基于自抗擾的混合儲(chǔ)能系統(tǒng)控制策略
2023-02-17 07:21:46馬幼捷周雪松
電源技術(shù) 2023年1期
馬幼捷,張 超,周雪松
(1.天津理工大學(xué)電氣工程與自動(dòng)化學(xué)院,天津 300384;2.天津理工大學(xué)天津市復(fù)雜系統(tǒng)控制理論與應(yīng)用重點(diǎn)實(shí)驗(yàn)室,天津 300384)
隨著微電網(wǎng)技術(shù)的發(fā)展與應(yīng)用,光伏發(fā)電與儲(chǔ)能裝置結(jié)合已成為目前最典型的微電網(wǎng)應(yīng)用和示范形式。由于分布式電源輸出功率的間歇性和波動(dòng)性,很難維持微電網(wǎng)系統(tǒng)內(nèi)母線電壓的穩(wěn)定和能量的平衡,往往需要加入儲(chǔ)能系統(tǒng)來(lái)達(dá)到“削峰填谷”的效果。但是受儲(chǔ)能技術(shù)發(fā)展的限制,目前沒(méi)有任何一種單一的儲(chǔ)能技術(shù)可以同時(shí)滿(mǎn)足能量密度、功率密度和環(huán)境特性等多項(xiàng)指標(biāo),因此混合儲(chǔ)能系統(tǒng)的應(yīng)用有著很大的必要性。蓄電池和超級(jí)電容分別作為高能量密度和高功率密度型儲(chǔ)能設(shè)備,在技術(shù)性能上具有很強(qiáng)的互補(bǔ)特性,并在光儲(chǔ)微電網(wǎng)中得到了廣泛應(yīng)用[1-3]。
直流微電網(wǎng)中混合儲(chǔ)能系統(tǒng)的研究主要集中在系統(tǒng)內(nèi)不平衡功率分配以及直流變換器的協(xié)調(diào)控制策略方面。文獻(xiàn)[4-5]提出了利用濾波算法對(duì)系統(tǒng)內(nèi)不平衡功率進(jìn)行分頻處理,并對(duì)蓄電池和超級(jí)電容器的不同頻段功率分別進(jìn)行平抑;文獻(xiàn)[6]提出了一種考慮混合儲(chǔ)能各單元的工作特性以及充放電裕量,通過(guò)設(shè)定蓄電池和超級(jí)電容的工作閾值來(lái)提高系統(tǒng)的動(dòng)態(tài)響應(yīng)速度;文獻(xiàn)[7]利用虛擬阻抗和虛擬電壓源,實(shí)現(xiàn)了系統(tǒng)能量管理并減少了超級(jí)電容荷電狀態(tài)恢復(fù)對(duì)正常功率波動(dòng)補(bǔ)償效率的影響;文獻(xiàn)[8]提出了一種移動(dòng)平均濾波算法的自適應(yīng)能量控制策略,實(shí)現(xiàn)了系統(tǒng)內(nèi)能量均衡,提高了系統(tǒng)實(shí)用性與經(jīng)濟(jì)性。以上所提控制策略都是以PI 控制器為基礎(chǔ)的,PI 控制是基于實(shí)測(cè)值的滯后被動(dòng)反饋調(diào)節(jié),從某種程度上降低了系統(tǒng)的控制效果。
