西門子Definition AS CT故障維修案例分析
2023-03-05 09:13:04王存勇吳曉亮張明臣
中國醫療設備 2023年2期
王存勇,吳曉亮,張明臣
聊城市人民醫院 設備科,聊城 山東 252000
引言
西門子Definition AS 64排CT是高端螺旋CT之一,在臨床影像診斷中發揮了巨大的作用,廣泛應用于各大醫院的放射科和體檢中心,市場占有率較高[1],目前是我院CT檢查的主力機型之一。隨著檢查量的日益增多、使用年限增長,該設備的故障率隨之增加,尤其是硬件故障時常發生,例如,球管的燈絲老化、高壓部件打火故障、滑環故障、探測器模塊損壞或老化等故障較為常見,以上故障會導致圖像偽影問題[2]。在維修過程中,臨床工程技術人員對一些簡單、常見故障的解決方法相對成熟,但對一些原因較為復雜的故障,往往缺乏思路,對相關報錯代碼的解讀不準確,故障原因排查不到位[3],從而導致故障解決的不及時、不徹底,甚至將故障擴大化等。基于此,本文以檢查床、前滑環及重建計算機故障為例,詳細介紹了西門子CT復雜故障的解決思路和方法,以供同行參考。
1 設備基本信息及工作原理
我院西門子Definition AS 64排CT是一款風冷型機型,主要由機架、檢查床、主控計算機、重建計算機及配電柜組成[4],機架內部又分為動態旋轉部分和靜態部分,其中動態旋轉部分主要部件包括高壓發生器、球管、準直器、探測器系統及動態控制單元等,其工作流程如下:配電柜輸出電壓經過經高壓發生器處理,為球管提供直流高壓電,球管發出X射線經過人體組織結構,由探測器檢測、接收并將透過人體的不可見的X射線轉換成模擬電信號,在計算機的控制下進行模數轉換,形成原始的數字信號并傳送至重建計算機進行數據的重建,最終在顯示器上顯示出圖像以供臨床診斷。其成像過程可簡化為:球管→X射線→準直器→人/物—數據采集系統(Data Acquisition System,DAS)→天線(Front Slip)→光纖→重建計算機→主控計算機。所有部件(包括檢查床)采用控制器局域網總線(Controller Area Network,CAN)通訊,串聯在一條線路上,各部件啟動后的狀態信號統一反發送至靜態部分主控單元(亦為CAN通訊總控制單元)并做出反饋(圖1)。該機型具有掃描速度快(0.33 s/圈)、圖像質量高(Z軸分辨率為0.33 mm)、輻射劑量低、檢查范圍廣(頭、胸、腹、下肢等部位)等優點[5]。目前使用率較高,故障率也隨之增高,作為臨床工程技術人員,應當熟練掌握機器的基本組成結構、工作原理,從而更好地保障設備的穩定運行。
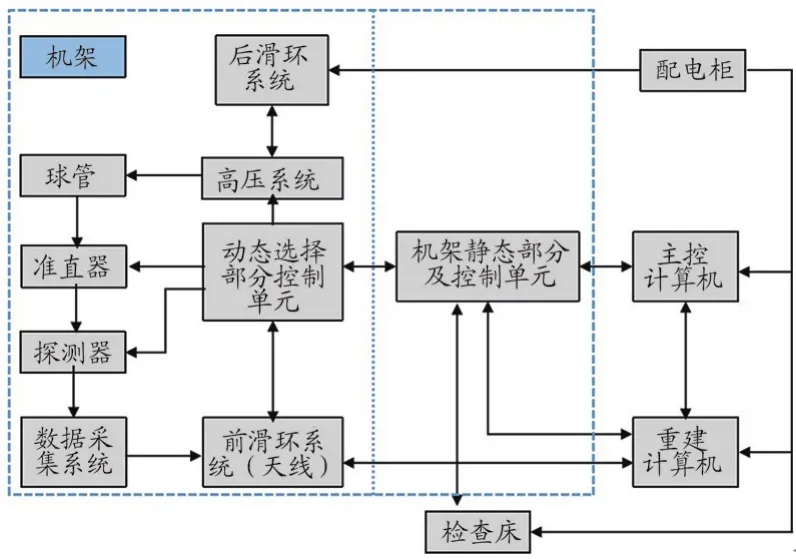
圖1 系統結構圖
2 故障一
2.1 故障現象
機架無法正常開啟,需多次啟動才能正常開啟。
