基于二維激光雷達的定日鏡清洗車導航避障系統的研究
2023-02-09 06:43:30薛剛強宓霄凌李曉波
太陽能 2023年1期
薛剛強,宓霄凌,李曉波
(浙江可勝技術股份有限公司,杭州 310053)
0 引言
定日鏡作為塔式太陽能熱發電站中聚光集熱系統的核心部件,其光學效率會直接影響整個電站的性能。由于定日鏡運行在戶外環境,空氣中的粉塵及其他污染物會逐漸堆積在其表面,使其表面的光學反射率下降。因此,必須設計高效的定日鏡清洗方式,對定日鏡進行周期性清洗,以提升整個電站的發電量。
目前,在世界范圍內,已有大量針對已投運塔式太陽能熱發電站定日鏡清洗方式的研究和試驗。西班牙的Sener公司和Torresol Energy公司針對該國已投運的19.9 MW Gemasolar塔式太陽能熱發電站的定日鏡聯合開發了一款智能清洗機器人[1],該機器人被放置在水平鏡面上,可自動行走完成清掃。以色列的BrightSource公司針對其2014年2月投運的392 MW Ivanpah塔式太陽能熱發電站的定日鏡設計了一款基于全球導航衛星系統(GNSS)定位的自動清洗車[2],該清洗車的本體為一臺起重機,清洗刷輥通過1根長24.5 m的可伸縮機械臂固定在本體上,在同一個位置可清洗約24.5 m范圍內的定日鏡,并可通過增加機械臂的長度來減少清洗車在鏡場內的行進里程。2015年3月投運的位于美國內華達州的新月沙丘110 MW塔式太陽能熱發電站的定日鏡清洗時采用的清洗車是在重型車輛本體上搭載水箱,然后由人工操縱定日鏡來清洗。
雖然上述清洗方式可實現清洗設備對局部定日鏡半自動化清洗導航,但對于整個鏡場的定日鏡清洗,仍需要人工干預,這主要是由于存在定日鏡因故障而轉角未到位的工況。浙江可勝技術股份有限公司以德令哈50 MW塔式太陽能熱發電站為背景,設計了一款可全自主執行定日鏡清洗任務的清洗車。該清洗車通過在本體上搭載清洗水箱,并結合高壓噴嘴、刷輥及精密的距離傳感器來控制清洗車主動靠近鏡面,以完成清洗任務,其結構如圖1所示。
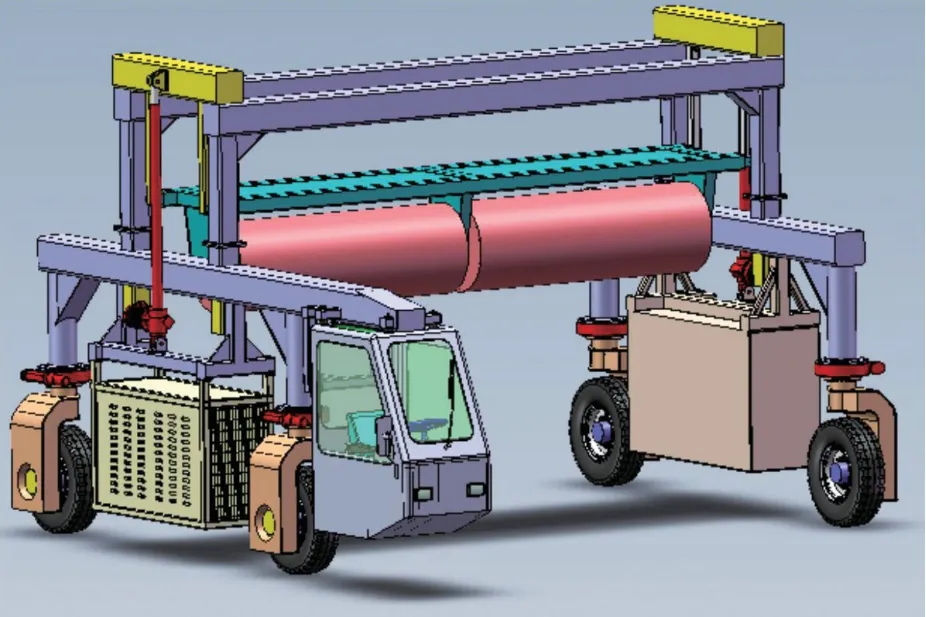
圖1 浙江可勝技術股份有限公司設計的定日鏡清洗車的結構圖Fig. 1 Structure diagram of heliostat cleaning vehicle designed by Cosin Solar Technology Co.,Ltd.