自抗擾控制最早由韓京清研究員提出,通過(guò)結(jié)合PID 天然抗擾與模型無(wú)關(guān)和現(xiàn)代控制理論狀態(tài)觀測(cè)的優(yōu)點(diǎn),從工程應(yīng)用角度出發(fā),使強(qiáng)非線性系統(tǒng)、強(qiáng)耦合系統(tǒng)得到了很好的控制。
本文對(duì)直流微電網(wǎng)中混合儲(chǔ)能系統(tǒng)控制策略進(jìn)行了改進(jìn),利用自抗擾控制代替?zhèn)鹘y(tǒng)PI 雙閉環(huán)控制,并針對(duì)擴(kuò)張狀態(tài)觀測(cè)器(ESO)環(huán)節(jié)引入了模糊自適應(yīng)控制,通過(guò)實(shí)驗(yàn)仿真驗(yàn)證了所提控制策略對(duì)于系統(tǒng)內(nèi)直流母線電壓和功率波動(dòng)平抑效果的正確性和有效性。
1 獨(dú)立光儲(chǔ)系統(tǒng)結(jié)構(gòu)
以獨(dú)立光儲(chǔ)直流微電網(wǎng)作為對(duì)象,其系統(tǒng)結(jié)構(gòu)如圖1 所示,其中光伏微源通過(guò)單向Boost 變換器與直流負(fù)載相連,蓄電池和超級(jí)電容組成復(fù)合型儲(chǔ)能系統(tǒng)并各自通過(guò)雙向DCDC 變換器與直流負(fù)載相連。直流負(fù)載兩端端電壓作為直流母線電壓Udc,可以清楚反映系統(tǒng)穩(wěn)定性和系統(tǒng)內(nèi)功率平衡。獨(dú)立型直流微電網(wǎng)的典型特性體現(xiàn)在與大電網(wǎng)沒(méi)有物理連接,可再生能源發(fā)電滲透率高、負(fù)荷波動(dòng)大,峰谷差、季節(jié)差較大,含調(diào)節(jié)能量平衡用的儲(chǔ)能系統(tǒng)等,因此系統(tǒng)內(nèi)直流母線電壓的穩(wěn)定和能量的平衡由光伏微源和混合儲(chǔ)能系統(tǒng)進(jìn)行協(xié)調(diào)控制[9]。系統(tǒng)內(nèi)能量供需流動(dòng)關(guān)系滿(mǎn)足:
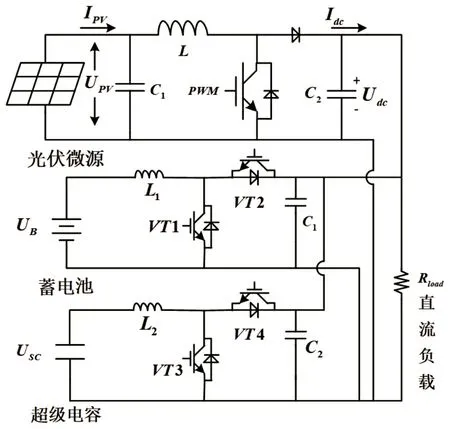
