基于MPPT的光伏并網逆變器研究
2023-02-17 07:21:42張志敏彭紅義潘若妍周振雄
電源技術 2023年1期
關鍵詞:控制策略
張志敏,彭紅義,潘若妍,周振雄
(北華大學電氣與信息工程學院,吉林吉林 132000)
國內外對最大功率點跟蹤(MPPT)控制技術做了大量的研究,在控制算法上取得了大量研究成果,但是隨著光伏發電并網的應用,需要更好地控制光伏發電并網質量和受到干擾后的最大功率點跟蹤。
為了提高系統效率,降低輸出功率在最大功率點附近振蕩,本文對擾動觀測法進行改進,提出了基于滯環比較的變步長擾動觀測法。同時在分析并網逆變器控制策略的基礎上,利用鎖相環技術和電網電壓前饋補償的復合控制策略,能夠降低并網的諧波含量,提高電能質量。在Matlab/Simulink中對基于滯環比較的變步長擾動觀測法和并網逆變器的控制策略進行了仿真,結果證明了本文改進的擾動觀測法具有更快的跟蹤速度,并網電流具有更好的跟蹤性能和較小的諧波含量。
1 光伏發電特性與系統分析
1.1 光伏發電特性分析
對光伏發電系統進行區分時,可劃分為離網與并網兩種形式[1]。并網方式光伏發電系統通過裝置與大電網進行互聯,光伏系統發出的電能不僅能夠為負載直接利用,還能夠將多余的電能并入電網,常見的光伏發電系統結構如圖1 所示。
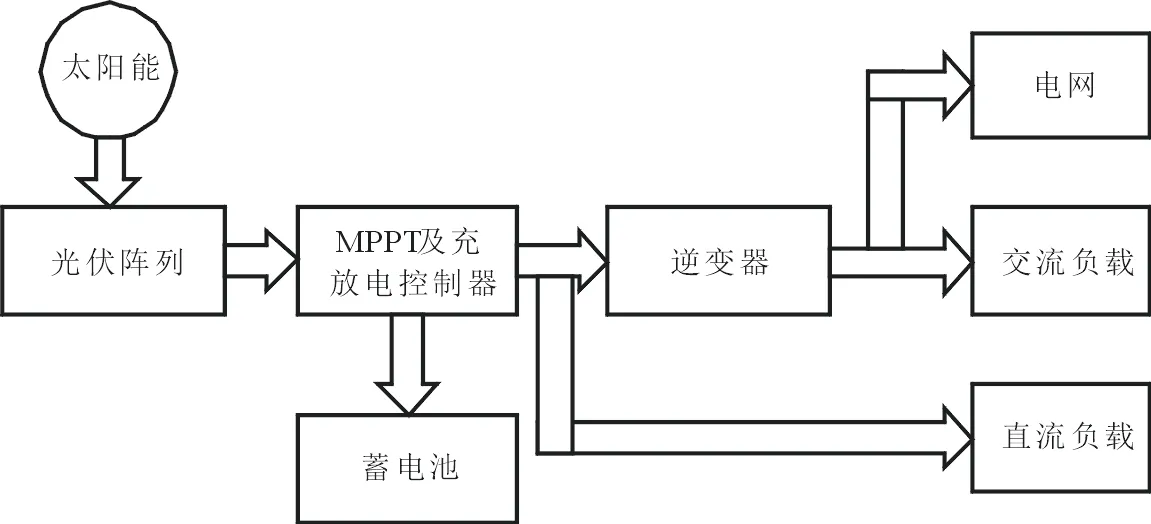