由于該清洗車的行進和清洗任務均是在無人工干預的情況下自主完成的,因此可將清洗任務安排在鏡場關場后的非日間時段,避免了日間清洗時因定日鏡處于待清洗狀態而造成的能量損失,有效提高了鏡場的運營效率,降低了運維成本。
由于該清洗車采用跨越式結構設計,其執行清洗任務時需要從水平放置的定日鏡鏡面上跨過去,因此,定日鏡需轉角至清洗車需要的清洗姿態。只有當定日鏡處于設計的清洗姿態時,清洗車才能正常進行跨越清洗作業而不發生碰撞事故;而當定日鏡不處于設計的清洗姿態時,如果清洗車不能檢測到這種異常工況,則會發生清洗車與定日鏡相撞的事故,輕則造成定日鏡鏡面玻璃破損,重則造成定日鏡反射體不可逆的破壞,甚至清洗車車體都可能因此而被撞毀。對于采用半自動化導航系統的清洗車的駕駛員,除了日常保養、維護清洗車之外,其每天的大部分工作內容是跟車,即跟著清洗車行走,使用人眼觀察清洗車是否會和障礙物碰撞,當發生意外情況時,可及時進行緊急制動。很顯然,這樣的工作內容是對人力資源的極大浪費。因此,亟待研發一套智能避障系統,使定日鏡清洗車實現全自動導航,全面解決清洗車駕駛員的跟車任務,解放生產力,同時降低清洗車及太陽能熱發電站的整體運維成本。
需要說明的是:任何避障系統都不可能依靠單一設備(比如激光雷達)來達到100%的避障效果。整個避障系統還應該包括紅外相機、超聲波傳感器、拉線開關等其他與激光雷達同級別的子系統。其中:紅外相機和激光雷達屬于中遠距離避障系統;超聲波傳感器屬于近距離制動系統;拉線開關作為接觸式制動系統,是整個避障系統的最后一道防線,由于拉線開關的物理性質,決定了其不能經常被觸發,否則可能存在因開關老化而制動失靈的風險。
本文提出了一種基于二維激光雷達(下文簡稱為“激光雷達”)的定日鏡清洗車導航避障系統,該系統由清洗車導航系統和激光雷達系統結合而成,利用激光雷達來測量前方定日鏡的姿態,并結合清洗車導航系統,從而實現清洗車對定日鏡的全自動化清洗。但需要說明的是,并非所有的異常姿態定日鏡都需要避障系統來制動,大部分定日鏡都具備電機角度反饋功能,當反饋功能正常運行時,鏡場控制系統可以檢測到異常的定日鏡,并通知清洗車導航系統進行制動。避障系統真正要解決的是那些因定日鏡存在故障而導致其角度反饋功能異常的情況。比如:大部分定日鏡的角度反饋功能在電機側,當電機驅動和鏡體脫離時,就會存在電機空轉但鏡體不動的故障,而此時,定日鏡反饋的角度卻是正常的,也就是說定日鏡并不知其轉角未到位,而本文提出的定日鏡清洗車導航避障系統主要用于解決此類問題。
1 WGS84坐標系與西安80坐標系的轉換
清洗車的激光雷達檢測到前方障礙物后需要將檢測到的障礙物的坐標和前方定日鏡的坐標在三維直角坐標系內進行對比計算,但由于二者的坐標形式不同,因此需要進行轉換。