圖1 獨(dú)立光儲(chǔ)直流微電網(wǎng)結(jié)構(gòu)
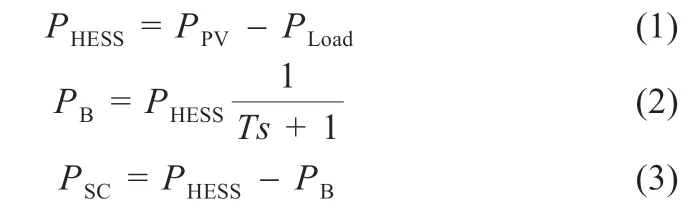
式中:PHESS為混合儲(chǔ)能系統(tǒng)吸收或發(fā)出的總功率;1/(Ts+1)表示低通濾波環(huán)節(jié),其中T為微分時(shí)間,s為微分算子。
2 雙向DC-DC 變換器建模
雙向DC-DC 變換器作為混合儲(chǔ)能系統(tǒng)的重要組成部分,承擔(dān)著能量在混合儲(chǔ)能系統(tǒng)中的雙向流動(dòng),通過(guò)對(duì)變換器不同開(kāi)關(guān)管占空比的控制,從而到達(dá)儲(chǔ)能單元的充放電任務(wù)。Boost 模式下雙向DC-DC 變換器的結(jié)構(gòu)如圖2 所示[10-11]。
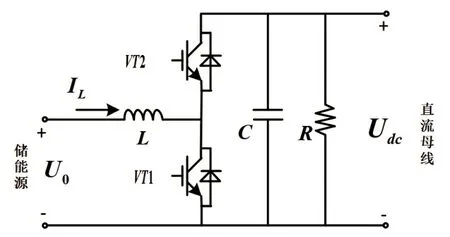
圖2 雙向DC-DC變換器結(jié)構(gòu)(Boost)
以蓄電池儲(chǔ)能源為例,通過(guò)控制開(kāi)關(guān)管VT1 和VT2 的占空比,實(shí)現(xiàn)變換器在Boost 和Buck 模式下的狀態(tài)切換。
2.1 Boost 模式下的數(shù)學(xué)模型
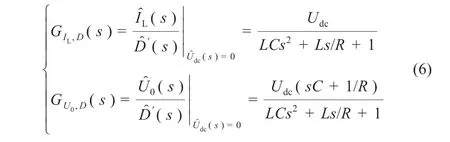
當(dāng)VT2 管關(guān)斷、VT1 管處于ton導(dǎo)通時(shí)間內(nèi),反并聯(lián)二極管D1、D2截止,儲(chǔ)能源工作在放電狀態(tài),抑制直流母線電壓降低。當(dāng)VT2 管關(guān)斷,VT1 處于toff關(guān)斷時(shí)間內(nèi),反并聯(lián)二極管D1截止、D2導(dǎo)通,電感電流起續(xù)流作用。以電感電流IL和直流母線電壓Udc為狀態(tài)變量,采用狀態(tài)空間平均法可得Boost模式下的狀態(tài)空間表達(dá)式:
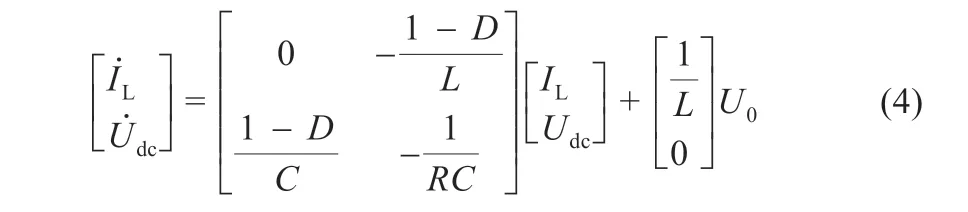
經(jīng)過(guò)小信號(hào)建模得到其傳遞函數(shù):
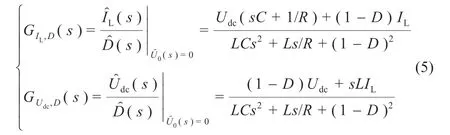
式中:D為開(kāi)關(guān)管VT1 的占空比,D=ton/(ton+toff)。
2.2 Buck 模式下的數(shù)學(xué)模型
同理,采用小信號(hào)建模可得Buck 模式下的傳遞函數(shù),其中D'為開(kāi)關(guān)管VT2 的占空比。
