自主可控可編程控制系統架構與關鍵技術
2023-02-06 14:07:18范大鵬陳凌宇王曉宇吳繼春
光學精密工程 2023年1期
關鍵詞:功能
范大鵬, 陳凌宇*, 王曉宇, 吳繼春
(1.國防科技大學 智能科學學院,湖南 長沙 410073;2.華中科技大學 機械科學與工程學院,湖北 武漢 430074;3.湘潭大學 機械工程學院,湖南 湘潭 411105)
1 引 言
以嵌入式計算機(IPC)、可編程邏輯控制器(PLC)、現場總線控制系統(FCS)為代表的可編程控制系統(PMC)作為實現各類工業裝備自動化的“大腦”和“神經”,是現代智能工廠中實時控制、信息采集、過程監控管、安全保障與防護等設備不可或缺的共性基礎控制部件,廣泛應用于數控機床、機器人、自動化生產線等自動化裝備中[1-2]。作為全球最大的制造業基地,我國市場上95%的可編程控制器產品被國外品牌壟斷[3],國內裝備制造業嚴重依賴國外控制器產品,產業升級面臨著國外的掣肘,存在嚴重的市場隱患。迫切需要提高工業控制基礎部件產品的自主化率,以保障高端制造裝備的運行的本質安全。
可編程控制系統涉及機械、電子、自動化、計算機軟硬件等多個學科,由嵌入式主機(主站)、實時現場總線、總線控制組件(從站)、軟件集成開發環境(Integrated Development Environment,IDE)、人機交互(HMI)軟件等技術構成相互依存的技術生態鏈條[4]。歐美發達國家在可編程控制技術領域經過多年的技術積累,已經有了成熟的系列產品,利用專利、標準、規范構筑了嚴密的技術壁壘,使可編程控制系統的自主可控研發門檻很高。國內相關高校和企業在核高基、高檔數控機床及基礎制造裝備等國家重大專項支持下,在國產操作系統、工業以太網總線、高性能IPC及測控模塊等一些關鍵技術上取得了一定成果[5-7],但是尚未形成完整的關鍵技術鏈條和研發生態。
國內研發的可編程控制系統主從站硬件大多數采用定制化模式。針對專用的機電系統設計,標準化、模塊化程度不高,系統底層硬件構成差異大,互換性及互聯互通性不強,研制與批產成本高。在軟件方面,IDE是用戶進行編程、調試、下載等操作的重要工具,涉及實時操作系統、應用層協議棧、可視化編程、代碼庫生成和管理、HMI組態等多個方面,難度和工作量極大[8-10]。這類軟件被3S,KW-Software等國外軟件廠商壟斷,國內自動化廠商還不能提供完整的軟件開發平臺,嚴重制約了自主可控可編程控制系統軟件的發展。
現場總線是實現可編程控制系統主從站數據高速、可靠傳輸的重要橋梁。由于制造裝備對數據傳輸實時性及同步性要求的不斷提高,以EtherCAT,Profinet,POWERLINK為代表的實時以太網總線成為可編程控制系統的標配[11]。這些總線廠商通過出售集成通信協議的專用ASIC芯片來授權總線的使用,嚴重影響工業控制系統的信息安全。以EPA總線[12]、NCUC總線[13]、EtherMAC總線[14]等為代表的國內實時以太網總線,對標準IEEE802.3鏈路層進行修改,在FPGA中集成鏈路層協議,初步形成了自主可控的實時以太網總線。但功能完善程度和整體實時性能與國外先進總線仍然具有一定差距[15]。
目前,我國可編程控制系統研發面臨的主要問題為:(1)技術體系復雜,國外技術壁壘高筑;(2)碎片化的技術研究,尚未形成各項關鍵技術研發生態;(3)工業軟件開發難度大,需要長期的技術積累來形成軟件數字資產;(4)總線技術面臨升級改造,迫切需要掌握高性能總線接口技術;(5)缺乏面向嵌入式應用的國產工業級CPU,FPGA芯片。
本文通過分析可編程控制系統的發展過程和技術體系,提出一種總線式可編程控制系統構成方案。以實現自主可控為目標,對方案中的主從站標準化、實時以太網總線及應用層協議、軟件集成開發環境及人機界面、符合PLCopen規范的軟件功能庫等的原理和關鍵技術進行分析說明,最后從建立研發技術生態角度提出了各關鍵技術的解決思路和方法。
2 可編程控制系統架構分析
