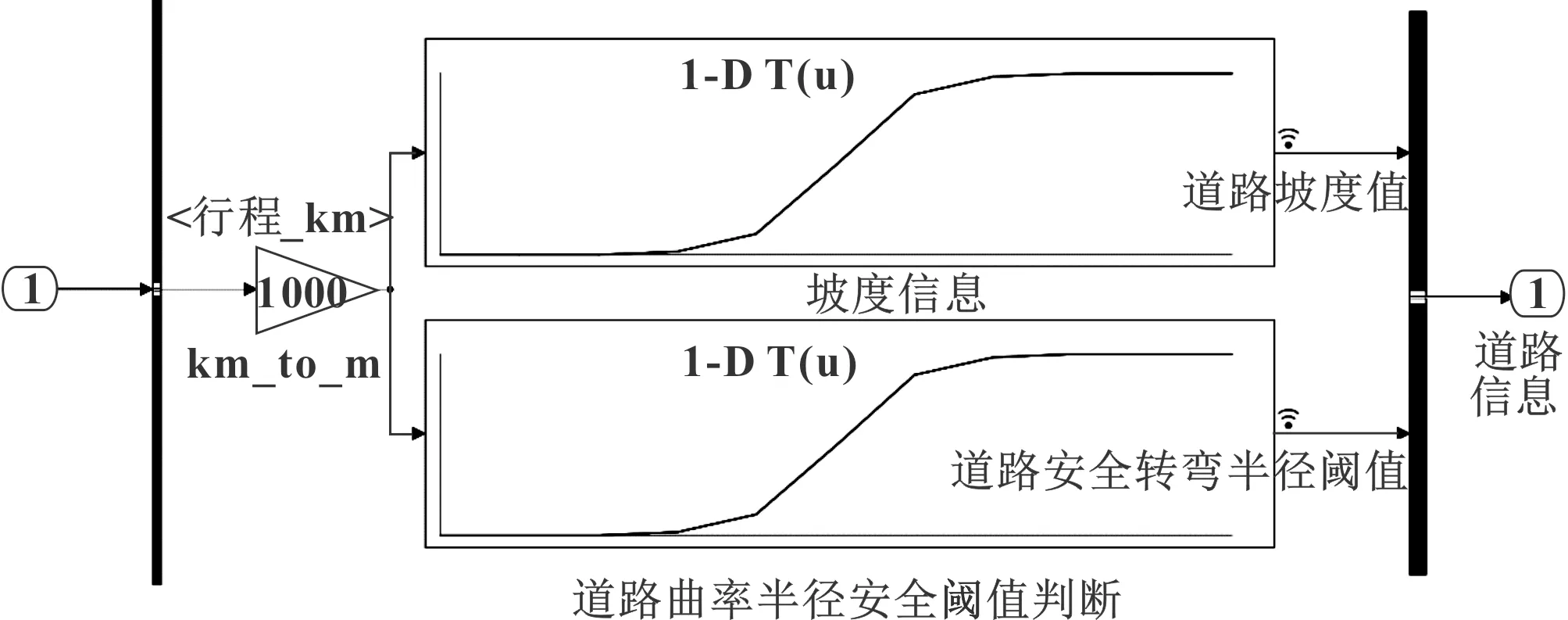
圖6 仿真路段坡度信息模型
4 車輛縱向動力學(xué)模型的建立
以當(dāng)前最新的EV節(jié)能車為載體建立車輛縱向行駛方程為:
(3)

(4)
(5)
式中:η為傳動效率;a為車輛縱向加速度;vk+1為k+1時刻車輛速度值;vk為k時刻車輛速度值;Sk+1為車輛k+1時刻的行程;Sk為車輛k時刻的行程。
EV節(jié)能車的動力學(xué)模型參數(shù)見表1。
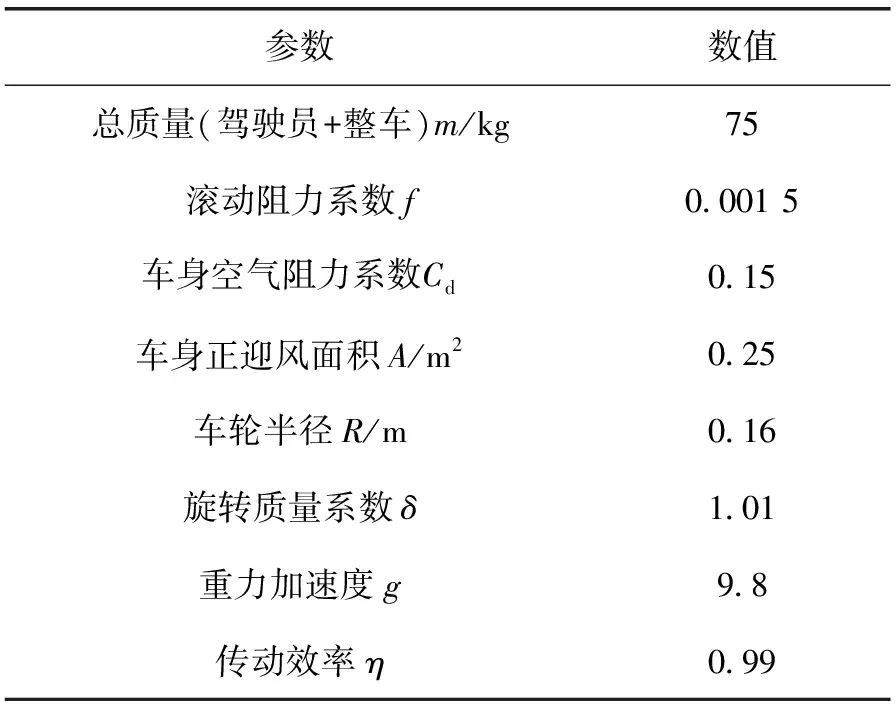
表1 EV節(jié)能車的動力學(xué)模型參數(shù)