3 系統(tǒng)能量平衡控制策略
相較于一般控制器而言,自抗擾控制器最大的特點(diǎn)就是不依賴(lài)于被控對(duì)象的精確數(shù)學(xué)模型,可以實(shí)現(xiàn)對(duì)系統(tǒng)內(nèi)外擾動(dòng)的實(shí)施估計(jì)并進(jìn)行補(bǔ)償,具有很強(qiáng)的抗擾性和魯棒性。研究采用結(jié)合模糊自適應(yīng)的自抗擾電壓外環(huán)控制和基于自抗擾的電流內(nèi)環(huán)控制構(gòu)成雙閉環(huán)自抗擾控制策略對(duì)傳統(tǒng)雙閉環(huán)PI 控制策略對(duì)混合儲(chǔ)能系統(tǒng)進(jìn)行改進(jìn),以提高系統(tǒng)的動(dòng)態(tài)響應(yīng)速度和系統(tǒng)穩(wěn)定性。設(shè)計(jì)的混合儲(chǔ)能系統(tǒng)雙閉環(huán)控制策略結(jié)構(gòu)如圖3 所示[12-14]。

圖3 混合儲(chǔ)能系統(tǒng)雙閉環(huán)控制策略結(jié)構(gòu)
3.1 模糊自抗擾電壓外環(huán)控制器
直流微電網(wǎng)系統(tǒng)存在外部干擾和內(nèi)部參數(shù)不確定性,為了獲得穩(wěn)定的直流母線電壓和提高系統(tǒng)對(duì)于擾動(dòng)的抗擾性,設(shè)計(jì)了如圖4 所示的模糊自抗擾電壓外環(huán)控制器,控制器主要由跟蹤微分器(TD)、模糊擴(kuò)張狀態(tài)觀測(cè)器(F-ESO)、非線性誤差反饋控制律(NLSEF)、一階低通濾波器(First-Order Filter)四部分組成,其中,限流模塊的加入實(shí)現(xiàn)對(duì)蓄電池的過(guò)充保護(hù)。
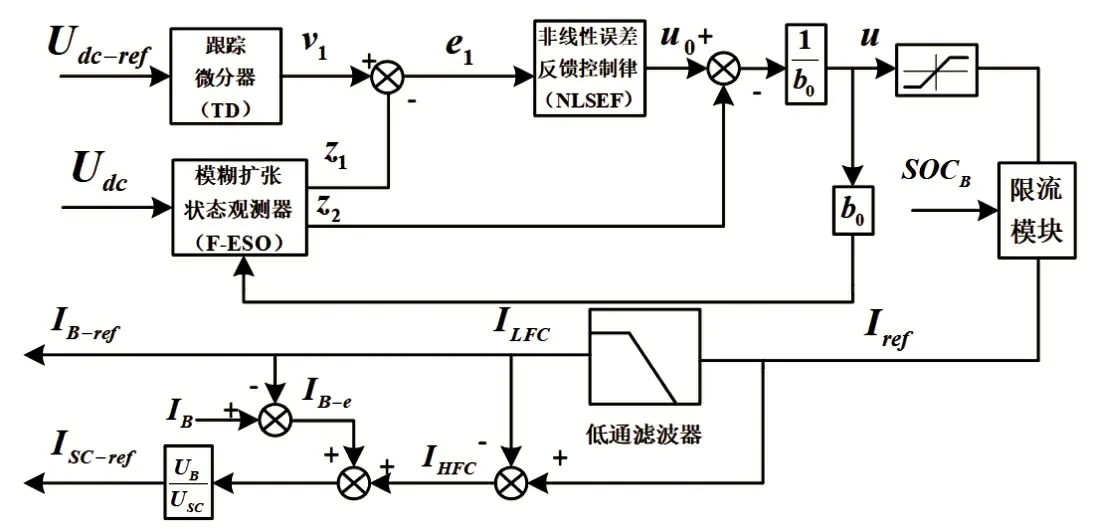
圖4 模糊自抗擾電壓外環(huán)控制器
3.1.1 跟蹤微分器
跟蹤微分器為直流母線電壓給定值Udc-ref安排過(guò)渡過(guò)程,使系統(tǒng)追蹤這個(gè)過(guò)渡過(guò)程,從而克服傳統(tǒng)PI 控制器中超調(diào)與快速性無(wú)法解決的矛盾,提高系統(tǒng)的魯棒性,其公式為:

式中:x0(t)為Udc-ref(t)的跟蹤值;α0為積分步長(zhǎng);r0、h0分別為函數(shù)控制參數(shù)速度因子和濾波因子;fst為最速綜合控制函數(shù)。
3.1.2 模糊擴(kuò)張狀態(tài)觀測(cè)器