定日鏡的坐標直接取自鏡場的坐標序列,其一般由橢球坐標系體現,而在塔式太陽能熱發電站范圍內,一般可將其放入局部直角坐標系內進行分析。在中國境內,橢球坐標系通常采用西安80坐標系,坐標點一般記為 (x,y,h),其中:x為橢球坐標系的北坐標;y為橢球坐標系的東坐標;h為高程。
常見的3種橢球坐標系的相關參數如表1所示。其中:a為橢球長半軸;b為橢球短半軸;f為橢球扁率;e為第一偏心率;et為第二偏心率。
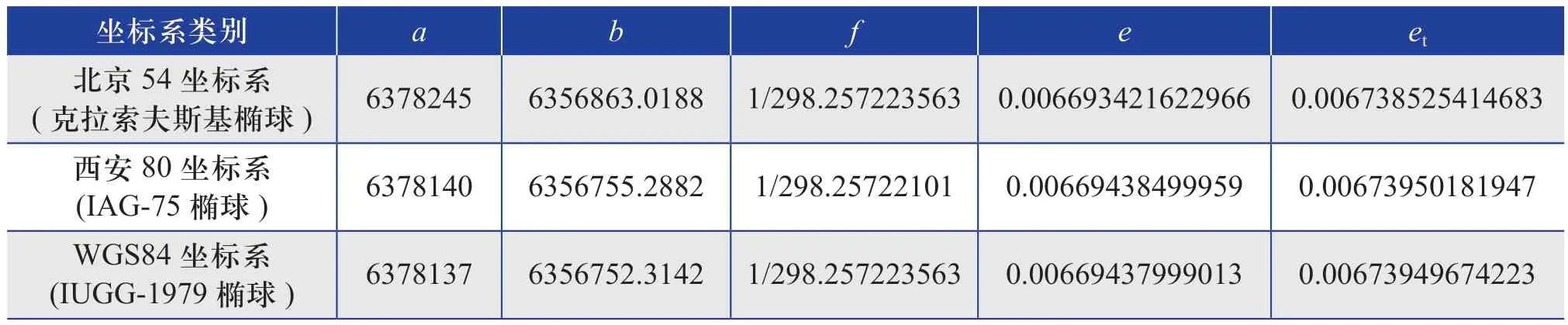
表1 常見的3種橢球坐標系的相關參數Table 1 Relevant parameters of three common ellipsoidal coordinate systems
障礙物坐標的初始形式采用的是激光雷達局部坐標系,根據激光雷達的安裝參數可將障礙物坐標轉換到以車輛中心為原點的車輛坐標系內,再將車輛中心在鏡場坐標系(即“世界坐標系”)中的坐標轉換到鏡場坐標系。而車輛中心坐標一般是通過采用實時動態載波相位差分(RTK)技術的GNSS設備獲取(下文簡稱為“RTK設備”),其坐標形式為WGS84坐標系的經度與緯度,坐標點一般記為(B,L,H),其中:B為經度;L為緯度;H為經緯度坐標系下的高程,通常H=h。假設WGS84坐標系記為O1、西安80坐標系記為O2,但通常由RTK設備輸出的WGS84坐標系O1和西安80坐標系O2根本不是一個橢球坐標系,因此,需要進行轉換。完整的轉換鏈為:綜上可知,任何一個三維坐標均存在以下兩種形式:(x,y,h)和 (B,L,H)。
同一個橢球坐標系內,坐標(B,L,H)轉換到(x,y,h)的方法是采用Gauss-Kruger正向投影,具體的轉換公式為[3]:
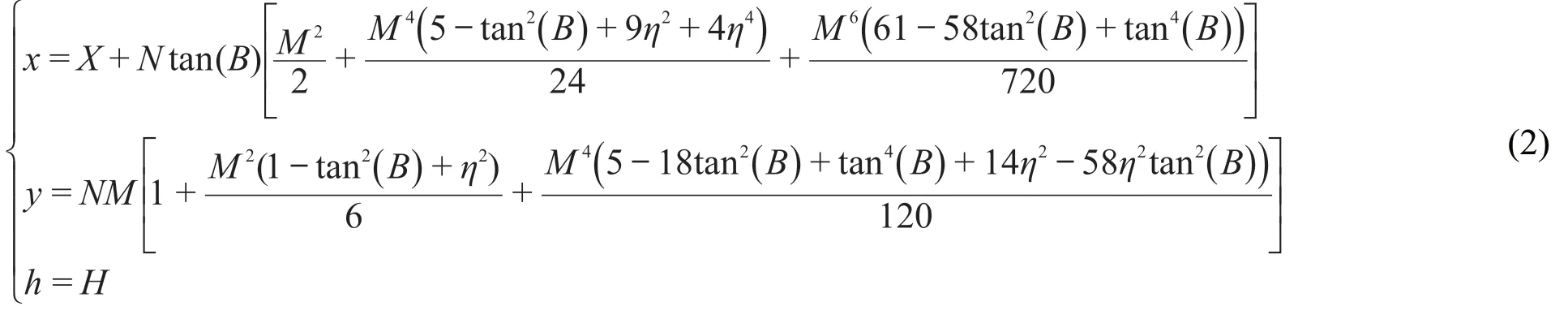
式中:X為子午線弧長。
其中:
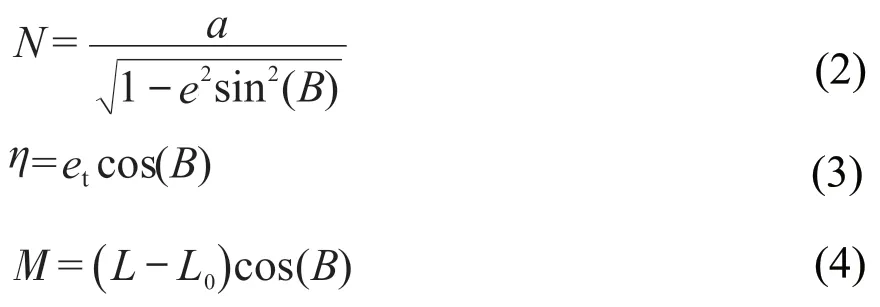
式中:L0為中央子午線經度[1]。

通過式(1)~式(12)實現了將坐標(B,L,H)向(x,y,h)的轉換。
需要利用Bursa-Wolf模型將O1(x,y,h)轉換到O2(x,y,h)。Bursa-Wolf模型可表示為:

式中:Rx、Ry、Rz分別為繞x、y、z軸旋轉的歐拉旋轉運算符號;α、β、γ分別為x、y、z軸的旋轉角度;m為坐標軸縮放量;BWce為Bursa-Wolf模型的旋轉中心點。
采集多個檢測點作為標定值,可以完成式(13)中參數的標定。至此,所有從O1(B,L,H)轉換到O2(x,y,h)所需的信息都已完備。