2.1 可編程控制系統發展歷程
自20世紀60年代開始,隨著微電子、計算機、信息處理等技術的發展,數字控制系統逐漸替代模擬控制系統,可編程工業控制系統開始登上歷史舞臺。這類系統主要經歷了集中式控制系統(Centralised Control System, CCS)、分布式控制系統(Distributed Control System, DCS)、總線式控制系統(Fieldbus Control System, FCS)3個發展階段[16],如圖1所示。集中式控制系統是由一臺主機作為核心控制單元,通過計算機板卡擴展外部通用信號接口,對系統中各個外設進行直接控制的系統。由于采用單個控制器單元,外設數量、控制算法復雜程度等因素的增加,導致系統處理能力受到限制。
分布式控制系統以微處理器為基礎,將由主機實現的控制功能分散到各個子控制器模塊中,使子控制器模塊具有較強的局部處理功能,主機用于完成協調控制功能。其特點在于對系統采用集中管理,各外設通過子控制器分散控制。這種分布式結構能夠提高系統工作的可靠性,但存在硬軟件標準化程度不高,不易實現開放互聯的問題。
總線式控制系統則主要依托于各種工業現場總線,系統主機(站)通過總線通信管理的方式對總線上的從站外設節點進行實時控制和管理操作,實現在標準通信協議下各功能模塊的開放式互聯[17]。這種集計算技術、總線技術與控制技術為一體的開放式工業控制系統體系架構,相比CCS和DCS,在系統可靠性、使用靈活性、功能多樣性、架構開放性、設備成本等多個方面都具有較大的優勢。尤其是實時以太網技術在現場總線中的廣泛應用。當前,基于實時以太網總線的FCS已成為工業過程控制與裝備自動化領域可編程控制系統的主流架構。
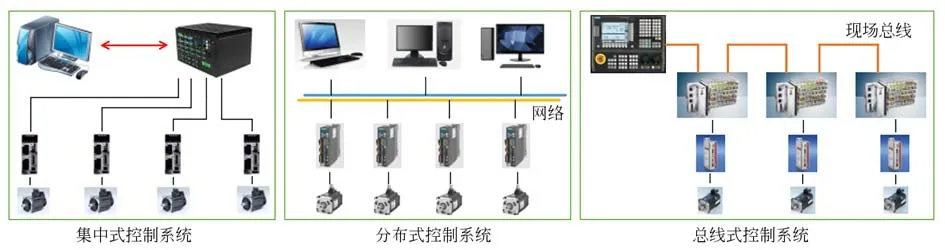
圖1 可編程控制系統發展階段示意圖Fig.1 Schematic diagram of programmable control system development stage
2.2 可編程控制系統發展架構特點
早期的可編程控制系統大都采用相對封閉的硬軟件結構。在硬件上,采用專用的IO控制模塊、電源模塊和專用的中低速總線,硬件模塊定制化程度較高,缺乏兼容性。軟件上,各廠商都推出了各自的軟件開發環境且都采用梯形圖、語句表等編程語言,但其組態方式、尋址空間、語言結構等均有較大不同。總線上,各大廠商使用的總線及協議不盡相同,如西門子的Profibus,三菱的CC-Link、貝加萊的Powerlink、施耐德的Modbus-IDA等總線。各廠商的可編程控制系統硬軟件互不兼容,具有較高的技術壁壘,嚴重阻礙了總線技術發展和不同廠商產品的互聯互通。
FCS具有現場總線及協議標準化、從站節點控制器模塊化、邏輯與運動控制編程開發環境集成化、系統互聯開放化等特征。這些特征使得可編程控制系統的結構和功能由過去的封閉式走向開放式。當前,總線式可編程控制系統的架構和開發應用具有以下主要特點:
(1)在總線方面,采用具有高同步性能的實時以太網總線及標準化應用層協議。在符合IEEE802.3規范的以太網物理層接口的基礎上設計適應工業控制的鏈路層數據傳輸協議,使它具有高的實時和同步性能,是實時以太網現場總線接口技術研制的核心內容。當前,應用較廣的實時以太網總線有Ethernet/IP,EthernetPowerlink,Profinet,及EtherCAT等。這些總線的物理層、鏈路層均采用通用以太網接口標準,主要區別在于網絡層、傳輸層實現實時性的方法。其實時控制周期可小于1 ms甚至100 μs,同步性能也能達到100 ns以內[18],為可編程控制系統的總線選擇提供了較大的空間。
