考慮折射影響的攝影測量法土工三軸模型精度分析
2023-01-12 07:05:50唐怡懷黃少染牟春梅
中國測試 2022年12期
唐怡懷, 黃少染, 牟春梅,2
(1. 桂林理工大學土木與建筑工程學院,廣西 桂林 541004; 2. 廣西巖土力學與工程重點實驗室,廣西 桂林 541004)
0 引 言
常規三軸試驗由于試驗裝置及方法的局限,只能獲取土樣整體的平均變形[1],無法詳盡地反映土樣的變形特征,且難以用于非飽和土體的變形測量[2]。針對以上問題,國內外學者將數字圖像測量技術用于土工三軸試驗中[3],通過圖像測量手段實現對三軸試驗過程中土樣的變形測量。基于圖像測量的三軸試驗方法不受土樣必須完全飽和的條件限制,還可以獲取土樣的局部化應變。目前常見的技術手段有數字圖像分析技術(digital image analysis technology,DIA)[4-5]、數字圖像相關技術 (digital image correlation technology,DIC)[6-7]、邵龍潭研究團隊的三軸試樣全表面變形數字圖像測量系統[8-10]以及Li 等[11-15]的攝影測量技術。基于DIA技術的三軸試驗是通過識別圖像中土樣的邊緣輪廓,獲取土樣軸向變形與徑向變形。該方法假設條件在實際情況中難以滿足,并且必須準確知曉壓力室及土樣與相機的相對方位[15],實際的測量精度難以達到預期水準。基于2D-DIC技術的三軸試驗通過關聯處理土樣變形前后的圖像,得到不同圖像中同名點的變化實現土樣表面局部化變形測量。但此方法僅局限于土樣局部化平面測量,無法實現對土樣的全表面立體觀測。隨著圖像技術的發展,在2D-DIC技術的基礎上,結合雙目立體視覺原理形成了3DDIC技術[16],運用雙相機從不同空間位置同時觀測目標物表面一點,根據其在兩幅同時刻的圖像中像素點以及雙相機的內外參數[17-18],確定其在空間中的三維坐標。然而,由于3D-DIC技術不能有效解決光線在壓力室和水的折射問題,難以應用于土工三軸試驗中。全表面變形數字圖像測量系統的三軸試驗利用亞像素點檢測原理,追蹤土樣表面各角點的位置變化,實現土樣表面任意時刻的應變場繪制。然而此方法需將圓筒狀壓力室改制成平面板狀從而不適用于常規三軸試驗,并且改制后的平面板狀壓力室仍無法消除壓力室與水產生的折射影響。攝影測量法的三軸試驗一定程度克服了上述圖像測量方法的局限性,無需對常規三軸試驗儀器進行任何改造,可在常規三軸試驗基礎上進行。該方法基于近景攝影測量原理,手持一部普通數碼相機(單鏡頭)采集土樣全表面二維圖像,隨后利用多視角下的三軸土樣圖像重構土樣的三維空間形態,實現對三軸土樣的軸向應變、徑向應變、局部應變及體變的全過程測量。此外,攝影測量法建立的折射修正模型,考慮了壓力室受圍壓作用下出現鼓脹變形導致折射界面的改變對折射修正結果產生的影響,可實現高精度的折射修正。
