無人機集群分組編隊控制跟蹤一體化設計
2023-03-09 03:36:54楊秀霞姜子劼
系統(tǒng)工程與電子技術 2023年3期
張 毅, 于 浩, 楊秀霞, 姜子劼
(海軍航空大學, 山東 煙臺 264001)
0 引 言
近年來,無人機(unmanned aerial vehicle, UAV)因其獨特的優(yōu)勢被廣泛應用于軍事和民用領域。單架UAV因機載傳感器的限制,難以執(zhí)行復雜作戰(zhàn)任務,而由多UAV組成的編隊兼具各架UAV的性能優(yōu)勢,顯著提高了系統(tǒng)的容錯率和作戰(zhàn)效能[1-4],已成為當前研究的熱點。編隊控制技術也隨之取得了長足的發(fā)展,經典的編隊控制方法包括:領導-跟隨法[5-6]、虛擬結構法[7-8]、基于行為法[9-11],而上述3種編隊控制方法均存在一定的缺陷。其中,領導-跟隨法受編隊結構的約束,存在編隊容錯率較低的缺點;虛擬結構法描述的編隊隊形相對固定且計算量大;基于行為法難以用數學方法描述UAV的具體行為,不利于系統(tǒng)的穩(wěn)定性分析。
一致性編隊控制方法采用分布式的通信拓撲結構描述編隊內各成員的信息交互,對全局信息的依賴性顯著降低,具有編隊擴展性強、穩(wěn)定性好的優(yōu)勢。隨著該理論的應用和發(fā)展,國內外學者對于分布式編隊的研究愈加深入[12-13]。Ren[14]設計了一致性編隊控制協議,實現了對微型UAV編隊的控制,并指出前3種編隊控制方法均可在一致性編隊控制的框架下得到統(tǒng)一。Kang等[15]研究了時變編隊的魯棒控制問題,基于智能體鄰接信息設計控制器,使編隊在跟蹤預定軌跡的同時能夠保持較好的抗干擾性能。Dong等[16-18]研究了UAV集群時變編隊控制問題和編隊包含控制問題,并在實驗平臺進行了驗證。符小衛(wèi)等[19]針對動態(tài)障礙物的規(guī)避問題,結合一致性理論和人工勢場法設計了控制律,實現了障礙環(huán)境下的分布式隊形控制。Liu等[20]對含時滯約束的多智能體編隊控制問題進行了研究,更加符合現實意義。
需要指出的是,上述文獻僅對單一編隊的控制進行了研究。然而,在多目標圍捕、協同飽和攻擊、多目標協同搜索等實際作戰(zhàn)場景中,單個編隊無法協同高效地完成作戰(zhàn)任務。此時,需要將系統(tǒng)分為多個編隊,并通過編隊間的相互配合,發(fā)揮系統(tǒng)的整體效能。
