RTK 三維水深測量質量因素及其驗證
2023-01-16 12:58:32胡志渠
港工技術 2022年6期
關鍵詞:測量
胡志渠
(中交第一航務工程勘察設計院有限公司,天津 300220)
引言
RTK 三維水深測量實質是RTK 測量和水深測量相結合的測量模式,其主要質量因素由GPS RTK測量和水深測量各自相應的技術要求決定。RTK 測量通常使用的高程基準面和水深測量使用的深度基準面不相同,測量時需要對基準面進行統一。由于GPS 控制網通常布設在陸域,無法覆蓋海域,在海上進行RTK 測量通常存在GPS 控制網外推精度驗證問題。RTK 平面精度一般情況下能夠滿足水深測量定位精度要求,高程精度是否能夠滿足水深測量規范的要求,需要經過現場驗證,這對于海上RTK 測量的使用范圍受到了一定約束。
1 RTK 三維水深測量與傳統水深測量對比
RTK 三維水深測量是否可行關鍵看其測量精度是否能夠滿足水深測量規范要求。其中與傳統水深測量質量因素對比分析見表1。從表1 中可以看出RTK 三維水深測量的優點就是無需進行測量船舶吃水測定,無需進行波浪處理和潮汐改正,能夠大大提高作業效率。
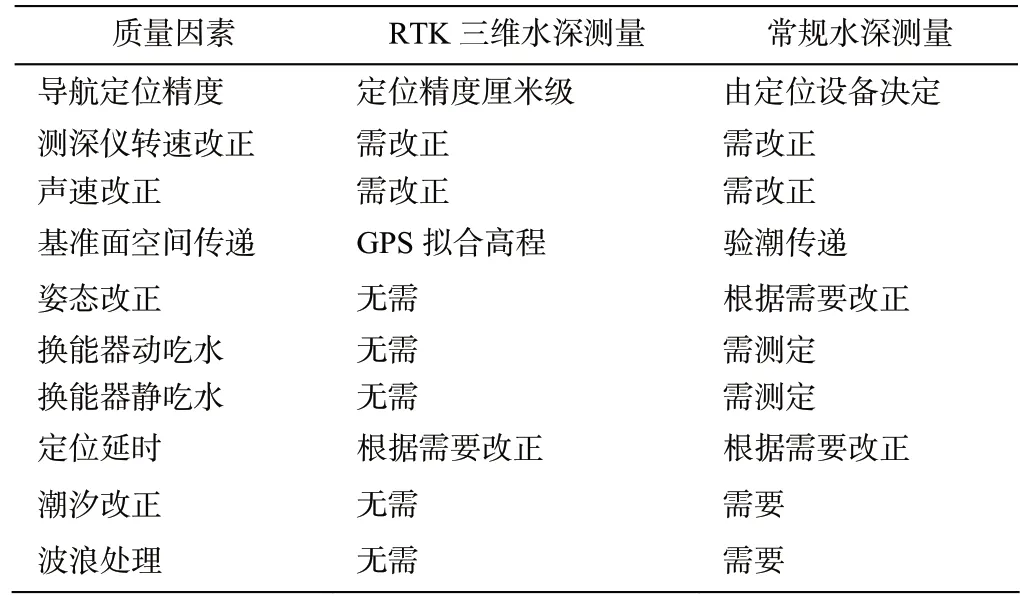
表1 RTK 三維水深測量與常規水深測量對比表
2 RTK 測量
RTK 定位技術是全球衛星導航定位技術與數據通信技術相結合的實時動態差分定位技術,基準站通過數據通信技術將導航衛星觀測值和測站坐標信息一起發送給流動站,流動站接收到基準站的數據,結合其同時采集的導航衛星定位觀測數據,在系統內組成差分觀測值進行實時數據處理,實時給出厘米級的三維定位結果。RTK 定位技術的誤差來源主要是整個衛星導航定位系統和差分電臺的數據傳輸技術。目前通過使用大功率電臺或者是GPRS 來傳送數據信號能夠輕松解決40 km 以內的覆蓋范圍。衛星導航定位技術已經很成熟,只是在使用RTK 定位時,要實現不同坐標系統下的坐標轉換是RTK 測量技術的一個關鍵問題。
RTK 測量坐標系統轉換的方法通常有四參數轉換法和七參數轉換法。坐標轉換的精度主要取決于控制點的覆蓋范圍和坐標精度。通常在控制點范圍內使用參數轉換坐標精度較高,在控制點范圍外使用參數轉換坐標的精度需要根據實際驗證情況來確定。海上水深測量區域往往是在控制點范圍外,屬于外延型,需要對RTK 外延后的測量精度進行驗證并合格后才能使用。
3 水深測量
傳統水深測量方法是使用水準測量方法計算得到水尺零點高程,使用回聲測深儀測出水面到泥面的距離,通過同步觀測水尺水位來改正測深數據,從而得到泥面高程。水深測量誤差來源主要有水位誤差、測深標稱精度、聲速誤差(包括水體聲速不均勻)、波浪影響(船舶姿態)、吃水誤差、定位延時誤差、海底底質差異產生的誤差、測深波束角及海底地形起伏的影響、船速效應。其中水位觀測誤差、聲速誤差、吃水誤差、波浪影響的偶然性比較大,人工參與環節多,容易對后續水深數據處理質量產生影響。
4 RTK 三維水深測量驗證
4.1 驗證依托工程概況
