紅外低軌星座突發任務多重策略調度方法
2023-01-12 11:48:14張晟宇朱振才胡海鷹
北京航空航天大學學報 2022年12期
張晟宇, 朱振才, 胡海鷹
(1. 中國科學院微小衛星創新研究院, 上海 201203; 2. 上海微小衛星工程中心, 上海 201203;3. 中國科學院大學, 北京 100039)
紅外低軌星座是通過全球組網,協同工作完成對空間高動態時敏目標實時探測發現、跟蹤定位的復雜系統。 星座需要對全球范圍目標出現的空域進行二重覆蓋,并在目標出現之后快速響應形成觀測資源對目標的分配。 由于目標有其不可預見性與隨機性,針對目標任務的觀測任務具有突發性,突發性任務具有輸入精度低,捕獲窗口短的特點,突發任務對于全球覆蓋的星座提出高時效響應的要求,需要快速地選出執行任務的衛星來完成觀測。
針對事件快速響應的方法研究方面,現有的研究主要針對如何動態地進行已有規劃方案的調整與重規劃[1-2],陳書劍等[3]提出了結合觀測路徑的突發任務響應時間最優的多星成像規劃方法,在向全局優化的同時進行時效性的增強。
星座的任務響應需要同時考慮單星觀測任務的規劃及多星之間的協同。 賀仁杰等[4]提出了通用的成像衛星規劃模型。 文獻[5-7]針對不同方面的單星規劃問題提出了啟發式、基因算法等。
同時紅外低軌星座調度還需要衛星開展協同規劃。 姜維等[8]提出了通用的協同規劃模型,文獻[9-10]根據具體問題提出了超啟發等多種算法。
紅外低軌星座資源調度問題是一個復雜時空觀測資源動態分配問題,文獻[11-12]提出了包括基于補償跟蹤的低軌預警資源調度方法。 這些方法都針對紅外低軌星座中的一些特定的問題提出解決方案,但面向全球的實時響應調度方面,尚沒有結合紅外低軌星座的特點提出突發任務調度方法。 現有方法多采用直接進行全局優化。 紅外低軌星座衛星數量較多,當目標數量較大時,難以滿足系統實時任務響應的要求。 因此,本文提出一種多重策略下的星座突發任務快速優化策略,對目標觀測的分析結合紅外星座的軌道特性開展,可以提高系統對突發任務的響應能力。
1 紅外低軌星座特性分析
紅外低軌星座的設計目標是構建一個面向全球分布的時敏動態多目標進行協同觀測的系統。星座的設計要滿足對于全球空域空間時敏目標立體觀測與組網通信的要求。 因此,對于目標空域的全球二重覆蓋及保持星座整網聯通的要求是星座設計的主要目標[13-15]。
1.1 空域覆蓋能力分析
空域覆蓋能力的主要約束包括臨邊觀測約束及最大探測距離約束。 如圖1 所示。

圖1 紅外低軌星座空域覆蓋示意圖Fig.1 Schematic of infrared LEO constellation spatial coverage
衛星需要在深空背景下觀測目標,即衛星與目標的連線應高于大氣臨邊的高度Ha。 衛星的紅外載荷探測能力是有限的,最大的探測距離為L。
紅外低軌星座為了獲得目標的位置與運動信息,需要同時為1 個目標分配至少2 顆衛星的觀測資源。
空間動態多目標的立體定位任務是系統的核心任務,立體觀測也是基礎的協同模式。 立體觀測由2 顆衛星同時對目標進行觀測。 在這個過程中,一顆衛星通過星間鏈路向另外一顆衛星發送自身的位置速度信息、傳感器的指向信息及標在圖像像面上的位置信息。 接收衛星通過計算本星和協同衛星的運動信息、目標測量信息完成對于目標的定位。 立體定位的工作模式如圖2 所示。
圖2 中,Sat1 和Sat2 為對目標構成立體觀測的2 顆衛星。 由Sat1 和Sat2 指向目標的視線LOSsat1和LOSsat2構成了立體觀測角。 Sat1 和Sat2之間通過星間鏈路(ISL)進行通信,通過交互自身運動信息及目標測量信息完成對目標的立體定位。

圖2 立體觀測工作模式Fig.2 Stereo observation mode
為了進行全球覆蓋將臨邊約束和最大觀測距離投影到地球表面。 其中由臨邊約束產生的不可見區域是以星下點為中心,弧段Db(Ht)為半徑的圓形區域。 其中Ht為目標的高度,因此,這個圓形區域的大小是變化的,由目標分布的上下邊界決定。 不可見弧段長度Db(Ht)為Db(Ht)=