目前,對于多編隊控制問題的研究成果較少,且由于涉及編隊內部及編隊間的相互協同,相關研究更具有挑戰(zhàn)性。國內外學者大都基于多一致性的編隊控制方法進行研究。Dong等[21]最早將多一致性理論應用到編隊控制問題中,研究了有向通信拓撲下的一般線性多智能體系統(tǒng)的時變多編隊控制問題,但各個編隊是相對孤立的個體,缺乏編隊間的相互協同。Han等[22]分別針對固定拓撲和切換拓撲設計了多編隊控制協議,但從仿真結果來看,在完成編隊分組后,組內智能體只是被動地跟蹤領導者,同樣缺乏編隊間的信息交互。田磊等[23-24]分別對同構和異構智能體系統(tǒng)的分組編隊跟蹤控制問題進行了研究,實現了分組編隊的協同配合。另外,Chen和王祥科等[25-26]為解決大規(guī)模UAV集群的控制問題,基于領導-跟隨的編隊結構提出了一種分布式多編隊分層控制架構,分別設計了長機層和僚機層的控制律,領導者通過跟蹤期望航路點實現編隊之間的分組協同,跟隨者跟蹤所屬編隊的領導者協同完成共同的子任務,進而實現了整個集群的協同控制。
受上述文獻啟發(fā),為解決UAV多編隊在有向通信拓撲下的協同控制問題,本文基于參數組的隊形描述方法,提出了一種滿足組內組間協同的UAV多編隊跟蹤控制算法。相較于文獻[23-26],本文提出的控制策略更加注重編隊之間以及編隊內部各UAV之間的協同,能夠克服上述控制方法因隊形向量固定致使集群分組隊形難以變換的缺陷,確保集群隊形變換更加靈活。首先,建立分層雙虛擬控制結構,分別在頂層和底層的控制架構中設置基準UAV,以軌跡UAV為中心實現組內和組間隊形的協同變換,并結合一致性控制理論設計了基于鄰接誤差的編隊控制律,同時給出了系統(tǒng)穩(wěn)定的條件;其次,設計了以目標跟蹤為導向、編隊控制為基礎的分組編隊目標跟蹤控制一體化設計方案,將頂層編隊的目標跟蹤細化為兩個子任務:一是集群領導者對機動目標的跟蹤,二是編隊之間的協同控制,從而實現了編隊控制與目標軌跡跟蹤的一體化設計,克服了傳統(tǒng)目標跟蹤方法相位調整時間長的缺陷;最后,仿真結果證實了本文控制律設計的有效性。
1 預備知識和問題描述
1.1 圖論
假設1對于UAV集群系統(tǒng)中的每個編隊而言,均存在以編隊領導者為根節(jié)點的有向生成樹,且跟隨者之間以及編隊領導者之間均可視為雙向通信。
引理1在假設1成立的條件下,若至少存在一個跟隨者與編隊領導者相連,則矩陣L+γb′是正定的[27-28]。
引理2在假設1成立的條件下,對所有x∈Rn,λmax(Ll)xTx≥xTLlx≥λmin(Ll)xTx成立,其中λmax(Ll)和λmin(Ll)分別為Ll的最大特征值和最小特征值[29]。
1.2 分組編隊控制架構