在仿真過程中,以加速度a為切入對象,通過車輛當(dāng)前速度、車輛所處位置坡度值和車輛此刻電機(jī)輸出扭矩值動態(tài)信號,對加速度a積分,可求出速度和路程。行駛阻力模型如圖7所示,車輛縱向動力學(xué)模型如圖8所示。
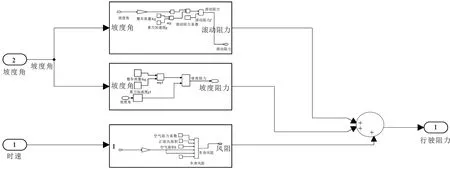
圖7 行駛阻力模型
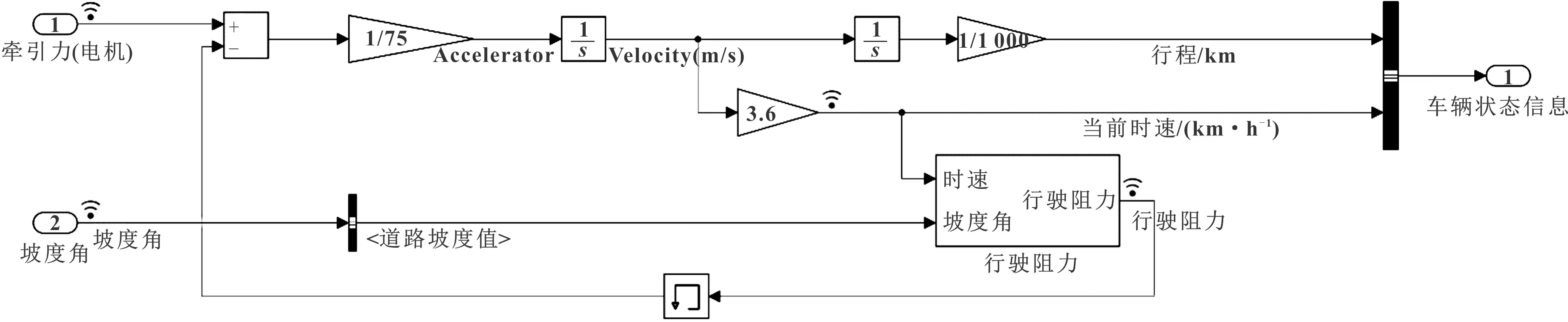
圖8 車輛縱向動力學(xué)模型
5 電機(jī)模型的建立
本文的EV節(jié)能車電動機(jī)模塊采用的是無刷直流電機(jī),在Simulink仿真模型中,電機(jī)效率可以通過查表方式來確定,其效率可以表示為方程(6),電機(jī)的輸出扭矩可以通過方程(7)來確定,電機(jī)輸出功率可以表示為方程(8)。電機(jī)模型如圖9所示。
