基于長短期記憶神經網絡的自適應容錯方法
2023-03-09 03:36:38沈子涵趙修斌劉鑫賢
系統工程與電子技術 2023年3期
沈子涵, 趙修斌,*, 張 闖, 張 良, 劉鑫賢
(1. 空軍工程大學信息與導航學院, 陜西 西安 710077; 2. 中國人民解放軍95510部隊, 貴州 貴陽 550029)
0 引 言
隨著全球導航衛星系統/慣性導航系統(global navigation satellite system/inertial navigation system, GNSS/INS)組合導航系統的廣泛應用,日趨復雜的使用環境使其容錯能力越來越受重視。容錯設計的核心是進行系統自監控,不僅要能夠快速檢測出系統故障,還需要對故障進行識別,并采取有效的處理措施[1-4]。現有的研究大多集中于如何快速檢測出故障,對于故障處理方法的關注較少。然而,對于故障的處理是否恰當,將會直接影響后續的故障檢測能力以及系統的定位精度。因此,對于組合導航的容錯方法有必要進行更加深入的研究。
對于以INS為主體的組合導航系統,一般采用冗余慣性傳感器的結構來提高INS的可靠性[5-9]。在GNSS/INS組合導航系統中,由于INS具有高度自主性,通常認為故障來源于GNSS。目前,工程中常用的GNSS/INS組合方式有松組合和緊組合兩種。其中,松組合利用GNSS解算出的位置、速度等信息[10-11]進行耦合,所以當故障被檢測后,通常以隔離GNSS子系統的方式來消除故障信息的影響。而緊組合直接在偽距、偽距率層面上進行耦合[12-13],能夠通過分量檢測等算法定位發生故障的衛星,為后續的故障處理提供更多的信息。因此,對于緊組合系統的容錯方法研究具有更強的策略性和選擇性。