應用層協議用于屏蔽總線物理層、鏈路層差異,為用戶層提供統一的總線讀寫操作服務接口。應用層協議及協議棧對總線式可編程控制系統的主站、從站用戶程序設計有直接的影響。在眾多應用層協議中,CANopen 協議是一種占有重要地位的標準,該協議由CiA(CAN-in-Automation)組織1992年發布,其主要特點是通過“數據字典(Object Dictionary,OD)”對工業控制系統中各節點設備的功能和網絡行為進行描述[19]。依靠CANopen 協議的支持,主機可通過總線對不同廠商的CANopen設備進行靈活配置。將CANOPEN協議與實時以太網相結合,形成了不同類型的實時以太網應用層協議,如Powerlink,COE(CANopen over EtherCAT)應用層協議等。
(2)在系統硬件方面,主站和從站越來越通用化。總線式可編程控制系統一般由主站和多個測控從站通過實時以太網總線連接構成。對主站總線接口硬件而言,可直接采用標準以太網卡或集成在嵌入式主板上的通用以太網控制器,因此主站有較大的選擇余地。但對于從站而言,則需要通過專用實時以太網總線接口芯片來實現從站處理器對總線數據的收發操作。隨著總線接口芯片技術的日臻成熟,用于實現數字量IO、模擬量輸入輸出、編碼器檢測、運動控制、伺服驅動等現場測控功能的從站與實時總線的數據交換不再困難。這也促進了從站標準化、通用化程度的提高,具有實時以太網接口的從站類型、規格會愈加豐富,性價比會不斷提升,使未來可編程控制系統的從站硬件選擇和系統構建過程變得更加簡單快捷。
(3)在編程開發工具軟件方面,功能更加豐富。總線式控制系統的工具軟件主要涉及自動化編程和人機交互界面編程兩個方面。自動化編程軟件是一種用于工控語言編程調試的集成化開發平臺,能夠按照IEC61131-3國際標準規定 的 指 令 表(IL)、梯 形 圖(LD)、功 能 塊 圖(FBD)、結構化文本(ST)和順序功能圖(SFC)5種編程語言進行邏輯控制、運動控制程序的混合編程和在線調試[20]。人機交互界面編程軟件主要用于總線式控制系統內部狀態數據顯示和外部指令等人機交互方式的設計。這兩種軟件相輔相成,共同決定著工控系統編程的質量和效率。編程開發工具軟件已成為衡量可編程控制系統技術水平的重要標志。目前,應用較多的編程工具軟件主要以德國的產品為主,如3S公司的CoDeSys3、KW公司的KW-Software、西門子公司的SIMATIC WinAC、倍福公司的Twin-CAT3等。這些工具軟件具有多語言混合編程、實時多任務、仿真與在線調試、支持Modbus 接口協議、能支持多種總線類型、硬軟件擴展性好等共性特點。這些功能特點涵蓋了控制系統項目在編程、調試、管理、維護等各個階段所需的軟件開發及協同管理工作,使得編程標準化和可移植性顯著提高,在同一個工具軟件平臺通過控制邏輯和人機交互界面的“軟件組態”就能進行可編程控制系統的快速可重構開發,實現完整的自動化解決方案,還會顯著降低人力、研發、培訓和技術支持的成本。
(4)在應用軟件開發方面,IEC61131-3語言和PLCopen規范相結合成為主要的標準化開發樣式。在以IEC61131-3語言編程調試為基礎的集成化開發平臺上,采用IEC61131-3的5種編程語言以及與C/C++的混合編程可以靈活實現對被控設備對象的邏輯、運動、安全等控制功能的軟件開發。但在制造機床、工業機器人等需要多軸伺服電機高精度協同控制的高端裝備應用場合,所設計的應用軟件在一定程度上仍存在對系統硬件依賴性強、開發標準化程度不高、繼承復用性不理想的問題。針對某類工業裝備的控制應用需求,基于PLCopen規范,通過IEC61131-3編程語言進行運動控制、工藝過程控制、安全控制等應用軟件功能塊的標準化開發,進而建立該類裝備運行控制的完整軟件功能塊庫,已成為當前可編程控制系統應用軟件研究的主要技術途徑[21]。對應用軟件開發者而言,通過調用功能塊即可快速實現對裝備的復雜運動控制。所開發的功能塊庫具有與主從站硬件的依賴性低、工藝知識封裝與隱藏性好、便于跨平臺復用、易于智能化升級的特點。隨著硬件成本的不斷降低,可編程控制系統的核心技術競爭力主要表現在功能塊庫的差化方面。作為“軟件定義機器”理念的具體實現樣式,這些功能塊庫也將成為未來企業的重要數字資源和提高自身市場競爭力的主要內容。
