基于S3MPR拓撲和擾動觀察法的空間電源系統研究
2023-02-17 07:21:46司佳佳王利然
電源技術 2023年1期
關鍵詞:信號
司佳佳,王利然,張 璇,蔣 碩
(中國空間技術研究院通信衛星事業部,北京 100094)
在航天領域,國內衛星電源系統的功率調節系統絕大部分都采用直接能量傳輸(DET)方式,即將太陽電池陣功率直接饋送給負載的方式。DET 方式中,太陽電池陣的工作點必須設置在壽命末期(EOL)處,這樣只能保證EOL 期太陽電池陣輸出功率得到最大利用,而不能充分利用壽命初期(BOL)太陽電池陣的最大功率輸出。但近年來由于對月球、火星、水星等深空探測浪潮的回歸,電推進技術的成熟,新型有效載荷對高功率的需求,以及國內外航天產業對面向成本設計日益增長的追求,使得最大功率點跟蹤(MPPT)技術重新獲得了關注和應用。
1 MPPT 簡介
1.1 MPPT 原理與算法
太陽電池陣輸出功率調節分為并聯調節和串聯調節兩大類。在并聯調節系統中,太陽電池陣的參考工作點通常按照壽命末期的光強和穩定條件進行設計,主要考慮輻照損失、溫度等條件的影響。因此,采用固定參考工作點不能使太陽電池陣輸出功率最大。在這種條件下,采用MPPT 方式,按照負載功率需求控制太陽電池陣輸出功率,可以最大限度利用太陽電池陣輸出功率[1]。
MPPT 技術的原理可以表述為:在最大功率點時,太陽電池陣的靜態和動態阻抗是相等的,即電壓(V)與電流(I)及其變化量dV、dI的關系可表示為式(1)。

式(1)說明,在對太陽電池陣施加一定擾動的情況下,如果輸出電壓的變化量與輸出電流的變化量相等,則表明太陽電池陣已處于最大功率點(Pmax)處。
常用的MPPT 算法有:電壓回授法、功率回授法、擾動觀察法、增量電阻法、三點相位比較法、直線近似法和實際測量法[2]。各種MPPT 算法的優缺點總結如表1 所示。
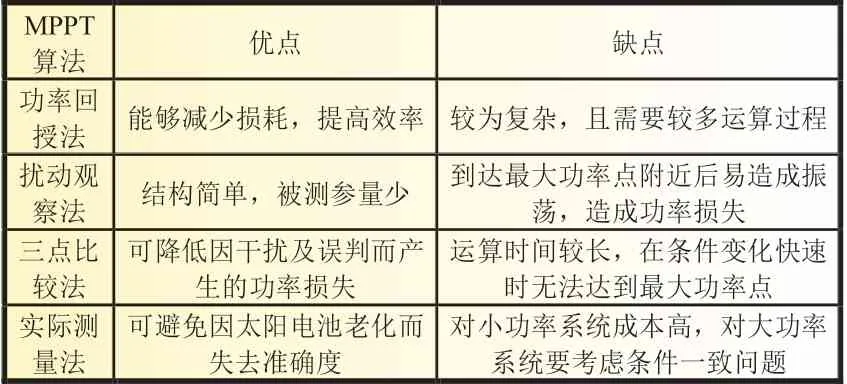
表1 MPPT 算法比較
擾動觀察法相比于其他算法,結構簡單,測量參量少,適合航天應用領域,國外多個航天器均采用該算法。擾動觀察法自有的振蕩問題可以通過飽和擾動的方法進行改進,在此不再贅述。
1.2 MPPT 電源系統拓撲結構
國外已經獲得空間應用的MPPT 電源系統拓撲結構可分為兩類。
(1)傳統MPPT 拓撲結構