本文將近景攝影測量法用于土工三軸試驗,選用表面附有編碼點的硬質圓柱作為三軸模型。通過基于攝影測量的三軸模擬試驗,建立折射修正模型對折射誤差進行校正,獲取空氣中、壓力室并注水及折射修正后三種情況下模型軸向值與徑向值。將以上測量值與空氣中三軸模型游標卡尺測量值進行比較,評估在三軸試驗中攝影測量軸向與徑向的測量精度。同時比較三軸模型折射修正前后的形態異同,探究了折射對三軸模型成像的影響及軸向與徑向成像產生差異的原因。最后,為進一步提高攝影測量法三軸土樣變形測量的精度提供一定借鑒。
1 攝影測量法的基本原理
攝影測量法是基于近景攝影測量的原理,利用相機從至少兩個不同方位拍攝被測目標點的圖像,通過軟件識別不同圖像中的同名點,獲取不同圖像中同名點的圖像像素坐標,根據不同圖像的視覺交匯,確定該目標點的唯一空間點。具體的方法[11-12]如下:以常規三軸試驗為基礎,在加載框架、壓力室外表面及橡皮膜上張貼標記點RAD(ringed automatically detected)編碼點(詳見圖 1),每個編碼點都賦有唯一的序列編號,可被PhotoModelerScanner圖像處理軟件自動識別;利用校正表和軟件檢校模塊校正測試鏡頭,手持校正后的單鏡頭相機對壓力室內部被攝物體進行環繞式拍攝,將獲取的圖像分組輸入PhotoModelerScanner圖像處理軟件中進行識別與匹配;運用攝影測量分析技術確定拍攝相機的方位以及壓力室的形態與位置,隨后利用光線追蹤技術處理多重介質(水、有機玻璃壓力室、空氣)引起的折射問題,并運用最小二乘法確定被攝物體表面編碼點的最終三維坐標,重建加載框架、壓力室和被攝物體的3D坐標模型,進而根據編碼點位置的變化計算被攝物體的體積變化,實現被攝物體的局部與整體變形測量。
在三軸試驗攝影測量過程中,成像光線在多重介質的交界處折射產生偏移。為確定光線折射后的方向,在折射界面處運用折射定理即可根據入射光的入射角計算出光線折射角。但是在三軸試驗過程中,有機玻璃壓力室受圍壓作用下發生蠕變呈現微鼓脹形態,此時的折射界面與標準圓柱狀壓力室的折射界面不符。因此,如何擬合與壓力室實際形態相吻合的函數界面對恢復光線傳播路徑至關重要。