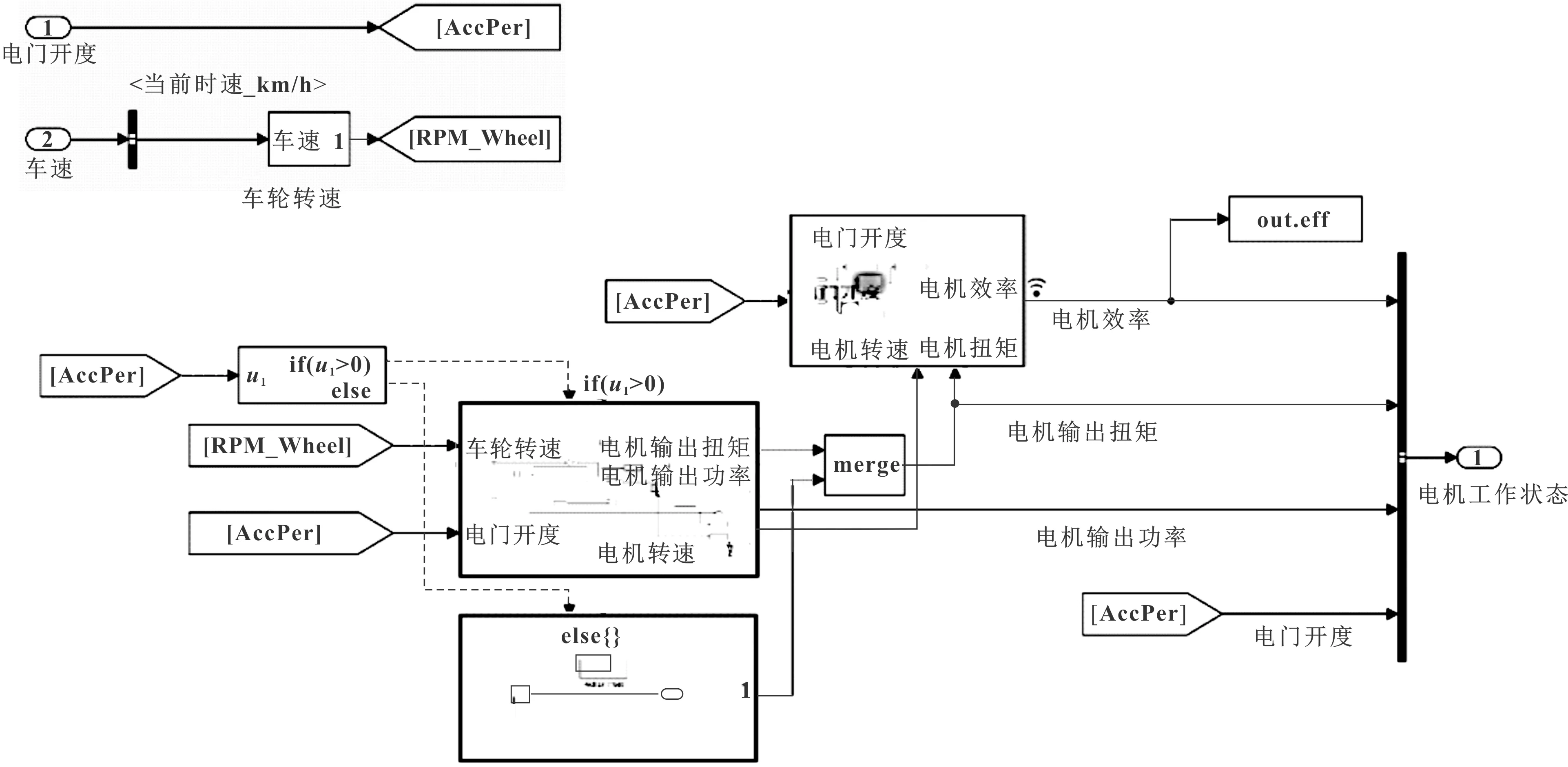
圖9 電機(jī)模型
輸入信號是電門開度和車速,輸出信號有電機(jī)工作效率、電機(jī)輸出扭矩和電機(jī)輸出功率。
ηm=f(Tt,n)
(6)
(7)
(8)
式中:ηm為電機(jī)輸出效率;n為電機(jī)轉(zhuǎn)速;E為電門開度;Pm為電機(jī)輸出功率;N為電機(jī)基速;Tt為電機(jī)實時輸出扭矩。
6 仿真結(jié)果
本文模擬了駕駛員在一段測試道路上以“加速-滑行”的駕駛方式下的能耗損失。