2 清洗車導航避障系統檢測方案
2.1 清洗車導航避障系統的工作原理
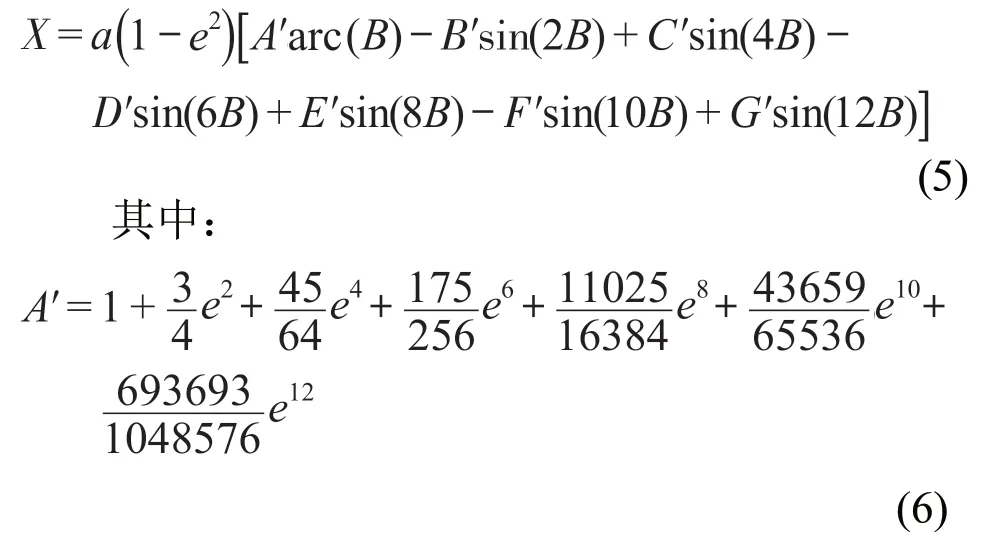
安裝有導航避障系統的清洗車在沿著清洗軌跡(圖中的黑色虛線)清洗時的俯視圖如圖2所示。
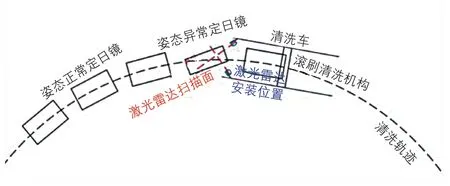
圖2 安裝有導航避障系統的清洗車在沿著清洗軌跡清洗時的俯視圖Fig. 2 Top view of cleaning vehicle equipped with navigation and obstacle avoidance system when cleaning along cleaning track
安裝在清洗車前端的激光雷達不斷掃描障礙物,并將掃描后獲取的數據傳輸至安裝在清洗車上的工控機,工控機中的激光雷達避障系統通過分析來確定哪些掃描點是屬于定日鏡的,然后將屬于定日鏡的這些掃描點擬合成一條直線。由于通過安裝在清洗車左右兩側的激光雷達掃描障礙物而得到的兩條定日鏡掃描點擬合線在設計上是必然相交的,激光雷達避障系統將兩條擬合線的坐標從激光雷達坐標系轉換到鏡場坐標系,具體步驟為:1)根據激光雷達安裝參數將位于激光雷達坐標系的兩條定日鏡掃描點擬合線的坐標轉換到車輛坐標系;2)將從RTK設備獲取的經緯度坐標轉換到鏡場坐標系。利用上述兩條相交的擬合線推算出目標檢測平面(即定日鏡鏡面所在的平面)的法向位置,從而確定被測定日鏡的實際傾角。當檢測到的定日鏡傾角大于預設的傾角閾值上限時,制動清洗車。
安裝有導航避障系統的清洗車行駛時,激光雷達掃描過程的仿真圖如圖3所示。圖中:綠色四邊形為仿真的定日鏡鏡面位置,紅色和黑色區域均為激光雷達掃描的平面,平面與定日鏡鏡面形成的截線就是導航避障系統想要提取的結果。
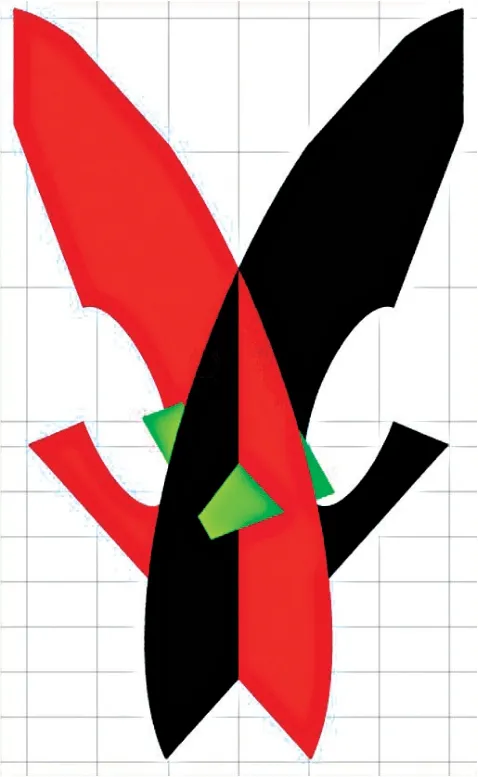
圖3 激光雷達掃描過程的仿真圖Fig. 3 Simulation diagram of laser radar scanning process
2.2 激光雷達的工作原理及設備選型
2.2.1 工作原理
二維激光雷達可沿其安裝平面掃描預設角度范圍內的某一區域,并根據該區域內被測物體與掃描儀的相對位置,得到相應的測量數據,這些數據標記為極坐標(θ,r)的形式。其中:θ為被測物體與掃描儀的相對角度;r為被測物體與掃描儀之間的距離。采用飛行時間差(ToF)測量方法時激光雷達的工作原理如圖4所示。圖中:t為脈沖發送和接收的時間差。
圖4 采用ToF測量方法時激光雷達的工作原理Fig. 4 Working principle of laser radar using ToF measurement method
