金屬礦山井下斜坡道交通信號自動控制系統研發與應用
2023-02-10 14:21:50戴芬良金開玥鄭祿林劉樹義陳忠賀
黃金 2023年1期
關鍵詞:系統
戴芬良,金開玥 ,鄭祿林,劉樹義,陳忠賀
(1.貴州工業職業技術學院; 2.貴州錦豐礦業有限公司; 3.貴州大學礦業學院; 4.丹東東方測控技術股份有限公司)
引 言
斜坡道作為礦山最重要的開拓方式之一,其突出優點是可以節省工程量和投資,加快礦山建設速度,縮短礦山建設時間,同時便于無軌設備暢通于各工作面,加快設備周轉,提高設備利用率[1]。但斜坡道本身具有寬度有限、坡度大、彎道多、路面濕滑等特點,導致在斜坡道上出現會車、長距離倒車、擁堵等現象,并易發生車輛追尾、碰撞等安全事故[2-3]。為克服上述斜坡道運輸存在的缺點,不少研究人員開展了井下斜坡道交通信號自動控制系統的研究,并在一些礦山進行了應用,取得了良好的應用效果[4-7]。井下斜坡道交通信號自動控制系統,主要由車輛定位與識別系統、信號燈組、通信系統及控制中心組成。其中,車輛定位與識別是斜坡道交通信號自動控制系統的基礎,直接影響系統的準確性及穩定性。目前,采用的設備定位與識別技術,主要有ZigBee無線通信技術、RFID射頻識別技術、Wi-Fi定位技術、UWB定位技術等[8]。由于井下環境的復雜性及斜坡道本身彎道多等特點,單一的定位技術難以滿足系統控制精度及實時獲取設備位置信息的要求。
控制中心對信號燈的控制規則直接影響系統對斜坡道交通的管控效果,斜坡道交通控制規則主要有“閉鎖”和“優先級別”兩種[9]。“閉鎖”控制規則將斜坡道劃分為段,當有車輛進入某路段時,該路段兩端亮紅燈,將該路段“閉鎖”。“優先級別”控制規則將車輛進行分類,并賦予不同的優先級別,高級別的車輛優先通行。現有的斜坡道交通信號自動控制系統多采用“閉鎖”控制規則,例如,程晰等[4]采取的“先到先會讓”及“分支讓主干”控制規則,以及盛高永等[10]在會寶嶺鐵礦采用的“同一巷段系統采用對向行駛車輛避讓、同向行駛車輛允許跟進1輛”控制規則,“閉鎖”控制規則不考慮車輛的避讓難易程度及重要性。