圖1 光伏發電系統結構框圖
通常應用較多的光伏電池等效電路模型如圖2 所示。
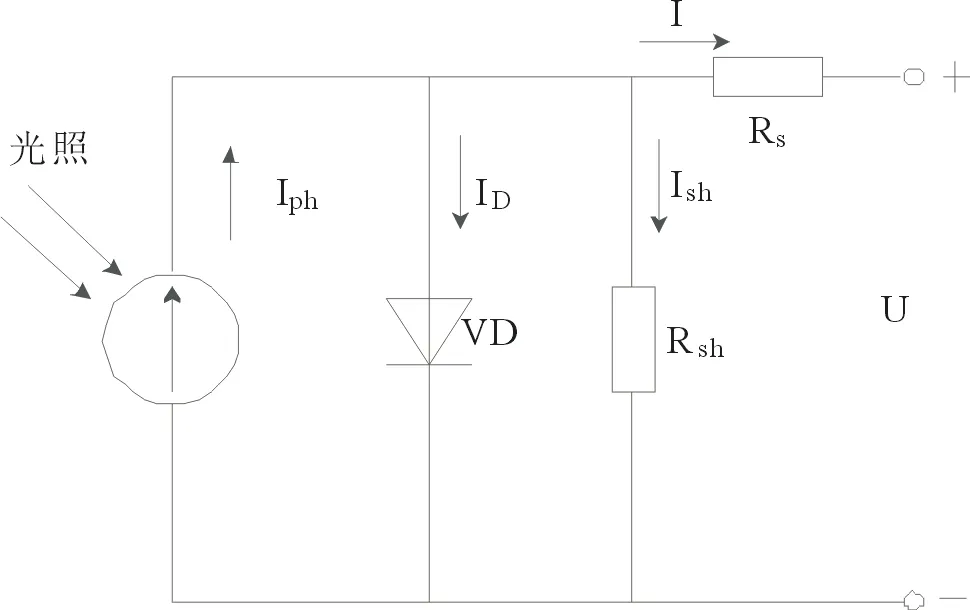
圖2 光伏電池等效電路模型
根據基爾霍夫定律,對圖2 進行分析可得:
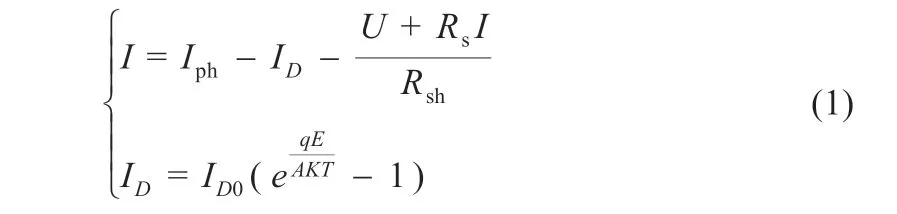
整理式(1)后,計算出等效模型輸出電流:

式中:IL為光伏電池陣列的輸出電流;Iph為光伏電池中存在的光生電流;Is為光伏電池P-N 結中反向時候的一個飽和電流;q為電子電荷數;Rs、Rsh為在等效電路中進行串聯及并聯時的電阻值;k為玻爾茲曼常數;T為光伏陣列環境的絕對溫度。
光伏電池的輸出特性如圖3 所示。
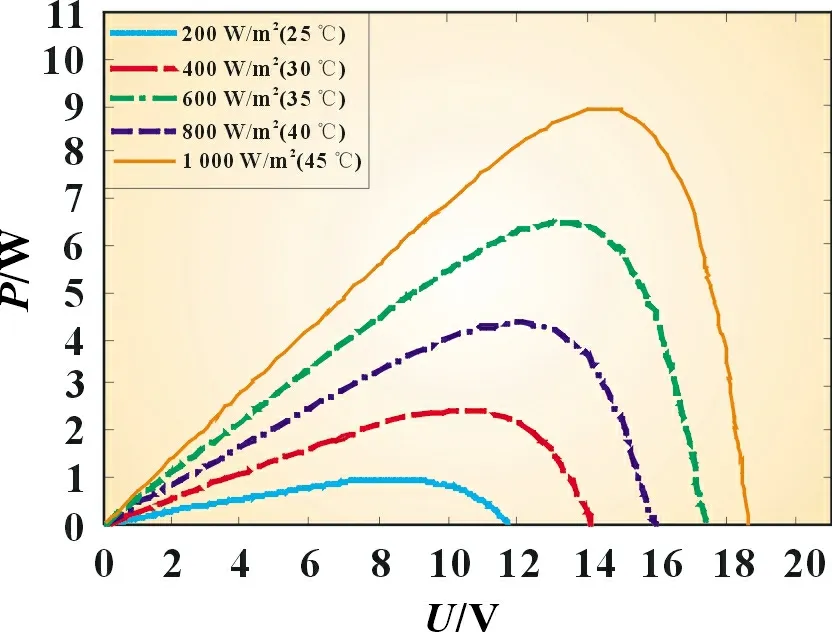
圖3 光伏電池的特性曲線
1.2 光伏并網逆變器結構
并網逆變器對光伏電池形成的直流電執行逆變,得到交流電,接著并入電網中,或者提供電能滿足交流負載的電能需求。在并網之前需要對光伏電池輸出的電壓進行升壓,一般使用Boost 升壓電路,常見的Boost 主電路如圖4 所示。
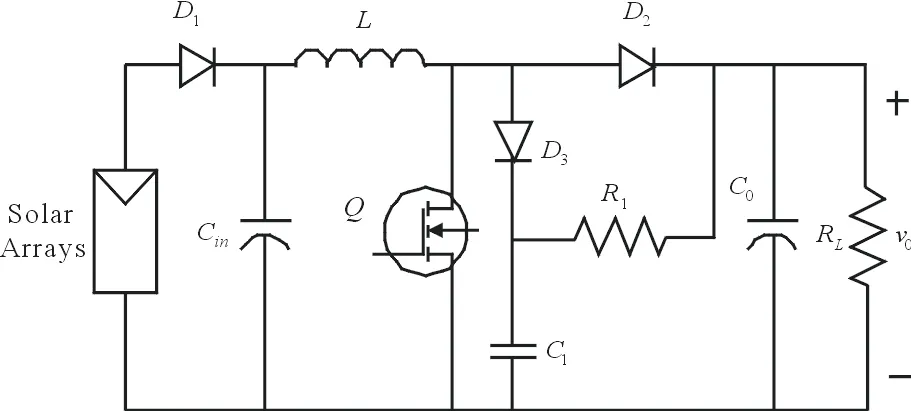
圖4 光伏電池的特性曲線