針對上述問題,攝影測量法通過建立基于光線追蹤的折射修正模型校正折射誤差,獲取趨于被攝物體原型的三維模型。折射修正模型是基于壓力室玻璃材質均勻的假設前提下進行,其過程主要分成兩部分,一是有機玻璃壓力室形態和位置的確定,二是編碼點坐標的修正。圓柱形壓力室的形態和位置由含有9個未知參數的數學模型表征,模型參數根據壓力室表面編碼點的三維點云坐標使用最小二乘法求得最優的參數組合,擬合與實際相吻合的折射界面。編碼點坐標的修正即利用多條光線追蹤技術和最小二乘法消除折射對圖像測量結果的影響。光線追蹤利用光線的可逆性,通過像點逆向追蹤成像光線的傳播路徑確定物點坐標[19-20],但由于外部因素的不可控性,多條逆向光線難以按照理想狀態收斂成一點。為此,運用最小二乘法確定逆向光線最終交匯點,實現對編碼點坐標的準確定位。本文采用Li[11-12]所提出的基于光線追蹤的折射修正模型,并在此基礎上,將上述折射處理過程集合成程序,通過試驗分析攝影測量法建立的折射修正模型處理折射問題的準確性。
2 試驗方案及試驗數據獲取
2.1 試驗方案
本次試驗選擇一個形態規則的硬質圓柱作為三軸土樣模型(以下稱為三軸模型),模擬三軸土樣在空氣中以及充水后壓力室內部的狀態。分別采用精度為0.02 mm的游標卡尺和攝影測量法對空氣中和壓力室內部的三軸模型進行測量,將兩種方法所得軸向高度H和徑向直徑D進行對比分析。
2.2 試驗準備
2.2.1 模型標記點的設置
從PhotoModelerScanner圖像處理軟件中導出RAD編碼點并打印在A4紙上,隨后將若干RAD編碼點粘貼在三軸模型表面(呈9行×15列分布,共135個編碼點)。另外對每行、列進行編號,以便于后續試驗的圖像采集及結果分析,如圖1所示。
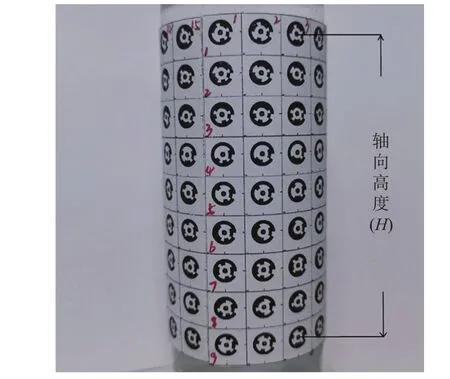
圖1 三軸模型標記點的設置
2.2.2 試驗系統的建立
在攝影空間內定義統一的世界坐標系與模型比例對重構三維模型具有十分重要意義,可實現不同重構模型之間的變形對比。為此,在三軸儀兩側加載框架上分別粘貼一列編碼點,世界坐標系通過加載框架上編碼點定義,構建以水平方向為X軸、豎直方向為Y軸的世界坐標系O-XYZ,模型比例通過游標卡尺測得加載架上點間距確定。隨后在壓力室外表面粘貼四行和四列編碼點,并將附有編碼點的三軸模型置于壓力室中心,試驗系統設置如圖2所示。
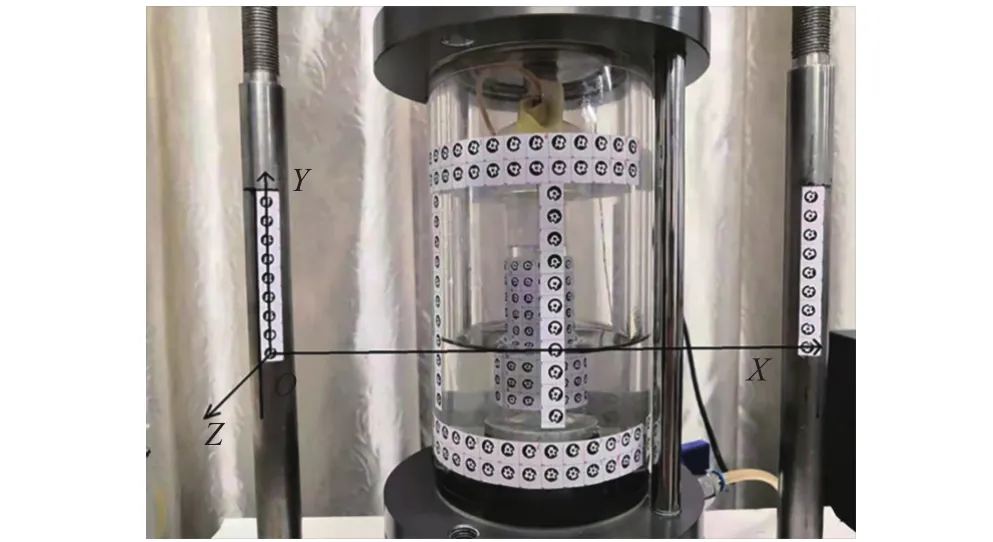
圖2 試驗系統的設置