2.2 故障分析及解決方案
根據故障現象進行排查:① 應急處理:將機器徹底斷電關機,等待5 min后再次開機,故障現象依舊;② 進入Localservice(本地維修模式)查看報錯:報“CT_PHS_140、CT_GSV 216”錯(圖2),初步判斷為檢查床通訊故障引起;③ 測量CAN通訊總控制單元及連接線:因檢查床通訊異常故檢查總控制單元,其狀態也異常,通過屏蔽將檢查床旁路后再檢查總控制單元,其狀態恢復正常。進一步檢查并測量檢查床至總控制單元的CAN通訊線,無明顯斷裂損壞,測量通斷正常,測量阻值(為120 Ω)正常,且對地不短路,因此排除總控制單元及通訊線故障[6];④ 刷新Firmware:因此懷疑可能是檢查床控制板上的固件程序(Firmware)丟失導致檢查床狀態異常,于是進入Localservice手動刷新床控制板的Firmware可成功,報錯消失,但多次測試后,故障依舊,故排除Firmware丟失故障;⑤ 檢查床控制板及其供電:打開床圍簾檢查床控制板,板上狀態指示燈(亮綠色)正常,無報錯指示。查看電路圖(圖3)并測量其供電單元G701(一輸入為230 V AC,多路直流輸出檢查的開關電源,其中輸出為24 V DC,為床控制板、檢查床升降電機等供電),實測其輸入電壓為230.2 V,輸出電壓為23.9 V,略低于正常電壓值。檢查床上共有2個此類開關電源,另一個為G702(為檢查床水平運動電機供電),對比測量其輸入電壓為230.2 V,輸出電壓為24.1 V,于是將二者互換,經多次測試后報錯消失,故判斷該故障可能是床控制板的24 V供電不足引起的;⑥ 故障排除:為徹底解決故障,將G701換回,調節變阻器VR501(圖4)改變其輸出電壓,多次測試后發現當G701輸出電壓≥24 V時,報錯不再出現。但為防止電壓過高或過低導致其他部件故障,因此將G701輸出電壓調節為24.5 V,設備使用后未發現類似故障。
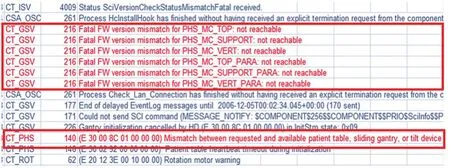
圖2 報錯代碼
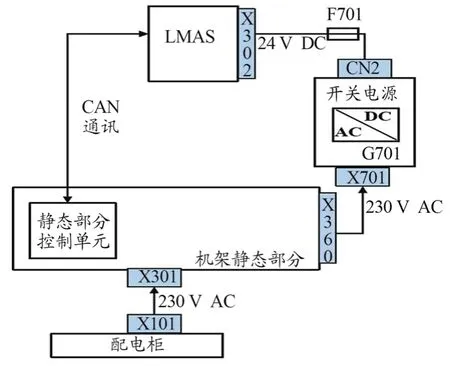
圖3 床控制板供電電路

圖4 輸出端CN2旁調節電壓的變阻器VR501
2.3 故障小結
檢查床故障是該款CT常發故障,報錯代碼多為“CT_PHS”相關報錯,但多為通訊故障,上述故障較為少見[7]。掌握檢查床的結構組成及工作原理后可通過自行維修解決,廠家的床控制板與電源模塊報價較為昂貴,通過自行維修可節省大量經費,極大地提高維修效率,保障設備的穩定運行。
3 故障二
3.1 故障現象
掃描時會偶發機架掉電,掃描突然中斷。
3.2 故障分析及解決方案