對光伏電池輸出的直流電執行升壓操作,接著在逆變器的作用下完成對直流電的逆變,得到交流電。光伏發電并網的核心就是通過逆變器實現電能的轉換,實現的主要電路包括直流升壓電路、濾波電路、逆變電路、主控電路、信號采集電路和保護電路等[2],如圖5 所示。
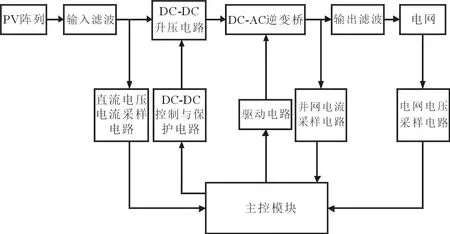
圖5 光伏并網逆變器的結構框圖
2 變步長擾動觀測法設計
2.1 MPPT 原理與跟蹤算法分析
為保障光伏發電系統處于最大輸出功率狀態下運行,需要分析輸出功率和光照、溫度以及負載等參數之間的關聯[3]。利用控制算法尋找到最大功率點的技術就是MPPT 技術[4]。基于輸出特性曲線的MPPT 控制原理如圖6 所示。

圖6 MPPT基本原理示意圖
擾動觀測法是根據功率和電壓之間的特性關系進行分析,對系統工作電壓施加擾動,電壓必然發生變化,計算所引起功率輸出的變化,根據得到的功率變化對工作電壓的方向進行調節,實現系統的最大功率點跟蹤控制[5-6],其過程如圖7所示。
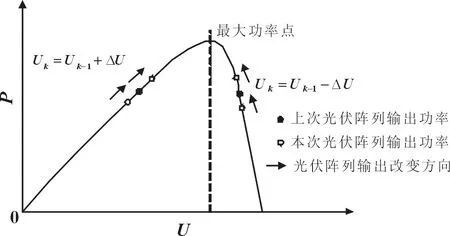
圖7 擾動觀測法基本原理
2.2 基于滯環比較的變步長擾動觀測法優化設計
為了避免輸出功率在最大功率點附近振蕩導致功率振蕩,需要對施加的電壓擾動步長精確控制,降低擾動步長對系統的動態和穩態性能的影響[7]。電壓擾動步長越小則精度越高,但是會降低跟蹤的速度,需要較長時間的跟蹤,影響到系統的效率;電壓擾動步長選取過大,雖然提高了跟蹤速度,但是會增加控制的難度和功率振蕩。本文為了克服傳統擾動觀察法存在的矛盾,利用帶滯環比較器對其進行優化。