式中:Re為地球半徑;Hs為衛星高度。
同樣,最大觀測距離到地面也產生一個半徑為D(Ht)的圓形區域。 最大探測弧段為

以星下點為中心,最大可觀測距離去除不可觀測范圍獲得1 個環帶區域,環帶的寬度為

式中:Dl為可見投影弧段。
投影到地面的覆蓋示意圖如圖3 所示。 其中藍色部分為衛星的單重覆蓋區域,紅色為空域的二重覆蓋區域,星下點的中心區域未被覆蓋的部分代表盲區。 覆蓋的投影大小隨著目標高度的分布不同而變化,目標高度越低則盲區越大,目標高度越接近衛星的高度則覆蓋區域越大。

圖3 空域覆蓋地面投影示意圖Fig.3 Terrestrial projection of spatial coverage
從紅外低軌星座的觀測特點出發,結合全球覆蓋特性的要求,適合選用Walker 星座構型。 其中Walker 星座δ 構型具備較好的覆蓋特性。Walker-δ 的特點是由多顆高度相同,傾角相同,軌道面之間升交點均勻分布,軌道面內衛星的相位也均勻分布的一種星座。 常用T/P/F來表示其構型,其中T為衛星總數,P為軌道面的數量,F為相鄰軌道面間的相位差[16-17]。
結合對于紅外低軌星座覆蓋能力的分析,可以進行紅外星座規模的分析與設計。 將觀測能力投影到地面分析覆蓋特性。 覆蓋分析如圖4所示。
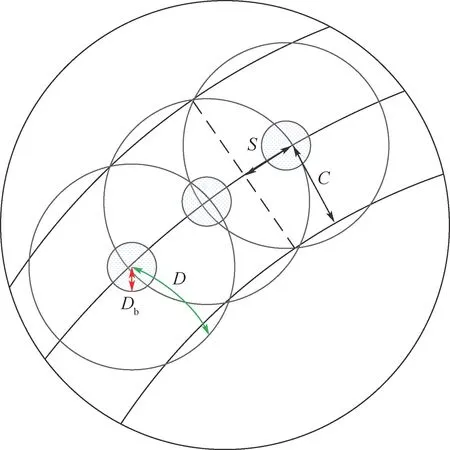
圖4 星座的覆蓋投影分析Fig.4 Project analysis of spatial coverage
衛星在一個軌道面中均勻分布,在軌道面內星間的半間距S決定了一個軌道面內所需衛星的數量N,軌道面半覆蓋寬度C決定了所需軌道面的數量P。 軌道面和軌道面中衛星數量為

式中:D為最大探測距離投影弧段長度。
1.2 通信約束分析
星座的設計還要考慮到星座可以實時保持網絡聯通性能。 因此,需要考慮星間鏈路的約束,如圖5 所示。

圖5 星間鏈路示意圖Fig.5 Inter satellite link
2 顆衛星的星間地心角θISL和衛星的高度Hs決定了2 顆衛星的通信距離。 同時衛星之間為了降低鏈路的損耗,需要避免穿越大氣,需要考慮鏈路保護高度Hc。 星間通信最大地心角和傳輸距離的計算如下。
星間通信最大地心角為

傳輸距離為

因此,軌道面內衛星數量N也需要滿足:

同時要求2 個軌道面之間至少有1 對衛星可以跨軌道面組鏈路(inter orbit ILS,IOL),因此,軌道面之間衛星的最小地心角應小于軌道面內的最大地心角:

1.3 星座設計結果
星座設計輸入如表1 所示。 在表1 的輸入條件下,基于雙重約束的星座優化分析,200 ~2 000 km的空域實現二重覆蓋,至少需要28 顆衛星,在200 km 處實現絕對的二重覆蓋,衛星的數量需要增加,采用32 顆衛星的設計二重覆蓋則接近99.99%。 因此,選擇4 個軌道面,每個軌道面8 顆衛星,總共32 顆衛星組成的Walker 星座作為設計結果,采用32/4/1/1 600 km/60°的星座構型。 星座內種子衛星Satellite1 的初始軌道參數如表2 所示。
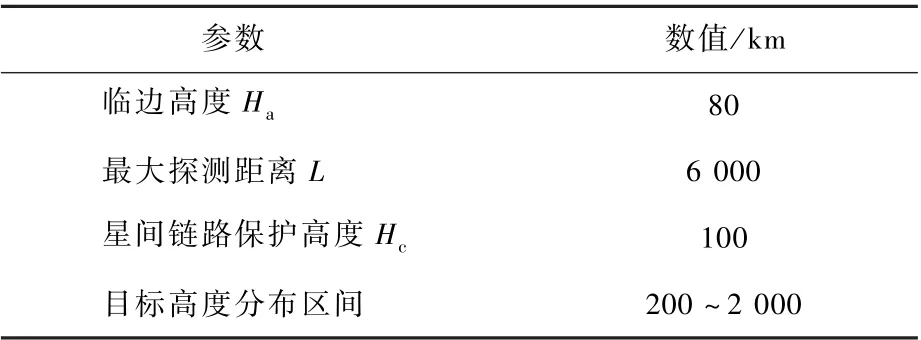
表1 仿真參數設置Table 1 Simulation configuration parameters
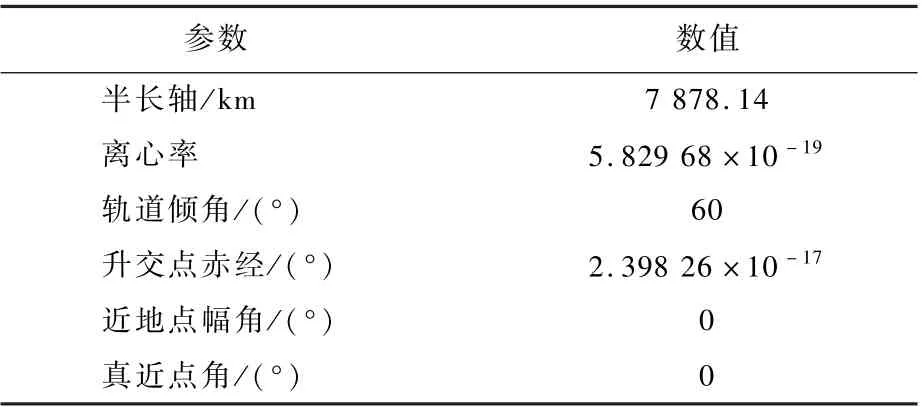
表2 衛星Satellite1 軌道參數Table 2 Orbital parameters of Satellite 1
傾斜軌道Walker 星座的空間幾何關系具有高度動態性,但經分析, 紅外低軌星座具備空間結構穩定性的特點,主要體現在:軌道面的數量及軌道面的傾角是固定的;軌道面內的衛星數量及衛星之間的相位間隔,在一般情況下也是固定的;雖然在全球的分布狀態是動態的,但總體保持較為均勻的分布;雖然衛星運動高度動態,但衛星之間的相對位置關系變化具有很高的周期性。
因此,對于紅外低軌星座的管理與調度需要充分考慮其空間中星座的均勻性、對稱性及變化規律周期性的特點,對于星座管理與星座特性的分析,Chen[18]、Rossi[19]等分別進行了相關的星座構型維持及星座安全方面的研究。
2 多重策略任務應急調度方法
2.1 突發觀測任務問題建模
2.1.1 問題模型
紅外低軌星座對于突發任務調度的問題,是一個具有時間和空間復雜性的觀測資源動態分配問題。
為了完成觀測資源的分配需要進行主要的計算過程,首先是可見窗口AW 的計算,進行n顆衛星Sat ={Satj}與m個目標Tar = {Tari}之間所有可用觀測窗口的計算,獲得可見窗口集合AW ={}。 在完成可見窗口計算后,根據系統的任務目標Objectives ={objd},如對多目標定位或對高優先級目標定位,進行任務Tasksys= {}的分配。 由于衛星的資源Sat = {Satj}有非常強的可替代性,在資源的優選過程中,需要衛星特性及任務特性相關的策略Strategies ={strar}來支撐調度方案Scedule ={}的快速生成。為一個M×K的任務分配矩陣,表示t時刻對m個待觀測目標分配k顆衛星作為觀測資源。 總結以上關系,有簡化的系統任務規劃與調度模型如下:

2.1.2 目標變量
目標Tari包含的信息如下:

式中:IDi為目標的系統編號;wi為目標的系統權重;sti為開始時間;eti為結束時間;periodi為周期;positioni為目標位置信息;velocityi為目標速度信息。
2.1.3 衛星資源變量
對于衛星Satj:

式中:SCIDj為衛星的編號;Rolej為衛星在系統任務中承擔的角色,可以為主星或從星;Statusj為衛星的工作狀態;為Satj正在承擔的任務;Anglej為當前的衛星載荷空間指向角度;Positionj為衛星位置;Velocityj為衛星速度;WrokTimej為衛星還可工作的時間長度。
2.1.4 可見窗口變量

2.1.5 任務決策變量
在完成任務規劃后,生成規劃執行窗口集合:


2.2 目標函數
為了簡化問題,在調度過程中,主要考慮2 顆衛星同時可以觀測目標才滿足要求,每個傳感器1 個時間段只能觀測1 個目標。 優化目標時主要考慮2 個目標:選擇較長的觀測弧段;盡早開始觀測。
目標函數:
式中:wp為觀測時間的權重;wst為開始時間的權重。
約束條件:如觀測組合為(Satn,Satm),則
決策變量:
2.3 紅外低軌星座針對突發任務的多重策略研究
2.3.1 突發任務決策需求與流程分析
紅外低軌星座的決策與任務調度需要一個從全局到區域,由區域分配到具體的執行衛星,再根據執行衛星的執行結果調整調度方案。
紅外低軌星座在突發任務出現后,啟動決策與任務規劃調度。 在全局層面首先需要解決任務的分配問題。 在任務的分配中,需要決定將哪些任務分配給哪些衛星執行。 全局初始分配階段,根據目標的數量、優先級和預測軌跡激活衛星的分組策略,決定對每個目標需要哪些衛星,以及這些衛星如何分配到不同的分組中。 這個階段的決策調度屬于匹配型的調度,是一個任務在多個資源中選擇合適的資源。
激活分組策略后,形成了針對每個任務的分組,主星啟動任務規劃與調度會出現1 顆衛星在任務時間段內具備對多個任務的執行能力,尤其是在多個任務分配到1 個分組后,衛星資源已經無法滿足對所有任務的執行,衛星資源需要優先執行高優先級的任務,并通過合理的任務執行排序,獲得較大的任務執行收益,因此,組內的任務規劃與調度屬于次序型調度問題,優化每個任務的資源分配及分配次序。
主星完成了任務規劃與調度,并將任務分配到執行衛星后,衛星開始對目標進行觀測,并生成觀測結果,結果反饋到主星,主星需要通過任務的完成情況,如預期時段衛星未完成對目標的觀測,或者提取完成對目標的觀測等情況下決策是否進行重新規劃,以及在目標的軌跡進入其他分組的觀測范圍后,主星向全局決策反饋全局重調度需求。 全局決策層若認為需要重調度,則將該執行結果作為新事件進行新一輪的調度。
全局決策主要解決任務分解的問題,是將Tasksys拆解為Taskgroup,主要對Tasksys中的目標Tari= {IDi,wi,sti,eti,periodi,positioni,velocityi}進行分配。 全局決策問題是解決將哪些任務分配到哪些資源的過程,不需要進行具體觀測窗口的計算。 因此,全局決策的實質是將任務分配到區域分組中的過程。
全局策略包含2 層策略:全球分組策略和任務分配到組策略。
全球分組策略中,需要解決的問題是如何對任務進行快速響應。 現有的初始分組策略研究,需要星座中全部衛星與全部目標的可見性計算,在通過約束與優化目標對適合觀測的衛星進行優化排序。 計算過程復雜,且未充分考慮目標在時間與空間的分布特性,以及紅外低軌星座的對稱性與運行過程的周期性。
在分組的策略上存在2 種典型的方法,一種是固定分組,另一種是動態分組。 這2 種分組策略都有各自的特點。 固定分組,分組中衛星之間主從關系是固定的,組內衛星的數量是固定的,因此一個分組擁有的觀測資源也是固定的。 但是紅外低軌衛星與目標都處于高速運動狀態,固定分組難以適應快速的空間拓撲變化,因此,固定分組策略在紅外低軌星座中是不適用的。 動態分組指組內的成員和主從關系是動態調整的,這樣的分組策略可以較好地適應動態的相對觀測關系。 由于目標的出現具有不確定性,對任務又要求快速的響應能力,因此,在動態分組策略下又進一步細分,提出一種兼顧固定分組優勢的區域動態分組策略,該策略采用地理區域固定的方式來適應目標出現的區域性,通過全球的區域劃分后,目標出現在任何區域都有觀測對應的分組可以快速響應,同時1 個區域中的衛星數量與衛星關系在1 個時間段內較為穩定。
針對出現在多個區域交界處并在飛行過程中跨越多個區域的目標,提出一種圍繞目標的快速分組策略,圍繞目標的飛行軌跡來選擇動態分組的衛星,該策略可以較好地適應目標觀測,但計算開銷較大,且分組動態性較高,本文提出一種基于多重策略的紅外低軌星座任務應急調度方法。 主要采用全球分區管控值守分組策略與基于相對運動分析的動態快速分組策略相結合的方法來提升對于突發事件的快速響應能力。
2.3.2 全球分區管控值守分組策略
根據星座內衛星的分布特性,雖然衛星處于高度動態的過程,但是選取合適的空間范圍后,處于空間范圍內的衛星數量是相對固定的,而且出入區域的時間也具有很高的周期特性。
因此,在紅外低軌星座中采用一種長期在軌維持的分組策略。 將經度寬度為90°,緯度寬度為90°的1 個區域劃分為1 個值守區域,進入該區域的衛星動態組成分組。 這樣在全球范圍內劃分出8 個值守區域,獲得8 個分組。 分組集合為