江蘇洋口港海域地處長江口以北,離岸約12公里,海區潮差大潮流急,海底地形變化復雜,非常適合驗證RTK 三維水深測量。從2006 年洋口港建設開始至今,對洋口港海域持續進行了20 多次的定期水深測量,積累了豐富的RTK 三維水深測量數據和經驗。水深測量區域覆蓋面積320 km2。測區東西長34 km,南北寬12 km,測量比例尺包括1∶10000、1∶5000、1∶2000、1∶500,測量方式包括單波束和多波束水深測量,測區最遠點在航道東端頭,距離陽光島RTK 基準站24 km,陽光島RTK 基準站距離陸地12 km。測區范圍見圖1。為了保證水深測量的精度和可對比性,固定每期水深測量的斷面線,同時采用RTK 三維水深測量和傳統水位控制的方法進行水深測量及數據處理。水深數據處理時采用1985 國家高程基準面。
4.2 驗證過程
1)GPS 控制測量及坐標轉換七參數求解
為了保證工程質量,本項目在定期水深測量前期按照C 級GPS 控制網技術要求進行了控制測量,陸域布設三個GPS 點,在距離陸地12 公里的洋口港陽光島布設1 個GPS 控制點(見圖1 所示),GPS 控制網最長邊長19 km,最短邊長9.2 km,平均邊長13.7 km,項目使用1954 年北京坐標系。各個控制點高程按照三等水準測量技術要求進行了聯測。在GPS 網平差后求取了坐標轉換布爾莎七參數(WGS84 坐標向1954 年北京坐標轉換)。
2)坐標轉換七參數精度驗證
為了確定轉換參數的精度和可靠性,我們進行了實測檢查。RTK 基準站布設在岸邊B04 點,檢查點分布在控制網區的中部、邊緣和控制網區外三個區域(包括兩個臨時潮位觀測站點)。陸域檢查點位置示意圖見圖1,實測檢查結果見表2。

表2 RTK 實測檢查結果表
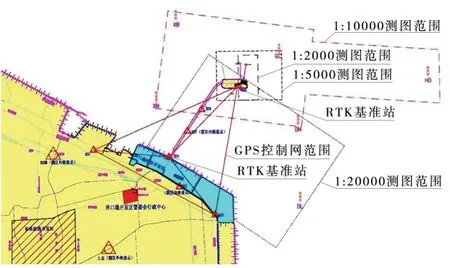
圖1 測區、實驗范圍及點位示意圖
3)RTK 三維水深測量驗證
按照圖1所示意的水深測量范圍和GPS網控制范圍,分GPS 控制網范圍內和GPS 控制網范圍外延區域進行RTK 三維水深測量與驗潮水深測量實測比對。外業施測RTK 三維水深測量和驗潮水深測量同時進行,即在RTK 三維水深測量的同時進行水位觀測。測量時GPS 天線和換能器安裝在同一測深桿上,精確量取GPS 天線至換能器的距離S(保持在3 m 左右),同時量取換能器吃水C。測量時保持6 節船速。具體安裝和量取位置見圖2。
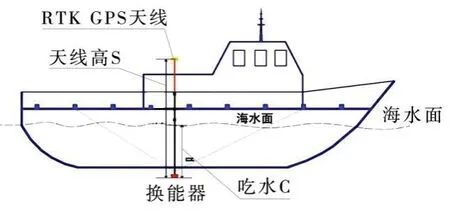
圖2 RTK 三維水深測量儀器安裝示意圖
測量時基準站嚴格按照規范要求設置,設置移動站GPS 輸出數據更新率為5 Hz,測深儀按照20 m間隔定標距離進行記錄,只記錄RTK 固定解。實測并計算測深改正值、GPS 延時、動吃水。在進行驗潮水深測量數據處理時先對水深數據進行手工消除波浪處理,然后按照雙站或者三站水位進行改正。在進行數據對比時保持水深點采集位置相同,統計二者的水深數據結果見表3、表4。
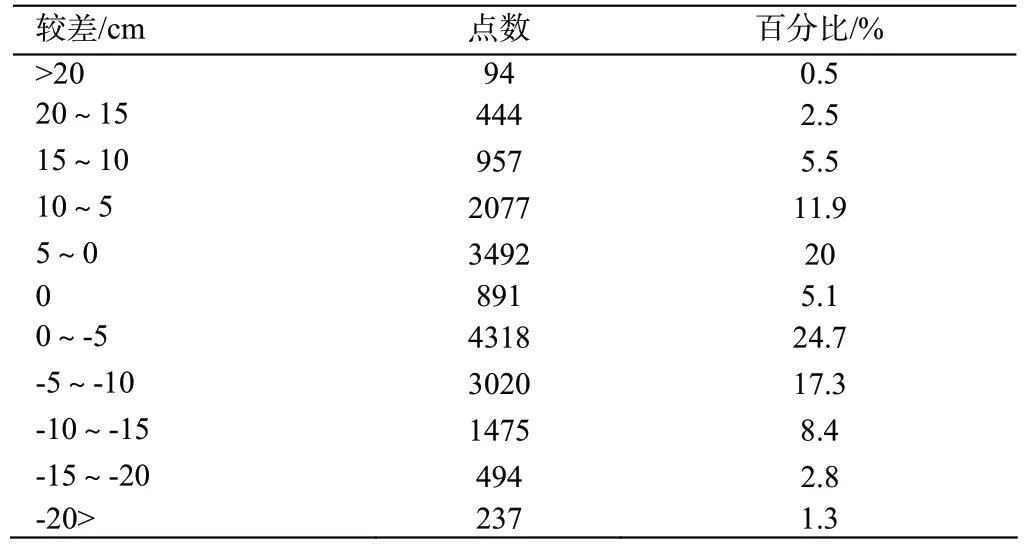
表3 RTK 三維水深與驗潮水深差值對比表(外延區)

