一種抑制后續換相失敗的變斜率電流偏差控制方法
2023-02-24 06:21:28晁武杰鄧超平黃均緯李元琦王渝紅陳立維
電力建設 2023年1期
晁武杰,鄧超平,黃均緯,李元琦,王渝紅,陳立維
(1.國網福建省電力有限公司電力科學研究院,福州市 350007;2.四川大學電氣工程學院,成都市 610065;3.福建省智能電網保護與運行控制重點實驗室,福州市 350007)
0 引 言
高壓直流輸電具有輸電容量大、輸電距離遠以及線路損耗小等優點,是解決新能源外送、提高新能源利用率的重要措施[1-2]。傳 統 的 電 網 換 相 高 壓 直 流 輸 電 (line commutated converter high voltage direct current,LCC-HVDC)技術在我國高壓直流輸電工程中應用廣泛,LCC-HVDC采用不具備自關斷能力的晶閘管作為換流元件,當受端交流系統發生故障時易發生換相失敗,換相失敗可能造成輸送功率瞬時驟降以及直流閉鎖和損壞設備等后果,嚴重地威脅著交直流系統的安全穩定運行[3-4]。后續換相失敗作為單次換相失敗的繼發性故障會給交直流系統帶來多次沖擊,引發更加惡劣的后果,因此,研究抑制后續換相失敗的方法具有重要的理論和工程意義[5-6]。
目前,國內外學者在LCC-HVDC后續換相失敗方面進行了部分研究并取得了一些成果。文獻[7]從逆變側控制器交互的角度詳細分析了后續換相失敗的產生機理,分析指出逆變側由定電流控制切換為定關斷角控制后,電流偏差控制(current error control,CEC)輸出的快速降低會導致關斷角不受控制,進而可能引發后續換相失敗。文獻[8]詳細分析了受端交流系統不對稱故障情況下后續換相失敗的產生機理,分析表明不對稱故障后實際超前觸發角發生的周期性波動,可能造成直流系統在恢復階段發生后續換相失敗。文獻[9]基于換相電壓時間積分和面積分析了后續換相失敗的產生機理,指出了導致后續換相失敗的直接和間接因素,并進一步提出了后續換相失敗風險指標來定量評估系統后續換相失敗風險。在后續換相失敗的抑制措施研究方面,文獻[10]通過虛擬電阻將直流電流的動態特性引入低壓限流控制器(voltage dependent current order limiter,VDCOL) ,降低了LCC-HVDC輸電系統后續換相失敗的風險,但虛擬電阻的引入會使系統恢復速度減慢。文獻[11]指出VDCOL輸出電流指令的劇烈波動可能引發后續換相失敗,提出了一種虛擬電容控制方法,有效地改善了故障后 VDCOL 輸出電流指令的劇烈波動情況,降低了發生后續換相失敗的風險。