對于每個分組包含的變量為

式中:na 為區域編號,取值在1 ~8 之間;Satna為組內衛星集合;Tarna為分配給該組的目標集合;Lna為組內主星;Fna為組內從星。
區域分組如圖6 所示。

圖6 全球分區示意圖Fig.6 Global surveillance area
對于4 個分區交接的區域,組間在這些區域切換頻繁,因此,針對正對赤道上經度0°、90°、180°、 -90°的4 個區域交點為中心,設立4 個經緯度寬度為20°的沖突區。 如果目標落入沖突區,則觸發動態快速分組策略。 動態快速分組共4 個觸發區域,分組集合為

2.3.3 基于相對運動分析的動態快速分組策略
基于相對運動分析的快速動態分組策略,主要為了解決2 個問題:①在4 個區域交界處的分組沖突問題,因此在目標出現前,該策略不激活;②解決在目標落入該區域后如何快速組成觀測組的問題。
在動態快速分組策略中,軌道的固有特性依然是分組策略制定的重要依據。 由于Walker-δ星座中多個軌道面的升交點經度ΩA在赤道上也是均勻分布的,因此,可以將不同軌道面按照升交點經度與沖突區的距離關系,將其分配到動態沖突區中。 由于軌道面的對稱性,需要同時考慮軌道面的降交點經度ΩD。 通過計算來選取距離分區最近的軌道面。 其中,為沖突區的中心經度,Ωcentral為軌道面的升交點經度或降交點經度的中心經度。 這是由于一個軌道面的所有衛星的升交點經度都分布在一個寬度為RΩ的經度區間里:

式中:Top為該軌道面的軌道周期;ωe為地球速度。
因此,每個分組包含的變量為

式中:ca 為區域編號,取值在1 ~4 之間;Satca為組內衛星集合;Tarca為分配給改組的目標集合;Lca為組內主星;Fca為組內從星;ΩA為最近的升交點經度所處軌道面編號;ΩD為最近的降交點經度所處軌道面編號。
選定軌道面后,需要進一步選擇軌道面上的衛星組成分組。 本文采用基于相對運動分析選取原則。 在獲得目標的位置和初步的運動速度信息后,計算目標與衛星的相對運動角度并設計相對角度影響因子,依據目標與衛星的距離設計相對距離影響因子,以及由目標高度生成半徑為Db(Ht)的不可觀測區域影響因子,從而形成基于相對運動分析的軌道面內選星因子為