針對UAV集群分組編隊跟蹤控制問題,建立由集群領導者、編隊領導者和編隊跟隨者組成的分層協同控制框架,具體結構如圖1所示。與文獻[23-25]中的控制方案不同,本文在頂層和底層編隊內分別設置軌跡導引UAV和基準UAV,以實現集群的協同,該控制架構采用并行的分布式通信結構,為大規(guī)模UAV集群的分組編隊協同控制提供了可行方案。
集群領導者:包括2架虛擬無人機UAVp和UAVb,其中UAVp決定整個集群的運動軌跡,UAVb為各編組間的相位協同提供基準,集群領導者只單向傳輸信息給編隊領導者,不接收其他任何UAV的信息。
編隊領導者:每個編隊內包括真實領導者UAV0和虛擬領導者UAVb′,其中UAV0負責導引該編隊的飛行軌跡,UAVb′為該分組內UAV提供相位基準,其他成員為跟隨者,編隊領導者UAV0不接收跟隨者的信息,只接收來自集群領導者和其他編隊領導者的信息,跟隨者只接收來自其所在分組中編隊領導者和其他跟隨者的信息。
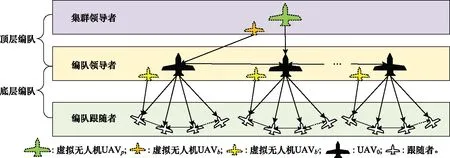
圖1 UAV集群控制架構Fig.1 Control architecture of UAV swarm
對于基準UAV的功能,本文將在第2節(jié)結合圖2做詳細說明。為方便描述,后文提到的集群領導者和編隊領導者均指軌跡導引無人機UAVp和UAV0。
1.3 模型建立
考慮由n架UAV組成的集群系統(tǒng),通信拓撲可以用有向圖來描述。傳統(tǒng)線性模型難以準確刻畫UAV的非線性本質,為確保模型的精確性,參考文獻[30],本文以旋翼UAV為研究對象,采用帶有Lipschitz項的非線性模型來描述UAV的動力學模型。
(1)

式中:μ>0是一個常數。
本文在研究編隊分組控制時,主要關注UAV的位置和速度變化,因此忽略了內環(huán)姿態(tài)控制的影響,定義輔助控制量uj(t)∈Rd:
(2)
則式(1)中的動力學模型可改寫為
(3)
同時,為滿足實際條件,設置UAV的飛行速度滿足如下約束:
集群領導者UAVp的動態(tài)模型可表示為如下形式:
(4)
式中:pp(t)、vp(t)分別表示t時刻集群領導者UAVp的位置和速度;up(t)是控制輸入量,決定整個集群的狀態(tài)軌跡。
虛擬領導者UAVb和UAVb′分別為編隊領導者之間和編隊跟隨者之間提供相位基準,兩者的動態(tài)模型可描述為
(5)
式中:pk、vk和uk分別表示UAVk的基準向量、基準變化量和基準控制量;k∈{b,b′}。需要注意的是,uk為預定參數,pk和vk受uk的控制,pk和vk在此作為隊形參數歸一化后的位置和速度。