2.2.2 設備選型
本文采用的激光雷達為德國西克(SICK)公司生產的型號為LMS111的激光雷達。LMS1xx系列激光雷達的測量距離和檢測角度范圍如圖5所示。

圖5 LMS1xx系列激光雷達的測量距離和檢測角度范圍Fig. 5 Measuring range and detection angle range of LMS1xx serial laser radar
該激光雷達的檢測角度范圍為270°,在0.5~18.0 m測量距離內可保證測量結果的精度,最大探測點達20~50 m。上述參數數值基本滿足清洗車導航避障系統的需求。
2.3 運動學原理
激光雷達得到的原始測量數據為激光雷達坐標系OL下的坐標,而檢測定日鏡姿態所需的擬合線需為鏡場坐標系OW下的坐標。二者之間的轉換關系即本節所闡述的運動學原理。
由于激光雷達坐標系無法直接轉換到鏡場坐標系下,但激光雷達安裝在清洗車上,因此二者之間的轉換需要通過清洗車坐標系OV來進行。
2.3.1通用的坐標轉換模型
在不拉伸和彎曲的直角坐標系內,假設存在某個坐標點P(x,y,z),其在任意2個直角坐標系O1和O2中的坐標分別為P1和P2,則將P1轉換為P2的方式為:

式中:R*i為歐拉旋轉的自由組合,i=1, 2, 3,可根據實際的建模方式選擇最易調試和理解的模型;T為轉換函數;Ce1為P1的旋轉中心點。
根據式(14)可得到P2轉換為P1的方式為:

假設:TL2V為激光雷達坐標系向清洗車坐標系的轉換函數;TV2W為清洗車坐標系向鏡場坐標系的轉換函數;CL2V為TL2V對應的中心坐標點;CV2W為TV2W對應的中心坐標點。
對于激光雷達坐標系向清洗車坐標系的轉換函數,根據激光雷達的實際安裝姿態,R*i分別取Rz、Rx、Rz,這樣更加符合一般的建模思路。
對于清洗車坐標系向鏡場坐標系的轉換函數,考慮到清洗車上安裝的RTK設備可直接輸出航向角Ah、橫滾角Ar、俯仰角Ap的值,R*i分別取Rx、Ry、Rz后,可直接得到α=-Ar、β=-Ap、γ=-Ah的對應關系,這顯然是最便捷和最直觀的建模方案。
綜上,任意點P在激光雷達坐標系下的坐標PL和在鏡場坐標系下的坐標PW的相互轉換關系可表示為:

2.3.2 坐標系的定義
在鏡場坐標系下,將正南方向、正東方向、天頂方向分別定義為坐標系x、y、z的3個正方向。
在清洗車坐標系下,將車輛后退方向、車輛正右方向、天頂方向分別定義為坐標系x、y、z的3個正方向。
在激光雷達坐標系下,將激光雷達的0°掃描光線、激光雷達的90°掃描光線、右手系垂直于掃描面方向分別定義為坐標系x、y、z的3個正方向。
