
遙控操作返修機器人視覺系統焊縫圖像處理算法設計
2023-03-17 01:34:40吳闖劉金平馬明豪王象元王毅
金屬加工(熱加工) 2023年3期
吳闖,劉金平,馬明豪,王象元,王毅
核工業工程研究設計有限公司 北京 101300
1 序言
遙控操作焊接技術可以有效改善焊接環境,發揮機械臂可達性、穩定性好等方面優勢的同時,充分發揮人的高效決策能力以及高度學習能力,同時計算機對焊接過程中某些復雜場景信息的計算能力可以補足人在計算方面的薄弱點,使得人可以專心決策,而使機械臂作為決策執行者,因此遙控焊接對于惡劣焊接場景有很大的應用前景。
視覺傳感和遙控焊接過程的監控是實現遙控焊接的重要手端[1]。因此,本文設計視覺系統的方案,并根據視覺系統輔助條件下設計焊接遙控操作的控制策略及焊槍姿態優化方式,且實時監控焊接過程,并給操作員提供焊縫坡口特征信息,便于其決策并實時改變焊槍姿態,實現更好的遙控焊接質量。
2 圖像采集方法設計
視覺檢測傳感器內部集成了圖像采集系統和激光發射器,外部包括保護殼、濾光系統和防飛濺擋板,模型如圖1所示。
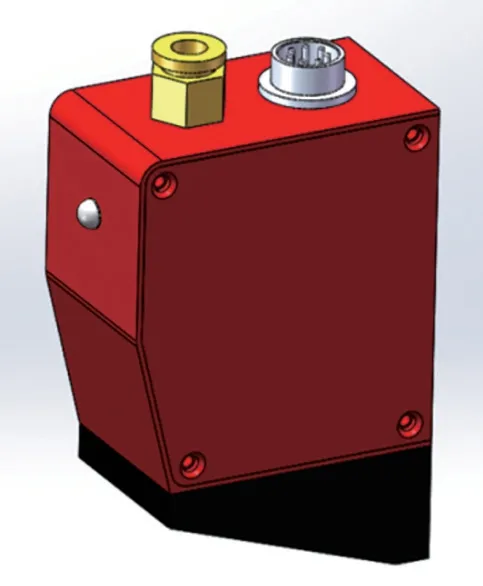
圖1 傳感器模型
本文選取能發射650nm的激光器,其具有較高的工作使用壽命,并配備激光功率適配器,可以更改激光的照射強度,激光照射在工件表面形成“一字形”的條紋,能夠較好地反應焊縫坡口形貌,如圖2所示。
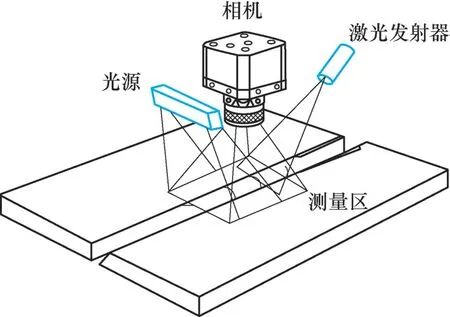
圖2 激光工作原理
由于工件對激光有反光等影響,對結構光提取增大了難度,故使用濾光片消除影響結構光提取的干擾因素,讓試驗能正常進行。
視覺傳感自適應控制系統在Python的基礎上結合OpenCV、Halcon等圖片處理軟件平臺進行試驗和調試。
圖像處理利用Opencv進行預處理,焊縫特征點提取使用Halcon進行連續不間斷的提取。
相機標定過程中使用Halcon得到相機參數,并進行精度檢驗,光平面使用Matlab進行數據處理和平面擬合,手眼標定用Matlab進行坐標系的轉換。PC機與機器人的通信利用Python中的UDP通信進行數據交換。
3 圖像處理三角測量算法設計