假設整個集群被劃分為m(m≥1)個編隊,則根據圖1所示的架構,系統(tǒng)中包括:1個集群領導者UAVp和虛擬領導者UAVb,m個編隊領導者UAV0和虛擬領導者UAVb′,n個跟隨者。為方便理解圖1所示的控制架構,下面分別對編隊內部和編隊之間的通信拓撲進行描述。

據此,系統(tǒng)中所有真實UAV的鄰接矩陣可描述為
式中:矩陣A的對角元素(矩陣)表示編隊內部各UAV之間的通信關系,而非對角元素(矩陣)為編隊之間的信息交互,即編隊領導者之間的通信。
2 集群編隊隊形描述
圖1對集群宏觀層面的控制策略進行了描述,下面給出編隊之間和編隊內部UAV之間的具體控制策略。首先以某一底層編隊為例,通過構造隊形參數組,實現基于平移、縮放和旋轉3種基本運動的編隊控制:
T(N)={p0(t),pb′(t),C1(t),…,Cnl(t)}
(6)
Ci(t)=ri(t)Ri(t),i∈{1,2,…,nl}
(7)
式中:p0為編隊領導者的位置,其作為編隊中心,決定編隊的空間位置,而不影響編隊的幾何構型;ri≥0為縮放參數,表示UAVi到編隊中心p0的距離;Ri∈SO(2)為旋轉參數,表示由當前位置到期望位置的旋轉變換矩陣。縮放運動與旋轉運動都是相對UAVb′而言的,兩者共同決定了編隊的幾何構型。
式(6)的參數組T(N)包含了所定義的期望編隊隊形的諸個要素,下面給出基于隊形參數組的UAV編隊控制問題的具體定義。
定義1對于底層編隊中任意跟隨者的初始狀態(tài),若滿足
(8)
則稱實現了對底層編隊期望隊形的控制。式中,hi(t)=p0(t)+Ci(t)pb′(t),表示期望的編隊隊形,具體可描述為:各跟隨者到達以編隊領導者為中心、以虛擬領導者為基準的期望位置。
考慮
pb′(t)=[cos(θb′(t)) sin(θb′(t))]T
(9)
(10)
基于參數組編隊隊形的具體描述如圖2所示。
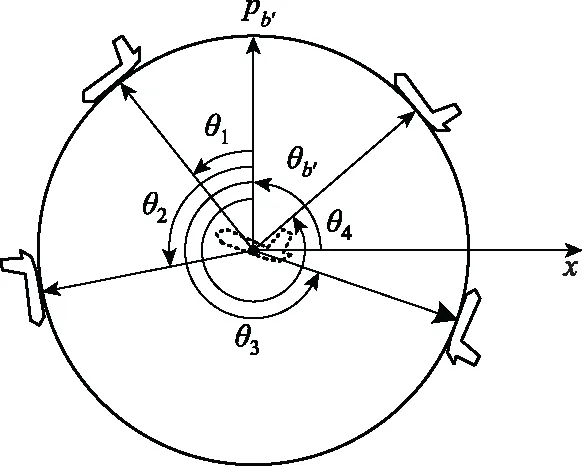
圖2 編隊隊形描述示意圖Fig.2 Schematic diagram of formation description
如圖3所示,編隊之間的協同與編隊內部UAV之間的協同類似,不同之處在于集群領導者作為控制集群飛行的中心,而各編隊領導者作為跟隨者,以UAVb為基準實現相位協同。
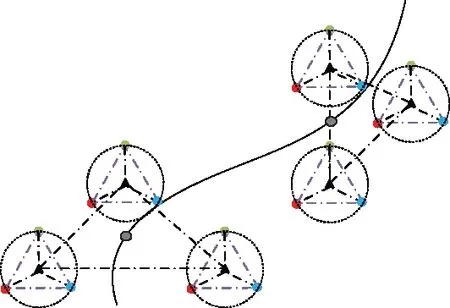
圖3 多編隊協同示意圖Fig.3 Schematic diagram of multi-formation cooperation
此時,隊形參數組和隊形控制定義均有所改變。