歐洲航天局(ESA)研制的RADARSAT-2 雷達衛星、SWARM 衛星系統、Mars Express 火星快車、Venus Express 金星快車,意大利宇航局的AGILE 小衛星、韓國的STSAT-3 小衛星等均已應用了MPPT 電源系統。這些衛星采用的是傳統的MPPT 拓撲結構,輸出不調節母線。太陽電池陣串聯升壓或降壓DC/DC 變換器,傳感器檢測太陽電池陣電壓或電流、母線電壓或蓄電池充電電流,作為MPPT 模塊的輸入信號,MPPT 模塊根據輸入信號判斷太陽電池陣的工作狀態,產生相應的PWM 信號,控制DC/DC 變換器調整太陽電池陣的工作點,跟蹤其最大功率點。
近年來國內外多個機構都在對MPPT 控制方式進行研究,MPPT 電源拓撲結構開始逐漸應用到微小衛星中,比如ClydeSpace 公司研制的立方體衛星等。
ClydeSpace 公司研制的立方體衛星電源系統如圖1 所示。該電源系統有3 路電池陣輸入,每一路都有控制器實現MPPT 功能。太陽電池陣為供電陣和充電陣合一,蓄電池充電還是放電取決于負載所需的電流大小。衛星同樣采用單一不調節母線,兩路二次母線分別為3.3 和5 V,輸出端有過流保護,防止某一路輸出出現問題將母線電壓拉低,導致衛星欠壓斷電的情況發生。
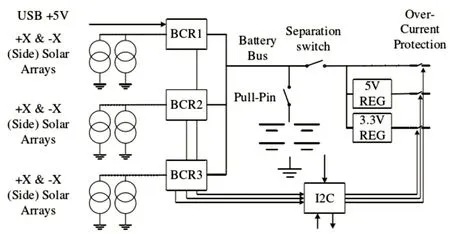
圖1 ClydeSpace公司立方體衛星電源系統拓撲結構
(2)S3MPR 拓撲結構
ESA 在2008 年1 月宣布了采用電推進系統的BepiColombo 水星探測計劃,空間環境和電推進裝置對電源系統有了獨特的要求:提供一個可靠的100 V 全調節母線,負載可達到14 kW。ESA 為BepiColombo 選擇了峰值功率跟蹤技術來控制電源系統。概括來說,BepiColombo 電源系統就是利用S3R 調節器和MPPT 模塊將太陽電池陣控制在最大功率點工作,然后用升壓變換器獲得100 V 母線。這個新型拓撲結構被稱為順序開關分流最大功率調節器(sequential switching shunt maximum power regulator,S3MPR)[3],其拓撲結構如圖2 所示。
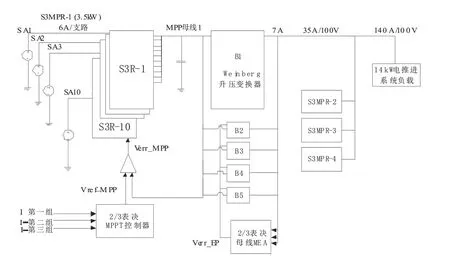
圖2 BepiColombo 探測器的電源系統拓撲結構
