基于毫米波雷達的全天候料高和安息角測量技術
2023-01-16 12:58:30劉志明
港工技術 2022年6期
關鍵詞:測量
姜 波,劉志明,沈 閱
(1.唐山曹妃甸煤炭港務有限公司,河北唐山 063200;2.河北燕大燕軟信息系統有限公司,河北秦皇島 066004)
引言
隨著控制技術和檢測技術的不斷發展,工業的自動化程度越來越高,尤其散雜貨港口的全自動堆取料成為最近的研究熱點[1]。實現堆料機的自動化堆料,首先需要實時獲取料堆的安息角和料高,以便及時自動地實現堆料機大臂的俯仰和落料點的更換。自動化精準的堆料可以減少操作人員勞動量,提高堆場的利用率以及落料過程中縮減落料口和料堆的距離以減輕對環境的污染。在全天候堆料過程中,為了保證能夠實時獲取料堆的安息角和料高,采用毫米波雷達測量料高和安息角的方法。
在散雜貨堆場中,散雜貨的貨物主要有塊狀、顆粒狀、粉末狀的貨物,如礦石、煤炭等[2],在物料自然下落堆料的過程中,它們顆粒的大小、種類和干濕程度都會使料堆產生不同的安息角,在自動化堆取料的過程中,堆料機需要根據料高切換堆料點,根據安息角和料高進行實時的三維建模,因此,實時測量各種不同材料料堆的安息角和料高至關重要。
目前,在實際的自動化堆料過程中,實時檢測料堆高度和安息角的方式主要有三種,分別是采用紅外的方式、單線激光雷達的方式和視覺的方式[3]。紅外測量的方式局限于散雜貨堆場中物料的種類,比如黑色的煤炭無法測量,實用性比較差。單線激光雷達的方式受限于雨雪和粉塵的影響,無法全天候長時間的工作,需要占用勞動力隨時準備進行雷達的清潔工作[4]。視覺的方式不適合散料堆場二十四小時工作的情況,在夜晚的工況下受限于光線的影響,實際使用效果較差[5]。采用毫米波雷達的方式能夠實現全天候的不同散雜貨的安息角和料高的測量[6],該方法不受限于光照、粉塵、灑水、雨水和散雜貨種類的影響,能夠全天候的工作,更加準確、客觀的獲取料堆的數據。在實際工作中,堆料機在作業過程中有很多影響因素造成測量誤差,例如落料口的落料對檢測的影響,落料在料堆表面滑動的影響,堆料機抖動的影響等,這些因素使得測量工作更加困難,本文所述的方法能夠很好的解決這些問題,在現場測試和運行的過程中能夠獲得精確的測量結果,因此本文所述方法的實用性很高,可以實現工業現場的應用,實現安息角和料高實時測量的目的。
1 基于毫米波雷達的測量系統
基于毫米波雷達數據處理技術的堆料機堆料過程中實時測量料高和安息角的方法共分為四個步驟。步驟一在堆料過程中,利用堆料機落料口前面的毫米波雷達獲取料堆表面的二維數據;步驟二對步驟一中所得到的毫米波雷達坐標系的二維數據進行坐標系的轉換;步驟三利用隨機采樣一致性擬合直線的算法對步驟二中所得到的二維數據進行處理,得到直線方程,獲得安息角和料高;步驟四利用卡爾曼濾波的算法對步驟三中所得到的安息角和料高進行處理,得到濾波后的安息角和料高;料高和安息角測量過程如圖1 所示。

圖1 料高和安息角測量過程
1.1 毫米波雷達測量裝置
毫米波雷達安裝在堆料機落料口兩側,堆料過程中,料渣飛揚造成測量環境惡劣,由于毫米波雷達具有的頻帶寬、波長短、體積小、功耗低和穿透力強等特點[7],其環境適應性較強,能夠避免堆料機作業料渣的影響;毫米波雷達坐標系Y軸與堆料機大臂中軸線保持平行并且指向遠端,X軸與大臂中軸線垂直并且指向地面,自身坐標系原點定義為O,堆料機的坐標系原點是堆料機的旋轉中心軸和堆場地面的交點,將其定義為O0,Y0軸與回轉中心重合并垂直于地面,X0軸始終平行于地面,X0O0Y0和XOY標系平面隨著大臂的旋轉而旋轉,對正在落料的料堆進行探測,同時通過編碼器獲取當前堆料機的俯仰角θ,基于毫米波雷達料高h和安息角β測量系統如圖2 所示。