(5)在系統應用方面,開放性互聯能力不斷增強。與工業現場的設備和傳感器直接連接,獲取各類現場設備的工作狀態數據,實現設備的自動化控制,是可編程控制系統的主要任務。但隨著企業信息化、智能化水平的提高,迫切需要將部分有價值的現場數據傳輸至上層MES/ERP管理系統,以實現車間、企業,以及更高層級的設備運營決策優化。特別是工業互聯網、智能制造和大數據技術的運用,對總線式可編程控制系統的開放互聯性能提出了更高的要求,但現有總線系統間的應用層協議差異較大,難以滿足需求。如何直接獲取現場數據的優勢,嵌入IT接口和安全訪問技術,實現開放式互聯,已成為可編程控制系統發展的一個重要特點。OPC基金會提出的統一架構(OPC UA)模型作為一種自動化領域的數據交換互操作性標準,可以實現制造管理系統中現場設備、車間、企業、云端等層級間數據的高安全性無縫數據交換,是近年工業4.0和工業物聯網領域的研究熱點之一[22]。特別值得關注的是,OPC UA與PLCopen兩個國際組織在OPC UA信息模型和IEC61131-3功能結構模型的合作,通過IEC61131-3語言來搭建符合OPC UA規范的數據交換模型,并提出了PLCopen OPC-UA規范,開發了OPC UA客戶端功能模塊,使得可在PLCopen編程開發環境下通過客戶端功能塊調用即可方便地實現與系統內其他設備的數據交換。
2.3 總線式可編程控制系統技術體系
多年來,在核高基、高端數控機床及基礎制造裝備等國家重大專項的支持下,國產化CPU、FPGA芯片、操作系統軟件等硬軟件技術已取得長足進步。國產元器件產業化能力顯著增強,使可編程控制系統的硬件電路設計有了更大的選擇空間。在高性能運動控制系統、工業編程軟件和HMI軟件開發等方面,我國已掌握一批關鍵技術,并具備了可編程控制系統自主可控研究的基礎條件。
典型的總線式可編程控制系統構成如圖2所示。其中,嵌入式計算機(主站)通過實時以太網總線將節點控制器(從站)進行連接并組網。在符合IEC61131-3標準的集成開發環境(IDE)中編寫邏輯和運動控制程序,經過編譯后下載至主站。主站運行過程中根據代碼的執行流程,在程序組織單元(POU)中向各從站發送控制指令。各從站在接收主站控制指令后,控制相應的末端設備并采集設備狀態信息通過總線返回至主站。人機界面(HMI)組態軟件用于人機交互方式設計,實現系統指令輸入和各從站狀態數據顯示。由此可知,嵌入式主站、實時以太網總線、各種功能類型從站、IDE以及HMI組態軟件等5個方面的硬軟件共同構成了可編程控制系統的產品生態體系。

圖2 FCS系統構成原理Fig.2 Schematic diagram of FCS system composition
研發可編程控制系統的核心就是對圖2中典型系統各構成部分的相關技術進行攻關。
圖3為總線式可編程控制系統涉及到的相關技術。除硬軟件關鍵技術以外,圖中還增列出了安全設計技術。這是因為隨著裝備信息化、智能化的發展,控制和信息互聯程度越來越高,裝備運行面臨更多安全威脅,對可編程控制系統的安全性功能提出了更高的要求。安全總線、安全控制、安全從站、安全伺服驅動、安全設計軟件和智能安全等技術已成為未來高端可編程控制技術和市場競爭的焦點[23]。為提高市場競爭力,必須高度重視可編程控制系統的功能安全和信息安全問題的理論和關鍵技術研究。

圖3 總線式可編程控制系統技術架構Fig.3 Technical architecture of fieldbus programmable control system
總線式可編程控制系統研發涉及機械、微電子、計算機、控制等多個學科,共同構成了技術生態鏈條。單在鏈條中的某一環節進行研究,很難取得技術突破,形成完整的系統級產品。必須在整個技術生態鏈條上的各個環節同步持續發力,實現系統內主站、總線、從站硬件和集成開發環境、HMI組態軟件開發等成套關鍵技術的整體突破,才能真正具備可編程控制系統的自主可控研發能力。