目前在緊組合中常用的故障處理方法是故障隔離(fault isolation, FI)法,該方法可對GNSS觀測值中的故障維度進行隔離,保留其他正常觀測,以進行后續的組合濾波。相較于隔離子系統的方法,FI法保留了更多有用的信息,所以具有更高的精度[14]。但是面對不同的衛星星數、幾何構型以及故障時間,該方法的性能會受到不同程度的影響[15]。另一種故障處理方法是Teunissen提出的檢測、識別與修復方[16](detection,identification,and adaptation, DIA)法,該方法在檢測并識別故障觀測后,利用模型誤差最優估計值對組合濾波的狀態估計進行修正,以此來達到降低故障對濾波影響的目的。文獻[17]將該方法和傳統的隔離法進行了仿真對比,發現在觀測冗余度較低或者故障觀測對濾波結果的影響較大時,隨著故障持續時間的增加,故障修復(fault adaptation, FA)法的性能要弱于FI法。此外,還有一類故障容錯處理方法通過調整故障觀測在濾波中的權重來降低故障觀測的影響,提升濾波精度。Wang等[18]通過構造比例因子來自適應調節濾波增益矩陣,降低了故障觀測的影響。苗岳旺等[19]利用殘差檢測結果構造了等價方差膨脹因子,對量測噪聲陣進行了自適應調節,降低了粗差觀測值的權重,提升了系統的精度。此類方法的性能在很大程度上取決于權重矩陣的選擇,在實際應用中難以適應不同的環境。
為了克服上述方法的缺點,本文提出了一種基于長短期記憶(long-short term memory, LSTM)神經網絡模型[20-23]的GNSS/INS緊組合系統容錯方法。與故障處理手段單一的傳統方法不同,該方法通過監測故障觀測的相對差分定位精度,能夠實時感知環境變化,自適應調整隔離與重構策略,在降低定位誤差的同時,保證后續的故障檢測性能。為了驗證所提方法的有效性,本文利用實測數據,仿真分析了所提方法與傳統方法在不同環境下的性能表現。
1 局部分量故障檢測法