式中:wra、wdis、wbd分別為對應相對角度影響因子、距離影響因子和不可觀測區域影響因子的權重。
2.4 調度方案求解過程
基于多重策略的調度流程如圖7 所示。 調度方案的具體執行步驟如下:
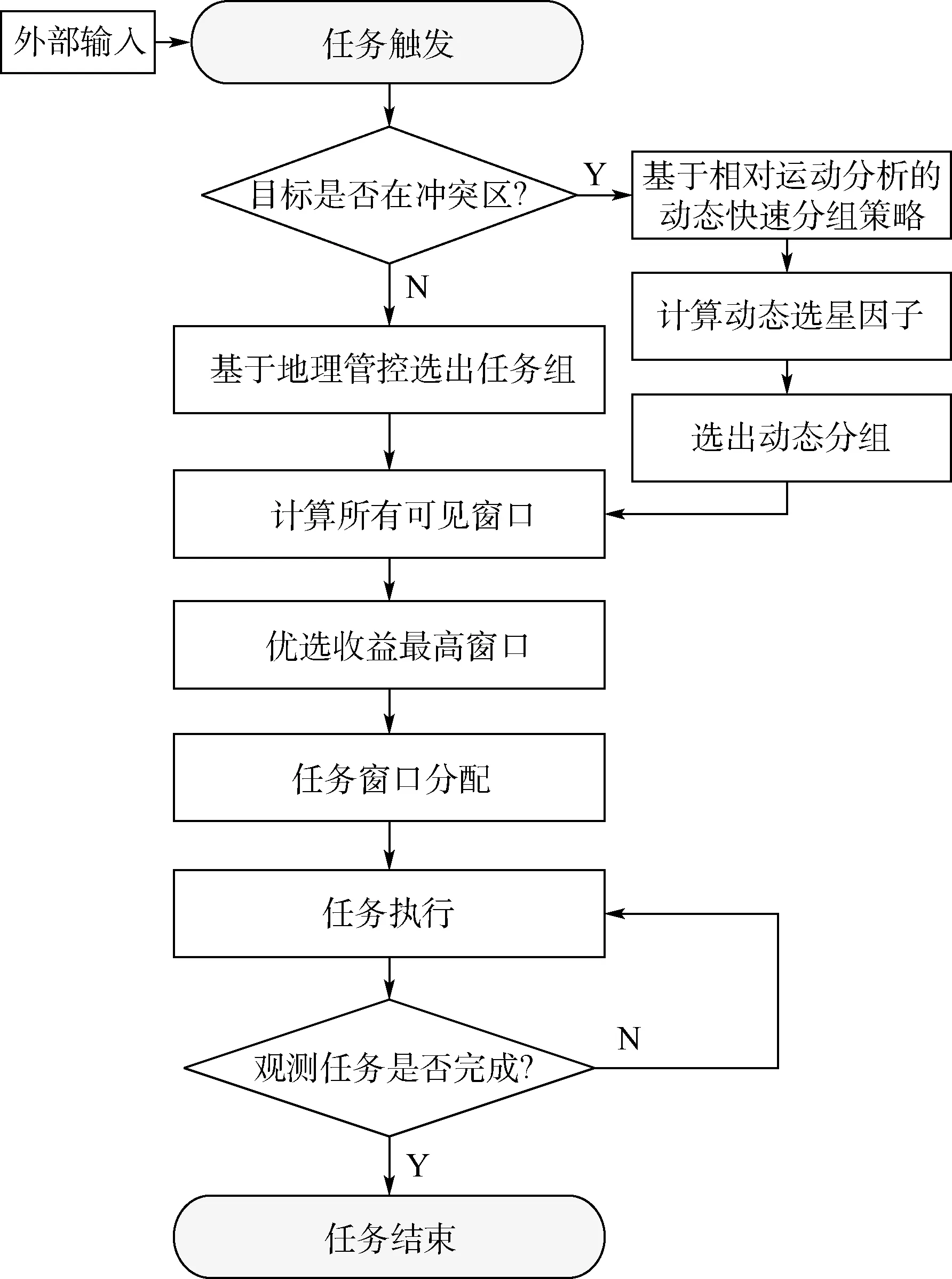
圖7 任務調度流程Fig.7 Scheduling procedure
步驟1在外部目標信息輸入條件下觸發初始任務調度方案。
步驟2依據目標位置所在區域進行策略的選擇,如在地理值守區域則根據區域的分組信息直接觸發任務規劃與調度的計算過程;如目標位置處于沖突區域,則觸發基于相對運動分析的動態快速分組策略。 根據沖突區選擇臨近軌道面并通過選星因子選出動態觀測分組。
步驟3確定分組之后,根據目標軌跡預測以及衛星信息計算所有可見窗口。
步驟4根據目標函數和約束條件進行任務窗口的優選。
步驟5通過星間鏈路進行任務分配。
步驟6任務執行。
步驟7判別觀測任務是否結束,是則調度過程結束,否則執行步驟6。
3 仿真算例
3.1 仿真輸入
選取3 個目標進行任務規劃窗口的計算仿真,3 個目標的輸入軌跡點坐標如表3 所示,表中包含目標初期2 個位置點的經度、緯度和高度,用于進行可見性與初始軌道的優選。