文獻[12]對VDCOL的控制方案進行改進,采用模糊控制對直流電流進行調節進而抑制后續換相失敗的發生。文獻[13]探究了儲能有功出力影響交直流混聯電網換相條件的作用機理,并從儲能有功出力時間與出力幅值的角度出發提出了抑制后續換相失敗的儲能有功出力協調控制策略。文獻[14]提出一種可根據直流電流和換相電壓的動態變化來調節直流電流指令的基于虛擬換相面積缺乏量的控制策略,有效降低了發生后續換相失敗的概率。文獻[15]針對同步參考坐標系鎖相環動態響應速度緩慢的問題,提出了一種改進鎖相環技術來提高觸發相位控制的精度,有效減少了后續換相失敗的發生。
在LCC-HVDC系統中,整流側的定最小觸發角控制與逆變側的定關斷角控制特性曲線斜率很接近,為避免系統在調節過程中定最小觸發角控制與定關斷角控制特性曲線相交導致控制系統不穩定,在逆變側定關斷角控制和定電流控制之間的切換處配置有一個正斜率的CEC[1]。目前對于CEC的研究相對較少,文獻[16]指出在CEC作用階段發生換相失敗的概率較大,并提出了一種關斷角動態補償的連續換相失敗抑制方法。文獻[17]提出了一種非線性動態CEC方法,提高了關斷角增量對電流偏差的靈敏度,增大實際關斷角裕度,降低了后續換相失敗發生的概率。
基于上述研究現狀,本文結合CEC的作用機理,提出一種變斜率CEC方案。該方案可根據故障嚴重程度調整CEC斜坡函數的斜率,增加關斷角增量對電流偏差的靈敏度,使輸入相同電流偏差時能輸出更大的關斷角增量,即增大關斷角的換相裕度,從而有效抑制后續換相失敗的發生。進一步對比不同斜率的CEC對直流系統運行特性的影響。最后在PSCAD/EMTDC仿真軟件中基于CIGRE HVDC標準測試系統進行仿真驗證,以驗證理論分析的正確性。
1 系統基本控制原理
CIGRE HVDC標準測試系統控制結構如圖1所示,圖1中:Idre為整流側直流電流;Udin、Idin和γdin分別為逆變側直流電壓、直流電流和關斷角;Idord和Iord分別為主控制極和實際輸出的直流電流指令值;γord為逆變側關斷角的指令值;βCC和βCEA分別為逆變側定電流控制和定關斷角控制輸出量;αre和αin分別為整流側和逆變側觸發角指令值。
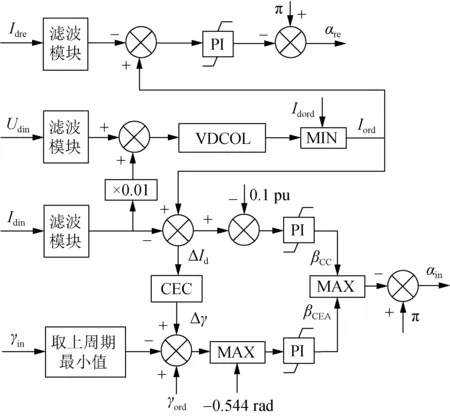
圖1 CIGRE HVDC標準測試系統控制結構Fig.1 Control structure of CIGRE HVDC standard test system