組合導航中常用的殘差χ2檢測法是一種全局故障檢測法,該方法不能準確判斷故障發生的部位[24]。因此,為了識別并定位故障觀測,本文在故障檢測環節采用了局部分量檢測法。
緊組合中的狀態量和量測值通常可表示為
Xk=Φk,k-1Xk-1+Γk,k-1W
(1)
Zk=HkXk+Vk
(2)
式中:Xk為狀態向量;Φk,k-1為系統狀態轉移矩陣;Γk,k-1為系統噪聲矩陣;Zk為量測向量;Hk為量測矩陣;Wk和Vk分別為系統噪聲和量測噪聲,通常假設它們的協方差矩陣Qk和Rk為零均值高斯白噪聲。
在卡爾曼濾波中,殘差向量表示為
(3)

殘差向量的協方差矩陣可表示為
(4)
當信號無故障時,殘差向量服從零均值的高斯分布,當觀測數據包含故障偏差時,殘差向量均值不再為零。基于這一特征構建故障檢測函數[25-26]如下:
(5)

(6)
式中:α為設定的誤警率;Nα/2(0,1)是其對應的檢測門限,下文記為Td。通過計算殘差向量各維度的檢測函數值,可以實現對故障觀測的檢測與定位。
2 傳統的故障處理方法
2.1 FI法
FI法是在識別故障后,對其進行隔離,并利用剩余的正常觀測進行組合濾波的方法。在此假設故障發生在觀測向量的第i維,系統量測方程為
(7)

(8)
(9)
(10)

2.2 FA法
FA法利用模型誤差的最優估計值對狀態估計進行修正,降低故障誤差對狀態估計的影響。同樣以第i維觀測發生故障為例,模型誤差的最優估計為
(11)

(12)
通過修復后,觀測模型可表示為
(13)

(14)
(15)
3 基于LSTM的故障容錯方法
3.1 LSTM預測模型
深度學習模型是一種擁有多個非線性映射層級的深度神經網絡模型[27],能夠對輸入信號逐層抽象并提取特征,具有很強的非線性特征學習能力[28]。LSTM是一種特殊的循環神經網絡(recurrent neural network,RNN)。相較于普通的RNN,LSTM增加了遺忘門、輸入門和輸出門,能夠快速地適應序列的波動,在長序列中有更好的表現[29-31]。