相比于傳統的MPPT 系統,S3MPR 具有很大的優勢,能夠保持太陽電池陣始終輸出最大功率。首先,太陽電池陣的峰值功率電壓并不依賴于負載的變化,而是通過控制太陽電池分陣的通斷來調節輸出功率,匹配精度能夠達到1%,當負載功率由最大變為0 時,太陽電池陣上不會出現過壓。其次,S3MPR 具有很高的功率質量比:S3R 部分約為5 kW/kg,升壓變換器部分約為2 kW/kg。
目前國內外關于S3MPR 的算法研究與應用只是針對太陽電池陣最大功率輸出電壓在小范圍變化的場合,在輸出電壓電流范圍較大時已有控制方式難以保證全范圍MPPT 的精確跟蹤,而且母線紋波較大,不利于后級變換器的穩定控制。
國內目前在對部分型號的方案論證中已采用MPPT 電源控制技術,本文基于擾動觀察法,設計了最大功率點跟蹤控制器,并與分流調節系統進行了聯合仿真,驗證最大功率算法的有效性和S3MPR 拓撲電路的正確性。
2 S3MPR 系統設計
S3R 系統的參考給定電壓往往是確定的,通過MEA 電路形成閉環調節,保證母線電壓穩定。然而航天器在空間不同條件下飛行時,光照與溫度變化較大,太陽電池陣的最大功率點也會發生較大變動,恒定的母線電壓會造成太陽電池陣功率的較大浪費,因此本文參考BepiColombo 的S3MPR 設計思路,通過調節母線電壓來達到最大功率點。本文的S3MPR由兩部分組成,S3R 順序開關分流調節器和MPPT 控制器。S3R 調節器的參考電壓由MPPT 控制器獲得,而不是傳統S3R 調節器用的固定的穩壓管做基準,拓撲結構如圖3 所示。
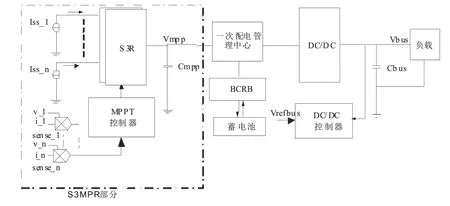
圖3 S3MPR系統框圖
2.1 S3R 主要電路設計
S3R 主電路可以分為三部分:SAR 電路、MEA 產生電路和滯環比較器。太陽電池陣輸出的電流經SAR 電路連接至地,作為S3R 的分流電路;MEA 信號產生電路將MPPT 控制信號與Vmpp 總線反饋信號進行PI 調節后送至滯環比較器部分,輸出的信號作為SAR 中MOSFET 的開關信號,以確定是否對地分流。具體電路的設計如下。
2.1.1 SAR 電路設計
電路設計為兩路并聯的分流調節器,分流調節器調節太陽電池陣的輸出功率,耗散太陽電池陣多余功率,保持輸出功率為太陽電池陣的最大功率,同時使供電母線電壓連續受調,實現多余電流對地分流的功能。兩路分流器的優先級由滯環控制信號給定。分流調節器采用驅動方式簡單、快速開通關斷的功率MOSFET,采用由放大器構成的推挽式電路進行驅動,如圖4 所示。
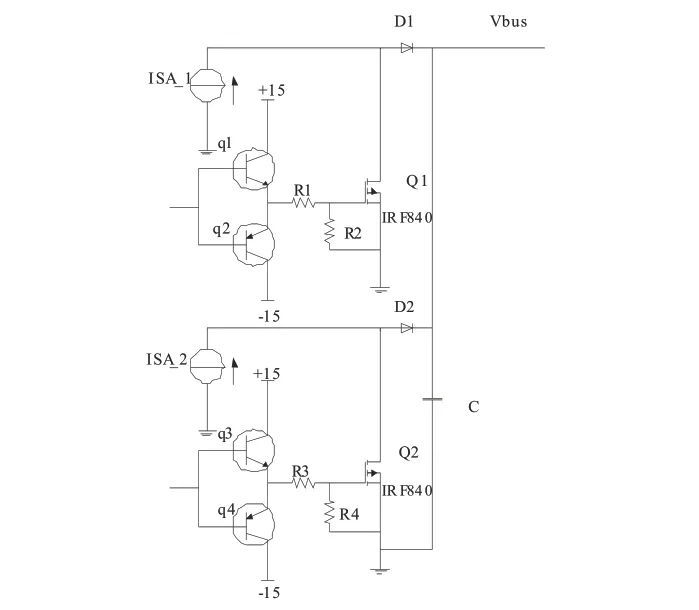