3 總線式可編程控制系統自主可控關鍵技術
總線式可編程控制系統研制涉及技術生態鏈條長、關鍵技術復雜,需要長期的技術積累。
3.1 自主可控研發的技術途徑
總線式可編程控制系統自主可控研發的內涵與目標是:基于國產CPU、操作系統等基礎芯片和軟件,圍繞主站、總線、從站硬件和集成開發環境、HMI組態軟件等總線式可編程控制系統技術鏈條中的關鍵環節開展全面的研究,建立較完備的研發生態,形成具有自主知識產權的核心技術成果,在硬軟件設計、加工檢測、運行維護等方面具備獨立可控、不受制于人的研發能力。圖4為我們開發的總線式可編程控制系統構成示意圖。
在系統主站研發方面,硬件上采用集成國產CPU,SOC等芯片,具有標準以太網口、串口、GPIO等外設的嵌入式主板,軟件上采用國產實時操作系統。
在從站研發方面,硬件上以國產SoC芯片為核心控制器件,根據數字量IO、模擬量AD/DA、伺服控制、通信轉換等控制功能的需求,進行不同類型外設電路的設計。為減少硬件資源的占用率,提高運行實時性,從站不安裝實時操作系統,對CANopen協議棧、總線控制器接口操作、外設底層操作均采用C/C++直接編寫。
在實時以太網總線控制器方面,實時性和同步性是衡量總線式可編程控制系統數據傳輸性能的核心指標。在物理層符合以太網物理鏈路標準IEEE802.3的條件下,實時性和同步性主要取決于介質訪問控制子層(MAC層)的數據交換速度和交換方式。因此,須根據控制過程的實時與非實時數據傳輸特點,設計能在FPGA或ASIC芯片上運行的網絡數據收發鏈路層傳輸協議IP核,才能保證網絡幀的實時傳輸和同步性能。
在軟件IDE方面,以國產實時操作系統為基礎,對開源的IEC61131-3 IDE的架構及原理進行剖析,提出包含IDE和主站運行環境(Runtime)的編程開發環境構件方案,并開展硬件組態配置、IEC61131-3編程、CANopen協議棧、C代碼轉換、程序下載及調試、HMI數據訪問等功能插件的研究,以實現IEC61131-3五種編程語言的可視化開發。
在人機交互界面HMI組態軟件方面,HMI是可編程控制系統的“窗口”,用于實現系統狀態的實時監視和控制,起著人機交互顯示操控的重要作用。HMI功能的實現主要取決于運行于控制系統內部的數據訪問機制的有效性和顯示操作控件設計的快捷性。前者一般采用MODBUS數據交換協議在主站中通過軟件功能插件的形式實現,后者則可借助通用的HMI組態軟件進行快速開發。
在PLCopen功能塊庫開發方面,首先開展基于PLCopen規范的運動控制功能庫架構設計和快速開發方法的研究,以掌握基于IEC61131-3編程語言的運動控制、安全控制等PLCopen功能塊的標準化開發方法,進而具備能對典型裝備運動過程進行建模分析和功能塊庫快速研制的能力。

圖4 總線式可編程控制系統構成示意圖Fig.4 Schematic diagram of autonomous PMC system
3.2 主從站硬件標準化
主站是可編程控制系統的“大腦”,用于完成邏輯與運動控制功能執行、從站任務調度與管理、總線實時數據傳輸、HMI界面通信等任務。主站對外接口單一,以網絡通信為主。以國產X86架構的處理器芯片為核心的嵌入式計算機平臺就可以實現主站功能。目前,性能優越的嵌入式國產CPU處理器芯片主要包括飛騰系列、龍芯系列以及申威系列等[24]。為了充分發揮國產處理器的性能特點,需對國產CPU硬件環境的信號完整性、功能模塊與CPU通信接口、基于現場總線的系統運行問題進行優化。主站的硬件架構如圖5所示,包括主控CPU、電源模塊、USB設備輸入接口、HDMI顯示輸出接口、SATA硬盤接口、DDR3內存單元、兩路獨立的標準以太網接口、RS232通信接口、CAN總線接口和GPIO接口等。
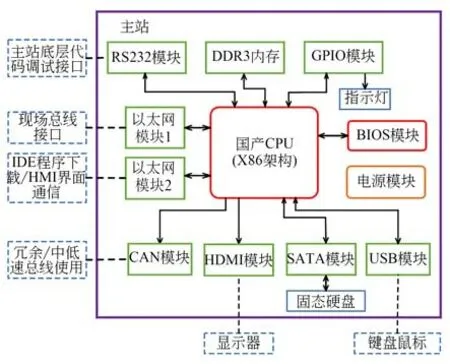
圖5 主站硬件架構Fig.5 Master station hardware architecture