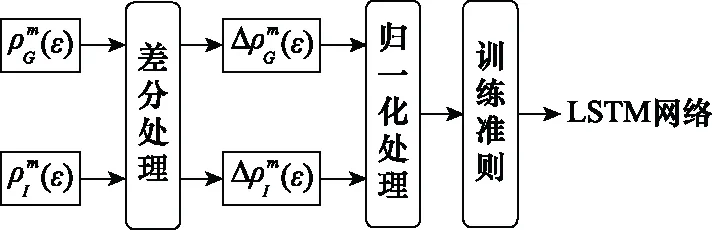
圖1 LSTM的模型訓練流程圖Fig.1 LSTM model training flowchart
在預測過程中,假設ε時刻第m顆衛星的偽距出現故障,持續時長為T,在ε+T時刻的GNSS偽距預測值可以表示為
(16)
用于偽距率重構的LSTM網絡與偽距預測網絡相似,區別在于網絡的輸入和輸出為GNSS和INS的偽距率增量。
3.2 故障隔離與重構方法
利用LSTM預測模型進行自適應故障容錯的流程圖如圖2所示。其中,μ為相對差分定位精度(relative differential precision of positioning, RDPOP)的門限,通常根據濾波精度需求設置。
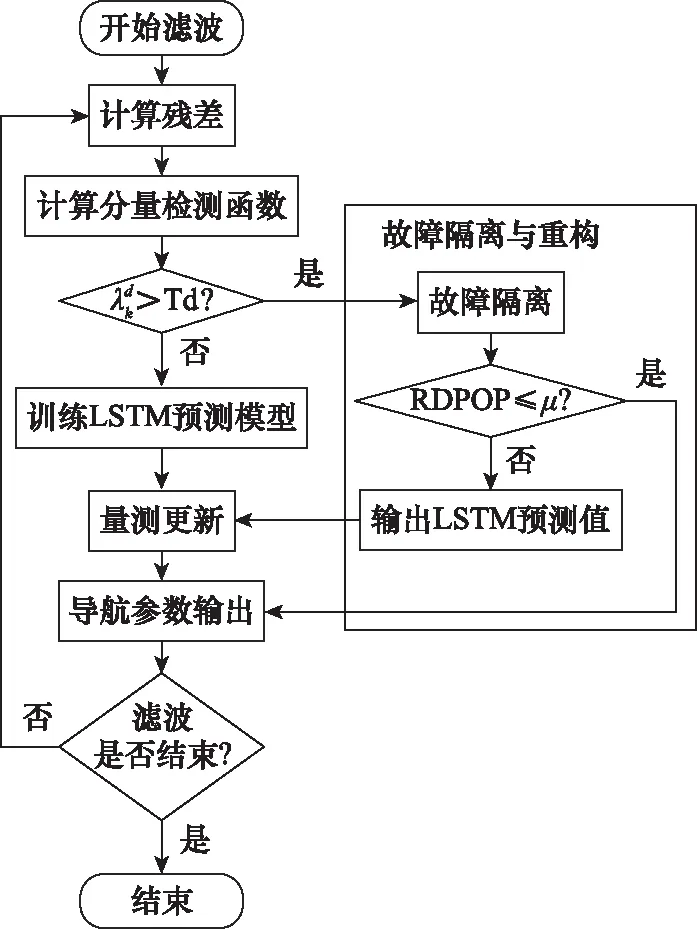
圖2 基于LSTM的故障容錯方法流程圖Fig.2 Flow chart of fault tolerance method based on LSTM
圖2主要包括以下幾個步驟。
步驟 1計算k時刻濾波的殘差及其協方差。

步驟 4k時刻濾波結束,下一時刻返回步驟1。
RDPOP反映了隔離某顆衛星觀測后濾波精度的下降程度,RDPOP值越大,該衛星的觀測對濾波的影響越大。其表達式如下:
(17)

4 實驗結果與分析
為驗證所提方法的有效性,本文利用SPAN-CPT緊組合導航產品采集了一組INS原始數據和GNSS數據,其輸出頻率分別為100 Hz和1 Hz。采集的衛星觀測數據來自G1,G6,G7,G8,G9,G11,G13,G19和G27,共9顆星,實驗地點為西安市一學校操場,實驗中慣性器件參數如表1所示。