三角測量法是利用光線空間傳播過程中的光學反射規律和相似三角形原理,在接收透鏡的物空間與像空間構成相似關系,同時利用邊角關系計算出移動距離[2]。根據激光的入射角度不同可分為以下兩種情況。
(1)正入射 激光與工件表面垂直,正入射原理如圖3所示。激光正入射到參考平面M處、測量平面N處,并分別在CCD上的M'和N'處成像。
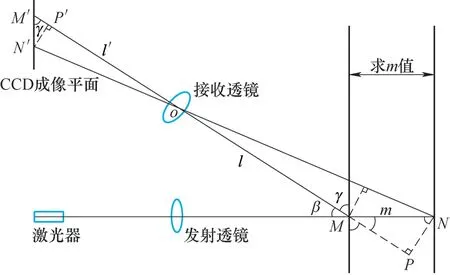
圖3 正入射原理
根據幾何光路可知,ΔOPN:ΔOP'N'得到式(1),即
由光路圖可知
聯立式(1)、(2)可得
進而即可求解得到m,在已知參考平面的情況下,通過m即可完成測距。
(2)斜入射 激光與工件表面夾角α>0,如圖4所示。

圖4 斜入射原理
由ΔOPN:ΔOP'N'得到式(4),即
解得m即可。
結構光三角測量法不用接觸工件,得到的距離就有較高的精度;可以測量的范圍較大,對待測表面要求低;結構簡單,性價比高。
4 圖像預處理
實際焊接過程中,要將得到的圖像灰度處理成只有黑白兩色狀態。利用OpenCV中Imread里的函數進行處理。
轉換之后的灰度圖像如圖5所示。由于焊接環境以及線結構光的發射,在線結構光的轉折部分存在干擾噪聲。這些噪聲與椒鹽噪聲類似,對目標特征的識別與檢測有很大影響。另外,線結構光條紋的邊緣呈鋸齒狀,但是起伏幅度較小。
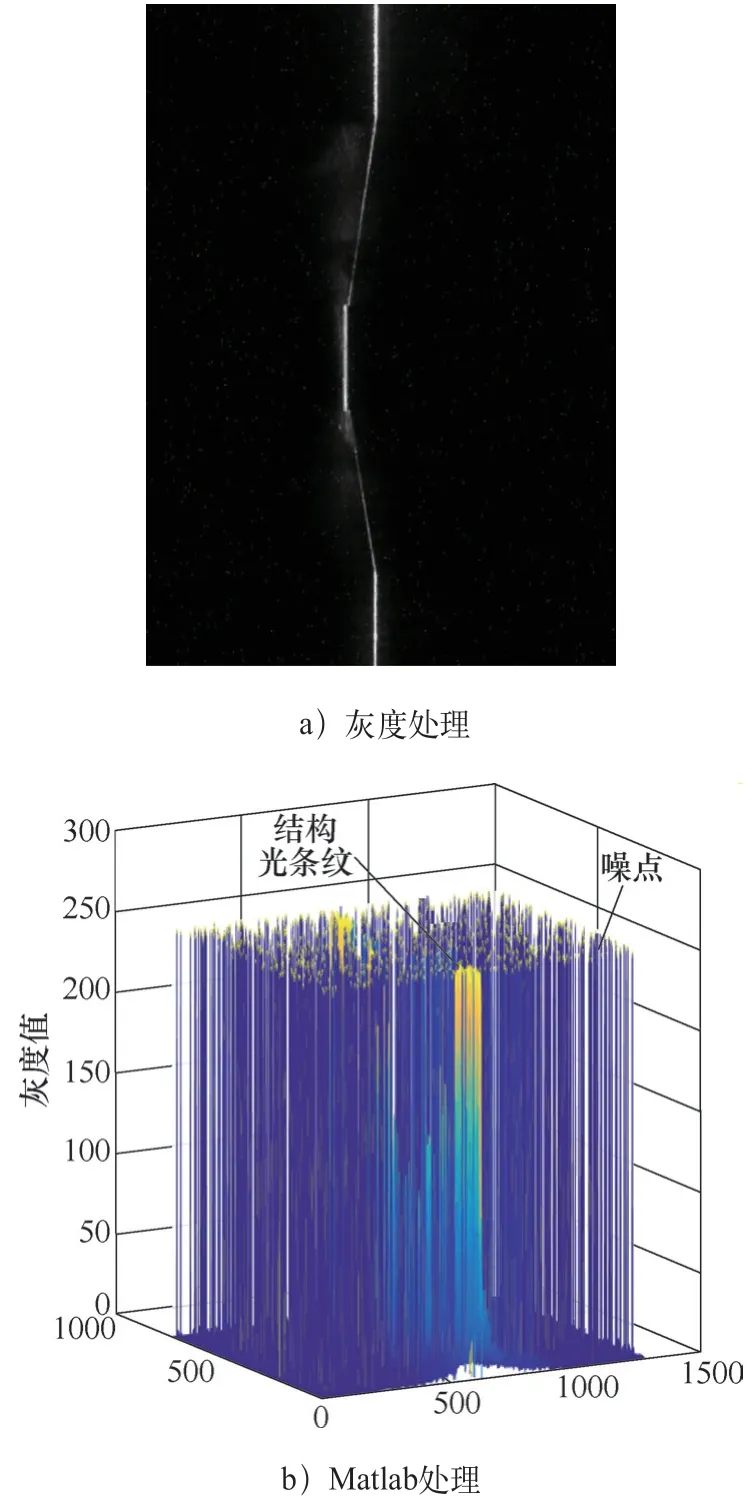
圖5 灰度圖像分析處理
利用Matlab對圖5a進行處理,可以直觀地看到圖中的噪點分布沒有規律,且噪點較多,如圖5b所示。
對圖像進行平滑處理,將影響圖片質量的噪聲去除[3]。根據濾波器的不同可分為以下三種。
(1)均值濾波 令Sxy表示中心在(x,y)點,尺寸為m×n的矩形坐標組,均值濾波的表達式為
利用OpenCV中的 Blur算法對圖像均值濾波。
(2)高斯濾波 高斯濾波原理是加權平均圖像中任意一個鄰域點內的像素值,確定該點的像素值。高斯濾波過程中所選模板內的值并非全部都是1,而是根據二維高斯分布函數來確定,之后利用改模板與圖像進行卷積計算。
二維高斯是構建高斯濾波的基礎,其概率分布函數式為
式中σ——二維高斯分布函數的標準差。