2.2.3 相機校正
本次試驗采用手機(f/2.2光圈,800萬像素5鏡式鏡頭)進行攝影測量。同時選用手機具備:1)高分辨率、防抖、輕巧等特點,適用于室內開展圖像采集;2)其后置鏡頭為單攝像鏡頭,適用于攝影測量領域。然而,普通相機由于內方位元素未知以及鏡頭存在光學畸變,無法直接用于攝影測量。為了獲取相機內方位元素以及多種畸變參數,首先運用測試鏡頭環繞拍攝等距網格校正表,共12幅圖像,然后通過PhotoModelerScanner圖像處理軟件的檢校模塊完成上述參數的求解[21]。等距校正表及手機拍攝方位如圖3所示,相機校正結果詳見表1。
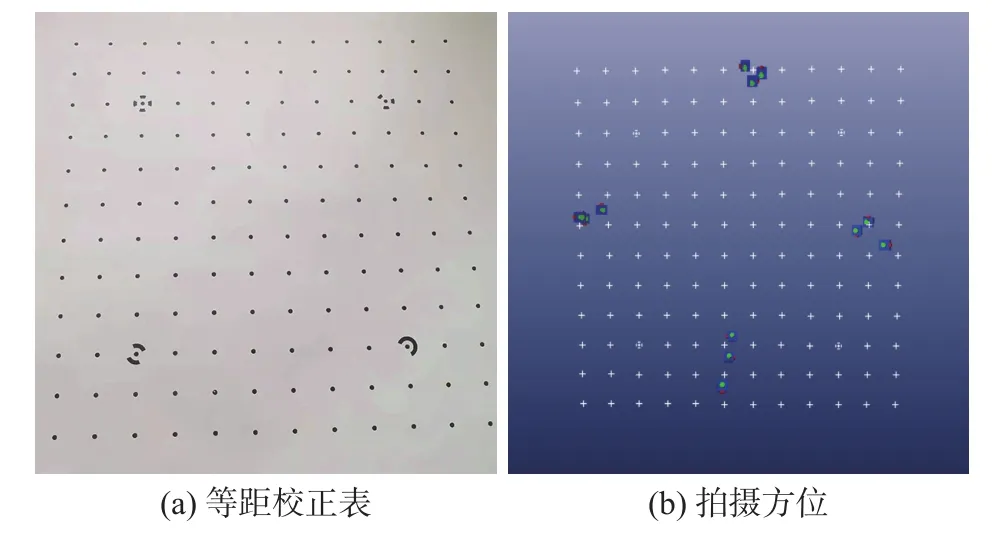
圖3 等距校正表及手機拍攝方位圖

表1 手機校正前后參數
從表1可見,除相機的橫向像素M、縱向像素N以及傳感器尺寸Fy外,其余參數與相機的標定參數皆存在明顯的差異。K1、K2表示徑向畸變參數,P1和P2表示切向畸變參數,在校正前相機的畸變參數均不為0,說明原圖像存在一定程度的圖像畸變,通過上述畸變參數可將呈現桶狀畸變或枕狀畸變的圖像恢復正常。相機的校正質量由像點的殘差值決定,通過軟件檢校模塊處理12幅圖像獲取校正表的空間點云圖,見圖3(b)。當最大像素殘差值在1.0 pixel及以下時,表明相機校正成功。
2.3 試驗數據的獲取
利用游標卡尺對三軸模型附有編碼點區域內的徑向直徑、軸向高度進行測量,按照編號統計相應測量結果。隨后進行系統設置并在三軸儀底座上安裝三軸模型,手持校正后的相機拍攝獲取空氣中、安裝壓力室并注水兩種情況下的三軸模型圖像。具體操作步驟如下:1)首先正對附有編碼點的荷載架從不同方位拍攝5~6幅圖像,隨后環繞三軸模型拍攝25~35幅圖像。2)拍攝完成后,安裝壓力室并注滿水,以相同的方式環繞壓力室拍攝,獲取包含加載框架編碼點、壓力室外壁編碼點及模型表面編碼點的圖像,一次拍攝50幅圖像左右。此外,相鄰圖像間的重疊率應大于70%,三軸模型表面每個編碼點至少在5幅圖像上出現。
運用PhotoModelerScanner圖像處理軟件對三軸模型圖像進行分組處理,輸出所有相機光心的三維坐標、壓力室外壁編碼點的三維坐標、空氣中三軸模型的三維坐標以及壓力室內部三軸模型的三維坐標等信息。根據相機光心、壓力室表面編碼點的三維坐標與壓力室內部三軸模型的三維坐標建立基于光線追蹤的折射修正模型,消除折射引起的放大效應,確定三軸模型表面編碼點的真實三維坐標。為便于執行折射修正過程,在Matlab軟件編寫了相應折射修正的程序,實現折射誤差的快速修正。