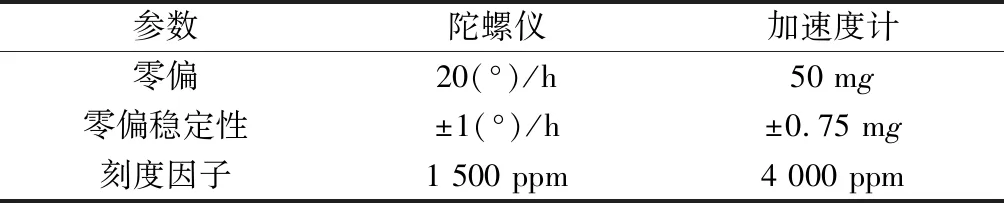
表1 慣性器件技術參數
4.1 預測模型性能驗證
在本文所提方法中,LSTM預測模型的精度會對系統容錯能力造成很大影響,所以首先對LSTM預測模型的性能進行驗證。選取實測數據中131~190 s(時段1)和261~320 s(時段2)兩個時段內的G9的GNSS偽距進行預測,并與文獻[16]中的預測模型進行對比,將該模型記作模型1,將本文預測模型記作模型2。圖3是實測數據中載體的運動軌跡,其中131 s~190 s載體以圓周運動為主,261~320 s載體以直線運動為主。
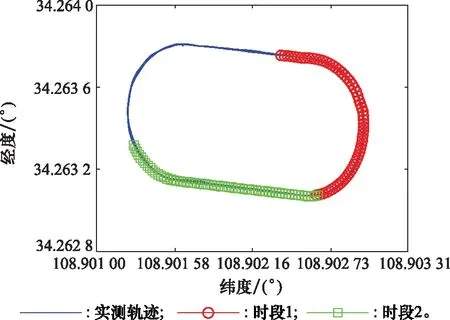
圖3 載體運動軌跡Fig.3 Carrier trajectory
兩種方法對兩個時段的偽距增量預測情況如圖4所示。表2列出了兩種模型的預測誤差,分別為平均絕對誤差(mean absolute deviation, MAD)和均方根誤差(root mean squared error, RMSE)。
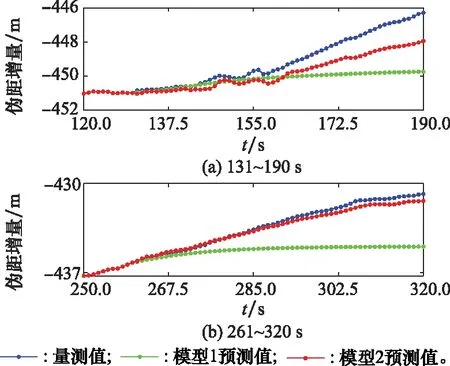
圖4 偽距增量預測值Fig.4 Predicted values of pseudo-range increment
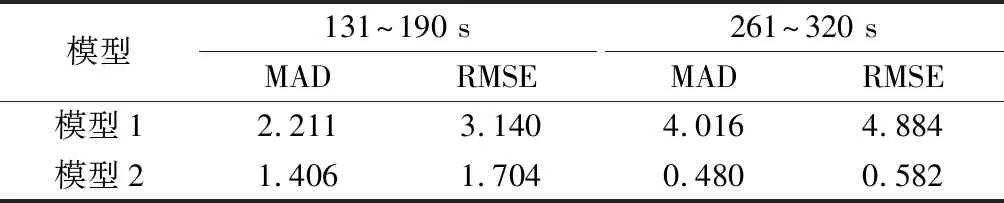
表2 預測誤差
由圖4可知,模型2相較于模型1能夠更好地跟蹤衛星偽距變化趨勢。分析表2可以發現,在60 s的預測中,無論載體進行的是時段2內簡單的直線運動還是時段1內的圓周運動,通過INS信息的輔助,模型2具有遠小于模型1的預測誤差,預測精度較高,更能體現原數據的特質。
4.2 系統容錯性能驗證