表4 RTK 三維水深與驗潮水深差值對比表(范圍內)
根據表3 和表4 統計水深較差在±20 cm 內點數占總數比均大于95 %,可信度高。個別點較差值大,其原因來自消浪處理產生的誤差。而RTK 三維水深測量數據處理則避免了上述影響。在GPS 控制網范圍內和外延區域使用RTK 三維水深測量沒有發現明顯的區別,說明在保證滿足GPS 控制網七參數的正確性和RTK 高程測量的規范要求后,完全可以使用RTK 三維水深測量。
5 RTK 三維水深測量質量控制
根據以上驗證過程及成果,總結出RTK 三維水深測量時候的質量控制需要遵循以下幾點:
1)需要有一定控制范圍的坐標轉換七參數,且高程擬合精度要滿足規范要求。
2)按照規范要求的RTK 測量條件嚴格控制操作過程,進行必要的RTK 檢查驗證工作。
3)RTK 三維水深測量適合固定基準面(如85國家高程基準、日照港理論最低潮面等)的水深測量,對于使用當地理論最低潮面的水深測量,必須通過驗潮來確定基準面的變化量(相對于平均海平面)并進行相應的基準面改正。
4)GPS 天線和換能器應安裝在換能器桿兩端,且距離不宜過長(宜控制在3 m 以內),過長的天線容易引起RTK 高程和平面位置產生較大誤差。
5)RTK 三維水深測量為全數字水深測量,GPS定位坐標輸出頻率5~10 Hz(規范要求更新頻率不低于10 Hz,根據目前國內常用測深導航數據采集設備的性能,難適用到10 Hz,高了容易引起數據無規律的擁堵),且應該進行延時檢查校準。有條件的可以采用帶有1PPS 輸出的GPS RTK 和相應數字測深系統及數據采集軟件來解決延時問題。
6)水深測量時應該間隔2 小時對RTK 流動站進行一次初始化。RTK 三維水深數據處理時應當檢查RTK 水位是否存在異常。測量過程中確保流動站始終保持固定解,如果衛星或差分信號失去鎖定時間過長,應立即停止測量。
7)RTK 三維水深測量的有效范圍還與RTK 差分信號的作用范圍密切相關,根據經驗,目前常用RTK 差分電臺通訊距離在海上15 km范圍內能夠保持穩定。如果增高基準站差分天線的高度和差分電臺的功率可以增加RTK 差分電臺的通訊距離,最遠可達到30 km。但是在GPS 控制網外推距離越遠處的高程精度越難保證,應適當控制外推距離,宜控制在20 公里以內。
8)利用Cors 站信號進行RTK 三維水深測量,在陸地距離無限制,但是在海上網絡信號差,容易失鎖,有效作用范圍小。
6 結語
通過工程現場的實際應用和研究分析,總結出了RTK 三維水深測量質量控制關鍵點(質量因素),在今后的RTK 三維水深測量工作中,使用以上工程經驗,可合理安排測量內、外業工作,細化作業過程,既能節省時間又能保證工程質量,既提高了工作效率又能節省生產成本,未來的經濟效益切實可待。同時經過工程項目的實地驗證和總結,為今后繼續補充完善RTK 三維水深測量的規范內容提供了切實的依據,為行業的科技進步和持續發展提供了基礎支持。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00