模糊自適應(yīng)控制同自抗擾控制一樣,不依賴(lài)控制對(duì)象精確的數(shù)學(xué)模型,是主要利用模糊集合理論和模糊邏輯推理來(lái)解決實(shí)際工程問(wèn)題的一種策略。模糊控制器是一類(lèi)具有深度學(xué)習(xí)能力的控制系統(tǒng),通過(guò)模糊推理來(lái)學(xué)習(xí)系統(tǒng)內(nèi)部以及系統(tǒng)與外部的動(dòng)態(tài)關(guān)系,最終將模糊化的輸入值輸出為一個(gè)清晰值,其控制系統(tǒng)結(jié)構(gòu)如圖5 所示。
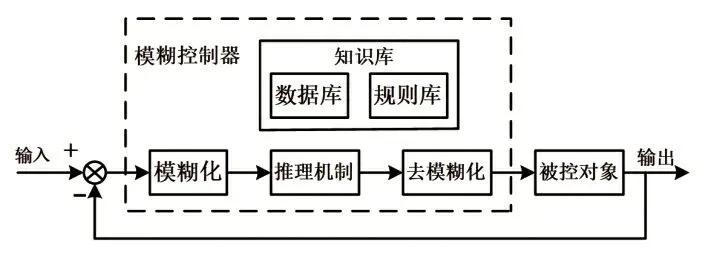
圖5 模糊控制系統(tǒng)結(jié)構(gòu)
擴(kuò)張狀態(tài)觀測(cè)器作為自抗擾控制器的核心環(huán)節(jié),對(duì)作用在系統(tǒng)動(dòng)力學(xué)模型上的系統(tǒng)內(nèi)部不確定性和外部擾動(dòng)作為一個(gè)擴(kuò)張狀態(tài)并在控制器中進(jìn)行補(bǔ)償。擴(kuò)張狀態(tài)觀測(cè)器的實(shí)現(xiàn)形式為:

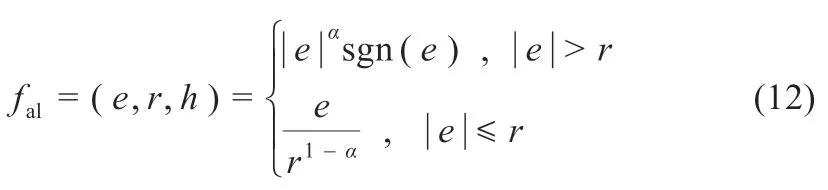
式中:β1、β2為擴(kuò)張狀態(tài)觀測(cè)器的輸出誤差校正參數(shù);b1為補(bǔ)償因子;fal為最優(yōu)控制函數(shù),其函數(shù)表達(dá)式如下,其中sgn 為符號(hào)函數(shù)。
系統(tǒng)所設(shè)計(jì)的模糊自適應(yīng)β的輸入為直流母線電壓給定值與真實(shí)值的誤差ε,以及其導(dǎo)數(shù),輸出為Δβ,即誤差參數(shù)β2的校正比例,最終輸出自適應(yīng)誤差校正參數(shù)β20=(1+Δβ)×β2,對(duì)應(yīng)的仿真模型如圖6 所示。
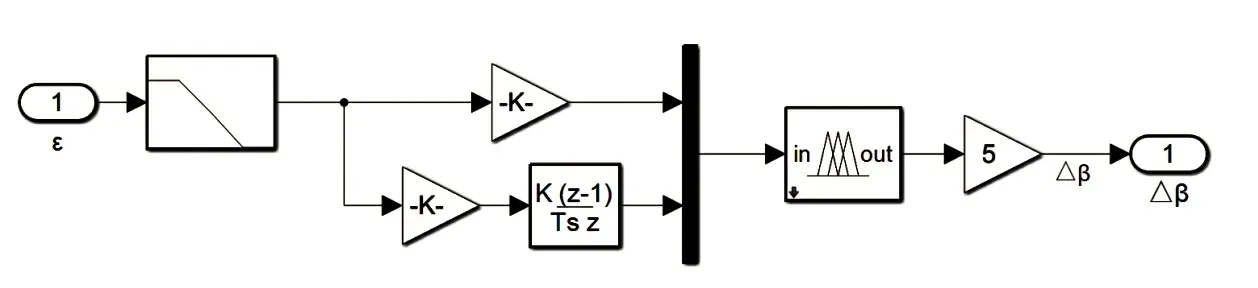
圖6 模糊控制器仿真模型
直流母線電壓誤差ε以及其導(dǎo)數(shù)經(jīng)過(guò)輸入增益Ke、Kec映射到模糊規(guī)則對(duì)應(yīng)的基本論域均為[-1.2,+1.2],Δβ的論域?yàn)閇+0.6,+1.0]。取模糊集為{NB,NM,NS,ZO,PS,PM,PB},各元素的含義分別為:負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大,隸屬度函數(shù)取為高斯形式。