根據故障現象進行排查:① 分析故障現象:絕大多數部位的掃描可以進行,部分掃描不可進行,并發現機架掉電時的掃描模式機架轉速均較快。② 分析報錯:查看日志,報錯為“CT_MAS_128、CT_MAR_179”,指向Fastlink相關故障。在西門子CT機中,FastLink是各部件控制信號(Control Data)發送、傳輸、接收、反饋的鏈路,一旦Fastlink故障,機架掃描時會掉電,導致掃描突然中斷。③ 故障模擬:進入Localservice的Test Tools中,分別打開Fastlink Test、Rot/Static測試程序,在旋轉模式(Rotation Mode)下加載0.33 s或0.3 s(機架旋轉速度)轉速、不同位置的掃描模式,進行二者同步測試[8](圖5),測試過程中發現在所有不同位置機架都會掉電,且Fastlink測試失敗。再次嘗試在Static Mode(靜止模式)采取在不同位置掃描的方式,當機架在某個位置掃描時也掉電,且Fastlink 測試失敗,初步判斷故障為Fastlink鏈路上相關部件故障導致。④ 縮小故障范圍:查看電路圖,將此臺CT的Fastlink鏈路簡化為圖6可知,Fastlink可分為3部分:機架靜態部分之間的連接、機架旋轉部分之間和機架靜態部分與旋轉部分之間的連接,根據故障現象及故障代碼“CT_MAR_179”可知,故障可進一步縮小范圍至機架靜態部分與旋轉部分之間的連接。⑤ 路徑分析:由示意圖可知靜態部分與旋轉部分的控制信號由靜態部分主控制單元UMAS上多端口快速連接信號主控制(Multiport Fast-link Master Module,MFM)模塊經靜態部分發射模塊發射信號,通過天線被旋轉部分接收模塊接收,傳輸至旋轉部分主控制單元UMR上MFM模塊,此外UMR上MFM模塊發送給和接收其他旋轉部件控制信號,最終匯總反饋信號回傳UMAS上MFM模塊。回傳路徑為:UMR上MFM模塊經旋轉部分發射模塊發射信號,通過天線被靜態部分接收模塊接收,回傳至UMAS上MFM模塊從而進行相關指令的操作。因此逐一排查UMAS、各發射接收模塊、天線、UMR及之間的光纖、接口等。⑥ 排除UMAS、UMR故障:采用組合排除法,將UMAS、UMR 2個新配件分別換上及同時換上后故障依舊,因此排除UMAS、UMR故障。⑦ 排除接口故障:檢查鏈路上各部件的接口,無明顯異物、損壞、氧化或虛焊,同時用無水乙醇清潔光纖接口及光纖頭,接回后故障依舊,因此排除接口故障。⑧ 確定天線故障:檢查天線(前滑環系統),此臺CT的滑環系統分為2個部分:后滑環系統(Slipring System Rear)和前滑環系統(Slipring System Front),后滑環系統在機架后面,碳刷與其連接,分為高壓、低壓和通訊滑環3部分[9]。作用是靜態與旋轉部分CAN通訊的中間轉接點,將480 V、2 kV分別送至旋裝部件供電單元和高壓油箱,不在此次故障排查范圍[10]。