將三軸模型在空氣中以及壓力室內修正前后的編碼點三維坐標按行列編號進行分類統計。軸向上根據三軸模型表面首行與末行的兩RAD編碼點三維坐標z值之差確定,而徑向上提取模型RAD編碼點的三維坐標中x、y值,通過擬合圓函數獲取徑向直徑,并計算平均值。
3 試驗結果分析
試驗結果可分為三部分,一是評估空氣中進行攝影測量的準確性,二是評估模擬試驗中攝影測量的準確性,三是折射修正前后試驗結果對比分析。
3.1 空氣中的準確性驗證
利用卡尺和攝影測量法對編碼點間距進行對比測量,初步評估攝影測量法的準確性。如圖4所示,將分辨率為0.02 mm的游標卡尺放在印有編碼點的A4紙上,測量編碼點(編號1~10)兩兩之間的距離;使用經校正后的手機從不同方位拍攝,共6幅圖像,然后運用PhotoModelerScanner圖像處理軟件對圖像進行處理,獲取編號1~10相鄰兩編碼點的間距值,兩種方法測量結果見表2。
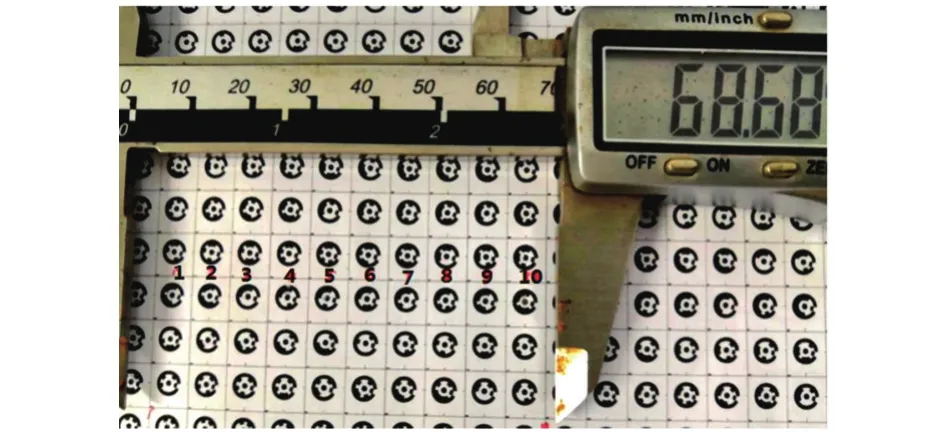
圖4 空氣中的精度驗證試驗
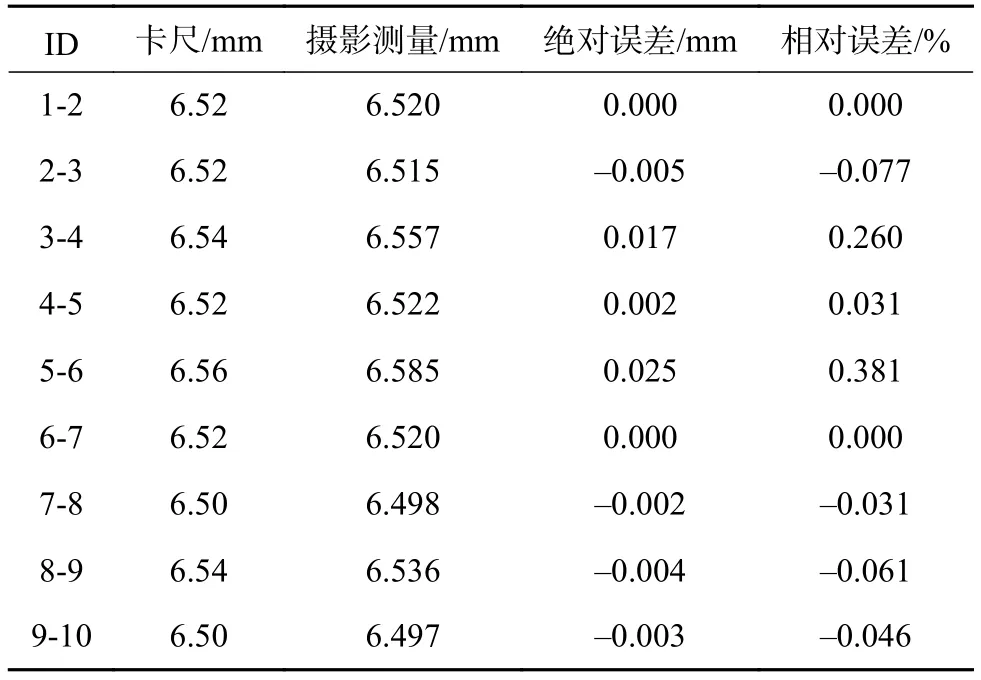
表2 游標卡尺和攝影測量法分析結果對比
從表2可見,以卡尺測量結果作為點間距的“基準值”,攝影測量結果與卡尺測量結果基本一致,點間距測量值的最大絕對誤差和最大相對誤差分別為0.025 mm和0.381%。在9個測量值中,7個測量值的絕對誤差值小于0.01 mm。由此表明,攝影測量法用于空氣中具有較高的測量精度,將其用于變形測量具有一定可行性。
3.2 三軸試驗的模擬試驗
在三軸試驗攝影測量過程中,由于有機玻璃壓力室和水所產生的折射會引起攝影測量結果的失準,故分析時需要考慮折射對測量結果產生的影響,其測量精度需要進一步分析。通過基于攝影測量的三軸模擬試驗,分別獲取空氣中三軸模型的尺寸測量值(H空氣、D空氣)和注水壓力室內三軸模型的尺寸測量值(H修正、D修正),將以上結果與空氣中三軸模型的游標卡尺測量值(H卡尺、D卡尺)進行比較,相關結果見表3、表4。

表3 三軸模型軸向高度測量結果分析
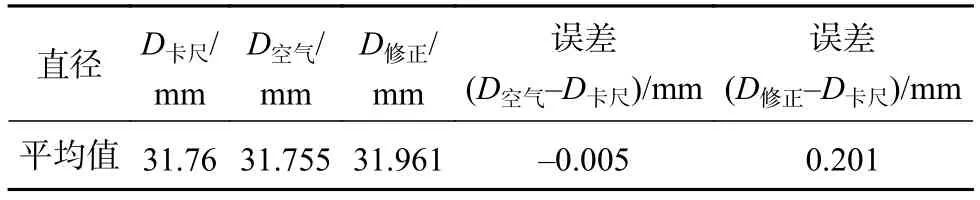
表4 三軸模型平均徑向直徑測量結果