圖4 兩路并聯的分流調節器
2.1.2 MEA 信號產生電路設計
MEA 信號產生電路[4]主要由母線分壓、三路PI 調節、3∶2表決和電壓跟隨器幾部分組成,由于MEA 信號是整個電源控制系統的核心,在電源控制系統中起著至關重要的作用,為了提高系統的可靠性,這里采用三路PI 調節和3∶2 表決電路來獲得MEA 信號,如圖5 所示。
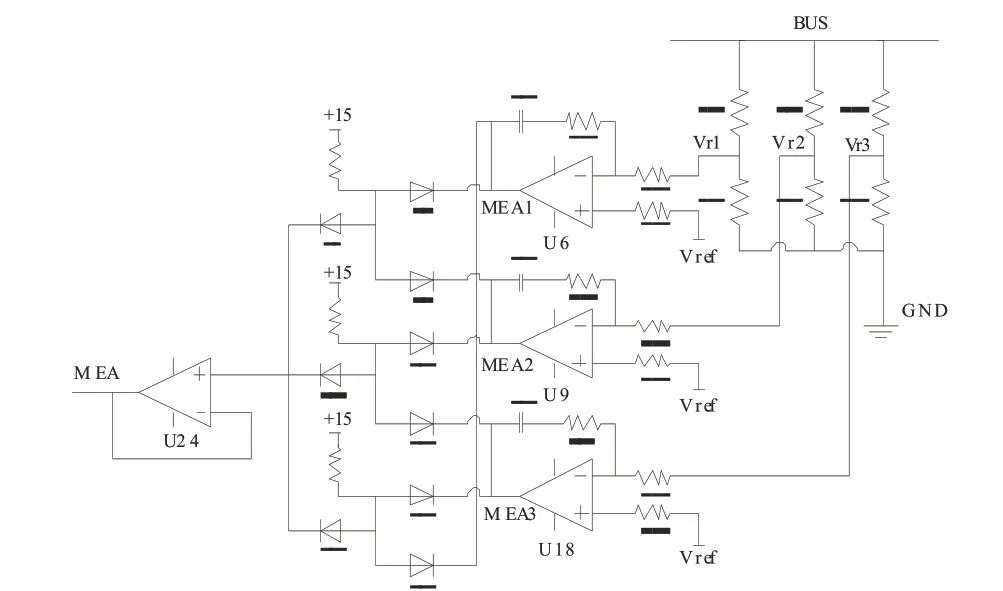
圖5 MEA信號產生電路
2.1.3 滯環比較器設計
本文設計為兩路太陽電池單元供電,每路太陽電池單元都對應一個滯環比較器。本文所設計的滯環給定偏置是由R4、R5、R6、R7 從母線分壓所得,因此不帶死區,電壓調節平滑,比較器輸出控制信號經過NPN 與PNP 組成的推挽式電路增加了對分流調節器的驅動能力,無需其他附加的驅動電路,直接驅動分流MOSFET,如圖6 所示。
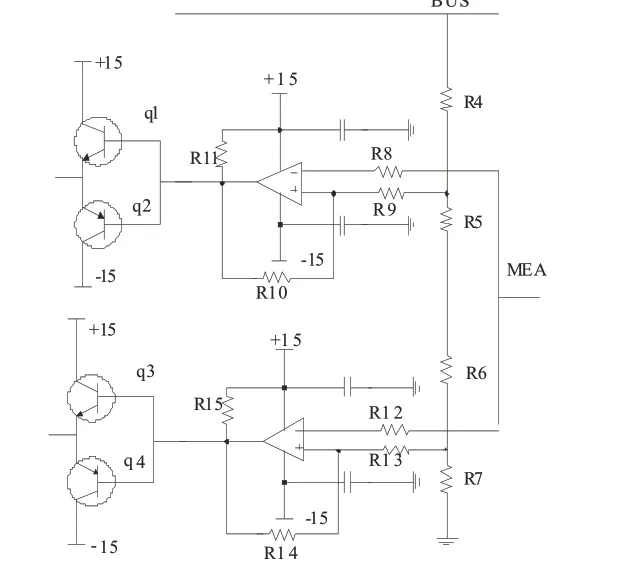
圖6 母線滯環比較器
2.2 MPPT 控制器設計
S3MPR 最大功率跟蹤采用擾動觀察法,其中,太陽電池陣被分為n個太陽電池單元,每個太陽電池單元之間相互獨立。S3MPR 最大功率跟蹤的核心思想就是讓每個處于向負載供電狀態的太陽電池單元都工作在最大功率點上,最終實現在滿足負載功率需求的前提下,處于負載供電狀態的太陽電池單元數目最少。
若檢測所有向負載供電的太陽電池單元的端電壓與電流,實現較為困難且經濟性差。最大功率跟蹤控制器需要去除向電池供電的單元和未滿電流輸出的單元,并要計算滿電流輸出單元的功率平均值,控制復雜、計算量大。針對上述缺點,在太陽電池單元相互差別不大,無特別輕載狀況下(即母線控制環中最底層的太陽電池單元能滿電流輸出),可對上述算法進行簡化:只檢測母線控制環中最底層的太陽電池單元Iss_1 的端電壓v_1 與輸出電流i_1,檢測信號由傳感器sense_1 送入最大功率控制器,計算其功率,并以之為標準決定擾動方向與S3R 的輸入給定值。
當擾動觀察法達到最大功率穩態時,系統仍會在最大功率點附近震蕩。震蕩會使系統在穩態時的MPP 輸出降低。本文設計的MPPT 算法中有一個符號(Sgn)判斷過程,即在穩態時最大功率點附近如果MPPT 算法中符號多次出現正負變化則停止擾動觀察,而以恒定的充電控制信號作為MPPT 輸出。
基于擾動算法的最大功率點跟蹤流程如圖7 所示。