將滯環比較的原理加入到擾動觀測法中,可以利用滯環對功率進行比較,利用增加一個滯環的方法實現對功率變化幅度的控制,利用滯環比較確定電壓擾動的步長范圍,可以克服電壓擾動觀測法的缺點,得到精確的電壓擾動步長,提高最大功率點跟蹤精度的同時,降低了由于電壓擾動引起的功率波動,避免出現功率變化方向判斷錯誤的情況。
基于滯環比較的變步長擾動觀測法優化實現的流程如圖8 所示。
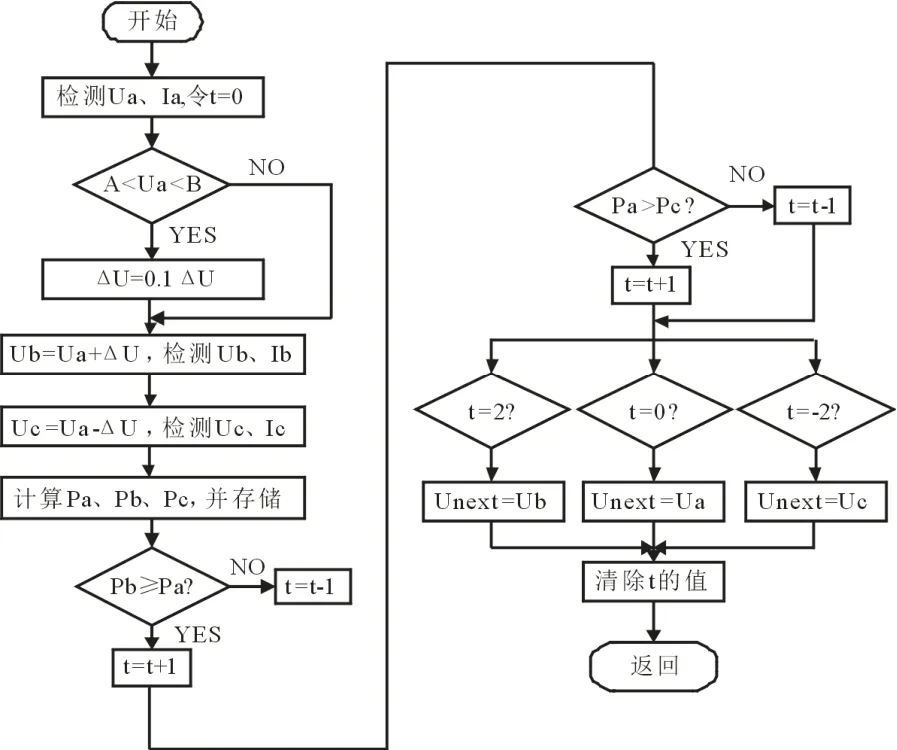
圖8 基于滯環比較的變步長擾動觀測法優化流程
3 并網逆變器控制策略研究
3.1 數字鎖相環分析
鎖相環主要是將光伏發電系統采樣得到的電網電壓進行鎖相,根據所得相位角計算得到并網逆變器輸出的并網電流,實現并網電流和電網電壓同頻同相。并網電表的相位利用相位指針Index 變量確定,并網電流的頻率由步進值Step確定,如圖9 所示。

圖9 并網電流鎖相環控制框圖
3.2 鎖相環技術與電壓前饋補償的復合控制策略
光伏發電并網一般采用的是電流跟蹤控制的控制策略,為了抑制光伏發電并網引起的電壓擾動,在電流內環控制策略中加入并網電壓前饋補償的控制,可以大大降低并網電壓波動對逆變器輸出的并網電流的影響。