根據表3三軸模型軸向高度的測量結果分析,以卡尺測量H卡尺值作為軸向“基準值”,在空氣中的攝影測量軸向測量值與卡尺軸向測量值相近,其中最大誤差為-0.075 mm,最小誤差為-0.001 mm,平均誤差為-0.038 mm;而修正后的攝影測量軸向測量值H修正與軸向“基準值”H卡尺存在明顯差異,最大誤差為 0.193 mm,最小誤差為 0.085 mm,平均誤差為0.133 mm,相較之下H修正值的誤差比H空氣值大。同時結合表2可知,同是在空氣中進行攝影測量,三軸模擬試驗中攝影測量的準確性卻不如在空氣中精度驗證試驗中的表現,空氣中三軸模型高度的測量誤差大于點間距的測量誤差。這是因為在處理空氣中三軸模型圖像時,各點坐標通過識別不同圖像中同名點確定,編碼點的殘差值并不完全小于1.0,故獲取的編碼點坐標存在一定的偏差;而在空氣中精度驗證試驗中,相鄰圖像間的重疊率達到100%,編碼點識別的準確性相對更高,故得到點的位置坐標更準確。
根據表4三軸模型徑向平均直徑的測量結果分析,以卡尺測量D卡尺值作為徑向“基準值”,D空氣值的誤差為-0.005 mm,而D修正值的誤差為 0.201 mm,在徑向上折射修正后的測量誤差明顯大于攝影測量空氣中的測量誤差。造成徑向修正結果誤差較大的原因可能有兩個:一是人為因素造成行向編碼點不完全處于一條直線上,從而影響了此次圓函數的擬合;二是攝影測量在折射修正過程中目標點的定位存在偏差所致。三軸模型上每個編碼點至少在5幅圖像上出現,理論上通過不同圖像產生的逆向光線形成的視覺交匯即為該編碼點的坐標位置,然而由于外部因素影響,光線無法按照理想狀態匯聚成一點。因此,運用最小二乘法解決光線無法交匯確定物點的問題,其基本原理是:假設物點為光源,那么所有光線都由物點發散,此時物點與所有光線存在最短距離即物點至逆向光線的距離di的平方和最小。在處理過程中,當di值大于臨界值0.15 mm時,即認為光線偏離距離較大,確定的物點誤差較大,應剔除對應的光線,隨后將剩余光線進行重新計算。
圖5展示了其中5個修正點所使用的圖像數量及具體的di值。從圖上可見,折射修正過程使用的圖像數量最少有8幅,最多有11幅,獲得的編碼點坐標將更加精確。同時,此次抽選5個點的di值絕大部分處在0.04 mm以內,表明通過最小二乘法確定編碼點的最終位置相對準確。
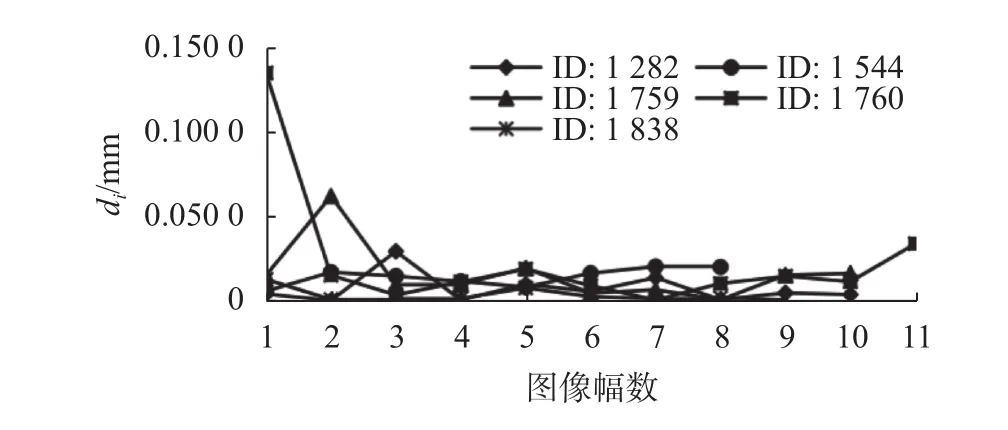
圖5 模型上5個修正點所用的圖像數量以及具體的di值
3.3 折射修正前后對比分析
為了進一步分析折射影響產生的放大現象,將折射修正前后三軸模型的形態繪制在同一圖形上,并根據點云坐標獲取折射修正前后的徑向測量平均值與軸向測量平均值,如圖6所示。同時,將修正前后的三軸模型軸向高度(H未修正、H修正)與卡尺測量值(H卡尺)進行比較,如圖7所示。