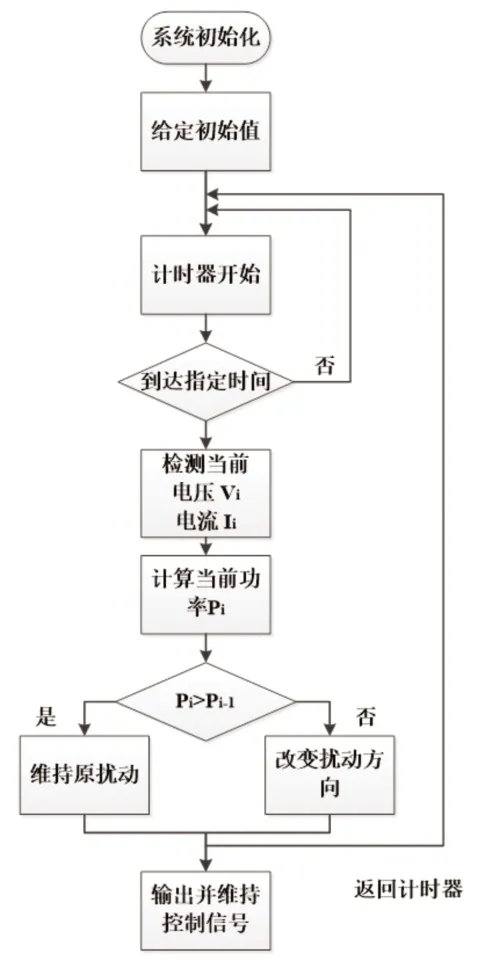
圖7 最大功率點跟蹤算法流程
第一步:系統初始化,外設初始化。
第二步:給定所需計算變量(電壓、電流和功率)的初始值;給定擾動時長、擾動步長、S3R 基礎參考初始值。
第三步:時間管理器通用計時器開始計時,達到指定時間時啟動A/D。
第四步:A/D 采集電壓和電流信號,并轉換。
第五步:DSP 接收采集信號,并計算當前功率值。
第六步:當前功率值與上一次功率值比較,若前者大于后者則維持擾動方向不變,反之則改變擾動方向。
第七步:輸出疊加擾動后的參考給定值。
3 仿真驗證
3.1 太陽電池陣模型
太陽電池陣的數學模型參考式為:

式中:IL為光伏電池中經由光照射后所產生的電流;Rs和Rsh分別為光伏電池內部等效的并聯電阻和串聯電阻;I為光伏電池的輸出電流,A;U為光伏電池的輸出電壓,V;q為一個電子所含的電荷量,取值1.6×10-19C;K為波爾茲曼常數,取值1.38×10-23J/K;T為太陽電池表面溫度,K;A為光伏電池的理想因數(n=1.5);Id為太陽電池的逆向飽和電流[5]。
可建立太陽電池陣仿真模型取代普通直流源作為S3MPR供電電源,工程上一般取光照強度Sref=1 000 W/m2,溫度Tref=298.15 K (25 ℃)為標準條件。標準條件下太陽電池技術參數一般由生產商給出,如標準條件下的短路電流Iscref、開路電壓Uocref、最大功率點電流Imref和最大功率點電壓Umref,非標準條件下的技術參數可由式(3)~式(6)的數學模型參考式得出。
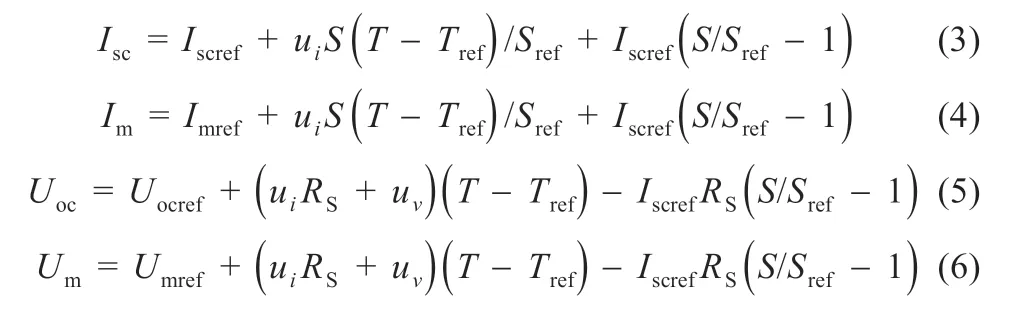
式中:S為實際光照強度;T為實際溫度;Isc為實際條件下太陽電池短路電流;Im為實際條件下太陽電池最大功率點電流;Uoc為實際條件下太陽電池開路電壓;Um為實際條件下太陽電池最大功率點電壓;ui為太陽電池電流溫度系數;uV為太陽電池電壓溫度系數。
由上述表達式可得到與給定光照溫度相對應的太陽電池陣輸出特性曲線。
3.2 S3R 拓撲結構
S3R 將太陽電池陣分成許多太陽電池單元,每個太陽電池單元都相當于恒流源(Iss),每個太陽電池單元都對應著一個滯環比較器。這些滯環比較器根據母線的主誤差放大器(MEA)決定向母線供電的太陽電池單元的數量,即供電電流的大小。主誤差放大器MEA 將反饋的MPP 母線電壓信號進行衰減,與參考給定Vref_bus比較,經PI 調節后輸出誤差信號給后級的滯環比較器來控制母線電壓[6]。