表3 目標初始位置Table 3 Targets initial position
各項權重的取值如表4 所示。
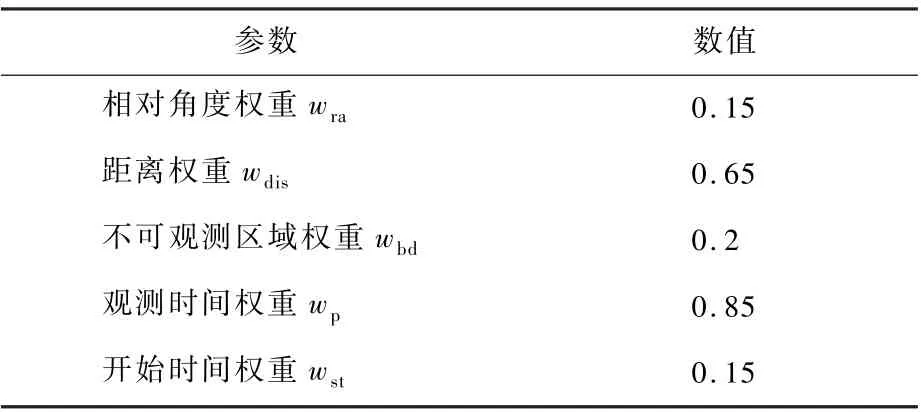
表4 權重設置Table 4 Weight configuration
3.2 仿真結果
3.2.1 衛星分組結果分析
首先對目標1 進行分組分析,目標1 出現的位置是( -19.203°, -38.226°),屬于全球分區管控值守分組中的G8分組,該組的衛星包括(Sat15,Sat37,Sat38,Sat45,Sat46)。 采用相對運動分析的衛星優選方法與區域分組進行對比,采用相對運動分析進行優選的結果如圖8所示。

圖8 目標1 軌道面與衛星篩選結果Fig.8 Selection of orbit plans and satellites for Target 1
采用相對運動分析優選出來的衛星是(Sat15,Sat16,Sat37,Sat38),其中,Sat16 并非區域分組G8中的衛星,而是屬于G8相鄰的G5區域內的衛星。 在相對運動分析中,Sat16 被選入,因為Sat16 具備對目標1 的早期觀測能力,可以在任務初期獲得較好的觀測條件,因此被選入。 在進行區域分組分析時,目標的可見性分析應該包含最近的一個相鄰區域分組共同考慮可見性,從而實現較好的分組效果。
目標2 的初始位置為( -25.591°,21.137°),屬于全球分區管控值守分組中的G4分組,該組的衛星包括(Sat14,Sat22,Sat31)。 采用相對運動分析的衛星優選方法與區域分組進行對比,采用相對運動分析進行優選的結果如圖9 所示。