(11)
(12)

定義2對于頂層編隊中任意編隊領導者的初始狀態(tài),若滿足:
(13)
另外,如圖4所示,通過隊形參數組的合理設計,可實現由多分組編隊到單一編隊的切換,用于執(zhí)行目標圍捕、協同飽和攻擊等對UAV數量要求較高的復雜任務。

圖4 多分組編隊切換為菱形編隊Fig.4 Switching from multi-group formation to diamond formation
基于上述控制策略,通過對兩組隊形參數的合理設計,能夠實現編隊內部各UAV之間的協同,并確保各編隊之間的相互聯系、密切協作,進而為組內組間集群隊形協同變換創(chuàng)建基礎。
3 控制律設計
為實現整個UAV集群的協同控制,分別對底層編隊和頂層編隊進行控制律設計。其中,頂層編隊既要實現編隊領導者之間的協同,又要確保對目標的精確跟蹤,為使整體效能最大,設計編隊控制與目標跟蹤一體化的控制策略。
3.1 底層編隊控制律設計
(14)
求導可得編隊l的速度誤差為
(15)
定義3對于任意編隊l,給定任意初始狀態(tài),若滿足:
則稱編隊內的無人機能夠實現期望的編隊隊形并保持。式中,hij(t)=hi(t)-hj(t)。
對編隊跟隨者設計基于鄰居UAV誤差信息的編隊控制律:
(16)
式中:aij為對角矩陣A中的元素;k為控制增益;μ為Lipschitz常數;?表示克羅內克爾積;In表示元素全部為1的n維列向量。
定理1對于任意底層編隊l,如果控制增益k滿足:
(17)
則稱在隊形參數組和編隊控制律(16)的作用下,UAV編隊形成期望的編隊隊形。
證明分別對式(14)和式(15)求導,進一步可得誤差方程:
(18)
編隊誤差方程可轉化為
(19)
由此,將編隊控制問題轉化為閉環(huán)系統(tǒng)的穩(wěn)定性問題。定義具有如下形式的Lyapunov函數:
Vl(t)=
(20)
下面證明Vl(t)的正定性:
(21)
即有:
(22)
由克羅內克爾積的性質:
(1) (A?B)(C?D)=AC?BD;
(2) (A?B)-1=(A-1?B-1);
可得
(23)
則有
(24)
Vl(t)對時間求導可得
(25)
根據Lipschitz條件可得
(26)
根據引理2可得
(27)
證畢
3.2 頂層編隊控制律設計
對于頂層編隊的跟蹤任務而言,集群領導者只需在采樣時刻持續(xù)不斷地對目標實施追蹤,各編隊領導者以集群領導者為中心,在基準UAV的作用下保持相位協同即可完成對機動目標的跟蹤,克服了傳統(tǒng)跟蹤算法放棄了在UAV運動至跟蹤過程中對相位調整的機會、從而導致相位調整時間較長的問題。由此,頂層編隊的目標跟蹤控制可具體細化為:① 集群領導者對機動目標的跟蹤;② 編隊領導者之間的協同控制。