但存在一定的理想條件,例如,車輛在轉(zhuǎn)彎過程中能量的損耗假設(shè)為0,賽道的環(huán)境風(fēng)速假設(shè)為0,車手在操控電門轉(zhuǎn)把時能瞬間將轉(zhuǎn)把轉(zhuǎn)到一定的角度。為了提高仿真數(shù)據(jù)的精確度,在Simulink仿真求解器中選擇定步長為0.01來進(jìn)行仿真運算。兩個重要仿真指標(biāo)是:節(jié)能效應(yīng)為874.1 km/kWh,平均時速為27.13 km/h。即在該測試路段下按照上述制定的駕駛策略進(jìn)行駕駛,其節(jié)能指標(biāo)是一度電能行駛874.1 km,而其平均時速為27.1 km/h。
圖10為車速仿真結(jié)果,反映了車手在賽道各位置的車速大小,明顯呈現(xiàn)出“加速-滑行”的駕駛風(fēng)格,平均車速達(dá)到了27 km/h,符合賽事最低平均車速的要求。
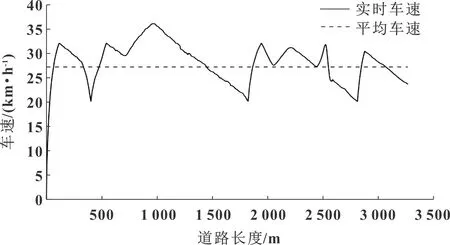
圖10 車速仿真結(jié)果
根據(jù)圖11和圖12的車速曲線與相對海拔高度和電機(jī)輸出功率分布的關(guān)系,可知在整段道路上,不同的海拔高度和電機(jī)輸出功率的分配給車速帶來了影響,而制定更具有節(jié)能效應(yīng)的駕駛策略,往往需要根據(jù)道路的坡度、車速來調(diào)整電機(jī)在整段道路的功率分配。
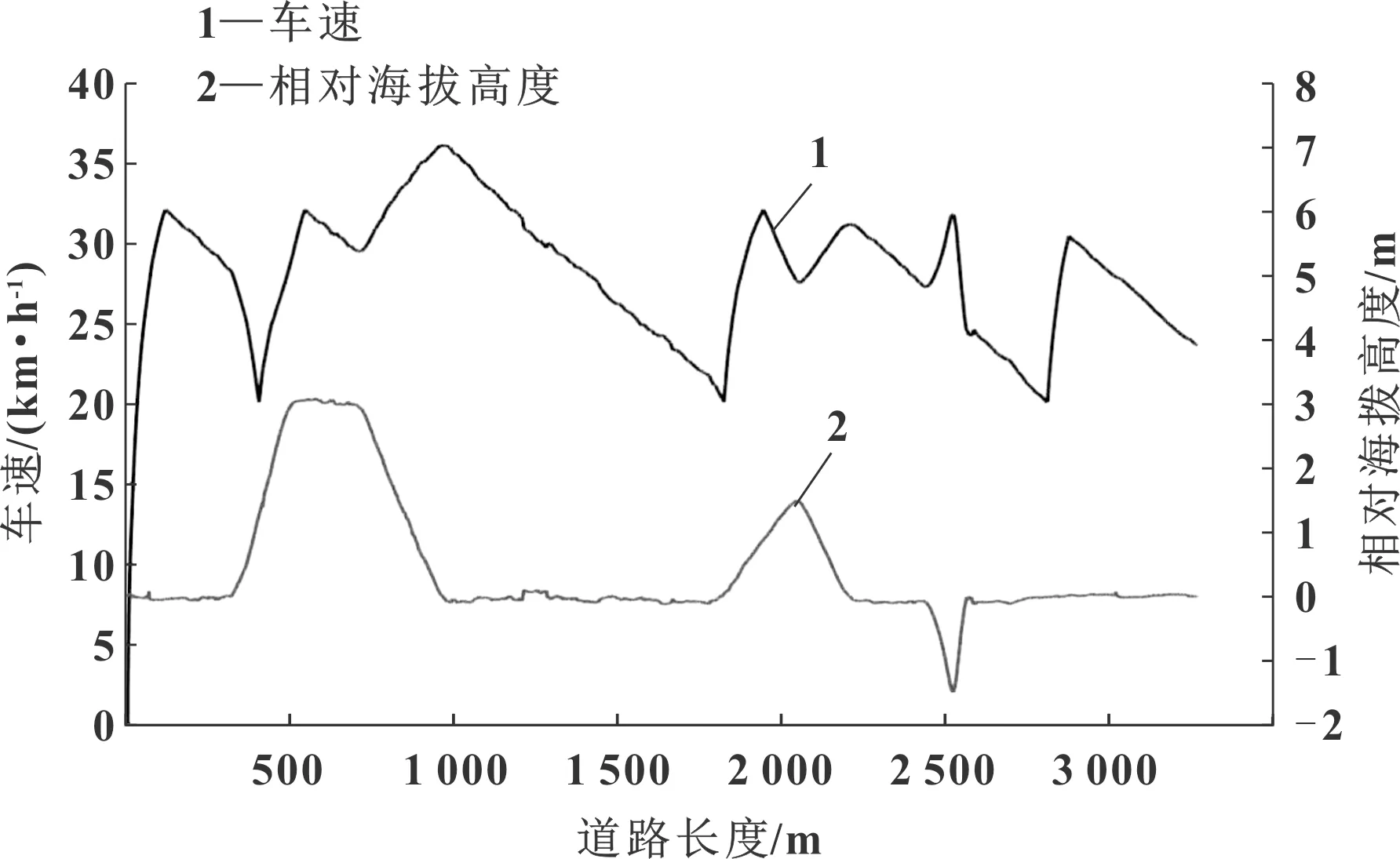
圖11 車速曲線與相對海拔高度的關(guān)系