整流側配置有定電流(constant current,CC)控制和恒定觸發角(constant firing angle,CIA)控制;逆變側配置有定熄弧角(constant extinction angle,CEA)控制、CC控制、CEC以及VDCOL。正常運行時,整流側采用定電流控制,逆變側采用定關斷角控制。
由于整流側和逆變側均配備定電流控制,為確保在由測量誤差或其他原因引起誤差的情況下兩條定電流曲線不會相交,通常在二者間設置10%的裕度。當直流電流在0.9~1 pu之間時,逆變側控制將從CEA轉至CC,整流側控制將從CC轉至CIA。由于CEA和CIA的特性曲線斜率十分接近,所以兩條特性曲線的相交點在系統的動態變化中可能不唯一。在這個區域內,交流電壓的微小變化也會引起直流電流的大幅度改變,且會在控制方式和抽頭的切換間產生大的擺動[1]。為避免此問題,通常在逆變器的CEA和CC特性曲線間引入一個正斜率的CEC。全套控制系統的靜態伏安特性曲線如圖2所示。
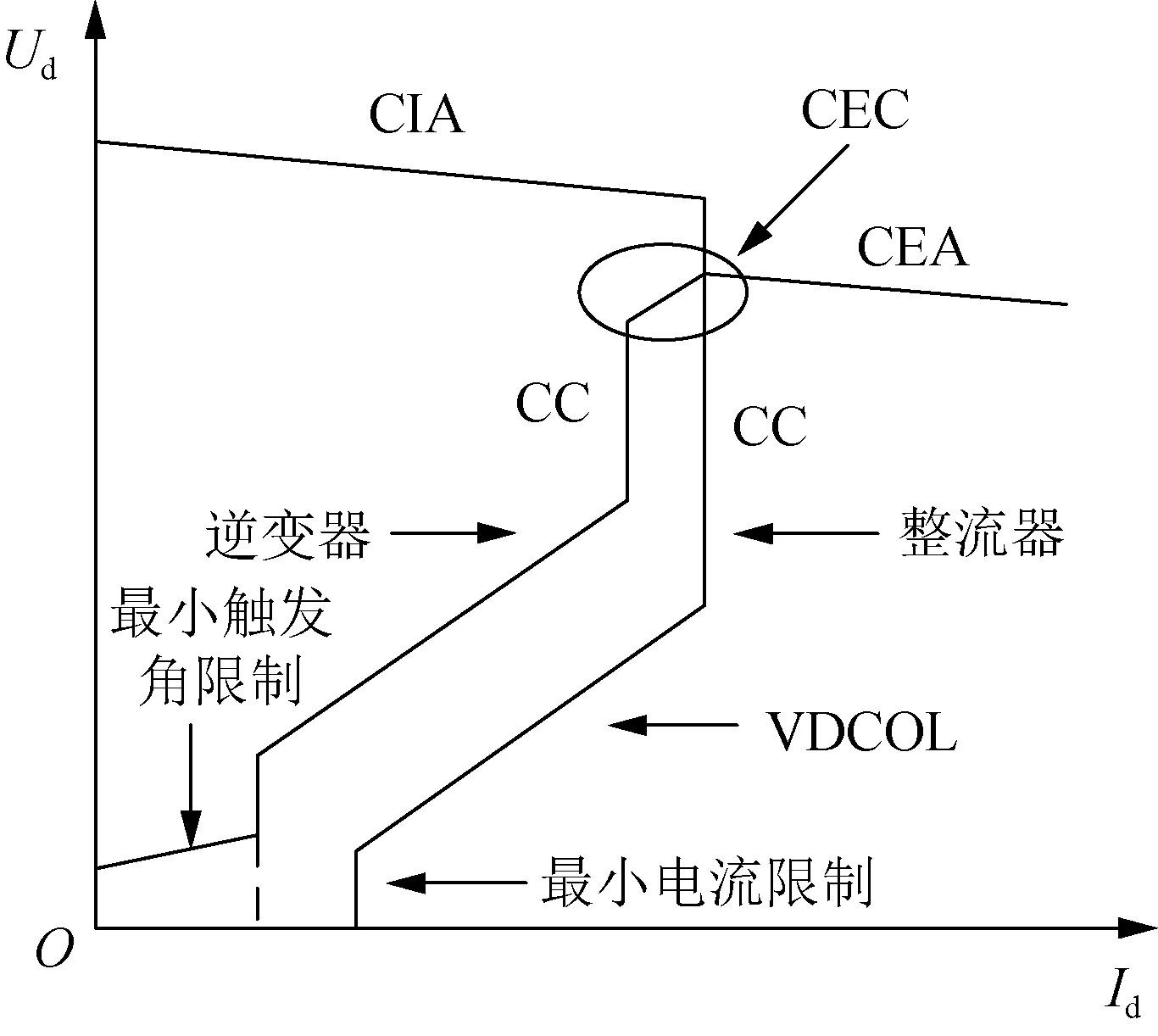
圖2 全套控制系統的靜態伏安特性Fig.2 Static volt-ampere characteristics of the complete control system
2 電流偏差控制及其改進策略
2.1 電流偏差控制分析
當整流側直流電流指令值大于逆變側實際直流電流值時,CEC將輸出關斷角補償量Δγ到定關斷角控制中,增大關斷角的整定值,快速調節逆變側關斷角。CIGRE HVDC標準測試系統CEC的靜態特性曲線為斜坡函數,如圖3所示,其中電流偏差ΔId與關斷角增量Δγ之間的關系如式(1)所示。

圖3 電流偏差控制靜態特性曲線Fig.3 Static characteristic curve of current deviation control
(1)
式中:ΔId為整流側直流電流指令值與逆變側直流電流實際值的差值;Δγ為輸出的關斷角增量值;ΔIHN為
輸入直流電流偏差飽和值;ΔγMAXN為輸出關斷角增量最大值;K是斜坡函數的斜率。CIGRE HVDC標準測試系統中ΔIHN取為0.1 pu,ΔγMAXN取為 0.279 3 rad,此時斜率K為:
(2)