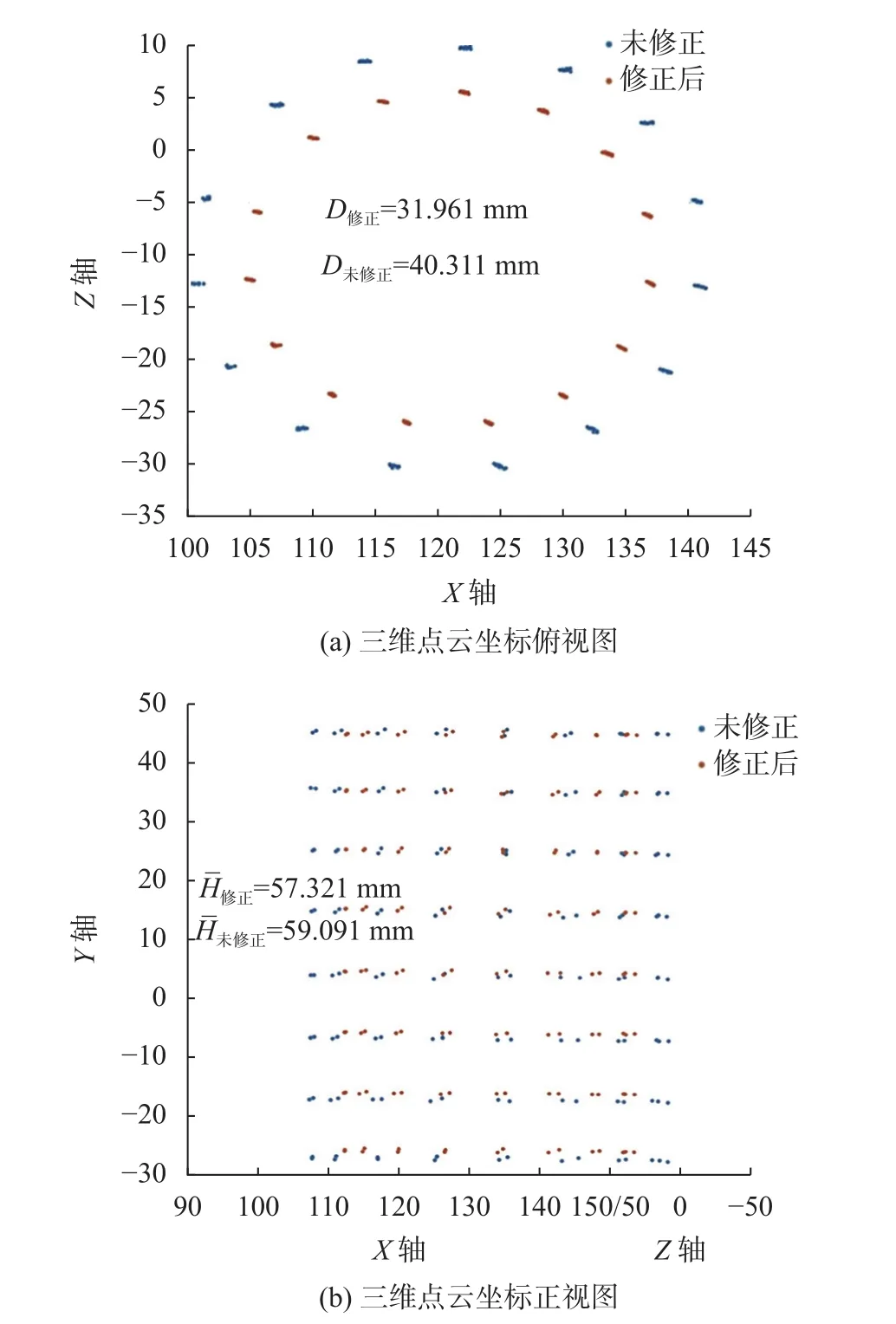
圖6 三軸模型修正前后形態對比
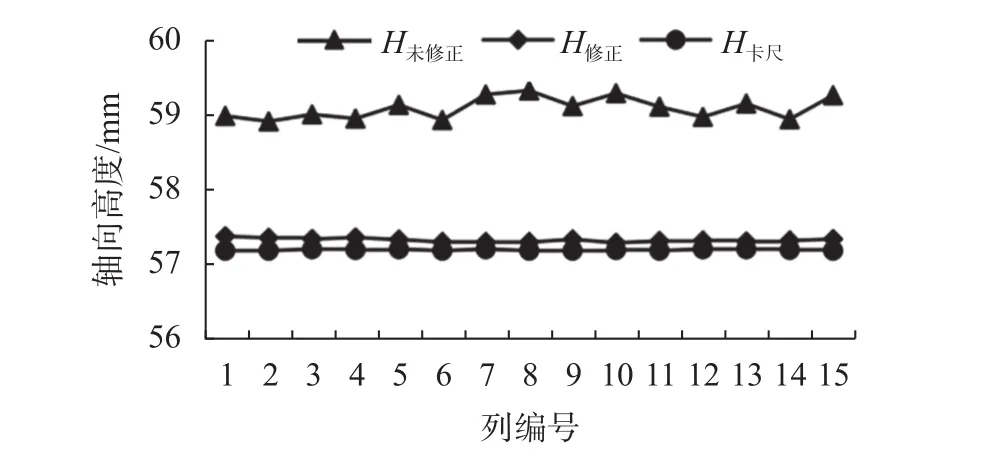
圖7 三軸模型軸向高度修正前后與卡尺測量值對比
從圖6可見,由于多重介質的折射影響,充水后的壓力室內三軸模型徑向與軸向均呈現出折射放大現象。但折射對三軸模型軸向與徑向的影響不一致,相對于軸向,徑向受折射影響的作用更為顯著,與圖2實際觀察的結果相吻合。分析其原因,在徑向上壓力室玻璃罩為一弧形曲面,使得充水后的壓力室如同一面透鏡,因此三軸模型的徑向測量不僅受多重介質的折射影響,還受到壓力室弧形曲面影響,導致成像光線在弧形曲面處發生明顯的曲折[22],成像時三軸模型的徑向直徑呈現明顯的放大變形現象,徑向測量平均值從 31.961 mm(D修正)放大至40.311 mm(D未修正),差值為 8.35 mm,其平均誤差增加26.29%;在軸向上壓力室玻璃罩如同一面平面玻璃,由于平面狀玻璃受到折射的影響較小[8],并且水、有機玻璃壓力室及空氣三者的折射率相近[15],成像光線受不同介質的折射的曲折程度較小,使得三軸模型軸向測量時呈現的折射放大現象相對不明顯,軸向測量平均值從57.321 mm()放大至59.091 mm(),差值僅為 1.77 mm,其平均誤差增加3.09%。同時,根據圖7模型軸向高度修正前后與卡尺測量值對比的結果分析,從圖上可見,盡管軸向受折射的影響作用相對要小,但其測量值與三軸模型實際測量值仍存在明顯差異。在進行折射修正前H未修正值均大于H卡尺值,此時每列軸向高度測量值波動幅度較大,從58.9 mm附近變化至59.3 mm上下波動,而折射修正后H修正測量值曲線變化幅度較小,與H卡尺測量值曲線近似平行,二者差值明顯減小。
由此表明,折射修正模型可以較為準確地修正折射所產生的放大變形,獲取趨近三軸模型原狀的三維模型。此外,成像時三軸模型軸向高度受折射影響并非呈一定比例放大,而是在某一范圍內波動,產生上述現象的原因主要是試驗受到相機拍攝的方位與角度、光照環境穩定程度以及玻璃材質的均勻程度等影響,三軸模型各方向受到的折射影響不一致,折射對三軸模型成像的影響存在波動。結合表3、表4數據分析,以空氣中卡尺測量的平均值作為“基準值”,折射修正后的軸向測量平均誤差為0.23%,徑向測量平均誤差為0.63%,這與折射修正前的軸向測量平均誤差減少3.09%,徑向測量平均誤差減少26.29%。上述試驗結果表明,通過基于光線追蹤的折射修正模型可以將折射所致誤差控制在試驗允許的范圍,將考慮折射因素的攝影測量法用于土工三軸試驗,基本滿足三軸土樣變形測量的精度要求。