在容錯性能分析中,選取FI法和FA法進行對比實驗,并從定位精度和故障檢測能力兩個角度來考察本方法的性能優勢。其中,FI法和FA法分別記為M1和M2,基于LSTM的故障容錯方法記為M3。
為驗證本文所提方法對復雜環境的適應性,在實測數據中選取了5組不同的環境來進行仿真驗證,具體參數如表3所示。其中,環境1至環境4的故障時長為20 s,兩兩分組設置了不同的可見星數和幾何構型,而環境5將故障持續時間增加至60 s。在實驗中,α設為0.001,Td設為3.29,μ設為0.1,衛星觀測故障時的偏差設為80 m。
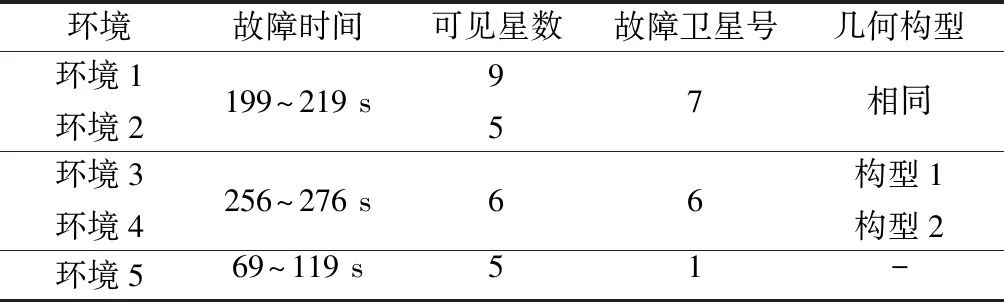
表3 環境數據
4.2.1 不同環境下RDPOP值分析
在組合導航實際應用中,可見星數、幾何構型和故障持續時間均會對各觀測維度的RDPOP值造成影響。為驗證本文所提方法對環境的感知能力,需要對不同環境下RDPOP值的變化情況進行分析。
各環境在故障持續20 s內的RDPOP值如圖5所示。
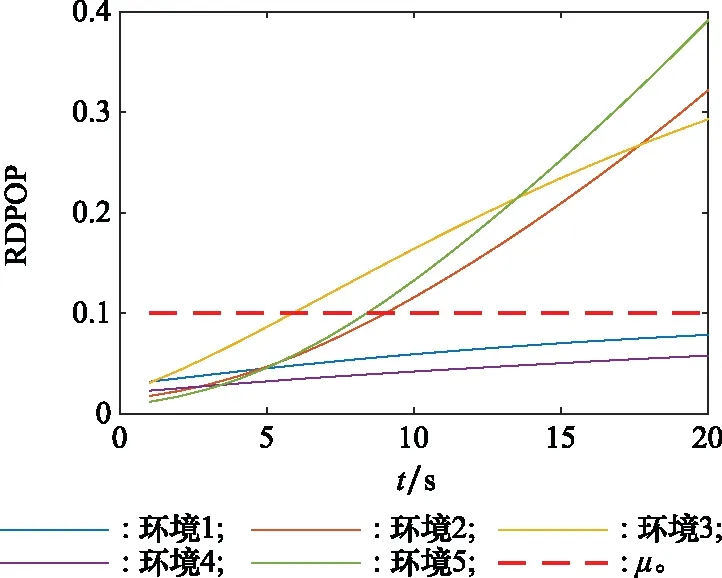
圖5 各環境下故障觀測的RDPOP值Fig.5 RDPOP values of fault observation in all environments
其中,環境2、環境3和環境5的RDPOP值在故障發生10 s內均超出了設置的閾值,說明在這些環境中,故障衛星的觀測值會對濾波精度造成更大影響。值得注意的是,環境1和環境2、環境3和環境4兩兩之間只有一項觀測指標不同,但其RDPOP值相差巨大。這是因為可見星數的減少和幾何構型的變化導致衛星信號觀測環境惡化,故障衛星觀測值在位置解算中占據了更大的權重。
基于上述分析,本文在定位精度和故障檢測性能驗證實驗中,選取環境2、環境3和環境5進行3種容錯方法的對比實驗,以驗證本文方法在較差觀測環境下的容錯性能。