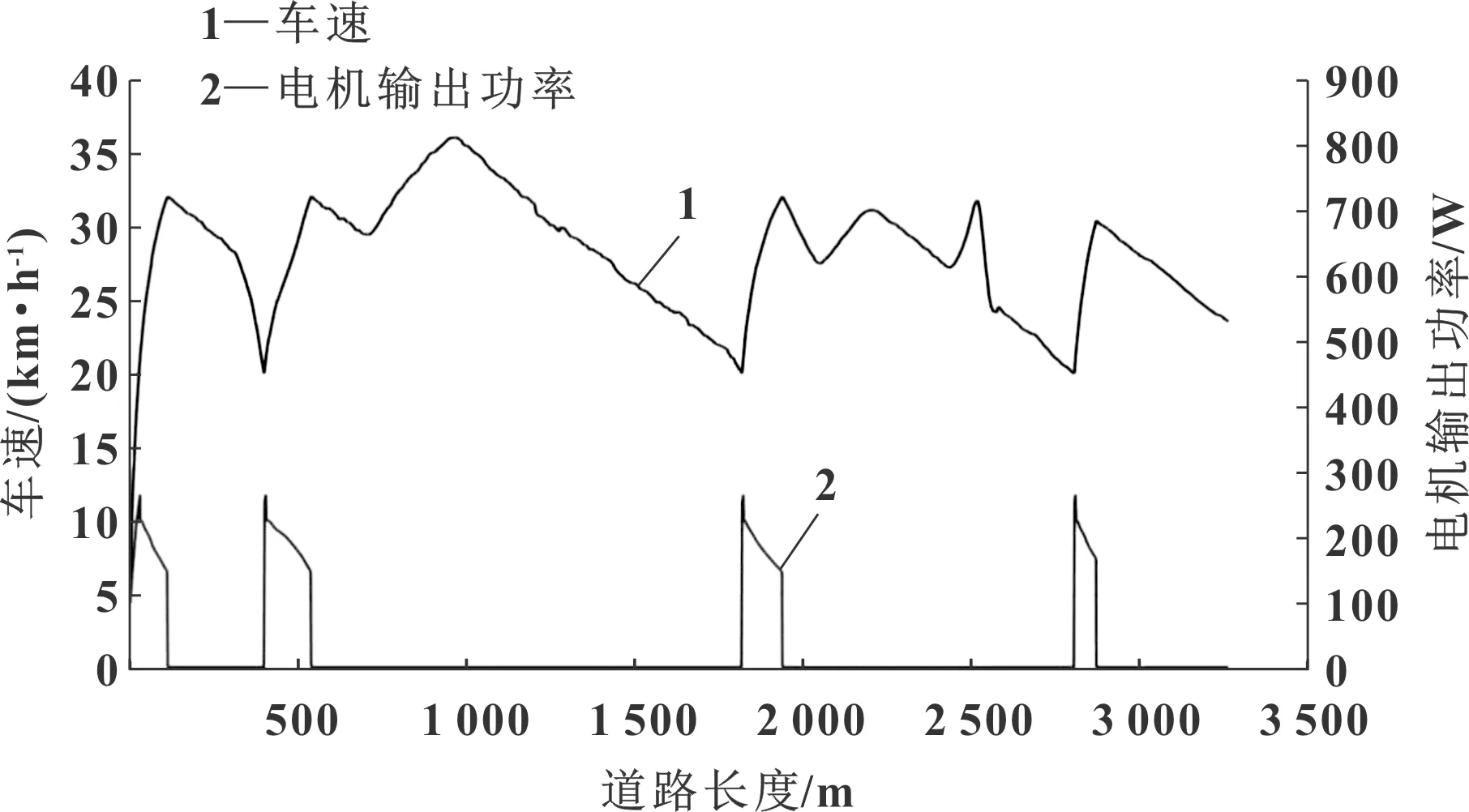
圖12 車速曲線與電機(jī)輸出功率分布的關(guān)系
圖13為駕駛員操控的電門開度值,圖14為電機(jī)工作效率仿真結(jié)果。由圖可見:電機(jī)工作期間的效率基本大于80%,車速具有較明顯的加速再減速的循環(huán)特征;電機(jī)工作時間占車輛行駛總時間較少,證明節(jié)能賽車具備低滾阻、低風(fēng)阻的優(yōu)點;受到起伏不平的道路坡度角影響,節(jié)能車會在某一段距離速度超過35 km/h,原因是在長距離的下坡路段,節(jié)能車不斷滑行加速。
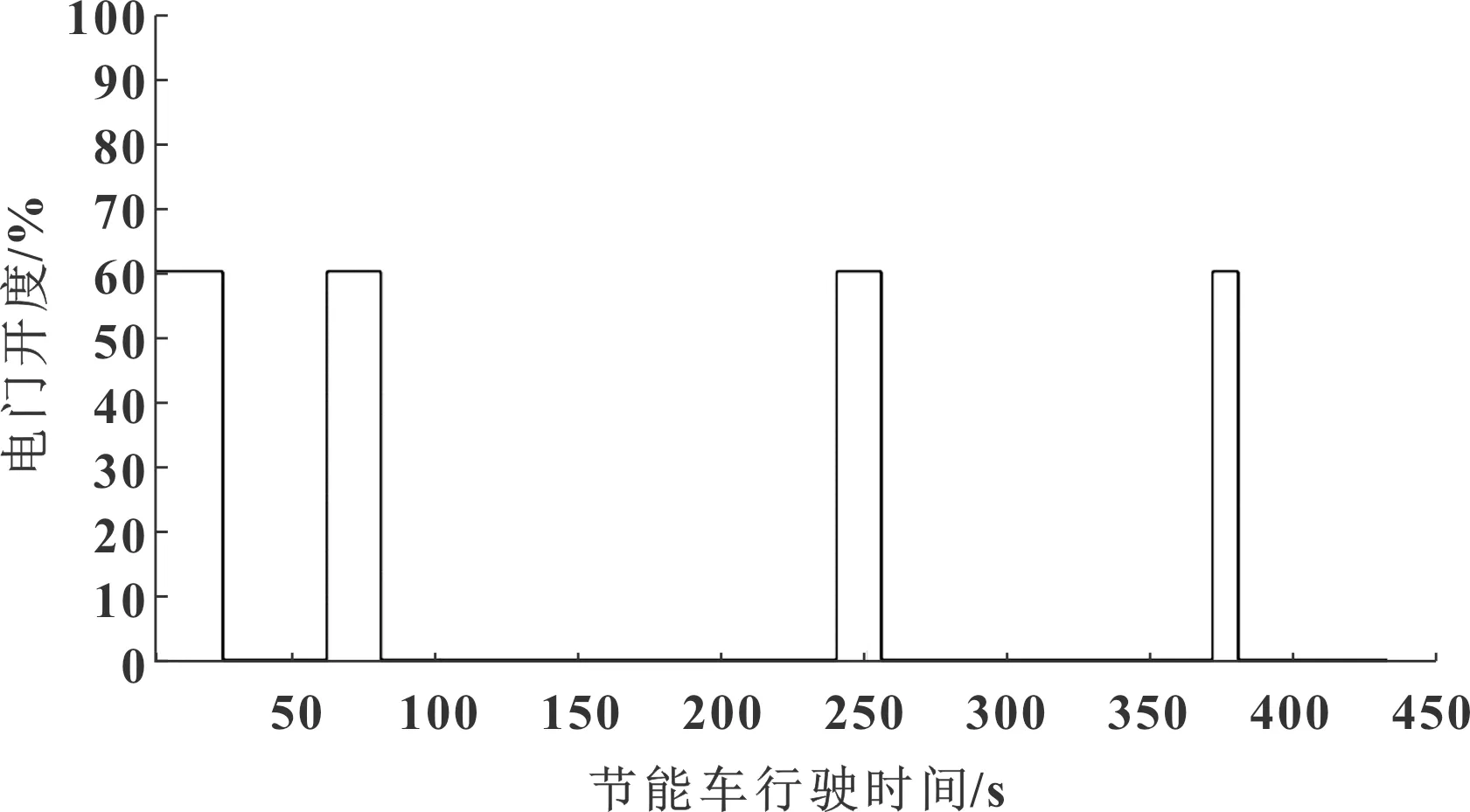
圖13 駕駛員操控的電門開度值