本研究以某超大型金礦井下斜坡道運輸系統為依托,采用ZigBee無線通信技術和RFID射頻識別技術協同實現設備高精度定位和識別,同時依據設備重要性及避讓的難易程度為設備設置通行優先級別,對信號燈控制規則進行設計。此外,建立了環網光纖網絡進行通信,確保信息傳輸的及時性及系統的穩定性,實現井下紅綠燈的自動控制,有效規范車輛的行駛行為,以保障斜坡道交通的順暢,提高運輸效率,降低安全風險,保障井下生產管理的順暢溝通與協調。
1 工程背景
某超大型金礦采用地下開采,斜坡道開拓,礦巖及材料均采用移動設備通過斜坡道運輸,采礦方法為上向水平分層進路式膠結充填采礦法,中段高度60 m,分段高度20 m,分層高度5 m,最終開采深度接近1 000 m。礦巖為砂巖和泥巖,遇水易泥化、板結,加之礦體形態向深部逐漸縮小,限制了對溜井及豎井提升系統的應用。礦山一直采用斜坡道進行開拓,卡特AD45B卡車進行礦巖及材料運輸。斜坡道斷面為5.0 m×5.5 m,坡度不超過1/7。礦山自有主要生產設備均為大型無軌設備,加上礦山深部延伸擴能工程建設施工方生產設備及其他輔助車輛,下井車輛達150多輛。礦山產能120萬t/a,運輸任務繁重,斜坡道交通運輸繁忙,擁堵問題嚴重,車輛追尾、碰撞的安全事故時有發生,交通擁堵及交通事故嚴重影響礦山的安全高效生產。
礦山前期已建有設備人員定位系統及語音對講系統。設備人員定位系統僅用于定位,且建設時間較早,定位精度、系統穩定性均不能滿足高精度交通管控的要求。“語音對講系統報站”是井下唯一的交通管控方式,由于車輛較多,“報站”長時間占用語音對講系統,導致車輛無法報站的情況經常發生;同時,井下生產管理的溝通協調也是通過該語音對講系統進行的,大量的車輛“報站”嚴重影響井下生產管理的溝通與協調。
2 井下斜坡道交通信號自動控制系統組成及工作原理
2.1 系統組成