設計的基于電網電壓前饋補償的逆變器電流跟蹤控制如圖10 所示。圖中:GN(s)為電網電壓的前饋補償環節;Iref和Igrid分別為光伏發電系統逆變并網時的參考電流和實際逆變器的輸出電流;Gpi(s)和Ginv(s)分別為調節控制和逆變系統環節;GT(s)為濾波環節。
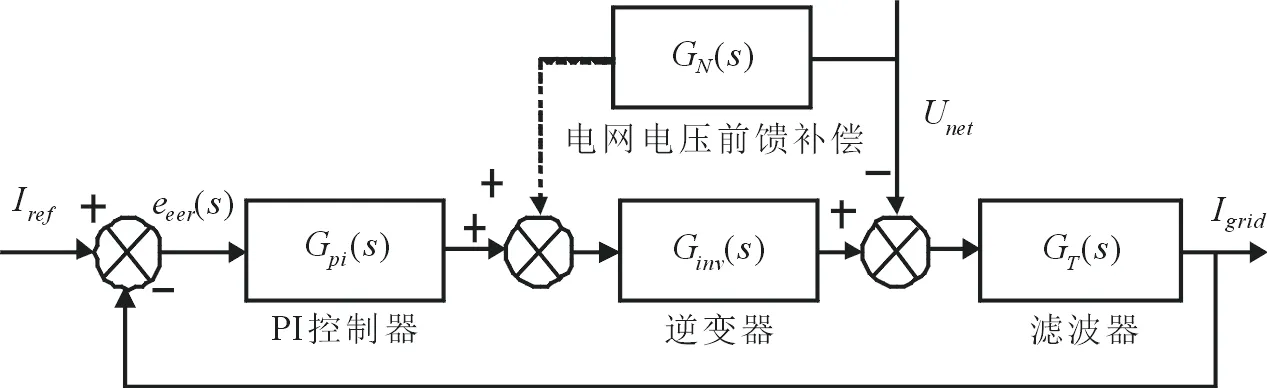
圖10 基于電網電壓前饋補償的逆變器電流跟蹤控制
利用基爾霍夫電壓定律(KVL)得到并網逆變器輸出的電壓平衡方程為:

對式(3)進行拉普拉斯變換可以得到:

在電網處于異常狀態時會出現電壓不對稱甚至畸變的現象,嚴重時會影響到光伏發電系統的正常運行。為了對電網電壓和并網逆變器輸出電流之間的波動關系進行研究,可以將電網電壓看作是系統的電壓擾動信號,可以對沒有施加電網電壓前饋補償時進行分析,得到并網電流Igrid的傳遞函數為:

未進行電網電壓補償的系統誤差為:

在電流跟蹤控制中加入電網電壓前饋補償后的系統誤差為:

在式(7)中,如果GN(s)=,則可以得到系統誤差eerr(s)=0。根據設計的電壓前饋補償的復合控制策略,加入電網電壓前饋補償后,可以降低電網電壓對光伏發電并網逆變器輸出電流的影響,在理論上可以實現完全補償。
4 仿真實驗結果分析