圖9 目標2 軌道面與衛星篩選結果Fig.9 Selection of orbit plans and satellites for Target 2
采用相對運動分析優選出來的衛星是(Sat14,Sat15,Sat31,Sat38),其中,Sat15 與Sat38,是屬于G4相鄰的G8區域內的衛星。 Sat38 在觀測開始約2 min 后進入G4區域。 再次證明了目標的可見性分析應該包含最近的一個相鄰區域分組共同考慮可見性的需求。
目標3 的初始位置為( -123.993°, 11.633°),屬于全球分區管控值守分組中的G3分組,該組的衛星包括(Sat11,Sat12,Sat42,Sat43)。 采用相對運動分析的衛星優選方法與區域分組進行對比,采用相對運動分析進行優選的結果如圖10 所示。
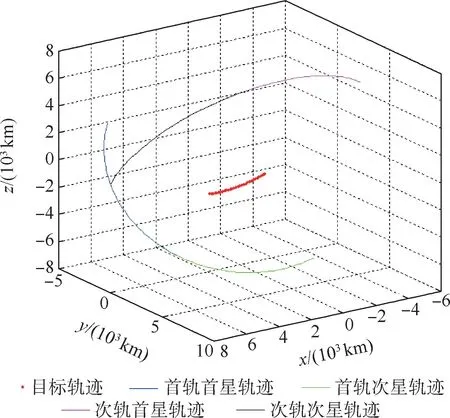
圖10 目標3 軌道面與衛星篩選結果Fig.10 Selection of orbit plans and satellites for Target 3
采用相對運動分析優選出來的衛星是(Sat11,Sat12,Sat27,Sat28),其中,Sat27 和Sat28是屬于G3相鄰的G7區域內的衛星。 Sat27 和Sat28 在目標3 出現的早期具備較好的觀測效能。再次證明了目標的可見性分析應該包含最近的一個相鄰區域分組共同考慮可見性的需求。
通過對3 個分屬不同區域的目標在其初始時刻進行區域分組和基于相對運動的動態分組分析。區域分組的結果和動態分組的結果相互印證了分組策略的有效性。 其中相對運動分組可以獲得初始時刻觀測條件較好的衛星分組。 對于區域分組,經過3 個目標的分析,證明在計算可見性時,不能只計算本組內的衛星與目標,應該將離目標最近的區域分組納入可見性的計算,從而可以保證將適合觀測的衛星納入可見性分析。
3.2.2 觀測窗口分配結果分析
通過對目標1、目標2、目標3 的軌跡進行外推,再與飛行弧段內的衛星進行可見性計算,將可見性窗口統一作圖獲得目標1、2、3 的可見性窗口如圖11 所示。
圖11 中可以看出,目標1 和目標2 都在場景的開始階段就出現了,并且存在可見窗口上有多個時段是重合的。 而目標3 在630 s 左右出現,與目標1 有較多可見窗口重合,與目標2 有部分窗口重合。 因此,在任務窗口分配的前期主要考慮目標1 與目標2 之間的分配關系。 目標3 出現后,目標3 作為新增任務,主要考慮在任務變化情況下的觀測窗口分配,分配結果如圖12 所示。

圖11 目標1、2、3 可見窗口Fig.11 Access windows for Target 1, 2, 3

圖12 目標1、2、3 觀測窗口Fig.12 Task windows for Target 1, 2, 3
觀測窗口分配計算采用100 s 作為規劃周期。 圖12 中,白色方塊表示對目標1 分配的觀測窗口,編號方式為“TW 1-e”,表示對目標1 的第e個觀測窗口。 綠色方塊表示對目標2 分配的觀測窗口,編號方式為“TW 2-e”,表示對目標2 的第e個觀測窗口。 棕色方塊表示對目標3 分配的觀測窗口,編號方式為“TW 3-e”,表示對目標3 的第e個觀測窗口。
每個規劃周期內為每個目標優選出2 顆衛星共同組成立體觀測組合,進行目標的立體定位觀測。 圖12 中目標1 的觀測窗口前期主要選擇并維持了觀測條件較好的Sat37 作為主要的觀測衛星,先后選擇與Sat37 組成較好觀測條件的Sat16、Sat38、Sat45、Sat44 等形成對目標的立體觀測組合。 對于目標2,為目標2 選出了觀測條件較好且觀測持續時間較長的Sat14 和Sat15 作為立體觀測組合進行目標立體定位。 在目標2 的觀測窗口后段,選用Sat38 和Sat36 先后與Sat14 配合完成對目標2 的立體觀測。 由于Sat14 與目標具有近1 000 s 的可見弧段,因此Sat14 被分配了最長的觀測窗口。 對于目標3 觀測窗口的分配結果為以觀測窗口較長的Sat27 為主要觀測衛星,先后安排Sat11 和Sat18 與其配合。
4 結 論
本文就紅外星座突發任務的規劃問題做出了深入分析和研究,提出一種多重應急調度策略,經過仿真計算,結果顯示所提策略下進行的任務調度具有較好的任務響應時效性,可以滿足大規模星座在軌實時規劃的需求,為紅外星座突發任務規劃奠定了基礎。
1) 本文提出基于區域值守的長期分組策略,面向地理區域進行長期分組,可以快速進行面向目標探測的組網和工作窗口的調度規劃,為全球性星座的快速任務規劃提供支撐。
2) 本文提出基于相對運動特性分析的動態快速分組策略,針對觀測條件優選觀測衛星,可以將具備最好觀測條件的衛星快速分配給觀測任務,獲得較好的組網觀測效果。
3) 本文提出的多重策略,充分考慮紅外低軌星座空間和時間的特性結合星座長期運行和任務突發的運行特點,具有創新性,可以滿足大規模星座在軌實時任務規劃的需求。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52