井下斜坡道交通信號自動控制系統由車輛定位模塊、信號燈控制模塊、綜合分站、綜合網絡傳輸平臺、控制中心、B/S客戶端組成[11]。其中,車輛定位模塊包括安裝于斜坡道的定位天線、激勵器和車載定位卡,信號燈控制模塊由紅、黃、綠三色信號燈燈組及控制器組成;綜合分站與定位天線、信號燈控制器連接,并通過千兆光纖接口接入井下光纖環網;綜合網絡傳輸平臺由井下光纖環網、環網交換機、地表主干光纖、局域網接入機柜交換機組成;控制中心由服務器、桌面計算機及軟件系統組成。系統控制原理如圖1所示。

圖1 井下斜坡道交通信號自動控制原理圖
2.2 井下系統設備布置
井下系統設備布置如下:①在斜坡道每個岔口安裝1臺綜合分站,綜合分站之間通過光纖環網連接;②在每個岔口安裝3組信號燈,分別用來指揮上行、下行和從支路進入斜坡道的車輛;③在分段聯巷等支路內安裝1組信號燈;④在岔口安裝1組天線,進行斜坡道無線網絡覆蓋;⑤在岔口的每個路口各安裝1組激勵器,用來輔助車輛定位并精確控制信號燈[3];⑥在彎道盲區位置增加綜合分站和定位天線。井下系統的設備布置如圖2所示。
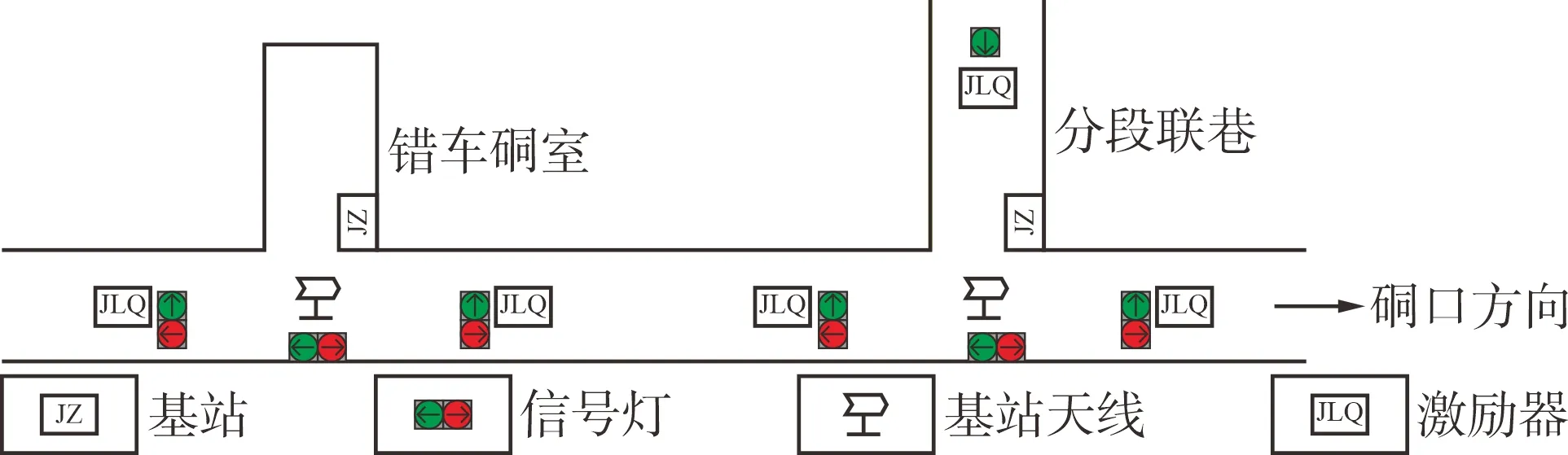
圖2 井下斜坡道交通信號自動控制系統井下設備布置示意圖
2.3 車輛定位與識別
車輛定位系統采用基于ZigBee TOF的定位技術,實現對井下車輛的實時定位。通過基站和定位模塊,實現斜坡道及其支路的ZigBee信號全覆蓋。每輛下井的車輛均安裝1臺定位卡,每輛車的定位卡都有唯一的ID,并與車輛所屬種類、車牌號、使用部門等信息綁定。基于飛行時間定位算法實現移動車輛定位,并采取特殊的碰撞避免策略及靈活的隨機算法保證高速不漏卡。考慮到井下無線信號傳播環境相對復雜,影響定位精度[12],增加了激勵器輔助車輛定位系統定位,用于車輛的近距離識別。當裝有車載定位卡的車輛進入激勵器識別范圍后,定位卡被激勵,激勵器將自身ID通過無線網絡傳輸至定位卡,定位卡將激勵器ID及自身的特征信息通過無線網絡傳輸至綜合分站,綜合分站將信息上傳至控制中心,從而獲取車輛及其準確的位置信息,其定位精度可達到3 m以內。