從站作為工業現場末端設備的控制器,接收現場總線指令,直接控制對不同類型的工業現場末端設備進行狀態信息采集。根據外部設備控制原理、接口類型等差異,在通用的處理器電路和通信電路基礎上,設計針對不同外設的電路結構是實現從站模塊化開發的有效手段。通過對設備控制模型的分析與整合,設計了具有開關量輸入輸出的數字量IO從站、具有模擬電壓、電流采集與輸出的模擬量IO從站、集成伺服控制算法的運動控制從站、具有現場總線與其他通信方式兼容的通信轉換從站。從站采用集成Cortexm3內核的國產SoC芯片作為從站主控單元,在國產大容量FPGA中集成現場總線協議,形成從站主控和通信相關的硬件架構。模塊化的從站硬件結構如圖6所示。

圖6 從站硬件架構Fig.6 Schematic diagram of slave station hardware
3.3 實時以太網總線控制器
實時以太網總線是FCS控制系統的基礎,是實現系統整體連接的關鍵“橋梁”。目前,典型的實時以太網總線如EtherCAT,POWERLINK和PROFINET,是在以太網物理鏈路標準IEEE802.3的基礎上,保留物理層接口與傳輸線路,修改了數據鏈路層的MAC子層數據傳輸協議,使數據傳輸獲得實時性[25]。因此,采用國產核心器件搭建標準的以太網硬件平臺,針對工業控制過程中實時與非實時數據的傳輸特點,設計網絡數據收發鏈路層協議、網絡幀實時傳輸、通信同步等方法,是實現實時以太網總線自主可控的關鍵。
使用Verilog語言對實時以太網鏈路層協議進行開發,并封裝成IP核集成在國產FPGA中作為總線控制器,可縮短開發時間,便于升級、維護。設計的總線控制器模塊如圖7所示,主要包括2路獨立的MII接口模塊、數據訪問接口、寄存器模塊、通信控制模塊和同步控制模塊。其中,MII接口模塊用于控制100 Mb/s通用型PHY芯片,進行網絡底層數據收發;數據訪問接口用于總線控制器與從站主控芯片之間數據傳輸,主要包括對總線控制器進行配置、讀取總線控制器中接收到的網絡數據、將外設狀態信息寫入總線控制器后發送至主站、產生通信中斷及同步信號;寄存器模塊用于存放總線控制器信息、配置、通道數據等參數;通信控制模塊對通信過程中產生的過程數據(周期傳輸)和服務數據(非周期傳輸)進行獨立的通道管理,以實現數據交換的準確性與實時性;同步控制模塊集成基于IEEE1588精準時鐘同步協議,計算網絡通信幀在各從站間傳輸的延時并進行補償,通過數據訪問接口的SYNC信號,產生精準的同步信號。
圖7為實時以太網總線數據傳輸原理。主站發送以太網數據幀至從站以太網接口1,總線控制器的MII接口模塊1將網絡幀數據讀取后由通信控制模塊處理后存放在寄存器模塊中。此時,數據訪問接口根據同步控制模塊產生通信中斷信號和同步信號。從站主控芯片通過數據訪問接口將總線控制器接收到的數據讀出,通過協議轉換模塊將鏈路層協議轉換為應用層協議后送入應用層協議棧。協議棧更新對象字典中數據,控制設備操作模型對外設進行控制。外設狀態參數由傳感器采集后寫入對象字典,并通過協議轉換后存入總線控制器的寄存器模塊中。在以太網數據幀抵達總線控制器時,通信控制模塊將寄存器中外設狀態參數寫入網絡幀并由MII接口模塊2發送至總線。

圖7 實時以太網數據傳輸原理Fig.7 Schematic diagram of real-time Ethernet data transmission
3.4 基于IEC61131-3的可視化編程與調試
IEC61131-3標準規定了PLC,DCS,CNC等系統的編程標準,包括IL,LD,FBD,ST,SFC五種編程語言。這種標準化編程方式簡化了邏輯和運動控制代碼編寫的過程,改變了傳統基于C/C++等底層語言的繁瑣編程模式,使用戶能方便高效地進行應用程序的開發[26]。在國產操作系統或Linux操作系統中設計一套具有IEC61131-3邏輯和運動控制編程、代碼轉換編譯、調試與下載功能的IDE是可編程控制系統軟件自主可控的基礎。