2.3.3 運動學參數標定
通過獲取激光雷達坐標系向清洗車坐標系轉換和清洗車坐標系向鏡場坐標系轉換涉及到的所有參數,即可實現激光雷達坐標系到鏡場坐標系的轉換。而將激光雷達坐標系的坐標轉換到清洗車坐標系時,可通過截取定日鏡在不同姿態下的測量結果,按照運動學模型聯立等式,從而求解激光雷達的安裝參數,具體方法如下文所述。
對于清洗車坐標系向鏡場坐標系的轉換而言,CV2W就是RTK設備反饋的鏡場坐標系下車輛的中心坐標點,根據上文所述的建模關系,x、y、z軸的旋轉角度也可以直接由RTK設備輸出的航向角、橫滾角、俯仰角換算得到。綜上可知,清洗車坐標系向鏡場坐標系的轉換涉及到的所有參數都是已知的,無需標定。
對于激光雷達坐標系向清洗車坐標系的轉換而言,CL2V是激光雷達的安裝位置相對于車輛中心的坐標,可以從車輛的結構圖紙及激光雷達的實際安裝位置得到。激光雷達坐標系向清洗車坐標系轉換時涉及到的航向角、橫滾角、俯仰角(即x、y、z軸的旋轉角度α、β、γ)的取值由RTK設備安裝時的精度決定,是導航避障系統中實際需要進行標定的參數。
將清洗車和定日鏡放置在幾種不同的相對位置關系下,組合定日鏡不同的鏡面角度,可采集多組定日鏡實際姿態和激光雷達反饋的原始數據,用于激光雷達安裝角度的標定。
假設:Ah,k為第k個標定的定日鏡姿態樣本,其同鏡場坐標系下的坐標PW序列擬合成一條直線;Ah=L2A(LL,LR)為清洗車上左右兩側的激光雷達擬合得到的直線LL和LR轉換到定日鏡實際角度的算法。當標定樣本個數為p時,激光雷達的標定模型為:
式中:k為第i個定日鏡姿態,即車輛位置的第k次標定,k=1,…,p;Lfit為直線擬合函數;PLn為左側激光雷達的第n個點;PRn為右側激光雷達的第n個點。
通過數組標定樣本,可以擬合得到激光雷達坐標系向清洗車坐標系轉換時激光雷達的安裝角度值。
綜上可知,激光雷達坐標系到鏡場坐標系的轉換過程已完全確定。
2.4 擬合線算法
本文的擬合線算法采用由Fischler和Bolles提出的隨機樣本共識(RANSAC)算法,其原理是在集合Pts中隨機選取若干個點構成子集S;然后計算余集中誤差小于預設值的點的數量,若數量大于預設值,則認為取得一致;若數量小于預設值,則需重新選擇子集,并重復上述步驟,直到數量大于預設值。
本文中得到擬合線的具體步驟為:1)在目標點群中隨機選擇2個點;2)計算過這兩個點的直線的公式;3)統計目標點群與這條直線的距離在一定閾值范圍內的點的數量;4)多次重復上述步驟,然后選擇范圍內點數最多的2個點所在的直線作為擬合結果。
由于激光雷達的測量精度較高,定日鏡鏡面上大部分測量點的波動可控制在5 mm以內(該值根據實際執行經驗得到),這也是該算法能在本方案中順利采用的重要原因。