2.4 信息傳輸
車載定位卡與綜合分站之間通過ZigBee無線網絡進行信息傳輸。綜合分站接入井下千兆光纖環網,綜合分站與綜合分站之間、與地表控制中心之間、與信號燈控制器之間通過TCP/IP協議進行通信。井下千兆光纖環網從物理和邏輯上考慮環網冗余設計,如果在環網中某個分站或鏈路發生故障,傳輸路徑將選擇反方向傳輸,保證傳輸平臺通道信號不中斷,而且系統能及時診斷出故障點以便維修,為系統信息傳輸提供可靠保障。
2.4.1 信號燈的控制規則
相對于“閉鎖”控制規則,“優先級別”控制規則允許車輛同向進入某一路段而互不影響,同時可以確保救援車輛等特殊車輛優先通行。考慮井下車輛的重要性及避讓難易程度的差異性,本系統采用“優先級別”控制規則。
2.4.1.1 車輛優先級別
為確保井下緊急情況下救援車輛的通行不受限制,將救援車輛優先級別設為最高。上行載重卡車優先級別僅次于救援車輛,一方面是因為其讓車較為困難,另一方面是因為卡車優先通行有助于提高卡車的運輸效率。各類車輛優先級別如表1所示。
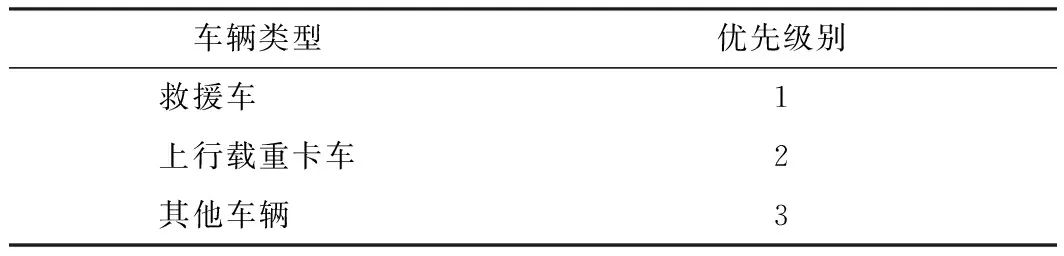
表1 井下車輛的優先級別
2.4.1.2 控制規則
1)優先級別為“1”的救援車輛進入巷道后,與其對向的所有信號燈被設置為紅燈,井下所有車輛提前進行避讓,確保救援車輛行駛暢通。信號燈控制示意圖如圖3所示。
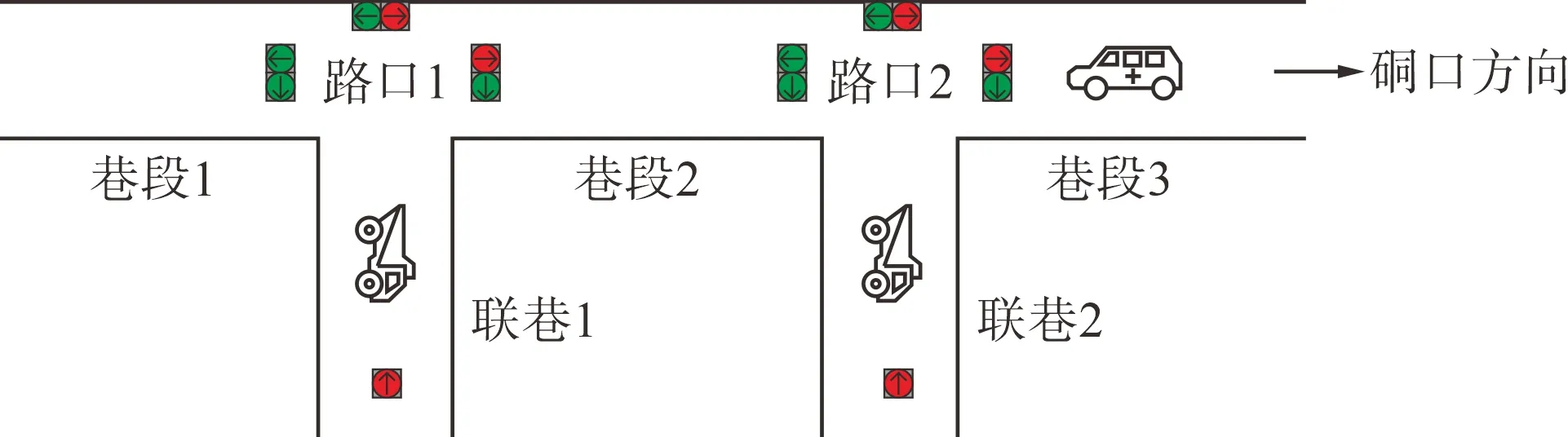
圖3 最高優先級別車輛入井時信號燈控制示意圖
2)上行載重卡車的優先級別被設置為“2”,如圖4所示,當其在巷段1內上行行駛時,路口1的下行信號燈被設置為紅燈,路口2的下行信號燈將被設置為黃燈。此時,路口1的其他對向車輛將提前進行避讓,而路口2的對向車輛在遇上黃燈時,可以在原地稍作停留,若黃燈變為紅燈,則該車應提前進行避讓,若黃燈變為綠燈,說明載重卡車已駛入分支巷段,其他車輛可以繼續行駛。
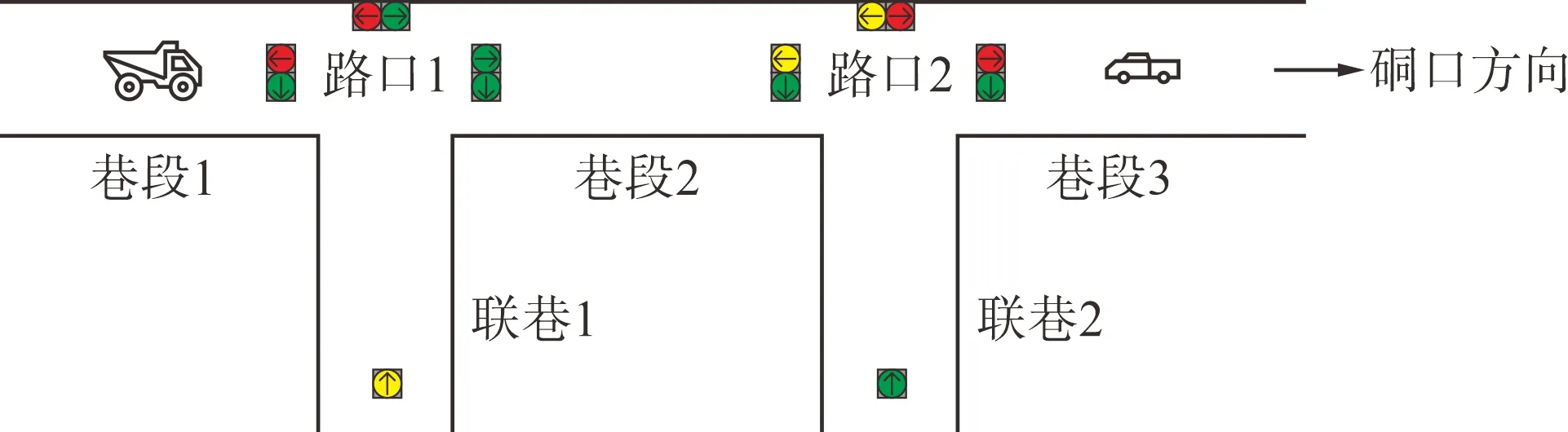