3.2.1 目標跟蹤策略設計
假設目標的機動形式未知而其運動狀態(tài)在每個采樣時刻均是可測的,則可在每個采樣時刻,根據目標的運動狀態(tài)調整UAVp的運動方向,使其不斷趨近目標的位置,直至與目標重合。頂層編隊跟蹤目標軌跡如圖5所示。
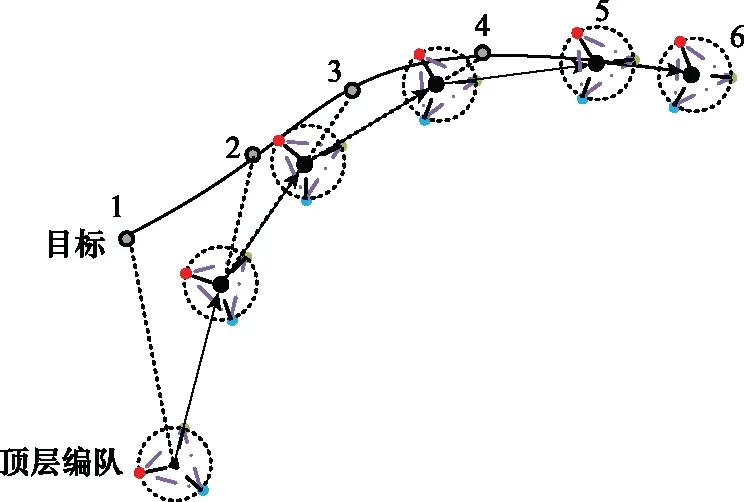
圖5 頂層編隊跟蹤目標軌跡Fig.5 Top formation tracking target trajectory
跟蹤過程可描述如下:



步驟4重復步驟2~步驟3,直至UAVp跟蹤上目標。
3.2.2 頂層編隊控制律設計
分別定義頂層編隊的速度誤差及位置誤差:
(28)
(29)
定義4對于整個集群編隊,給定任意初始狀態(tài),若存在某一有界時刻t0,使得當t≥t0時,滿足:

參照式(14),設計頂層編隊控制律為
(30)

定理2對于頂層編隊,如果控制增益k滿足:
(31)
則稱在隊形參數組和控制律(30)的作用下,期望的頂層編隊隊形生成并保持。
證明過程參照定理1,在此不再贅述。

4 仿真驗證
為驗證本文提出的集群控制架構和控制算法設計的有效性,設置仿真場景如下:
如圖6所示為集群通信拓撲結構,集群由20架UAV組成,其中包括4個編隊領導者和16個跟隨者,0、b和bi分別表示集群領導者UAVp、虛擬領導者UAVb和虛擬領導者UAVb′。
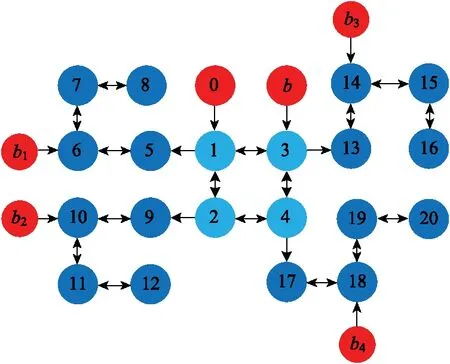
圖6 集群通信拓撲結構Fig.6 Communication topology of swarm
設集群領導者的Lipschitz非線性項為
編隊領導者和跟隨者的Lipschitz非線性項為
即Lipschitz常數μ=0.1。
為滿足系統(tǒng)穩(wěn)定條件,令控制增益k=1.5。為驗證控制效果,設置不同時刻的集群隊形參數和編隊隊形參數如表1、表2所示,分別決定頂層編隊和底層編隊的期望隊形。為方便表述,令θ′i表示θ′1=θ′2=θ′3=θ′4,ri表示r1=r2=r3=r4。
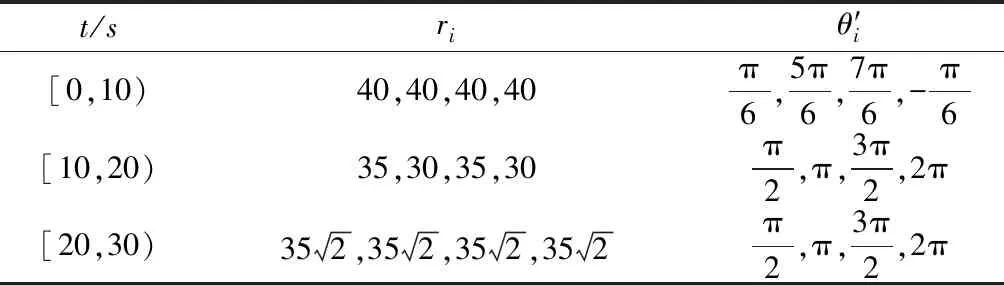
表1 集群隊形參數

表2 編隊隊形參數
設定UAV的速度和加速度約束如表3所示。
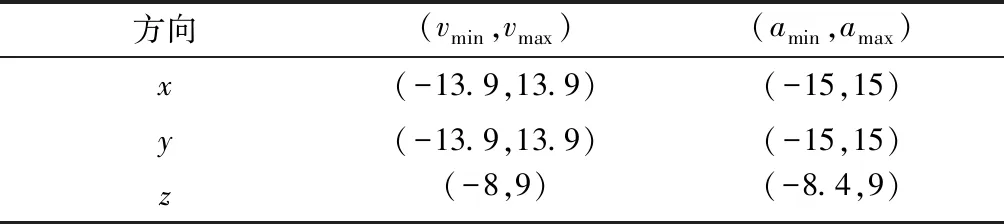
表3 速度和加速度約束