從以上對CEC特性曲線分析可知,當電流偏差ΔId達到飽和值時,CEC輸出的關斷角增量將達到最大值,不能根據故障嚴重程度增大輸出關斷角增量的值。此外,CEC斜坡函數的斜率K由輸出關斷角增量最大值和輸入直流電流偏差飽和值決定,當輸出關斷角增量最大值和輸入直流電流偏差飽和值固定時斜率K也固定,在不同嚴重程度故障下輸出關斷角增量對電流偏差的靈敏度一致,此時靈敏度不能根據故障嚴重程度進行自適應調節。逆變側關斷角不足是發生換相失敗的根本原因,逆變側關斷角整定值恒定時,CEC輸出的關斷角增量若能根據故障嚴重程度自適應地快速增大,進而增大實際的換相裕度,則可能減少發生后續換相失敗的風險。
2.2 變斜率電流偏差控制
基于以上分析,本文對CIGRE HVDC標準測試系統CEC特性進行改進,使CEC能按照故障嚴重程度調節斜坡函數的斜率和輸出關斷角增量,當直流輸電系統發生首次換相失敗后系統恢復過程中,增大逆變器的關斷角和換相裕度,進而減少發生后續換相失敗的風險。
仿照換相失敗預測控制的故障檢測功能對不對稱故障和對稱故障進行檢測,其中不對稱故障檢測是通過比較三相電壓瞬時值相加得到的三相零序電壓是否大于不對稱故障檢測的閾值來判斷是否發生不對稱故障,計算公式為[1]:
U0=Ua+Ub+Uc
(3)
式中:Ua、Ub、Uc為換流母線三相交流電壓瞬時值;U0為三相交流電壓瞬時值的零序電壓。
對稱故障檢測是通過abc-αβ坐標變換將三相電壓瞬時值變換到兩相靜止坐標系中,并根據兩相靜止坐標系的均方根值是否大于對稱故障檢測的閾值來判斷是否發生對稱故障,計算公式為[1]:
(4)
式中:Uα、Uβ分別為兩相靜止坐標系下α、β相電壓值;Uαβ為Uα和Uβ的均方根值。
當交流系統故障嚴重程度達到任一故障檢測的閾值時,故障檢測器將輸出不對稱故障檢測與對稱故障檢測的較大者UCF,UCF的大小能較好地描述故障嚴重程度,計算公式為:
UCF=max(U0,Uαβ)
(5)
CEC斜坡函數的斜率由輸出關斷角增量最大值和輸入直流電流偏差飽和值決定,將故障檢測器輸出的UCF輸入到CEC中,對CEC的輸入直流電流偏差飽和值或輸出關斷角增量最大值進行改進,使CEC輸出的關斷角增量能根據故障嚴重程度自適應地做出調整。自適應CEC控制結構如圖4所示,圖中ABZ_LEVEL是對稱故障檢測器的閾值,設置為0.15;DIFF_LEVEL是不對稱故障檢測器的閾值,設置為0.14[1]。
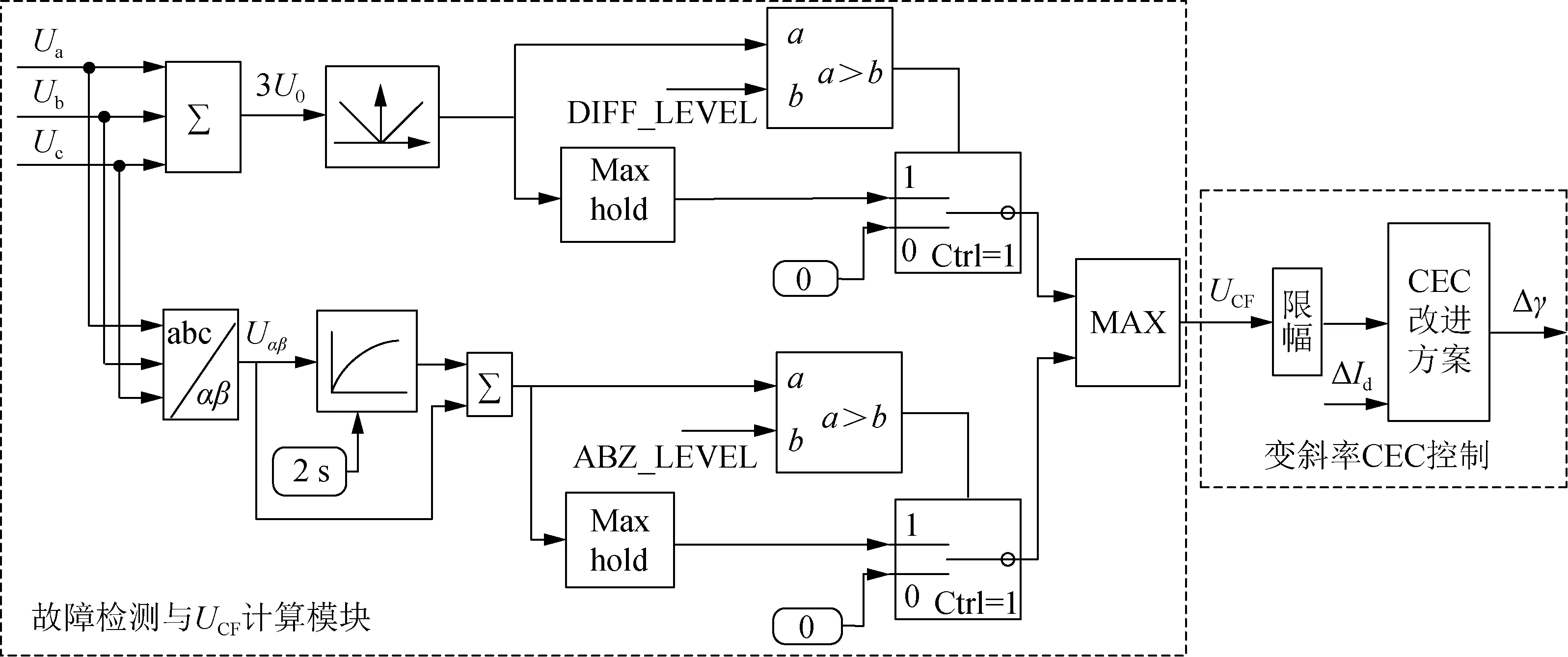
圖4 變斜率電流偏差控制結構Fig.4 Structure diagram of variable-slope current deviation control
對CEC的三種改進方式如下:
1)方式一對CEC改進后的特性曲線如圖5所示,固定CEC的輸入量直流電流偏差飽和值不變,運用上述故障檢測器輸出的UCF改變CEC輸出的關斷角增量最大值ΔγMAX,如式(6)所示。
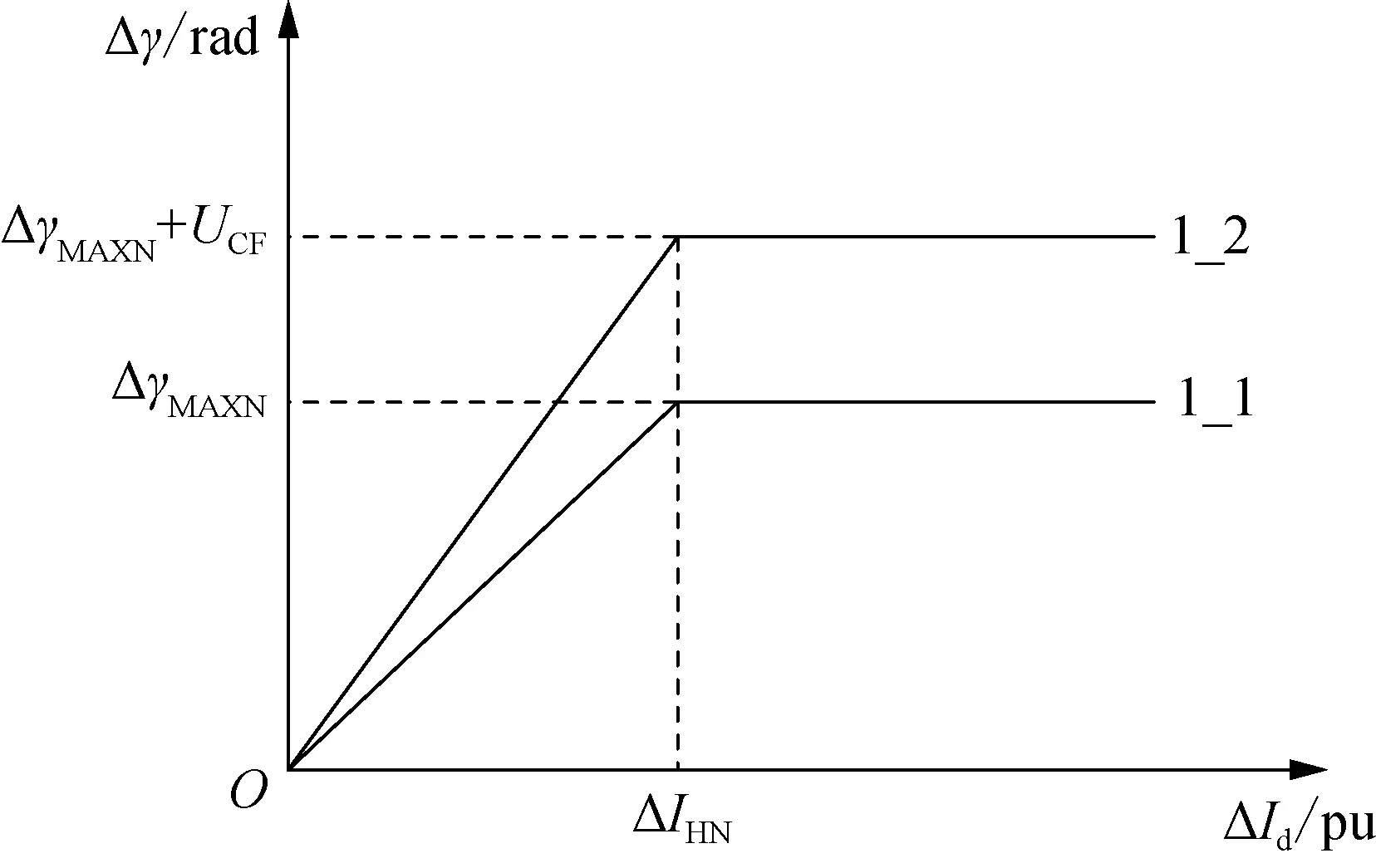
圖5 方式一CEC特性曲線Fig.5 CEC characteristic curve of Scheme 1
(6)
方式一CEC斜坡函數的斜率K1能根據故障嚴重程度做出調整,如式(7)所示:
(7)
此時CEC在不同故障嚴重程度下對輸入的電流偏差靈敏度不同,使CEC輸出的關斷角增量能根據故障嚴重程度自適應地變化。改進后的方式一CEC特性的表達式如式(8)所示。為避免UCF出現極端情況惡化系統運行,UCF限幅為0~0.2 pu。
(8)
2)方式二對CEC改進后的特性曲線如圖6所示,固定CEC的關斷角增量最大值不變,運用上述故障檢測器輸出的UCF改變CEC的輸入量直流電流偏差飽和值ΔIH,如式(9)所示。
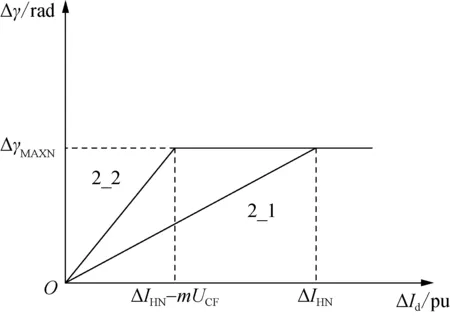
圖6 方式二CEC特性曲線Fig.6 CEC characteristic curve of Scheme 2
ΔIH=ΔIHN-mUCF
(9)
式中:參數m選為0.5。
方式二CEC斜坡函數的斜率K2能根據故障嚴重
程度做出調整,如式(10)所示:
(10)
此時CEC在不同故障嚴重程度下對輸入的電流偏差的靈敏度不同,使CEC輸出的關斷角增量能根據故障嚴重程度自適應地變化。改進后的方式二CEC控制特性的表達式如式(11)所示。為避免UCF出現極端情況惡化系統運行,UCF限幅為0~0.18 pu[18]。
(11)
3)方式三對CEC改進后的特性曲線如圖7所示,運用上述故障檢測器輸出的UCF同時改變CEC的輸出關斷角增量最大值ΔγMAX和輸入量直流電流偏差飽和值ΔIH。此時,方式三CEC斜坡函數的斜率K3能根據故障嚴重程度做出調整,如式(12)所示。
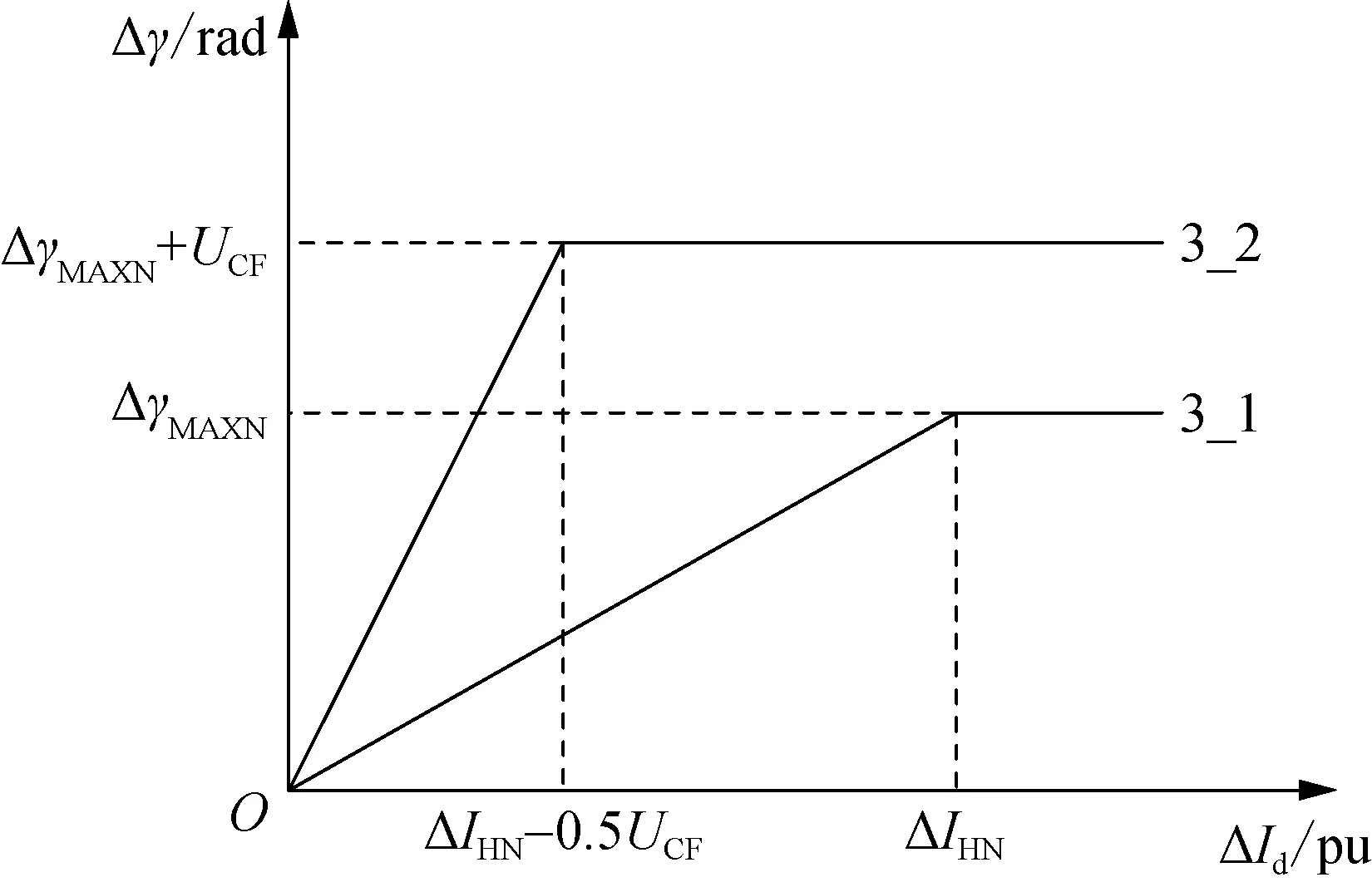
圖7 方式三CEC特性曲線Fig.7 CEC characteristic curve of Scheme 3
(12)
因此,修改后的CEC在不同故障嚴重程度下對輸入的電流偏差靈敏度不同,使CEC輸出的關斷角增量能根據故障嚴重程度動態地變化。改進后的CEC控制特性的表達式如式(13)所示。為避免UCF出現極端情況惡化系統運行,UCF限幅為0~0.18 pu。
(13)