3 測試結果分析及測試中存在的問題
3.1 測試結果分析
測試前的設備狀態為:激光雷達工作正常,清洗車及其導航系統工作正常,鏡場控制系統和與測試相關的定日鏡工作正常。測試條件為:環境風速不超過定日鏡工作風速,無大雨、大雪等極端天氣。測試地點為:青海省海西州德令哈市50MW塔式太陽能熱發電項目(二期)所在地。激光雷達設備現場安裝后的照片和清洗車導航避障系統的現場測試照片分別如圖6、圖7所示。圖7中的紅圈為激光雷達設備安裝位置。
圖6 激光雷達設備現場安裝后的照片Fig. 6 Photo of laser radar equipment after on-site installation

圖7 清洗車導航避障系統的現場測試照片Fig. 7 Field test photo of navigation and obstacle avoidance system of cleaning vehicle
實測得到的典型幀測量數據在激光雷達坐標系下的結果如圖8所示。圖中:藍色和黑色分別表示左右側激光雷達的測量數據;空心圓點為標定參數下仿真檢測到的鏡面位置;實心圓點為非檢測范圍內(地面、天空等)的掃描點;棱形點為檢測范圍內的掃描點;虛線為根據棱形點擬合的直線。
對于圖8而言,當定日鏡姿態沒有異常時,虛線和空心圓點形成的直線越接近,說明標定參數越準確。當清洗車實際運行時,通過觀察虛線和空心圓點形成的直線的接近程度可以推測定日鏡的轉角異常情況。
當定日鏡姿態明顯為異常姿態 (定日鏡高度角大于20°)時,導航避障系統能夠非常容易檢出,并觸發制動;但當定日鏡姿態和正常姿態較為接近時,檢測難度相對較大。對異常姿態非常接近正常姿態的定日鏡測試結果進行統計,具體如表2所示。表中:電機角度指控制系統從定日鏡電機編碼器處讀取的角度。區別于定日鏡實際姿態,電機角度以電機零位為標準,例如定日鏡存在2°的高度角初始安裝偏差時,電機角度為3°,則定日鏡的實際傾角為5°。對于跨越式清洗車,在設備無安裝偏差的情況下,當保持定日鏡的水平角不動,即使方位角旋轉180°,定日鏡的姿態未發生改變,仍然處于清洗姿態。
表2 異常姿態接近正常姿態的定日鏡的測試結果Table 2 Test results of heliostat with abnormal attitude close to normal attitude