本文根據研究的變步長擾動觀察法MPPT 控制,在Matlab/Simulink 軟件環境中搭建光伏發電系統MPPT 的各控制模塊,對提出的最大功率點跟蹤和并網逆變器的控制策略進行仿真驗證,搭建的光伏發電系統并網和MPPT 控制策略的仿真模型如圖11 所示。

圖11 Matlab/Simulink中仿真模型
對MPPT 進行仿真需要結合搭建的Boost 電路,在系統的輸入和輸出模型中分別接入阻抗負載,對傳統的變步長觀測法和帶滯環比較的變步長擾動觀測法控制進行對比仿真研究,仿真模型中器件主要參數如下:電感L1、L2分別設置為1、10 H,三個電容分別設置為30、47、47 μF,IGBT 開關頻率為10 kHz,三個電阻分別設置為1 000、1 000、100 Ω,二極管最大正向電流為300 mA、最大正向電壓為1 V,比較器工作電壓為24 V、輸出電流為16 mA。
光伏發電系統在標準條件(25 ℃,1.0 kW/m2)下對傳統變步長擾動觀測法和滯環比較器的變步長擾動觀測法進行仿真比較。
首先確定最大功率點附近波動的范圍,設置的仿真時間為1 s,步長是ode45,分別對步長為0.03、0.004、0.002 時的功率變化進行測試,得到的仿真曲線如圖12 所示。
由圖12 可知步長為0.03 時達到最大功率點附近只需要0.10 s,但是振蕩較為劇烈;步長為0.002 時達到最大功率點的時間為0.68 s,用時較長;步長為0.004 時用時0.30 s,雖然沒有步長0.03 時快,但是振蕩較小。