根據(jù)工程實(shí)踐經(jīng)驗(yàn),設(shè)計(jì)的模糊規(guī)則表如表1 所示,當(dāng)誤差ε以及誤差微分較大時(shí),輸出較大的誤差校正比例Δβ,以加快反饋觀測(cè)響應(yīng)速度,提高系統(tǒng)動(dòng)態(tài)性能;當(dāng)誤差ε以及誤差微分較小時(shí),輸出較小的誤差校正比例Δβ,以適當(dāng)減小響應(yīng)的擾動(dòng),增強(qiáng)系統(tǒng)穩(wěn)態(tài)穩(wěn)定性,模糊控制器Δβ輸出曲面圖如圖7 所示。
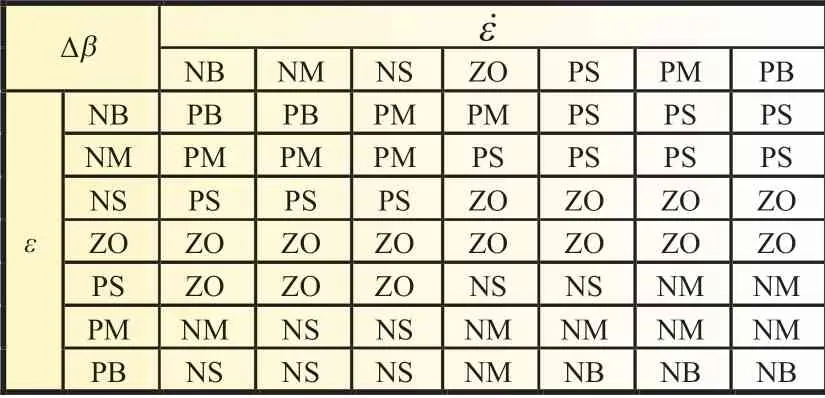
表1 Δβ的模糊控制規(guī)則
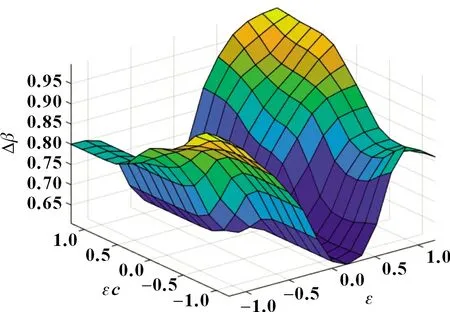
圖7 模糊控制器Δβ輸出曲面圖
3.1.3 非線性誤差反饋控制律
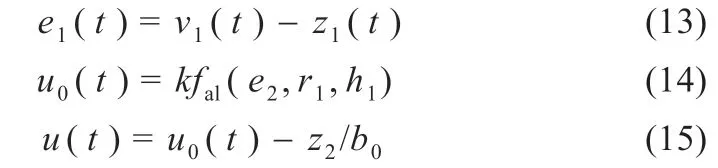
作為獨(dú)立于控制對(duì)象的非線性控制器,非線性誤差反饋控制律將跟蹤微分器與擴(kuò)張狀態(tài)觀測(cè)器進(jìn)行非線性組合,結(jié)合擾動(dòng)補(bǔ)償一起構(gòu)成系統(tǒng)控制量,其實(shí)現(xiàn)形式為:
3.1.4 低通濾波環(huán)節(jié)
模糊自抗擾電壓外環(huán)控制器通過(guò)整定直流母線電壓給定值Udc-ref與采樣值Udc,產(chǎn)生電流內(nèi)環(huán)總參考電流值Iref,再經(jīng)一階低通濾波器生成低頻分量ILFC,從而得到蓄電池電流內(nèi)環(huán)參考電流值IB-ref。由于延遲效應(yīng)的存在,蓄電池電流內(nèi)環(huán)采樣值IB與參考值IB-ref存在響應(yīng)誤差電流IB-e,即蓄電池未能補(bǔ)償?shù)哪芰浚?/p>

由超級(jí)電容進(jìn)行補(bǔ)償,從而得到超級(jí)電容電流內(nèi)環(huán)參考信號(hào):

3.2 自抗擾電流內(nèi)環(huán)控制器
根據(jù)系統(tǒng)設(shè)計(jì)要求,蓄電池、超級(jí)電容自抗擾電流內(nèi)環(huán)控制器結(jié)構(gòu)基本相似,主要由跟蹤微分器、擴(kuò)張狀態(tài)觀測(cè)器和非線性誤差反饋控制律三部分組成,控制器結(jié)構(gòu)如圖8 所示,輸出為占空比信號(hào)yD。