前滑環系統分為控制信號和圖像數據信號天線2個部分,分別用于控制信號及圖像數據的傳送,此處故障排查控制信號天線部分。因此,查看并測量控制信號天線及阻值,其終端有4個結點(圖7),實質是4個按一定順序連接的電阻(圖8),電阻1、2、3、4對地阻值應為(39±0.5)Ω。對地實測阻值為39.0、39.1、38.9、42.0 Ω,電阻4對地阻值偏大,檢查發現對應的天線上有造影劑滴落,用無水乙醇將其擦拭干凈后對地實測阻值為38.8 Ω,恢復正常。為防止天線其他位置有類似情況,因此排查天線及其周圍,發現在正對機架約8點鐘方向有大片造影劑痕跡,疑似在機架旋轉過程中流至天線上。因此一并清除干凈裝回,反復進行測試,結果發現在Static Mode的不同位置多次掃描不報錯,故障消失。但在Rotation Mode下加載0.33 s或0.3 s轉速測試,故障依舊,因此設備仍存在其他故障。⑨ 故障排除:檢測靜態和旋轉部分的發射、接收模塊的固定、光纖接口、輸入電壓等,光纖接口和電壓[電壓實測值分別為24.2、23.9、24、23.8 V(正常值為24.0±0.5 V)]皆正常[11],發現靜態部分接收模塊存在松動跡象,位置疑似偏差。對比檢測其他3個模塊的固定,確定此模塊松動且位置有偏差。因模塊固定在天線上,根據無線傳輸原理,位置的偏差可能會導致信號傳送效果變差、響應不及時甚至中斷(此處的位置指模塊與天線表面的距離),因此位置需校正。校正需通過專用工具(黑色平板,平板的厚度即模塊與天線表面的最佳距離)進行,先將模塊拆除,校正工具固定在調整口,將模塊放在其上,固定距離與工具厚度一致后抽離工具即可。調整完畢后反復進行FastlinkTest和旋轉測試皆成功,故障解決,機器使用至今未發生類似故障[12]。
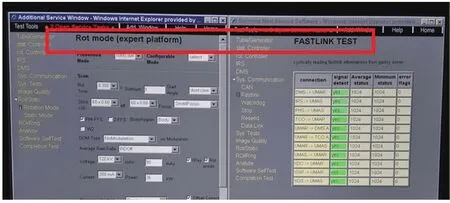
圖5 同步測試
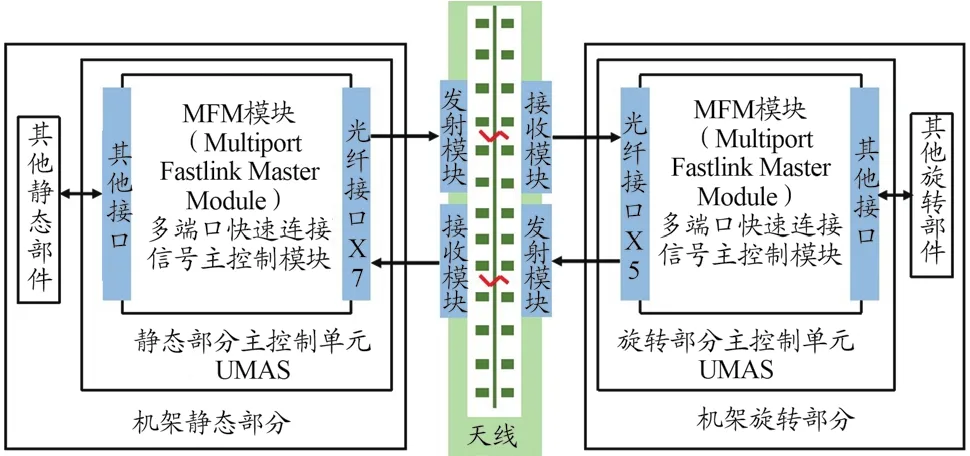
圖6 Fastlink鏈路示意圖
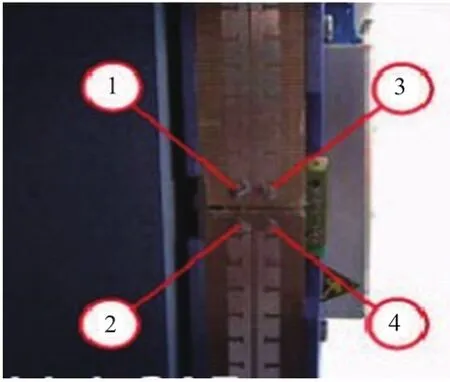
圖7 天線實物圖
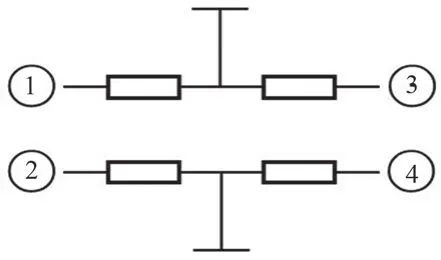
圖8 天線簡化圖
3.3 故障小結
滑環通常指后滑環,系統故障高發部位在后滑環上,例如,滑環打火、碳刷磨損嚴重、碳粉累積在滑環上導致的通訊異常等[13]。主流CT的滑環系統分為前、后2個部分,前滑環系統即天線部分的分析與研究往往容易被忽略,而上述故障就發生在天線上,較為罕見,故障判斷較為復雜,一般廠家可能會選擇更換整套系統,成本以百萬計,且耗時長。此故障中,模塊位置的偏差導致信號發射與接收出現錯誤,尤其是在機架高速旋轉過程中尤為明顯,維修難度巨大,故障原因不易找到,通過詳細的分析與排查并最終解決故障,節省經費近百萬元。