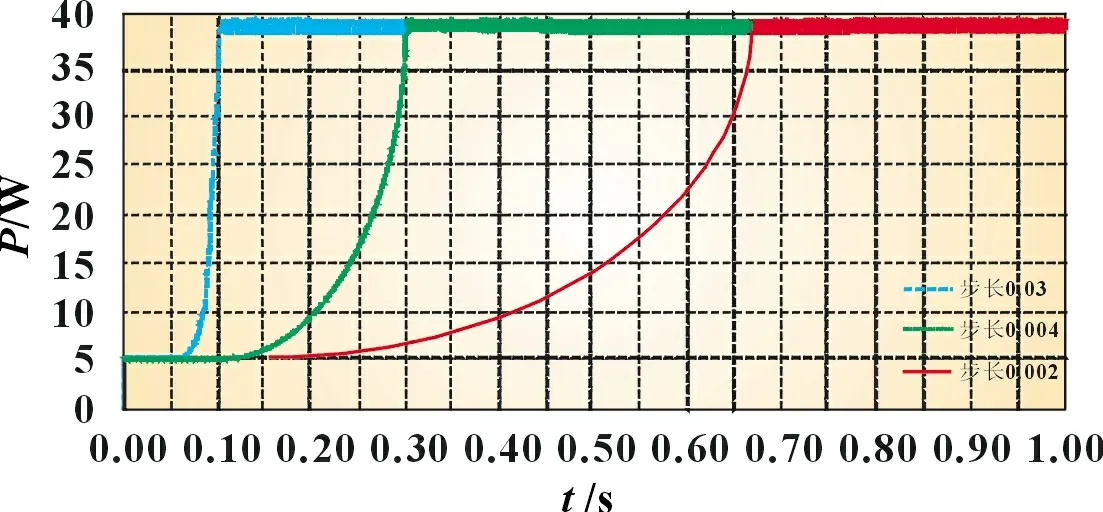
圖12 不同步長的功率變化曲線
為證明帶滯環比較器的變步長擾動觀測法的優越性,使用同樣的條件對傳統變步長擾動觀測法和帶滯環比較器的變步長擾動觀測法進行仿真對比,得到的仿真曲線如圖13所示。
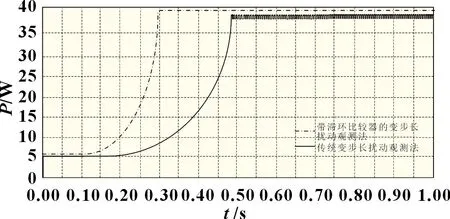
圖13 傳統變步長擾動觀測法和帶滯環比較器的變步長擾動觀測法功率變化曲線
由圖13 可知,帶滯環比較器的變步長擾動觀測法跟蹤到最大功率點附近的用時是0.30 s,傳統變步長擾動觀測法用了0.52 s 左右跟蹤到最大功率點,在跟蹤速度上帶滯環比較器的變步長擾動觀測法提高了40%以上,振蕩較小。帶滯環比較器的變步長擾動觀測法能夠跟蹤到40 W,傳統變步長擾動觀測法智能跟蹤到38.5 W,跟蹤精度提高了4.0%。
為了進一步驗證帶滯環比較器的變步長擾動觀測法進行MPPT 控制的效果,改變光照和溫度進行仿真對比,仿真設置主要是光照強度在0.4 s 時由800 W/m2(25 ℃)變為1 000 W/m2(25 ℃),溫度在0.7 s 由25 ℃(1 000 W/m2)變為42 ℃(1 000 W/m2),得到功率曲線如圖14所示。
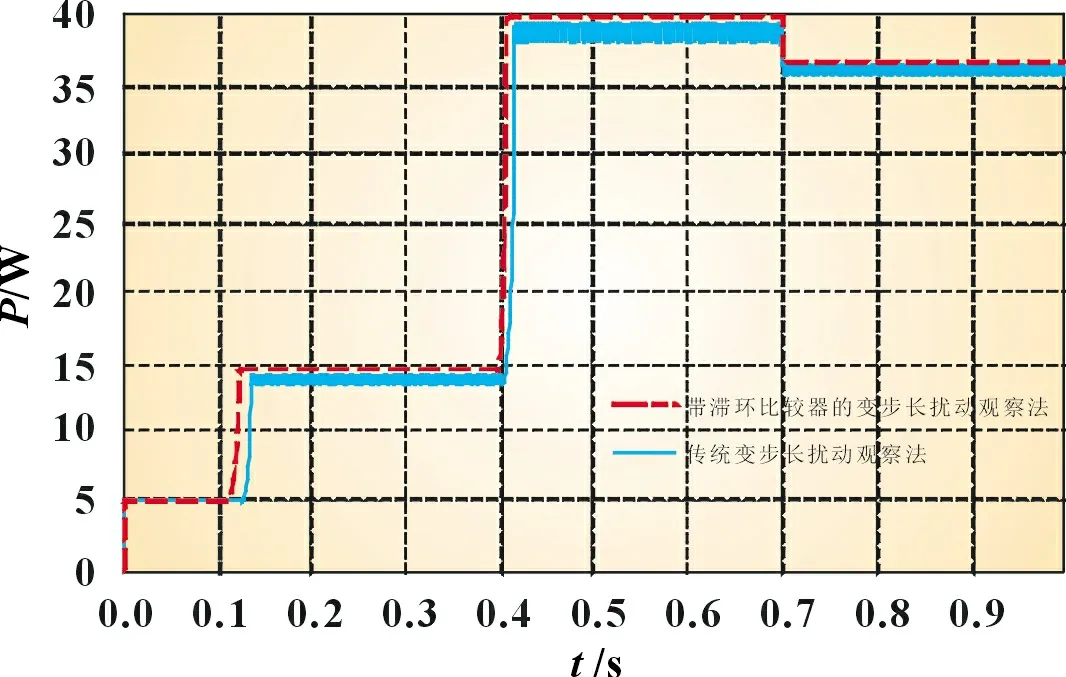