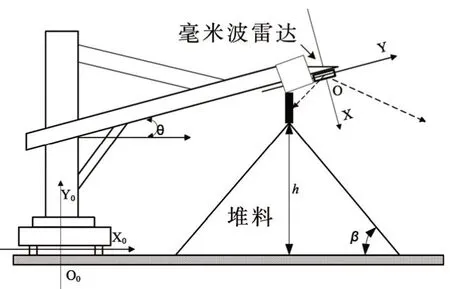
圖2 料高和安息角測量過程
1.2 測量數據坐標系轉換
對毫米波雷達坐標系的二維數據進行坐標系的轉換[9],得到在堆料機坐標系X0O0Y0中的二維數據;為了對堆場中料堆的安息角和料高進行測量,需要將料堆上的被測目標點P(X,Y)相對毫米波雷達坐標系XOY轉換到堆料機基坐標系X0O0Y0中,首先進行逆時針旋轉,通過編碼器獲取當前堆料機大臂的俯仰角,大臂水平時是零度,抬大臂俯仰角為正,降大臂俯仰角為負,旋轉角為90°加上堆料機當前的俯仰角,根據旋轉角進行旋轉,然后進行平移,已知毫米波雷達坐標原點沿大臂中軸線到堆料機旋轉中軸線的距離,旋轉中心到地面的高度,可以得到X和Y軸方向的平移量,最終經過旋轉和平移,得到在堆料機坐標系X0O0Y0中的二維數據。
1.3 料高和安息角測量原理
利用隨機采樣一致性擬合直線[8]對坐標系轉換后的料堆的二維數據進行處理,首先,設置迭代次數、每次采樣點數和容差值,通過隨機采樣兩個點,計算兩個點的直線方程,在容差范圍內,找出距離擬合直線容差范圍的點,并統計局內點的個數,所有的迭代完成以后,選取擁有局內點個數最多的直線L2為數據的擬合直線,直線斜率的反正切得到料堆的安息角β,落料點在堆場的橫坐標可以由俯仰角和落料口到旋轉中心軸的距離求出,得到L1,將橫坐標代入直線方程可得出實時料高h,實現堆料機堆料過程中安息角和料高的實時測量。

圖3 料高和安息角測量原理
1.4 基于卡爾曼濾波算法降噪
利用卡爾曼濾波算法對得到的料堆的安息角和料高進行處理,在堆料過程中,毫米波雷達的數據存在測量誤差并且堆料機會存在一定的抖動,對測量的結果造成嚴重影響,設置合適的測量噪聲方差和系統噪聲方差,經過卡爾曼濾波的處理得到平滑的安息角和料高的測量值,最終實現在堆料過程中實現安息角和料高的測量。
2 實驗分析
在河北省唐山曹妃甸煤炭港務有限公司的堆取料機的全自動改造項目中進行測試應用,如圖4和圖5 所示,料高和安息角的測量結果取自于堆料機的自動化堆料過程中,其測量結果穩定性較好,很好地為料堆的三維建模提供可靠的料高和安息角數據,實現全自動的料堆高度和安息角測量,為堆料機自動化換點堆料提供可靠的反饋信號。
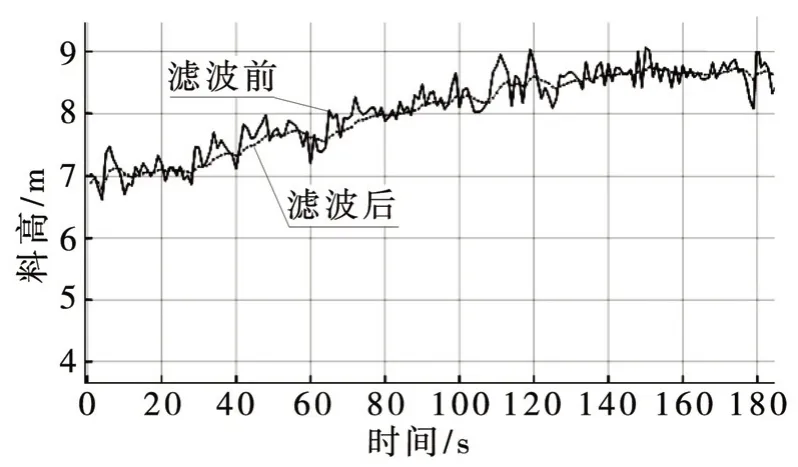
圖4 料高測量結果
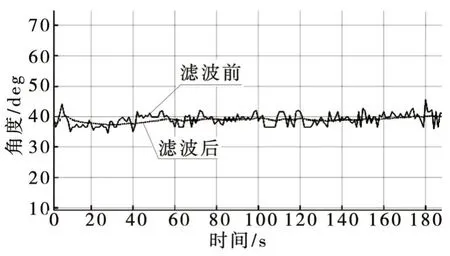
圖5 安息角測量結果
3 應用
曹妃甸煤炭港口自動化堆料項目和滄州礦石港自動化堆料項目中,采用了基于毫米波雷達測量得到的煤炭料堆和礦石料堆的料高和安息角。
3.1 測量料高的應用
如圖6(b)落料點切換示意圖,通過毫米波雷達實時測量料堆的料高,當料高滿足一定條件時,切換堆料點,例如圖6 堆料點8 的料高達到一定值時,堆料機將根據控制系統程序自動切換到堆料點9 的位置繼續堆料。
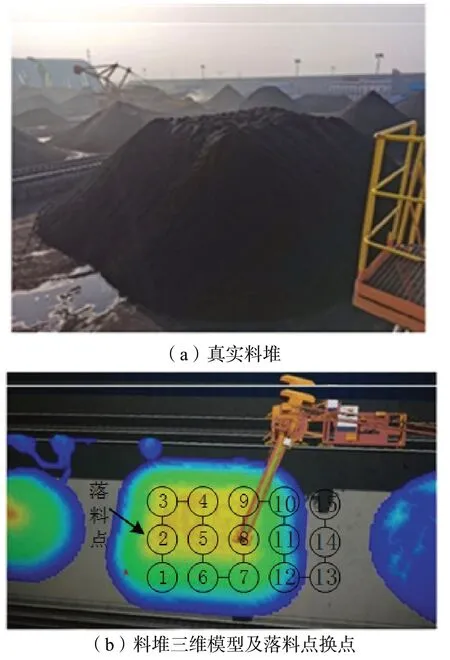
圖6 堆料機自動堆料換點及建模示意圖
3.2 測量安息角的應用
堆料機堆料的過程中依據物料的安息角進行三維建模,使得各種顆粒大小、濕度、粘度的物料都能更精準的三維建模。
4 結語
本文針對全天候實時測量料高和安息角的技術,采用基于毫米波雷達掃描技術得到料高和安息角,并成功應用到礦石港口的自動化堆取料項目中。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00