構成IDE的功能組件主要包括硬件組態配置插件、IEC61131-3編程插件(GUI)、C代碼轉換插件、程序下載及調試插件。此外,在主站中集成代碼管理插件來實現主站與軟件集成開發環境之間的通信和管理,也是實現可視化編程調試不可缺少的環節。其中,硬件組態配置插件根據實際系統上從站數量、類型、對應的節點號等信息,形成整個系統的硬件連接關系,并生成系統組態文件,為主站實現網絡通信調度提供準確的設備信息。IEC61131-3編程插件根據生成的系統組態文件,采用IEC61131-3定義的五種編程語言,進行系統整體邏輯功能的編程操作。這五種編程語言各有其優勢,在編程時可采用一種或使用多種進行混合編程。C代碼轉換插件將設計完成的IEC61131-3邏輯代碼轉換為主站系統平臺可以執行的標準C代碼,為后續程序下載、調試等操作做好準備。由于ST的語法邏輯與C語言相似,插件首先將IEC61131-3其他語言轉換為ST語言,再將ST轉換為C代碼。程序下載及調試插件操作以太網接口,將生成的C代碼以及組態文件傳輸至主站用于程序下載/調試的網絡端口。在主站運行過程中與主站中代碼管理插件進行程序中的控制、狀態變量的實時通信,通過在線修改相關變量參數實現調試功能。代碼管理插件集成在主站程序中,實現與軟件集成開發環境中程序下載及調試插件的實時通信。此外,通過接收系統邏輯功能C代碼和組態文件,調用本地C/C++編譯器,生成主站程序框架內具有完成系統邏輯功能的可執行文件,并集成在主站程序組織單元中。
圖8展示了軟件集成開發環境結構以及編程調試流程。用戶在軟件集成開發環境中進行硬件組態和符合IEC61131-3的程序編寫后,通過網口將程序可執行的C代碼下載到主站中。主站的代碼管理插件對C代碼進行編譯,然后將可執行文件集成于主站POU中。最后,POU調用總線以太網端口進行總線通信,實現對系統各從站和末端設備的控制。

圖8 IDE功能原理Fig.8 IDE functional schematic
3.5 HMI組態編程
在可編程控制系統中,HMI組態軟件是一種可快速開發的工業自動化控制場景狀態監測、管理控制的可視化軟件,也是實現人機交互的重要工具[27]。HMI組態軟件由界面開發環境和HMI運行程序構成。其中,界面開發環境用于設計HMI界面顯示、圖形、通信等相關結構,HMI運行程序則是在目標平臺上實現最終HMI功能的程序。考慮到系統通用性和自主可控的需求,在通用的Windows/Linux操作系統中采用C語言在跨平臺軟件開發環境QT上進行HMI界面開發,在Linux以及國產操作系統中運行所生成的界面程序,實現了HMI組態編程軟件的跨平臺運行。
圖9為HMI組態軟件功能架構。界面開發環境運行在Windows操作系統中,用戶通過工程項目管理組件、系統參數配置組件、監控界面繪制組件、通信管理組件以及界面程序生成組件開發和設計符合實際控制需求的HMI界面。其中,工程項目管理組件可對HMI界面開發過程進行管理和優化;系統參數配置組件對所設計的HMI界面運行設備、界面的屏幕分辨率、界面的圖像刷新率等參數進行配置;監控界面繪制組件提供了HMI界面圖形和動畫的開發工具以及標準化的按鈕、開關等插件;通信管理組件定義了工業控制常用的通信協議如Modbus-TCP,Modbus-RTU等。在完成HMI界面開發后,在界面程序生成組件中整合所有相關的界面設計的結果文件,打包生成HMI運行程序,并通過以太網或USB將HMI運行程序數據下載到Linux/國產操作系統的程序運行平臺中。HMI運行程序在平臺中通過實時通信組件建立與主站的實時通信,對實時數據庫組件中的數據進行操作。同時,界面圖控組件會根據用戶的操作,實時地向數據庫中更新界面狀態。由此形成了基于實時數據庫的界面操作協議,實現了HMI組態軟件與主站的數據交換。

圖9 HMI組態軟件框架原理Fig.9 Schematic diagram of HMI software framework