圖14 光照和溫度變化時的功率變化曲線
由圖14可以看出,在0.4和0.7 s光照強度和溫度分別發生變化時,帶滯環比較器的變步長擾動觀測法能夠快速跟蹤到光照強度變化后的最大功率點,而且振蕩較小,跟蹤速度較快。
得到基于電網電壓前饋補償的逆變器并網電流跟蹤電網電壓的波形,如圖15 所示。由圖15 可得并網電流和電網電壓的同頻同相,證明了并網電流能夠很好地跟蹤電網電壓,能夠實現跟蹤控制,而且并網電流的諧波含量較小,具有較高的并網電能質量。
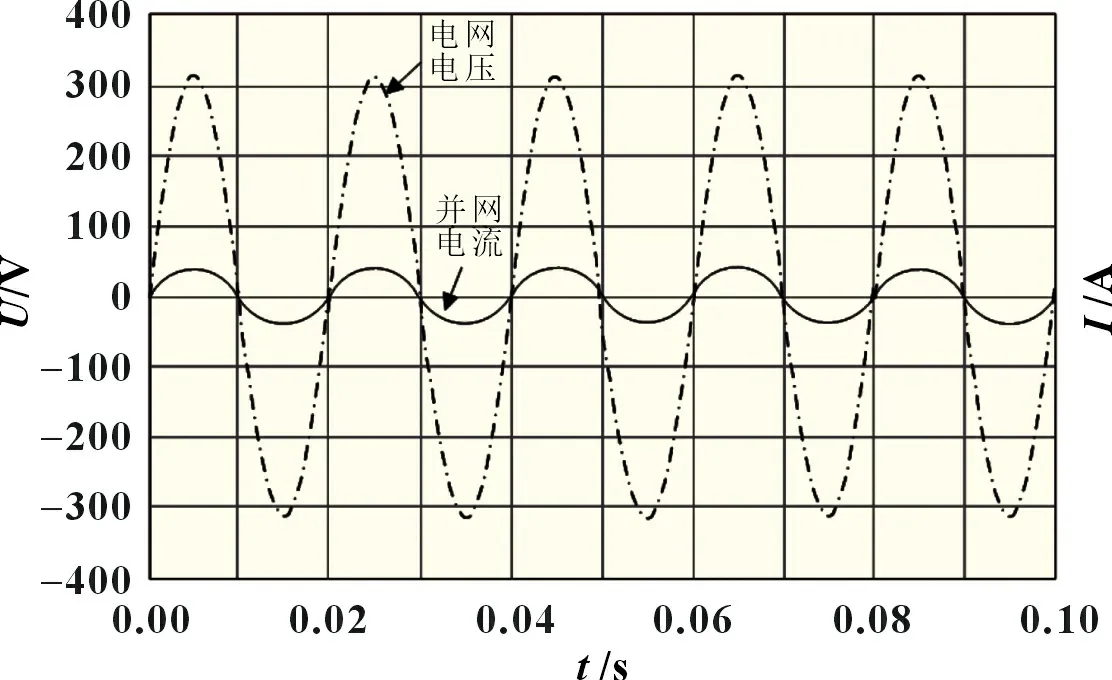
圖15 并網電流跟蹤電網電壓的波形
5 結論
本文對光伏發電系統并網中的關鍵控制技術進行了分析,重點研究了MPPT 和并網逆變器的控制策略。研究了光伏發電系統、Boost 升壓電路、帶滯環比較的變步長擾動觀測法和并網逆變器復合控制策略,并在Mablab/Simulink 中建立光伏發電并網系統仿真模型,對優化的變步長觀測法和逆變器控制進行了仿真,結果證明:在環境條件發生變化時,提出的帶滯環比較器的變步長擾動觀測法能夠快速精確地跟蹤到最大功率點,設計的基于電網電壓前饋補償的逆變器電流跟蹤控制策略能夠保證并網電流跟蹤電網電壓,具有較好的控制效果,滿足電網對并網電流的要求。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36