根據式(13)和圖7可知,系統正常運行時,故障檢測器輸出的UCF為0,此時,CEC特性為CIGRE HVDC標準測試系統中CEC特性,如曲線3_1。當逆變側受端交流系統發生故障時,故障檢測器輸出的UCF不為0,CEC特性為曲線3_2,關斷角增量最大值由ΔγMAX變為ΔγMAXN+UCF,直流電流偏差飽和值由ΔIH變為ΔIHN-0.5UCF,且故障越嚴重關斷角增量最大值越大,直流電流偏差飽和值越小,CEC特性曲線的斜率越大,對電流偏差越靈敏,輸入相同的電流偏差能輸出更大的關斷角增量。當故障結束后,系統恢復正常時,故障檢測器輸出的UCF為0,CEC的控制特性變回曲線3_1。
2.3 CEC斜率對控制效果的影響
從以上分析可以看出,三種改進后CEC斜坡函數的斜率大于CIGRE HVDC標準測試系統中CEC斜坡函數的斜率且均能根據故障嚴重程度做出調整,從而使CEC輸出的關斷角增量能隨故障嚴重程度動態地變化,但是CEC斜坡函數的斜率不同,對電流偏差的靈敏度不同,在輸入電流偏差相同的情況下,輸出的關斷角增量會有差異,從而對直流輸電系統運行特性的影響也不同。為得到CEC斜率對系統控制效果的影響,分析了不同斜率的CEC對系統輸出關斷角增量、有功功率和無功功率的影響。僅更改橫坐標CEC斜率和僅更改縱坐標CEC斜率作差為:
(14)
本文所提變斜率CEC方式的斜率與僅更改橫坐標CEC斜率作差為:
(15)
因此,在輸入電流偏差的一定范圍內,輸入相同的電流偏差時,本文所提CEC策略輸出的關斷角增量最大,僅更改橫坐標的CEC策略居中,僅更改縱坐標的CEC策略在三者中最小。另一方面,根據換流器等效電路和穩態模型,直流輸電系統中部分電氣量具有如下關系[1]:
Pac=Pd=UdId
(16)
Qac=Pactanφ
(17)
(18)
式中:Pac為交流側吸收的有功功率;Pd為交流側輸送的有功功率;Qac為交流系統消耗的無功功率;φ為交流系統功率因數角;γ為換流器關斷角;β為換流器超前觸發角。
由式(16)—(18)可知,直流輸電系統中γ越大,φ會越低,換流母線處無功需求會越大,直流傳輸功率會越低,不利于直流輸電系統的經濟運行。因此,在輸入電流偏差的一定范圍內,CEC斜坡函數的斜率越大,換相裕度增加越大,越有利于抑制后續換相失敗,但不利于故障后系統傳輸功率的恢復,直流輸電系統輸送功率會越低。
3 仿真驗證
3.1 仿真模型