編隊領導者的初始條件如表4所示,跟隨者的位置和速度在滿足飛行約束條件下隨機生成。
表4 編隊領導者的初始條件
4.1 分組編隊控制仿真
任意取定集群領導者加速度,對集群分組編隊控制算法進行驗證。取定的加速度為
圖7表示不同時刻的集群運動軌跡,通過隊形參數組的設置,各編隊以集群領導者為中心,在不同時刻形成期望隊形,圖中形狀相同的為同一組別的UAV,實線標注的為編隊領導者的運動軌跡,黑色虛線標注的形狀表示當前時刻的集群構型。從圖7中可以看出:t=9 s集群為方形,t=19 s集群已變換為菱形,t=29 s時集群已完成由多編隊到單一編隊的切換。

圖7 不同時刻(9 s、19 s、29 s)的集群運動軌跡Fig.7 Swarm trajectories at 9 s, 19 s and 29 s
由于仿真中UAV數量較多,為方便閱讀,僅將編隊領導者和集群領導者的運動軌跡標注至圖7中。
由圖8和圖9可知,在5s左右,集群完成期望的多編隊分組,速度和位置誤差均趨于零,而隨著隊形參數的改變,在t=10 s、t=20 s時誤差出現波動,隨后在控制律作用下很快趨于零。圖10和圖11展示了底層編隊的位置和速度誤差,可知編隊層面的位置和速度誤差均能夠實現快速收斂。由仿真結果可知,在實現編隊之間協同變換的同時,編隊內部各UAV也能夠按照預設參數實現隊形變換,顯然控制律的設計滿足期望的控制要求。
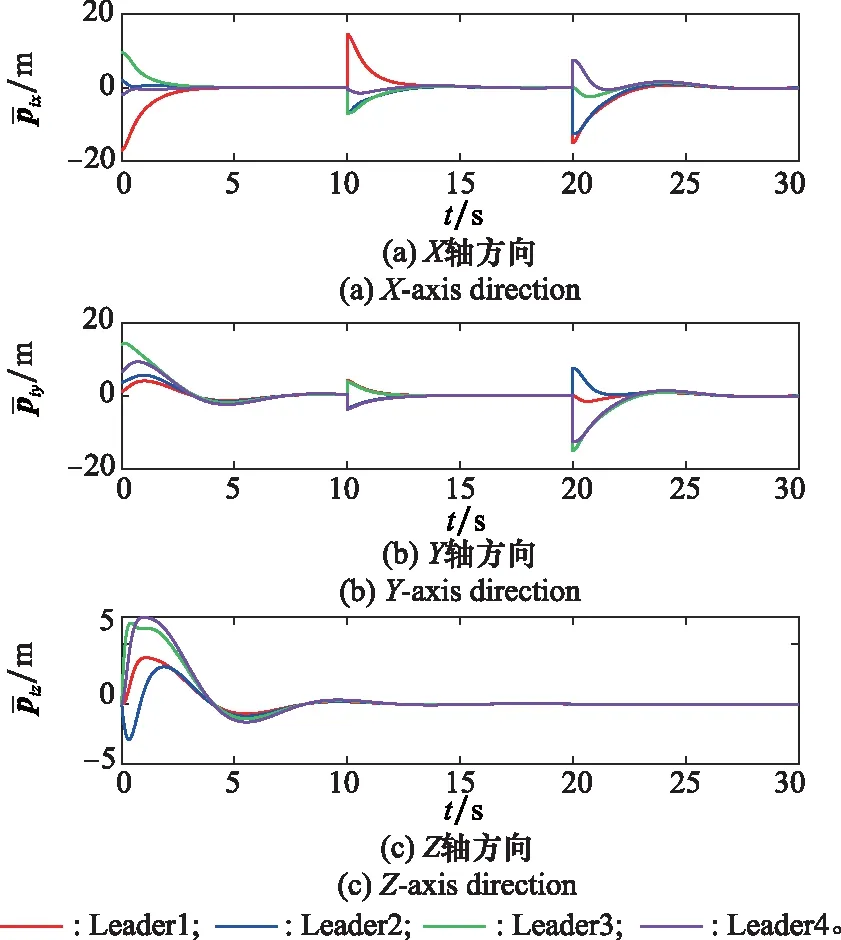
圖8 頂層編隊位置誤差Fig.8 Position error of top formation
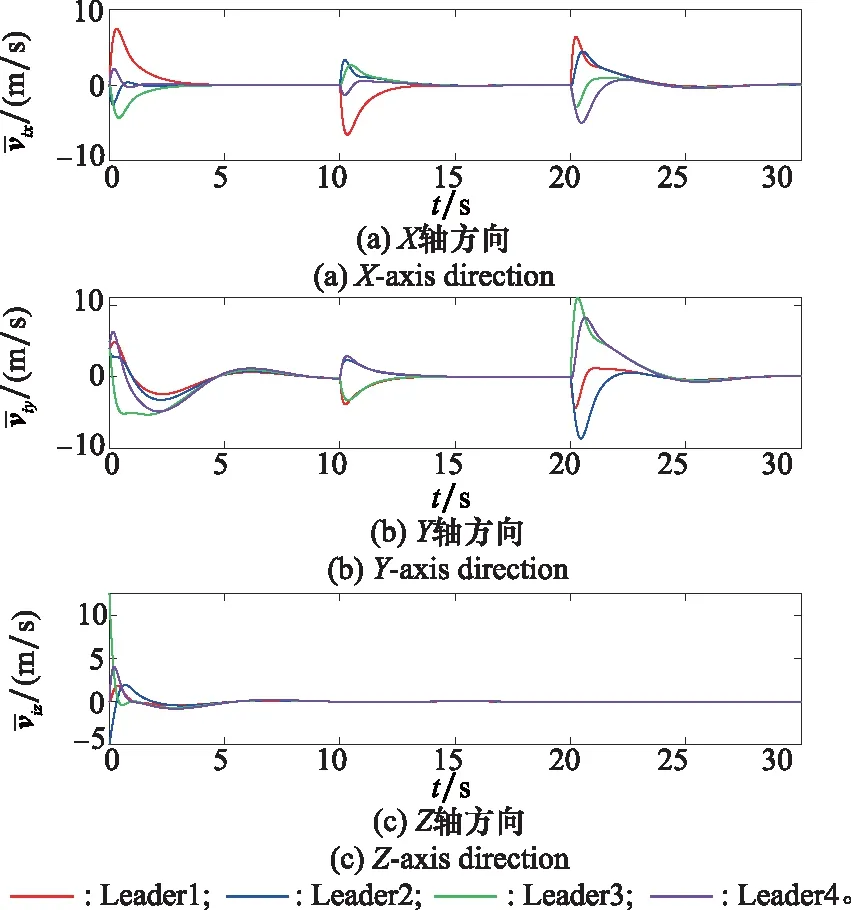
圖9 頂層編隊速度誤差Fig.9 Velocity error of top formation
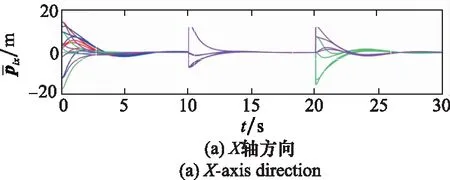
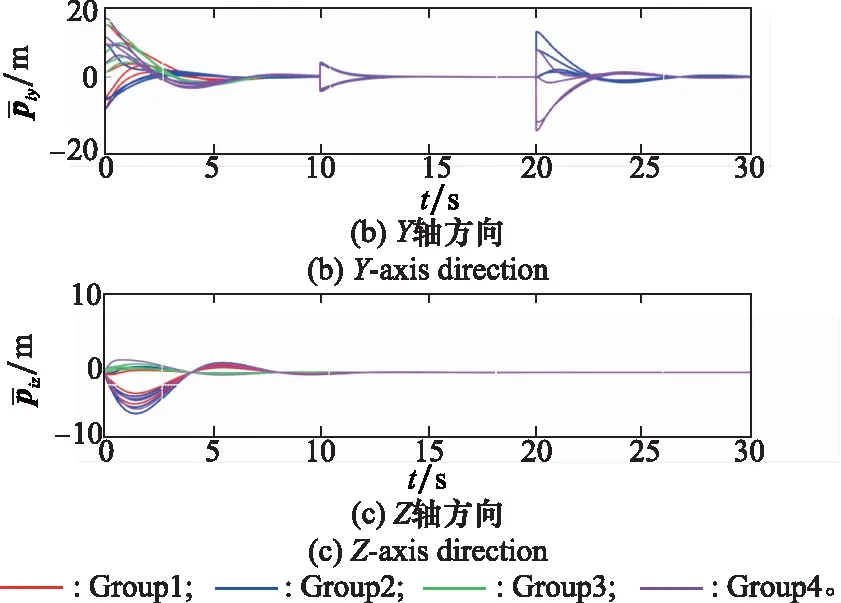
圖10 底層編隊位置誤差Fig.10 Position error of bottom formation
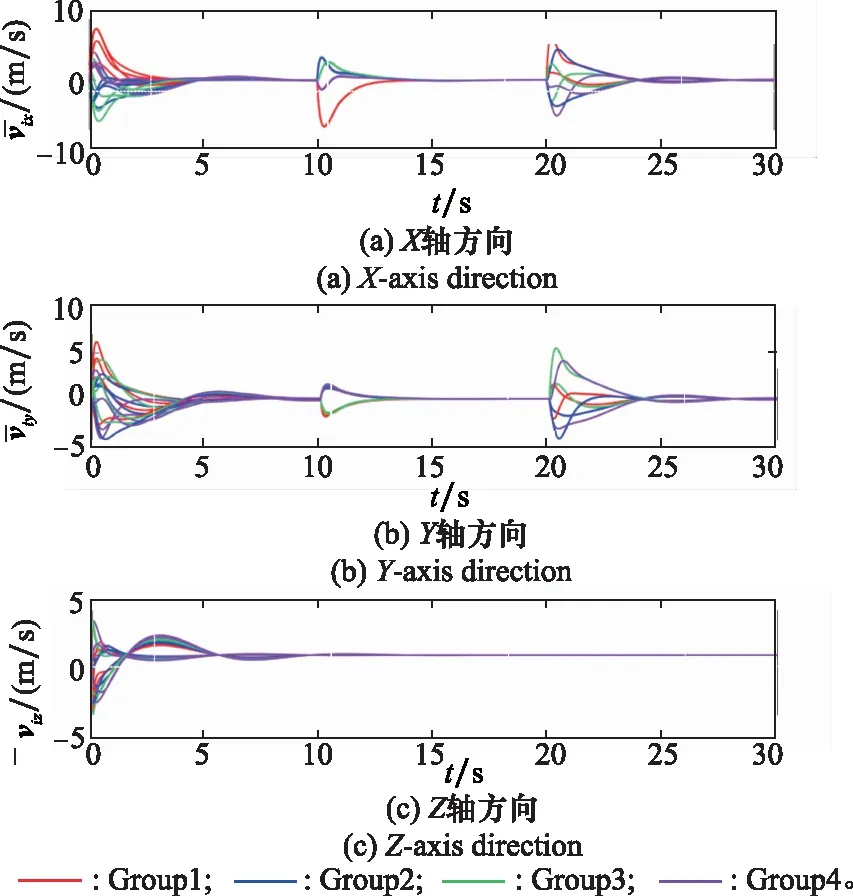
圖11 底層編隊速度誤差Fig.11 Velocity error of bottom formation
4.2 分組編隊控制仿真對比
為進一步驗證本文控制策略設計的優(yōu)勢,將本文的一致性分組編隊控制算法與文獻[22]的方法進行對比,設置UAV的初始條件如表5所示,仿真結果如圖12所示。

表5 文獻[22]仿真初始條件