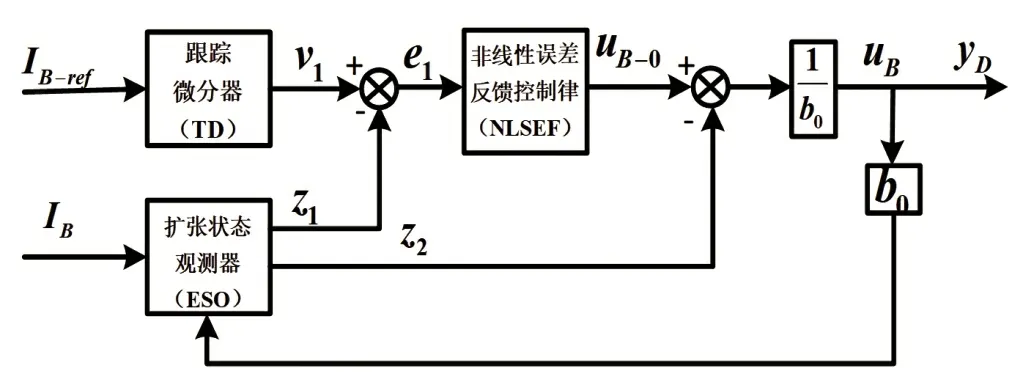
圖8 自抗擾電流內(nèi)環(huán)控制器
4 仿真驗(yàn)證分析
為驗(yàn)證基于擴(kuò)張狀態(tài)觀測(cè)器的混合儲(chǔ)能系統(tǒng)模糊自適應(yīng)控制的正確性與有效性,利用Matlab/Simulink 仿真平臺(tái)搭建了含混合儲(chǔ)能的離網(wǎng)型光伏微電網(wǎng)仿真模型,并在不同工況模式下進(jìn)行了仿真分析,系統(tǒng)部分仿真參數(shù)如下:直流母線電壓參考值設(shè)為600 V;蓄電池電壓100 V,容量120 Ah;超級(jí)電容電壓50 V,容量30 F;蓄電池初始荷電狀態(tài)(SOC)為50%;光伏陣列的初始溫度為25 ℃;濾波器的時(shí)間常數(shù)為0.02。
對(duì)于直流微電網(wǎng)而言,輸出的直流母線電壓波形平滑程度決定電能質(zhì)量的好壞;對(duì)于自抗擾控制器而言,擴(kuò)張狀態(tài)觀測(cè)器作為其核心部分,對(duì)于系統(tǒng)總擾動(dòng)的補(bǔ)償狀態(tài)體現(xiàn)了自抗擾控制器的最本質(zhì)功能。為得到清晰的驗(yàn)證結(jié)果,系統(tǒng)設(shè)定仿真運(yùn)行工況為:(1)初始狀態(tài)下,光伏系統(tǒng)始終運(yùn)行在最大功率點(diǎn)跟蹤(MPPT)狀態(tài),光伏電池初始標(biāo)況為溫度25 ℃、光照強(qiáng)度900 W/m2,初始負(fù)荷為60 kW;(2)t=0.15 s 時(shí),光照強(qiáng)度增加到1 200 W/m2;(3)t=0.3 s 時(shí),光照強(qiáng)度減少至600 W/m2,20 kW 負(fù)載切除運(yùn)行;(4)t=0.45 s 時(shí),40 kW 負(fù)載投入運(yùn)行。仿真結(jié)果如圖9 所示。
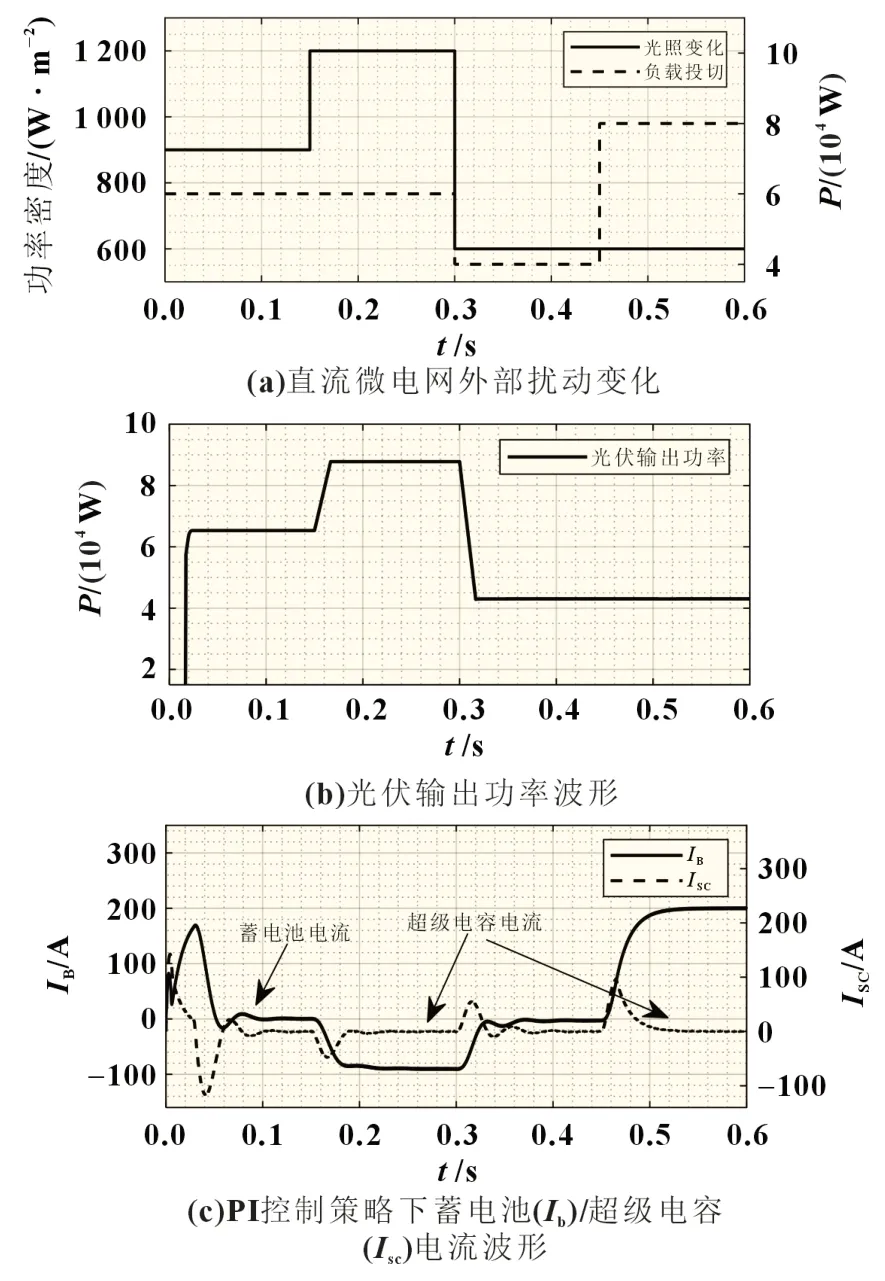
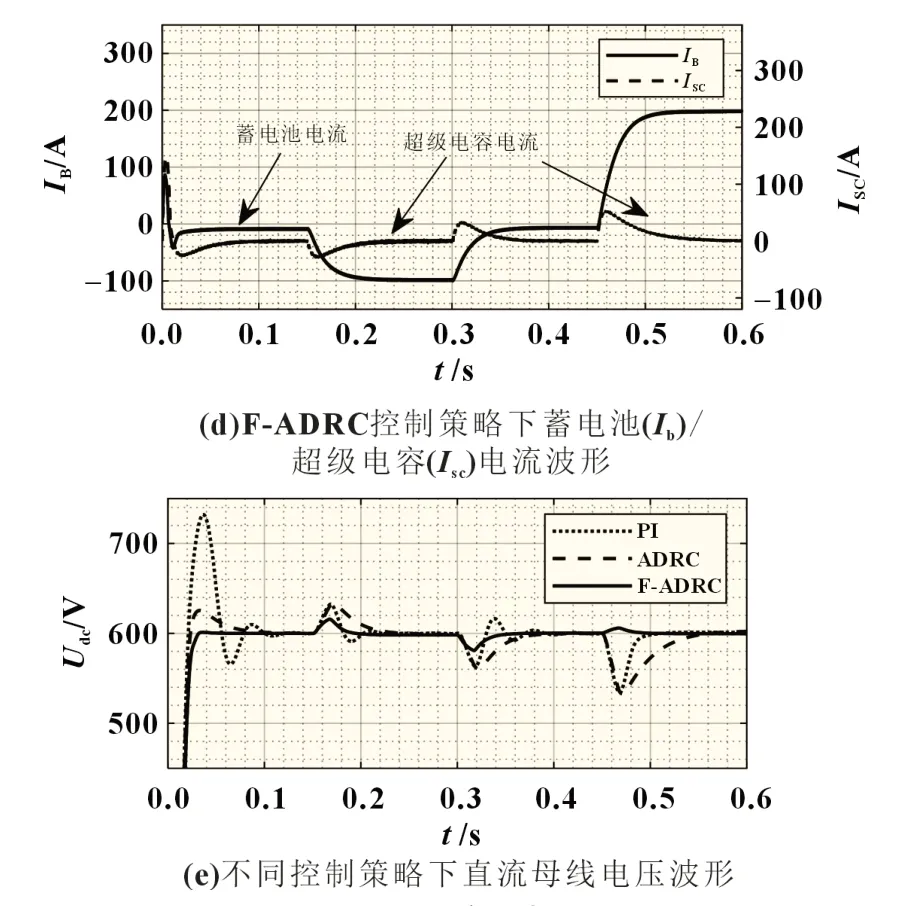
圖9 系統(tǒng)仿真結(jié)果