為驗證本文所提變斜率CEC方案抑制后續換相失敗的有效性,在PSCAD/EMTDC仿真軟件中基于CIGRE HVDC標準測試系統實現本文所提方案,并進行仿真驗證。CIGRE HVDC標準測試系統額定直流輸送功率為1 000 MW,額定電壓為500 kV,額定電流為2 kA,模型的詳細拓撲結構和參數見文獻[10]。
3.2 仿真分析與驗證
為驗證本文所提變斜率CEC方案的有效性,在2種工況下分別采用以下5種控制方案進行仿真,記錄相關電氣量的變化情況,對比分析5種控制方案抑制后續換相失敗的有效性。
方案一:CIGRE HVDC標準測試系統控制策略;
方案二:文獻[18]所提控制策略。
方案三:將方案一中CEC替換成僅更改橫坐標的變斜率CEC。
方案四:將方案一中CEC替換成僅更改縱坐標的變斜率CEC。
方案五:將方案一中CEC替換成本文所提變斜率CEC。
工況1:在逆變側換流母線處設置接地電感Lf為0.6 H的三相接地故障,故障開始時間為1 s,持續0.2 s,分別采用以上5種控制方案進行仿真,相關電氣量的變化情況如圖8所示。
由圖8可知,在上述工況下,采用方案一時,直流系統連續發生兩次換相失敗,輸送功率、直流電流以及換流母線電壓具有兩次較大的波動,對系統產生兩次較大的沖擊。采用方案二、方案三、方案四和方案五時,由于故障后電壓迅速降低且跌落較嚴重,幾種改進后的CEC均來不及反應,不能抑制首次換相失敗的發生。首次換相失敗后,四種改進后的CEC動作,抑制
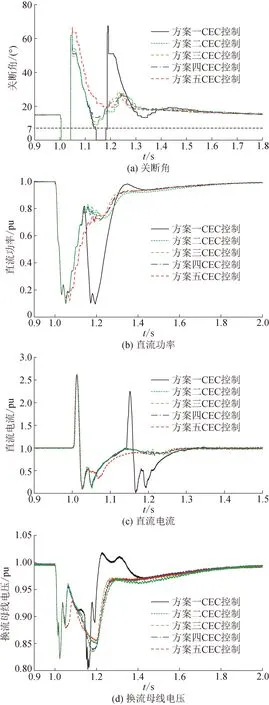
圖8 三相故障Lf=0.6 H時系統的運行特性Fig.8 System operation performance under three-phase fault with Lf= 0.6 H
了直流系統發生后續換相失敗,輸送功率、直流電流以及換流母線電壓只有一次較大的波動,且隨著故障的清除均能較快地恢復穩定。在首次換相失敗后的幾個周期里,四種改進方案均具有足夠的換相裕度,其中換相裕度最大的是方案五,最小的是方案二。另一方面,采用方案二時系統輸送功率恢復速度最快,方案五系統輸送功率恢復速度最慢,驗證了上文理論分析的正確性。
工況2:在逆變側換流母線處設置接地電感Lf為0.4 H的單相接地故障,故障開始時間為1 s,持續0.2 s,分別采用以上5種控制方案進行仿真,相關電氣量的變化情況如圖9所示。
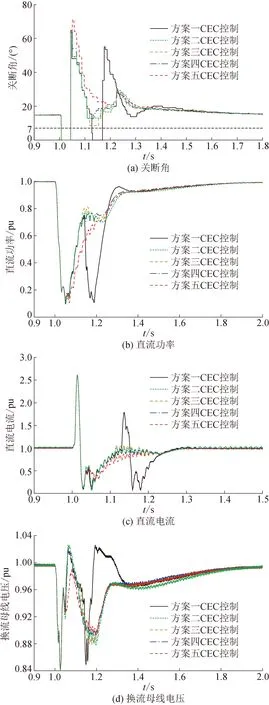
圖9 單相故障Lf=0.4 H時系統的運行特性Fig.9 System operation performance under single-phase fault with Lf= 0.4 H