從表2可以看出:當電機角度為正向9°工況下,所有定日鏡都能觸發制動;當電機角度為正向6°時,只有1面定日鏡觸發制動;而電機角度為反向6°時,所有定日鏡都能觸發制動。同時,根據導航避障系統提示的檢測值,電機角度為正向6°時,未觸發制動的3面定日鏡,導航避障系統識別結果為3°~4°;而電機角度為反向6°時,識別結果為8°~9°。由上述現象可知,電機角度為正向6°時,3面未觸發制動的定日鏡是由于存在初始-2°~-3°的安裝偏角所導致,當真實定日鏡姿態大于6°時,則可以觸發制動。
3.2 測試過程中存在的問題
3.2.1 誤檢測問題
清洗車在啟用導航避障系統后,于2020年11月23日~12月8日期間進行測試,由于11月28日和12月1日存在天氣(如下雨)等影響因素,清洗車未作業,導致這兩天無相關測試數據。根據14天的跟蹤測試結果,日均誤報次數為3.2次,需要人工確認后才會自動恢復到導航模式。清洗車一天清洗的定日鏡數量在1000面左右,相當于誤報率為0.32%。若目標是導航避障系統每日或數日只發生1次誤報,則需進一步將誤報率優化到0.1%以下。測試期間導航避障系統的誤報次數統計如表3所示。
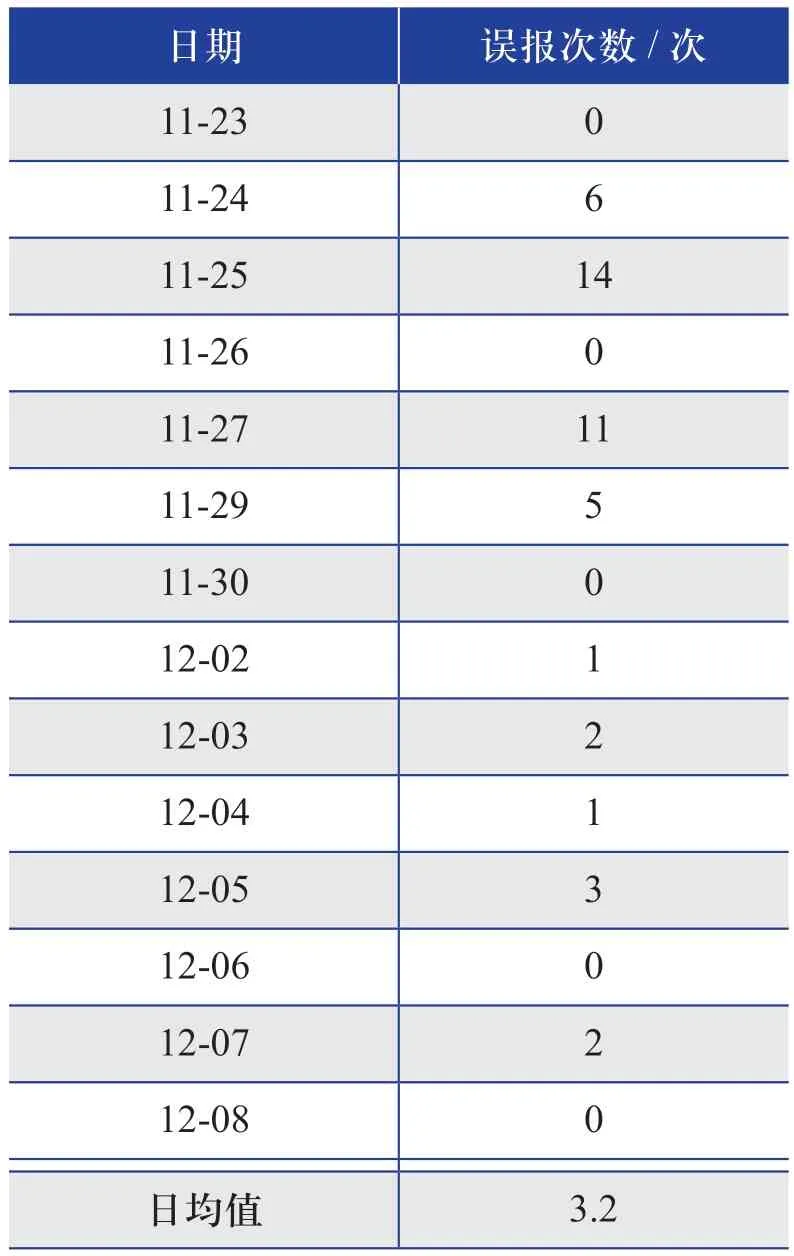
表3 測試期間導航避障系統的誤報次數統計Table 3 Statistics of number of false positives of navigation obstacle avoidance system during the test
3.2.2 定日鏡鏡面問題
在測試過程中發現,當定日鏡鏡面玻璃極為干凈,且鏡面法向完全和激光雷達掃描面垂直時,激光雷達不能很好地反射測量結果,這是由激光雷達設備的基本特性決定的,暫時無法解決。這種工況下,目前只能由紅外相機等其他避障子系統進行檢測。由于清洗任務調度模塊一般會優先安排清洗車清洗清潔度較差的定日鏡,所以定日鏡鏡面極為干凈的工況在非測試條件下的實際工程項目中遇到的概率較低。
4 結論
本文提出了一種基于二維激光雷達的定日鏡清洗車導航避障系統,并在50 MW塔式太陽能熱發電項目上實測投用。測試結果顯示:定日鏡電機角度超過6°時,定日鏡都可以觸發制動;在14天的測試周期內,導航避障系統的日均誤報次數為3.2次。初步達到可檢測異常定日鏡且誤報次數在可接受范圍內的要求。
經分析發現,導航避障系統的測量精度敏感性和激光雷達的安裝角度有關,當掃描面完全垂直于車輛行進方向時,激光雷達對鏡面水平傾角變化最為敏感,但掃描距離最短,只有當激光雷達抵達待檢測鏡面下方時才能獲取檢測結果;當掃描面和車輛行進方向完全平行時,測量距離最遠,但測量精度敏感性最差。如何在測量精度敏感性和測量距離之間取得平衡,需要根據現場的長期測試結果進行綜合評估。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34