4.2.2 定位精度驗證
考慮到在不同環境下,即使觀測無故障,系統的定位誤差也不盡相同,所以本文在分析定位精度時引入了系統無故障時的定位誤差。3種方法在環境2、環境3和環境5下的定位誤差如圖6所示。為更加直觀地體現各算法的性能,表4給出了各算法與系統無故障解算的相對RMSE (relative RMSE,RRMSE)。圖6中,3種方法的定位誤差在故障出現后開始發散。在故障初期,故障衛星的RDPOP值小于所設閾值,此時M3采用的是傳統的隔離策略,其誤差曲線與M1和M2相似。隨著時間的推移,M3的誤差曲線收斂得更早,具有比M1和M2更小的定位誤差。這是因為當故障觀測的RDPOP值超出設定閾值后,M3開始調用LSTM預測值對故障觀測進行重構,相較于M1和M2,在消除故障影響的同時,防止了由對濾波精度具有較大影響的觀測值的缺失帶來的精度下降問題。由表4可知,M3的定位誤差遠小于相同環境下的M1和M2,說明本文所提方法具有更好的環境適應性,能夠提高較差觀測環境下導航系統的定位精度。
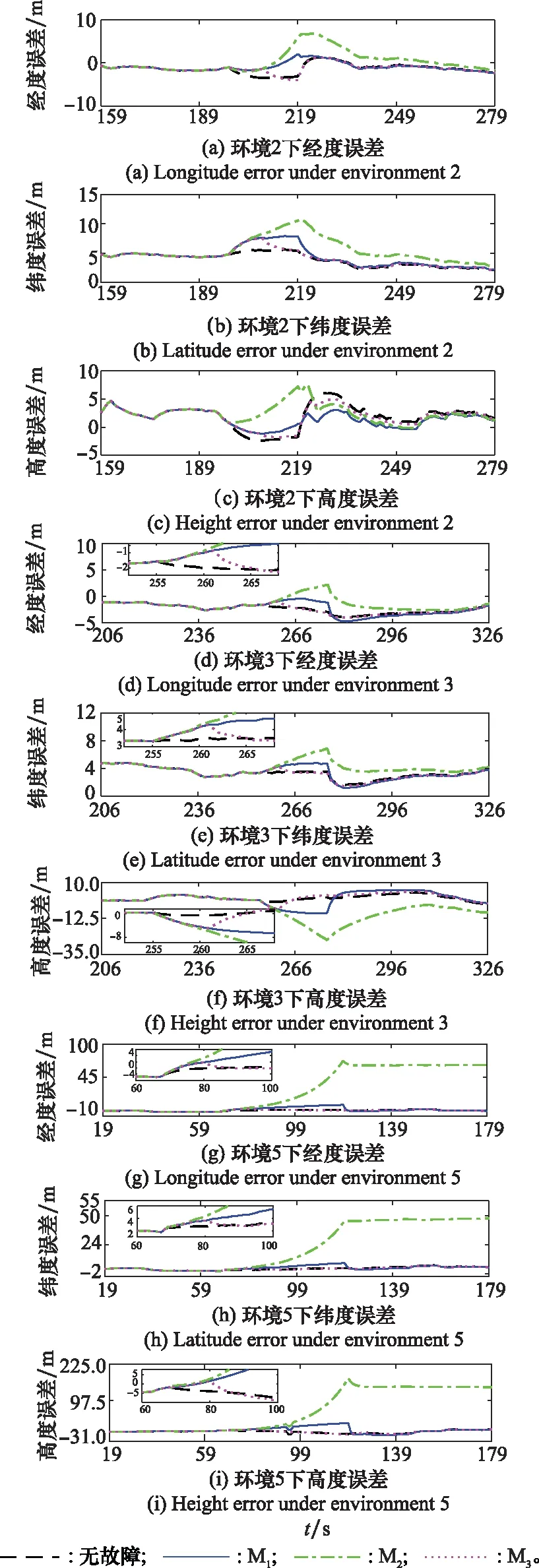
圖6 3種環境下的定位誤差Fig.6 Positioning errors in three environments
4.2.3 故障檢測性能驗證
當系統出現故障時,實際觀測值與狀態預測值會出現較大差異,基于殘差的故障檢測算法正是利用這一特性進行故障檢測與識別。因此,濾波輸出的狀態值是否準確會對檢測函數的性能造成影響。
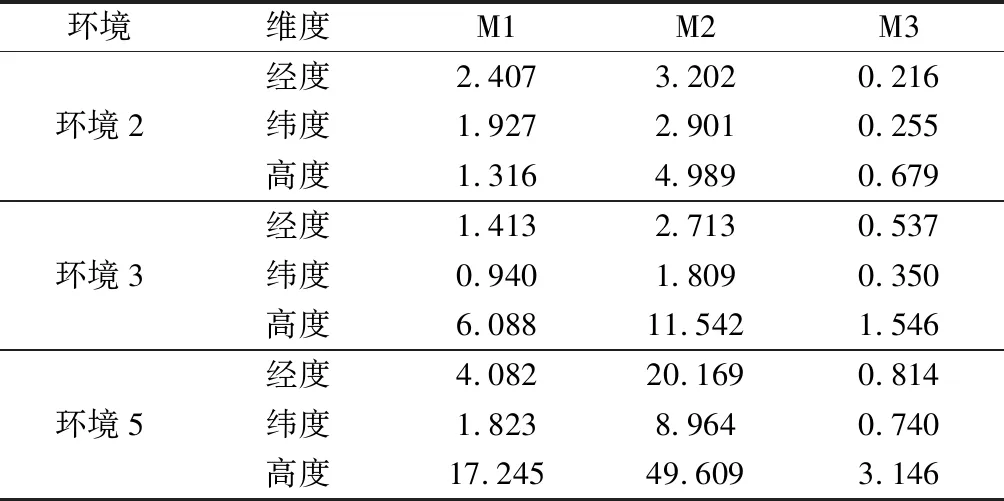
表4 故障期間各方法的定位誤差