4 仿真結果
要求最終輸出電壓為126~160 V,單體模塊輸出功率500 W,總輸出功率1 kW。不同條件下太陽電池單元的最大功率點見表2。
設置如表2 所示的光照、溫度和時間條件,MPPT 控制器給定的控制信號如圖8 所示,對應時間點上,由于太陽電池輸入的光照和溫度發生突變,S3R 的參考給定MPPT 控制信號不再固定,而是相應隨著最大功率點移動的方向而移動。S3R 母線電壓也不再穩定于某一值而是隨著擾動信號改變,最終穩定在最大功率點電壓處。
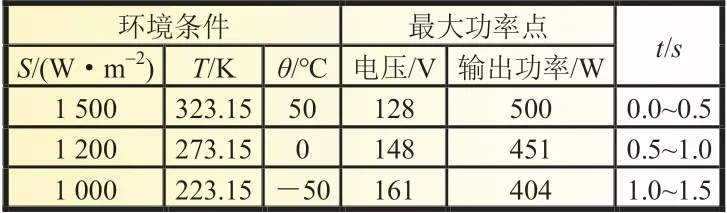
表2 不同條件下太陽電池單元最大功率點
對應的時間點光照溫度條件下的最大功率點電壓為128、148 和161 V,可得S3MPR 在對應時間點光照溫度條件下的母線電壓,平均值分別為127.5、147.5 和162.5 V,基本相符,最大誤差為0.93%,表明最大功率算法可以快速、精確地將母線電壓調整在最大功率點電壓,如圖8 所示。
由圖8 可知對應時間點的最大輸出功率為500、451 和404 W,不同時間點光照溫度條件下,最底層太陽電池單元輸出功率的平均值分別為500、452 和400 W,基本相符,最大誤差為1%,基本滿足要求,說明所采用的最大功率跟蹤算法和S3MPR 拓撲電路正確。
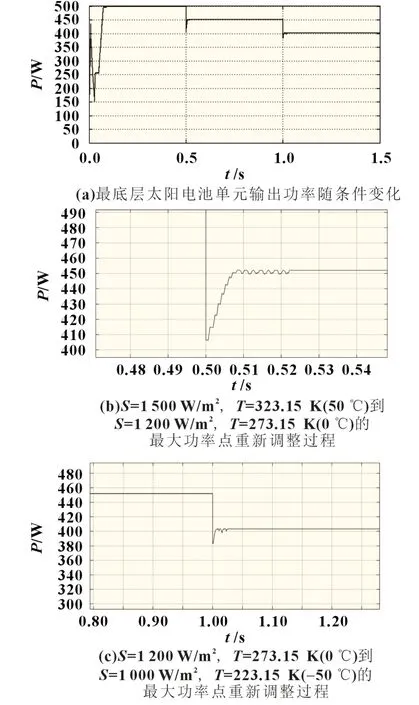
圖8 單體最大輸出功率
圖9 所示為S3MPR 總輸出功率,由于外界條件變化較大較迅速,在對應時間點處的功率波動非常大,在這種較為嚴苛的條件下,S3MPR 仍能夠重新找回最大功率點,證明S3MPR 具有一定的可靠性與穩定性。
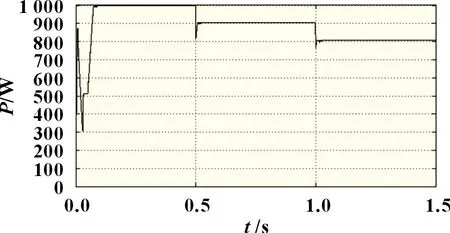
圖9 S3MPR 總輸出功率
5 結束語
本文設計了S3MPR 控制系統結構,并基于Matlab/Simulink 仿真環境,建立了太陽電池陣仿真模型、S3R 母線調壓仿真模型,并將它們與采用擾動觀察法的最大功率跟蹤函數結合,建立了S3MPR 仿真模型。仿真驗證了所用最大功率算法的可靠性與S3MPR 電路的正確性,為后續S3MPR 拓撲的應用提供了參考。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06