圖4 上行載重卡車行駛時的信號燈控制示意圖
3)當優先級別為“3”的車輛進入巷段1時,僅有路口1的信號燈亮紅燈,如圖5所示。
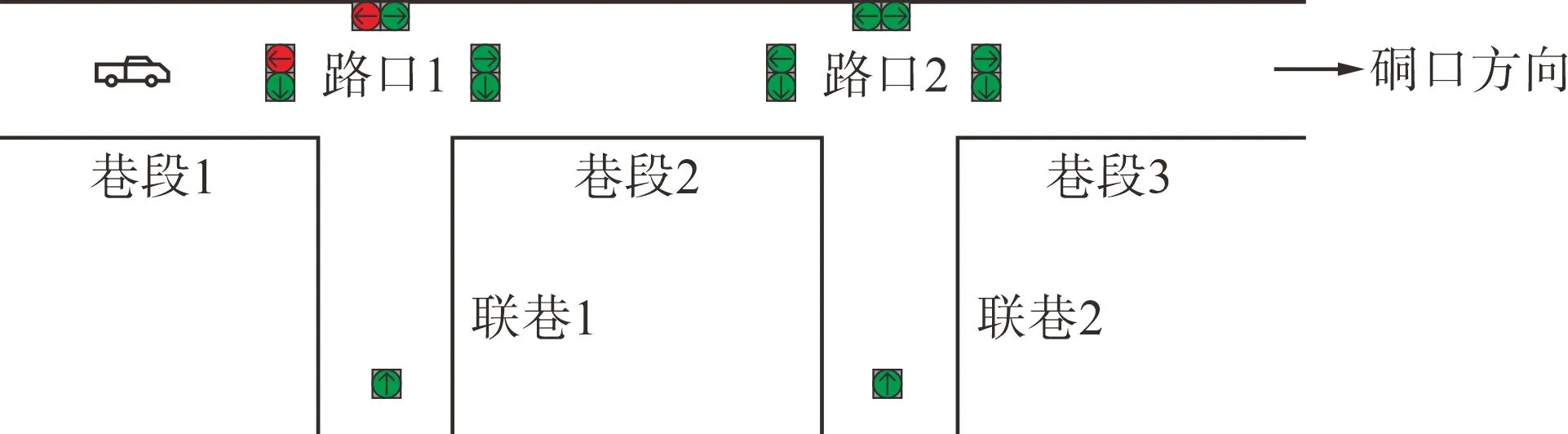
圖5 低優先級別車輛信號燈控制示意圖
4)當車輛同向行駛時,前車不會影響后車正常通行,如圖6所示。

圖6 車輛同向行駛時信號燈控制示意圖
5)系統允許人工干預,特殊情況下,可以臨時提高個別車輛的優先級別,或者人為設置信號燈狀態,確保特殊情況下特殊車輛優先通行。
2.4.2 軟件系統
軟件系統的核心為網絡通信及信號燈控制模塊,結合礦井GIS系統,實時可視化顯示井內信號燈狀態,車輛、人員分布信息。同時,增加了設備歷史軌跡存儲與查詢、車輛違章信息存儲與查詢、卡車運輸量統計等輔助功能。
3 井下斜坡道交通信號自動控制系統應用
3.1 交通信號自動控制
該超大型金礦井下斜坡道交通信號自動控制系統自2018年建成投入使用以來,共安裝綜合分站54臺,交通信號燈72組,實現了斜坡道、各分段聯巷及主要分段的無線網絡覆蓋,在斜坡道各岔口均安裝了信號燈,車輛定位準確,在設定的控制邏輯下,實現了交通信號燈的準確、有序和穩定運行,如圖7所示。

圖7 井下紅綠燈實際運行效果圖
3.2 輔助功能
1)系統狀態、車輛位置信息實時動態監控。開發了客戶端應用程序,結合礦井GIS系統,可視化實時動態顯示井下信號燈狀態、車輛和人員位置信息等。
2)車輛歷史運行軌跡回放。車輛的運行數據存儲于數據庫中,可對車輛的歷史運行軌跡進行查詢與回放。
3)違章查詢。車輛的不規范行駛,是導致井下交通事故的主要原因,系統自動記錄車輛超速、闖紅燈等違章行為,并保存在數據庫中,可通過客戶端進行查詢。
4)系統數據。系統通過運輸卡車的運行數據,自動統計卡車的運輸次數,再根據經過長期統計與修正后的卡車載質量,實現運輸量的自動統計,統計數據存儲于數據庫中,供查詢或生成報表,報表可以打印或導出為Excel文件。
3.3 應用效果