為分析各方法在復雜環境下的故障檢測性能,圖7給出了環境2、環境3和環境5下的檢測函數。其中,M1與M2的檢測函數在故障發生時達到最大值,之后逐漸降低。值得注意的是,在環境5的長故障中,二者檢測函數的下降導致系統發生漏警,并且在故障結束后持續誤警。這是因為在長故障中,濾波精度的持續下降會使濾波輸出持續“跟蹤”觀測值,殘差會逐漸收斂,導致檢測函數值降至閾值以下,發生漏警。而在故障結束時,觀測信息的突變再次使檢測函數急劇增大,造成誤警。
相較于M1和M2,M3的檢測函數雖然在故障初期也出現下降趨勢,但是通過RDPOP值的監測,能很快重構故障觀測,在降低濾波誤差的同時保持了殘差的穩定,使檢測函數恢復正常狀態。該結果表明,所提方法能夠有效降低由故障觀測帶來的漏警和誤警風險。
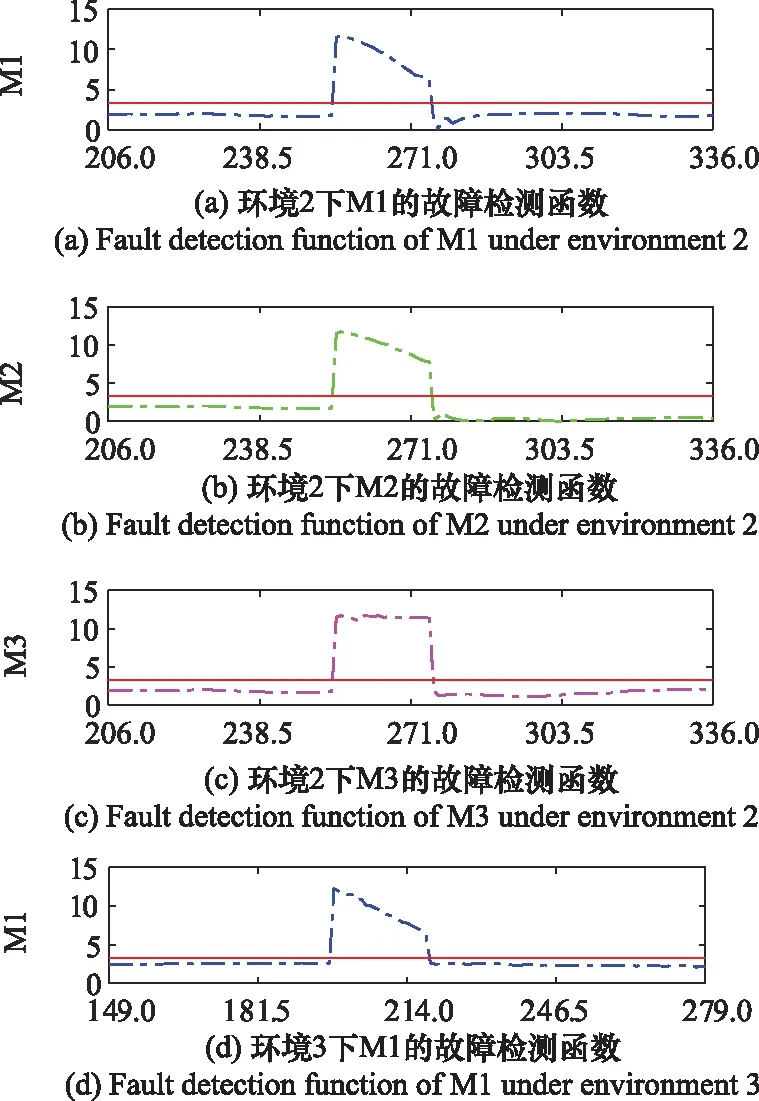
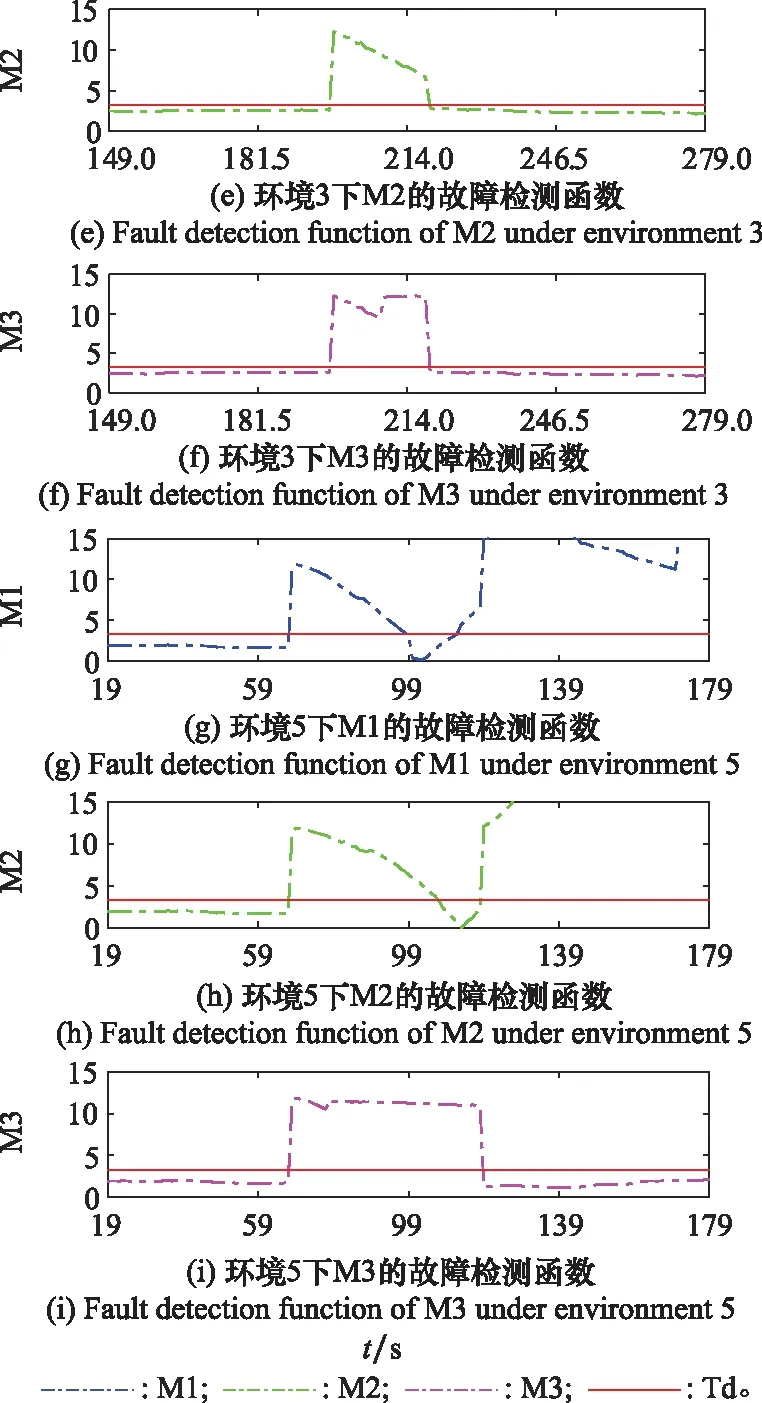
圖7 3種環境下的檢測函數Fig.7 Detection function values in three environments
5 結 論
本文從對故障的容錯處理會影響定位精度以及后續故障檢測性能的角度出發,針對傳統的容錯方法適應能力不足、復雜環境下會導致定位精度下降、故障檢測失靈的問題,提出了一種基于LSTM的GNSS/INS緊組合系統容錯方法。該方法通過動態選擇隔離與重構策略,使系統能夠適應不同的觀測環境。在較差觀測環境下,相較于傳統方法,本文所提方法能夠極大地降低故障期間的定位誤差,提升故障檢測性能,并解決長故障帶來的漏警和誤警問題,有效增強了GNSS/INS緊組合系統的完好性和可靠性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年11期)2019-01-07 01:28:02
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12