由圖9可知,采用方案一時直流系統連續發生兩次換相失敗;采用方案二、方案三、方案四和方案五時均能有效抑制后續換相失敗的發生,方案五的換相裕度最大但輸送功率恢復速度最慢,方案二的換相裕度最小但輸送功率恢復速度最快,故障清除后輸送功率、直流電流以及換流母線電壓均能較快地恢復穩定,驗證了上文理論分析的正確性。
為更加全面地驗證本文所提變斜率CEC控制的有效性,在不同故障類型和故障水平下進行大量仿真測試,并記錄以上5種控制方案下換相失敗次數。故障水平的定義為[17]:
(19)
式中:UL為換流母線電壓;ω為角頻率;PdN為直流系統的額定傳輸功率。故障水平FL越大,表示故障越嚴重。
故障水平設置為5%~50%,以5%為步長進行變化,在逆變側換流母線處設置單相和三相接地故障,分別采用以上5種控制方案進行仿真,換相失敗次數的統計如表1所示。
由表1可知,當故障水平較小時,采用方案一不發生換相失敗,采用方案二、方案三、方案四和方案五也不會發生換相失敗。當故障水平較大時,采用方案二、方案三、方案四和方案五均能有效地抑制直流系統發生后續換相失敗,且方案四和方案五的效果優于方案二和方案三。在50%的故障水平范圍內,方案四和方案五的連續換相失敗次數相同,但從圖8和圖9中可以看出方案五的關斷角最小值最大,直流電流和直流功率的波動更小,換流母線電壓的跌落程度也更小。雖然方案五的恢復時間較慢,但是其可以抵御更加嚴重的故障,在預防換相失敗方面的效果最優。因此,采用本文所提變斜率CEC控制方案能有效抑制直流系統發生后續換相失敗,提高系統對后續換相失敗的免疫能力。

表1 五種控制方案下直流系統連續換相失敗次數Table 1 Number of continuous commutation failures in HVDC under four control methods
4 結 論
1)本文對CIGRE HVDC標準測試系統中CEC進行改進,使其輸出的關斷角增量能根據故障嚴重程度自適應地做出調整,仿真結果驗證了改進方法的有效性。
2)CEC斜坡函數的斜率越大,對輸入電流偏差越敏感,換相裕度增加越大,越有利于抑制后續換相失敗,但不利于故障后系統傳輸功率的恢復,直流輸電系統輸送功率會越低。
3)所提的變斜率CEC方案均能有效地減少發生后續換相失敗的風險,改善系統在故障情況下的運行特性,提高系統對后續換相失敗的免疫能力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