3.6 PLCopen功能庫
PLCopen規范是一種不依賴硬件框架的標準化、規范化的工業控制軟件編程方法,包括邏輯編程規范、運動控制規范、XML規范、安全規范及OPC-UA規范,如圖10所示。基于組件化的軟件復用思想,可將通用的功能塊進行組合設計并封裝成可實現被控對象復雜程序功能的模塊化程序單元[28]。用戶在編程時通過調用功能塊并定義邏輯連接、輸入輸出接口變量即可使用,大大提高了系統編程效率和資源利用率。在具有標準化硬件、總線、程序開發方法的FCS系統中,完善的、符合被控對象特性的PLCopen功能庫是高端可編程控制系統數字資產和軟實力的重要體現。

圖10 PLCopen規范構成Fig.10 PLCopen specification composition
在PLCopen規范中,運動控制功能的實現取決于三個基本要素:運動控制功能塊算法邏輯實現、軸狀態機以及軸信息結構體[29]。其中,運動控制功能塊主要實現運動控制相關的算法(如加減速規劃、電子凸輪、插補等)[30];軸狀態機則是描述軸當前的運動狀態以及可能存在的狀態跳轉關系;軸信息結構體則描述了被控軸的所有參數。圖11詳細描述了PLCopen功能塊的工作原理。在主站中根據運動控制基本模型建立軸狀態機,定義了電機軸的所有運動狀態以及各狀態之間的轉移關系。在IDE中利用IEC61131-3標準功能塊,開發軸狀態機中每個運動狀態對應的運控控制功能塊,從而形成完整的運動控制功能庫。由于運動控制從站中集成了基本的三環控制算法,所以PLCopen功能塊算法的原理是在時間軸下對從站三環控制的基本指令、模式等參數的邏輯和時序控制。因此,建立一個與從站軸控制相同并且反映軸運行所有信息的結構體,是網絡通信架構下PLCopen運動控制功能塊實現的核心。軸信息結構體的本質是從站對象字典中反映軸在運行過程中所有對象的集合,通過實時以太網總線對軸信息結構體與從站對象字典的實時更新,實現了運動控制功能庫的功能。

圖11 PLCopen運動控制功能庫實現原理Fig.11 Working principle of PLCopen motion control functions
4 結 論
本文針對工業控制和裝備制造領域的可編程控制系統自主可控問題,在工業控制系統發展歷程的基礎上,對當前流行的FCS組成架構、工作原理及相關技術進行了深入分析,提出了自主可控可編程控制系統架構。通過剖析構成可編程控制系統的關鍵組件的功能原理,結合當前國內技術水平與自主可控要求,提出了可編程控制系統開發的技術途徑和關鍵技術解決思路。形成了標準化、模塊化的自主可控主從站硬件設計方法,自主可控實時以太網總線接口及協議開發方法,符合IEC61131-3標準的可視化編程、調試方法,跨平臺HMI組態編程方法,符合PLCopen規范的軟件定義功能塊的開發方法。該方法能夠為未來智能制造裝備國產化控制系統提供完整可靠的解決方案。
在自主可控工業控制技術被列入國家戰略的新時期,整合國內在制造業、電子信息、計算機等領域的技術,堅持智能制造裝備的國產化發展理念,努力突破基礎和關鍵技術瓶頸,形成國產可編程控制技術研發及產品生態鏈,從而打破歐美發達國家的技術壟斷,促進我國高端制造裝備的長遠發展。
猜你喜歡
鐘表(2023年5期)2023-10-27 04:20:44
中華詩詞(2022年6期)2022-12-31 06:41:24
當代陜西(2021年21期)2022-01-19 02:00:26
中學生數理化(高中版.高考數學)(2020年1期)2020-02-20 13:23:44
經濟技術協作信息(2018年11期)2019-01-14 03:07:20
中國科技論壇(2017年7期)2017-07-25 08:49:53
制造技術與機床(2017年3期)2017-06-23 08:11:33
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