由系統(tǒng)仿真結(jié)果可以看出,相比于PI控制,模糊自抗擾控制(F-ADRC)策略下蓄電池/超級(jí)電容充放電電流曲線更加平滑、電流抖動(dòng)較小,這主要是由于直流微電網(wǎng)屬于強(qiáng)非線性系統(tǒng),基于線性化的PI 調(diào)節(jié)控制很難達(dá)到滿(mǎn)意的控制效果。由圖9(e)可以看出,相同外部擾動(dòng)下,PI 控制的最大超調(diào)量為23%,約為ADRC 控制最大超調(diào)量的4 倍,而F-ADRC 控制超調(diào)量最小,調(diào)節(jié)時(shí)間最快,對(duì)于系統(tǒng)而言有著更好的魯棒性及抗干擾性。其主要原因是ESO 實(shí)現(xiàn)了系統(tǒng)外部擾動(dòng)的實(shí)時(shí)估計(jì)并進(jìn)行了補(bǔ)償,系統(tǒng)所設(shè)計(jì)的F-ESO作為F-ADRC最核心部分,其性能直接決定了系統(tǒng)的控制效果,F(xiàn)-ESO 的性能如圖10所示[14]。
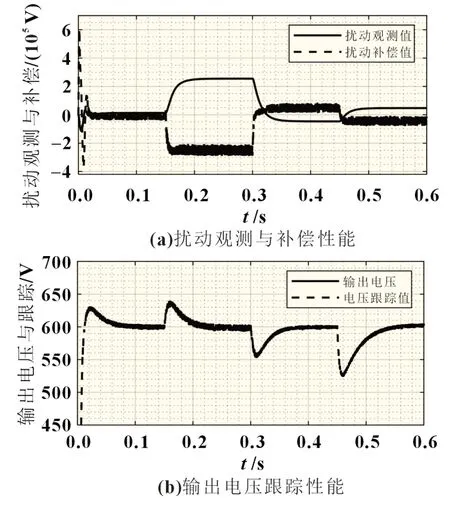
圖10 F-ADRC 觀測(cè)和跟蹤性能
由圖10(a)分析得,系統(tǒng)擾動(dòng)觀測(cè)值z(mì)2與擾動(dòng)補(bǔ)償值幅值基本一致,方向相反,實(shí)現(xiàn)了F-ADRC 控制器對(duì)于誤差的實(shí)時(shí)估計(jì)與補(bǔ)償?shù)脑O(shè)計(jì)要求。由圖10(b)分析得,系統(tǒng)電壓跟蹤值z(mì)1與系統(tǒng)輸出電壓波形基本重合,實(shí)現(xiàn)了對(duì)輸出電壓Udc的實(shí)時(shí)觀測(cè),驗(yàn)證了F-ADRC 控制器的良好跟蹤性能。
5 結(jié)論
本文針對(duì)獨(dú)立光儲(chǔ)直流微電網(wǎng)系統(tǒng)強(qiáng)非線性結(jié)構(gòu)以及存在外部擾動(dòng)的情況,利用自抗擾雙閉環(huán)控制策略替代了傳統(tǒng)線性PI 控制,提出了一種基于自抗擾的混合儲(chǔ)能系統(tǒng)模糊自適應(yīng)控制策略,使用模糊邏輯理論根據(jù)系統(tǒng)偏差實(shí)現(xiàn)了控制器的參數(shù)自整定。通過(guò)理論分析和仿真結(jié)果表明,驗(yàn)證了所設(shè)計(jì)的模糊自抗擾控制器具有良好的控制性能,有效減小了母線電壓恢復(fù)時(shí)間,增強(qiáng)了混合儲(chǔ)能系統(tǒng)平抑直流微電網(wǎng)功率波動(dòng)能力,所設(shè)計(jì)的控制策略對(duì)于系統(tǒng)動(dòng)態(tài)干擾具有較強(qiáng)的抗擾性和魯棒性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26