利用OpenCV中的 GaussianBlur算法對圖像進行處理。
(3)中值濾波 中值濾波是一種非線性濾波技術,其濾波思想與均值濾波過程中疊加求平均值的方式截然不同。在中值濾波過程中,所采用的是排序統計思想。原理是利用任意一點像素值周圍的灰度中值,來替換該點的灰度值。使用中值濾波對消除噪聲很合適。
利用OpenCV中的 MedianBlur 算法對圖像進行處理。
其中,中值濾波的效果受卷積核尺寸的大小Ksize影響,本文通過編歷卷積核大小為1、3、5、7,濾波效果如圖6所示。從圖6可看出,當卷積核為3時,圖片邊緣雖然保存有較好的效果,但是噪聲相對于卷積核為5時,效果略差一些,卷積核為7時,圖片邊緣細節較為模糊。
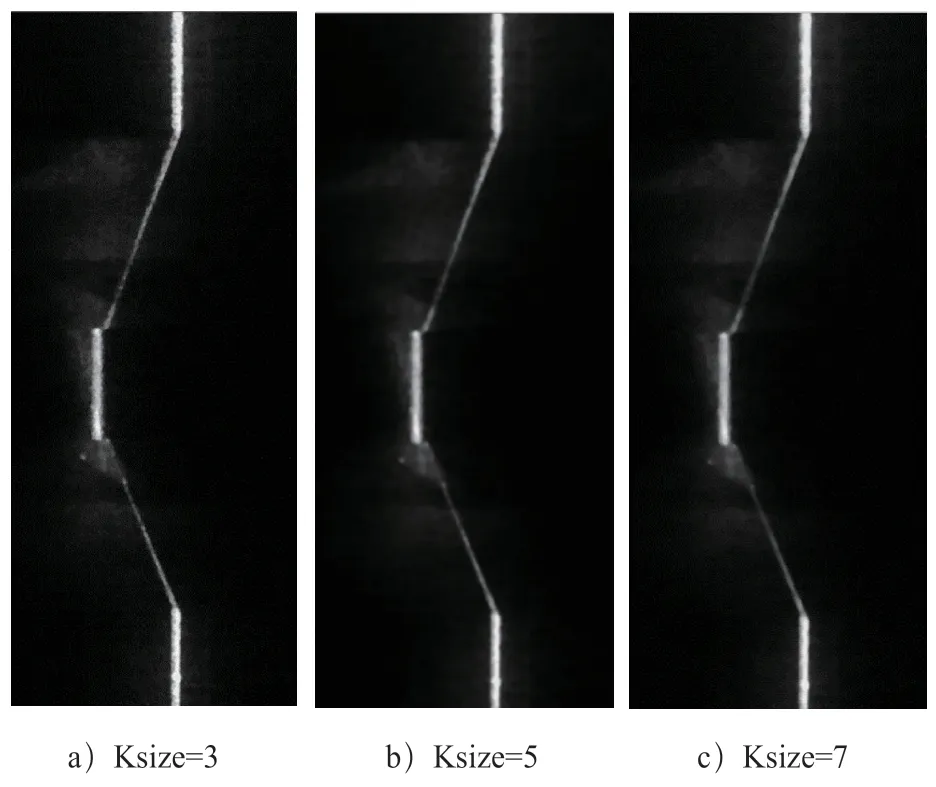
圖6 中值濾波效果
本文中為了得到更好的圖片邊緣效果以及減少噪聲的干擾,因此Ksize取值為5。
5 圖像二值化處理
二值化處理,又叫做黑白處理。為突出焊縫圖像中的特征,將結構光變為白色,其余地方變為黑色,呈現的圖像為黑白分明的圖像。
用OpenCV中的Threshold算法對中值濾波后的圖像進行二值化處理。分析得出,圖像二值化后,圖像黑白分明,結構光和背景處噪點數量明顯減小。
6 結構光的邊緣細化處理
邊緣檢測可以提取出目標區域與周圍像素不一樣的輪廓。本項目中,邊緣指的是線結構光在采集圖像中的邊緣。由于光的反射、散射等原因,線結構光在圖像中較為寬粗。邊緣檢測步驟為濾波、增強、檢測[4]。本文在初步檢測線結構光邊緣時,選用Canny檢測與Sobel檢測方法并對其結果進行比較分析。
(1)Sobel邊緣檢測 Sobel檢測算法為離散型差分算法,也稱為一階微分算法。主要運算思想是通過任意像素點鄰近的灰度值進行計算,得到該點的灰度值。圖像邊緣附近的灰度值變化幅度較大,呈階躍現象[5]。因此,利用計算得到的一階梯度值與閾值進行比較,確定其是否為邊緣。
(2)Canny邊緣檢測 結合最優思想,Canny檢測可使圖像中的實際邊緣檢測數量最大化。局部化檢測良好,檢測的點與實際邊緣線上的點距離較近,而且檢測到像素邊緣之間的距離最小。Canny邊緣檢測步驟如下。