4 結束語
本文通過空氣中的精度驗證試驗初步評估攝影測量法在空氣中拍攝測量的準確性。以硬質圓柱體作為三軸土樣模型,通過攝影測量的三軸模擬試驗對三軸試驗中攝影測量的精度進行驗證,分析壓力室與水引起的折射對三軸模型的成像影響以及折射修正模型處理折射問題的效果。同時探討將考慮折射影響的攝影測量法用于三軸試驗的適用性,得出以下結論:
1)在空氣中進行精度驗證試驗,攝影測量結果與游標卡尺測量結果基本吻合,點間距測量值絕對誤差在0.025 mm以內,攝影測量法在空氣中具有較高的測量精度。
2)不同介質的折射對三軸模型的成像有重要影響,基于光線追蹤的折射修正模型可以有效減少折射引起的測量誤差,經修正后的徑向平均誤差為0.63%,軸向平均誤差為0.23%,這與折射修正前的徑向測量平均誤差減少26.29%,而軸向測量平均誤差減少3.09%。
3)在折射修正前后,攝影測量徑向直徑平均值從31.961 mm放大至40.311 mm,而攝影測量軸向高度平均值從57.321 mm放大至59.091 mm,從數值變化可知,徑向受折射的影響顯著大于軸向。此外,三軸模型各方向受到的折射影響各不相同,成像時三軸模型各向軸向高度在某一范圍內波動,并非按照一定比例放大變形。
目前攝影測量法應用研究尚且不足,測量系統中還存在一系列誤差,如成像系統誤差、折射修正參數誤差、外部環境誤差等,有待進一步完善。從以下方面提出減少相應誤差的建議與措施:1)升級相機成像采集系統。引起相機成像系統誤差的主要因素為相機參數與圖像分辨率。今后可配備具有高精度參數的相機與高圖像分辨率的相機成像采集系統,從而提高攝影測量的精度以及圖像處理的效率。2)完善折射修正模型。折射修正模型參數是影響攝影測量法在三軸試驗測量精度的主要因素之一,該誤差是模型參數與實際值存在偏差引起的。故而今后對折射修正模型進行完善,以獲取準確性更高的模型參數組合,從而構建更精確的折射修正模型。3)研發自動化補光模塊。拍攝過程中光照強度過強或過弱會導致拍攝的圖像曝光過度或曝光不足,影響圖像的成像質量。因此,有必要研發配備自動化補光模塊減小外部環境所致誤差。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03