從文獻[22]方法的仿真結果可以看出,UAV集群能夠按照預定的期望分組形成多編隊,但各編隊到達穩(wěn)定狀態(tài)后,僅在編隊領導者的軌跡引導作用下飛行,編隊間缺乏組間協同,致使編隊隊形相對固定,無法完成隊形變換等任務。從圖7可以看出,本文設計的控制算法包含隊形參數組的反饋項,能夠在實現速度一致目標的同時,實現編隊之間的相互協同,更加符合現實需求。
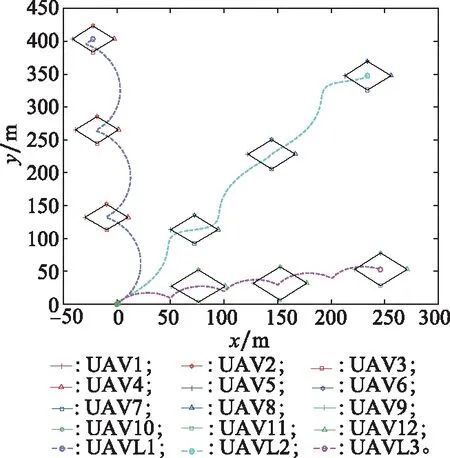
圖12 文獻[22]方法仿真結果Fig.12 Simulation result of the method in [22]
4.3 分組編隊目標跟蹤一體化控制仿真
為驗證集群對機動目標的跟蹤效果,設目標的初始位置為pt=(-50,50,0)m,目標的加速度為
隊形參數、控制增益等初始條件保持不變,跟蹤過程如圖13所示,跟蹤誤差如圖14所示。
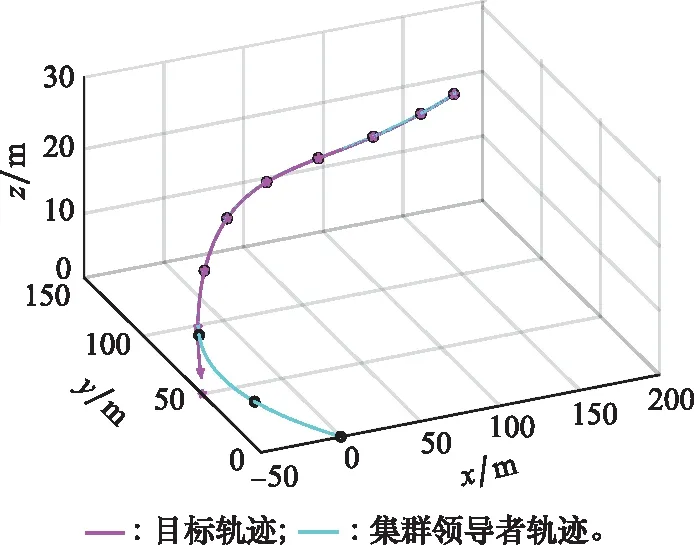
圖13 集群領導者跟蹤目標的虛擬軌跡Fig.13 Virtual trajectory of swarm leader tracking target
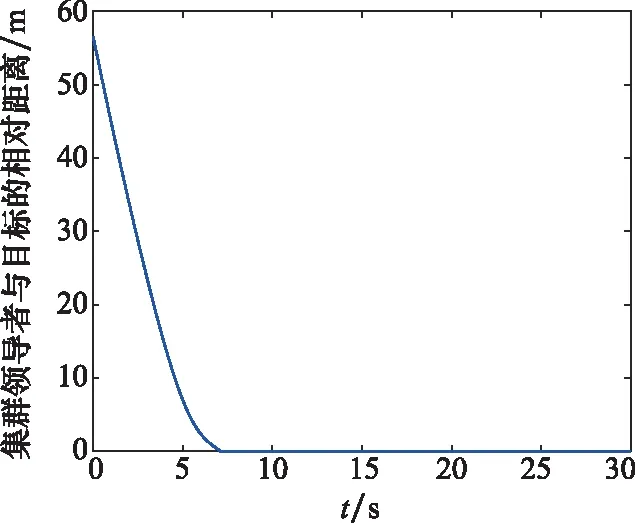
圖14 集群領導者與目標的相對距離Fig.14 Relative distance between swarm leader and target
從圖13和圖14可知,集群領導者實現了對機動目標的精確跟蹤,誤差在跟蹤策略的作用下收斂為零,表明跟蹤算法的設計符合控制要求;從圖15可以看出,整個系統(tǒng)在集群領導者和編隊領導者的雙重作用下,實現了對目標軌跡的有效跟蹤。通過仿真,直觀描述了集群領導者和編隊領導者分別對集群和編隊軌跡的引導作用。
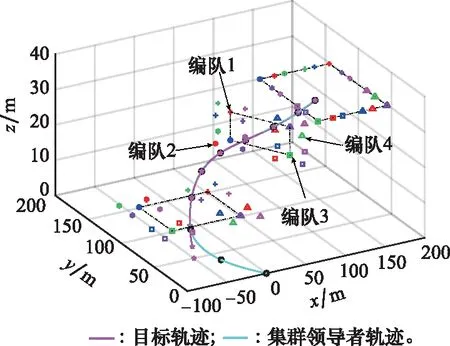
圖15 集群目標跟蹤軌跡Fig.15 Target tracking trajectory of swarm
5 結束語
本文針對UAV集群多編隊的協同控制問題,提出了一種滿足組間協同配合的UAV多編隊跟蹤控制一體化算法。在含Lipschitz非線性動力學項的UAV模型的基礎上,建立了具有雙虛擬結構的分層分組控制結構,并結合一致性理論設計了編隊控制律,實現了集群組內和組間隊形的協同變換;將頂層編隊的跟蹤任務細化為編隊控制、目標跟蹤的一體化控制方案;最后,通過仿真證實了控制律設計的有效性。在后續(xù)的研究工作中,將考慮多編隊在障礙環(huán)境以及多目標跟蹤等復雜任務背景下的協同控制問題。