4 故障三
4.1 故障現象
掃描過程中,重建的圖像出現倒置,床板在上,掃描部位在下(圖9~10)。

圖9 胸部平掃圖像倒置
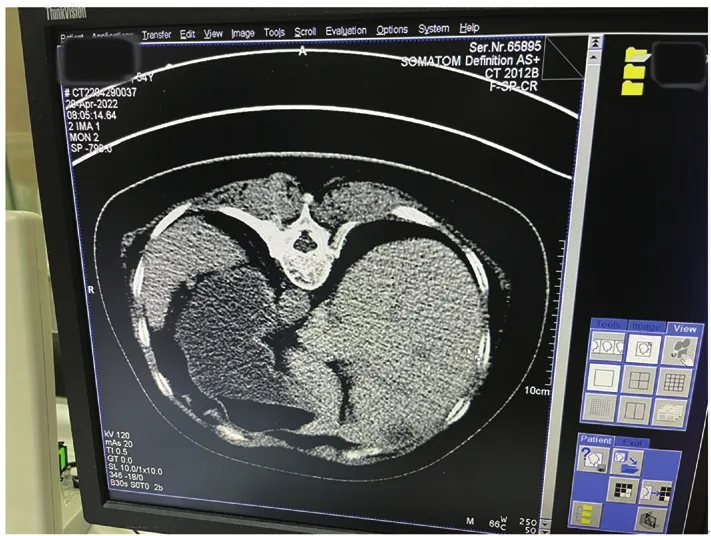
圖10 局部放大圖
4.2 故障分析及解決方案
根據故障現象進行排查: ① 應急處理:單獨重啟重建計算機,試掃水模故障依舊。②進入Localservice查看報錯:無有效報錯信息。根據圖像產生基本過程,逐一排查圖像數據鏈路上各部件:球管、準直器、DAS、天線、光纖、重建計算機、主控計算機等,其中DAS包括探測器、探測器背板及供電單元。③ 排除硬件故障:進入Localsrvice的各個界面分別檢查系統相關硬件,進入Report(使用報告)界面檢查球管及其高壓部件的實時使用報告(Tube Report),無打火(Arcing)記錄,高壓實時動作、燈絲電流、管電壓、射線劑量皆在正常范圍內,且機器能夠正常曝光,故排除球管及高壓故障。在COC-Test(準直器系統測試)界面中反復多次進行Collimator Test(準直器運動自檢),結果正常無報錯。打開機架前蓋,檢查探測器及背板上的信號及供電,輸入輸出電壓皆正常,且信號指示燈無異常,并在Channel Test(通道測試)界面,檢測46塊模塊共736個通道(此探測器為等寬探測器,每個模塊有16個通道),檢測其接收的信號值,皆在正常范圍內,排除DAS故障[14]。進入Test Tools界面檢查計算機上的各個硬件,測試正常,排除計算機故障。最后,檢查數據傳輸的所有光纖及其接頭,無明顯斷裂或折損,并用無水乙醇清潔各個接口。依照故障二中提到的原理及方法,測試天線終端4個結點的阻值,皆在正常值范圍內,排除天線故障。待硬件排查結束后,采用同樣的掃描模式和條件掃描水模,發現故障依舊,因此排除硬件故障。故將故障初步判斷為軟件故障或通訊故障[15]。④ 通訊故障排除:進入維修模式的Test Tools界面反復進行CAN通訊及Fast link測試,無報錯,故排除通訊故障。⑤ 查看圖像重建過程:調取之前的原始數據進行重建,分別選取不同的重建算法(主要是濾波反投影算法)及重建條件(分別選取0.5、1.0、5.0 mm等重建層厚),發現重建過程相較于之前速度異常緩慢,因此進入管理員模式清理重建原始數據庫,再次試掃水模后故障依舊。⑥ 重建計算機軟件故障:利用重建計算機自帶硬件檢測程序LHWTEST.EXE,再次排除重建計算機硬件(硬盤、光纖接收板、濾波反投影板、主板)故障,因此將故障范圍縮小至軟件方面的問題。軟件故障可能為計算機系統或參數表故障。⑦ 故障排除:鑒于系統安裝較為費時,因此首先嘗試將重建計算機的參數表重新導回,具體步驟為:在主控計算機上進入Local Service→選擇Backup &Restore→點擊Restore→選擇之前備份的[-S-]盤(或之前備份的光盤、U盤等)→選擇最新備份的參數“CT_Scanner”,點擊go,等到左下角出現Ready提示后重啟恢復,反復試掃水模后故障排除[16]。