1)該超大型金礦井下斜坡道交通信號自動控制系統自正常運行以來,井下交通事故的發生率大幅下降,從年均10起以上,降為年均5起以下,且均為輕微級別,有效保障了井下斜坡道運輸安全。
2)紅綠燈系統的應用,使得司機可以提前避讓前方車輛,基本杜絕斜坡道上非車輛故障原因造成的交通擁堵及車輛長距離倒車現象。
3)系統建成前,AD45B卡車的平均運輸效率為108 t·km/h,系統建成后,平均運輸效率為114 t·km/h,運輸效率提升了5.6 %。根據實際統計,每臺運輸卡車的年均運行時間為4 600 h,平均拉運距離為3.3 km,按每年生產330 d計算,則8臺AD45B卡車每年的拉運總量增加66 909 t,根據實際礦廢比例,礦石拉運量增加50 516 t。按礦石品位3.2 g/t、綜合選冶回收率86 %、黃金銷售價格340元/g計算,則礦山每年產值增加4 727萬元,經濟效益顯著。
4)系統建成后,已基本不需要使用語音對講系統進行車輛報站,大大提高了使用對講機進行溝通的效率,提高了生產調度效率。
4 結 論
1)該系統實現了井下人員及車輛高精度定位,精度可達到3 m以內,實現了信號燈的自動控制,規范了井下斜坡道行車。
2)系統建成后,AD45B卡車的平均運輸效率提升了5.6 %,年拉運總量增加了66 909 t,每年產值增加4 727萬元。
3)井下斜坡道交通信號自動控制系統的運行有效降低了井下行車安全風險,井下交通事故的發生率大幅下降。
4)該超大型金礦原來使用的井下語音對講系統長時間被車輛報站占用的情況得到改善,井下生產組織和管理溝通效率得以大幅提升。
5)開發了設備位置實時顯示、車輛歷史運行軌跡回放、違章查詢、生產數據自動統計等輔助功能,提高了礦山生產調度指揮效率。
6)該超大型金礦井下紅綠燈自動控制系統的研發,提高了井下運輸安全性和斜坡道運輸效率,具有良好的經濟和社會效益。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32