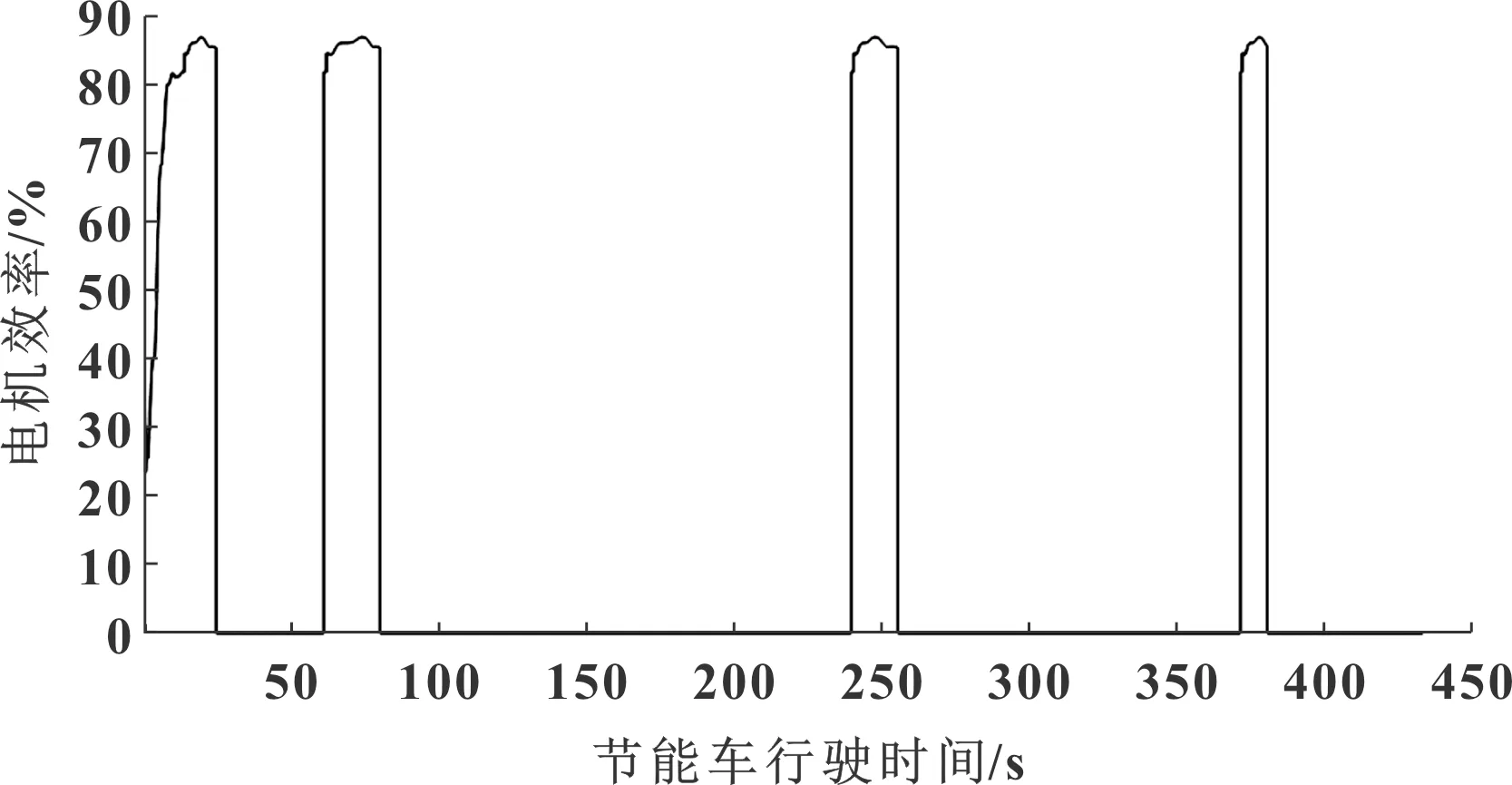
圖14 電機(jī)工作效率仿真結(jié)果
在如圖15所示的結(jié)果查看模型中,添加Display模塊可直接觀察數(shù)據(jù)。由圖可以看出,按照仿真設(shè)定的條件,節(jié)能車在該路段的平均行駛車速為26.74 km/h,每度電能行駛698.3 km;則在該路段按照本文設(shè)定的駕駛策略行駛,能達(dá)到最低時速25 km/h的條件,并且能在有限的電量下跑出更遠(yuǎn)的距離。
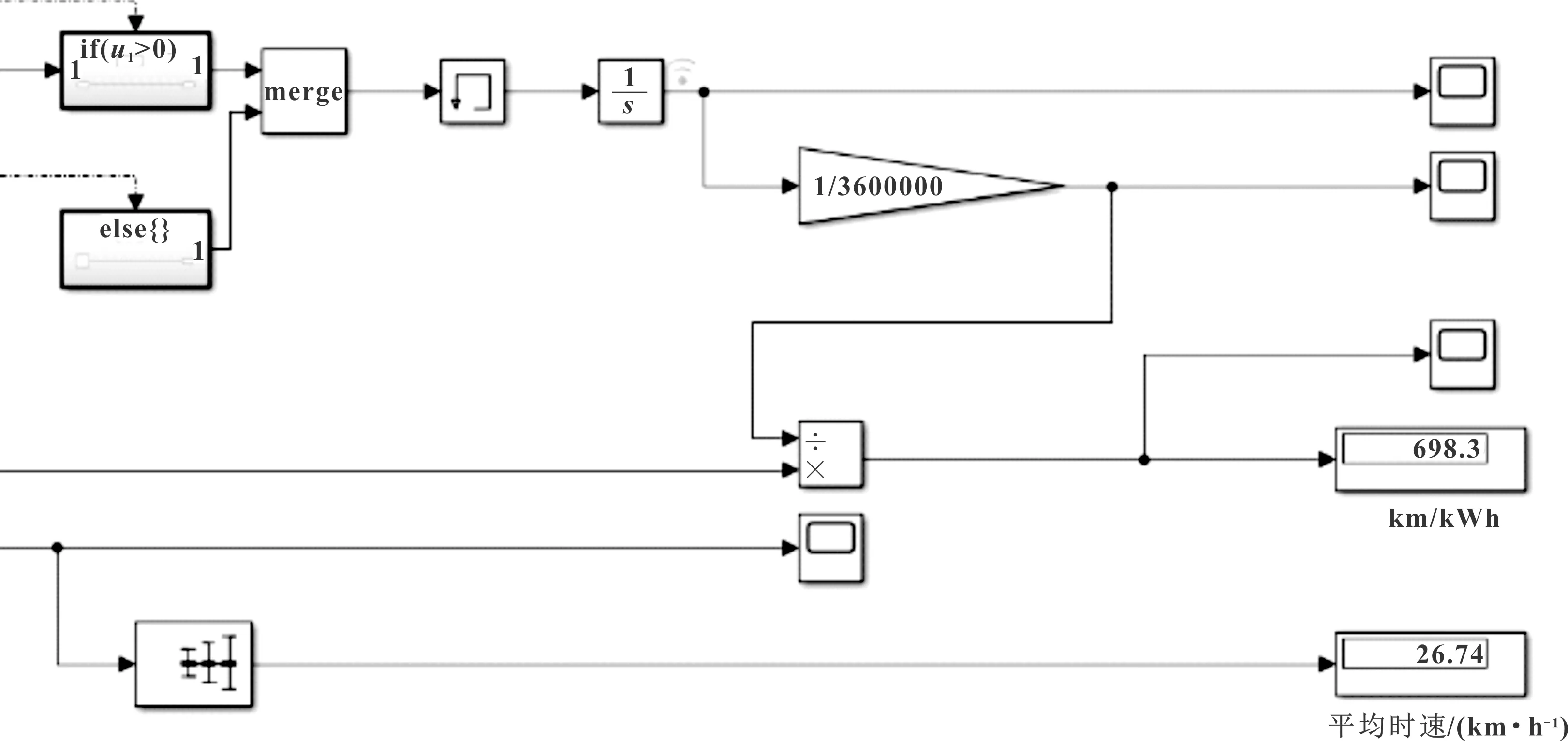
圖15 結(jié)果查看模型
7 結(jié)束語
根據(jù)目前在中國舉辦的殼牌汽車環(huán)保馬拉松大賽和中國節(jié)能競技大賽的電動組別賽事規(guī)則,最小能耗、最遠(yuǎn)續(xù)航里程的車輛為節(jié)能競技比賽的優(yōu)勝者。通過Simulink搭建EV節(jié)能車能耗仿真總體框架和車輛縱向動力學(xué)模型,建立了駕駛策略模型;結(jié)合行駛道路的坡度和轉(zhuǎn)彎半徑信息,以“加速-滑行”的駕駛策略進(jìn)行行駛能耗分析。通過仿真結(jié)果可初步檢驗節(jié)能車在“加速-滑行”的特定行駛策略下,其平均時速達(dá)到賽事要求,續(xù)航能力較好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03