4.3 故障小結
圖像重建過程中發生的故障現象多為重建速度緩慢、無法重建等,故障原因多為計算機硬件故障,如接收原始數據的光纖接收板損壞,或是加速圖像重建速度的濾波反投影板損壞,此類重建出的圖像倒置故障極為罕見,此類故障無明顯報錯信息,需要逐一排查,產生圖像易引起醫療糾紛,因此需找到故障原因并徹底解決,根據重建采用的算法(濾波反投影法)及涉及的部件分析,最終確定故障原因為重建計算機的參數表問題導致(參數表中包含各類軟硬件校準參數、重建參數、數據庫結構等原始備份),以供同行在遇到此類故障進行參考,同時建議在日常維修過程中要經常備份這類關鍵參數,以備不時之需[17]。
5 討論與總結
目前西門子Definition AS CT在各大醫院普遍都有裝機,絕大多數醫院對一些常見的故障,如球管損壞、高壓打火、探測器模塊損壞、計算機故障等,往往通過整體更換的方式解決,很少嘗試自主維修,且未借助各類維修工具與方法對故障進行系統分析排查,從而導致故障排查不徹底,甚至將故障擴大化[18]。對類似于本文中的復雜故障,又往往缺少成熟的維修經驗與維修思路,未利用現有的工具以最小成本解決問題,從而導致設備的維護成本增加。本文針對上述檢查床、前滑環系統及重建計算機軟件故障等此類復雜故障進行了系統的分析與排查,提出了詳細的維修方法,借助西門子CT維修模式下的功能,篩選出每個關鍵報錯并進行有效判斷,結合設備結構及工作原理,將結構進行簡化和類比(如將床控制板復雜的電路進行簡化、將天線簡化類比為電阻等),從而快速找到故障原因,提出解決方案,通過自主維修以最小的成本解決故障,可節省大量維修經費,減少設備的停機時間[19]。作為臨床工程技術人員,在日常維修過程中需要熟悉設備的基本結構、物理連接以及各部件的工作原理,掌握一些關鍵報錯代碼及分析方法,嘗試不同的維修方法,進行診斷和維修,從而快速解決故障、恢復機器的運行、減少停機時間,提高工作效率[20]。
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
趣味(數學)(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
汽車維修與保養(2019年7期)2020-01-06 03:30:42
消費導刊(2017年20期)2018-01-03 06:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