1)噪聲去除:由于邊緣檢測很容易受到噪聲的影響,因此用中濾波去除噪聲。
2)計算圖像梯度:計算得到Gx和Gy,從而找到邊界的梯度和方向,即
3)抑制非極大值:在得到Gx和Gy之后,對圖像進行處理,如果掃描到的點在相同梯度上最大,則被判定為邊界點,從而篩除非邊緣像素點,僅留下邊緣檢測線。
4)滯后閾值:設置兩個閾值:minVal和maxVal。圖像的灰度值高于maxVal時判定為邊界,低于minVal1的則不是邊界。在兩個閾值中間,看取得的點與被判定為邊界的點是否相連,相連則為邊界點,反之則不是。
(3)差分圖像及骨架提取 將原圖像與區域連接生成的圖像差分運算,為差分圖像。在此基礎上再次進行灰度轉化與二值化,在此基礎上進行分析處理。從目標外圍到目標內圍,對目標不斷腐蝕,直到目標是單層像素寬度。該單層像素即目標的骨架。通過以上流程,達到細化線結構光邊緣的目的。細化線結構光優化流程如圖7所示。與原圖像進行比較可知,差分圖像中的線結構光清晰明亮。在像素層面上,線結構光線寬大幅度降低并且沒有斷裂現象,差分效果好。
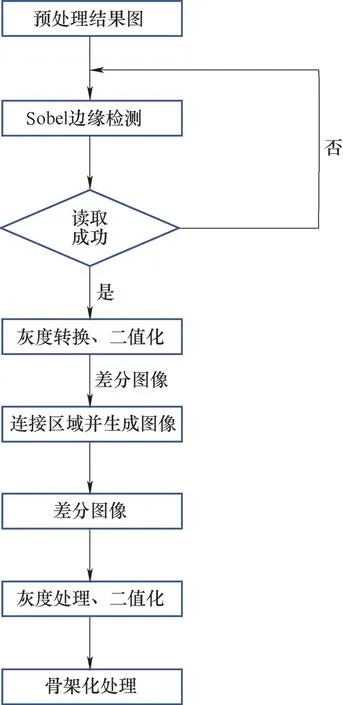
圖7 細化線結構光優化流程
(4)特征點提取 焊點即為焊縫與線結構光的交點。在提取邊緣后,通過對其腐蝕膨脹、直線擬合得到4條線結構光,進而轉換成4條結構光兩兩延長求交點的問題,從而求出焊點。
具體操作步驟如下:
1)首先對變間隙焊縫的視頻進行分幀處理,得到306張圖片,依次對其進行灰度處理。
2)自適應閾值控制,使其對所有的圖片都適用,對線結構光圖像進行二值化處理后再進行腐蝕膨脹處理。
3)利用Halcon中的特征檢測對線結構光進行特征區域選取,并對區域內圖像特征突出放大。
4)利用霍夫變換,對特征區域內的結構光進行直線擬合,利用Halcon中的fit_line_contour_xld算法可以延長擬合到的直線求交點。
7 遠端場景恢復算法
利用Halcon對視頻實時處理,得到連續的焊縫特征像素點,并以txt格式保存下來,經過后續的相機標定、激光平面標定和手眼標定,就可以把像素點在實際坐標系下的點計算出來,再對實際坐標下的點進行UG三維建模,三維模型如圖8所示。
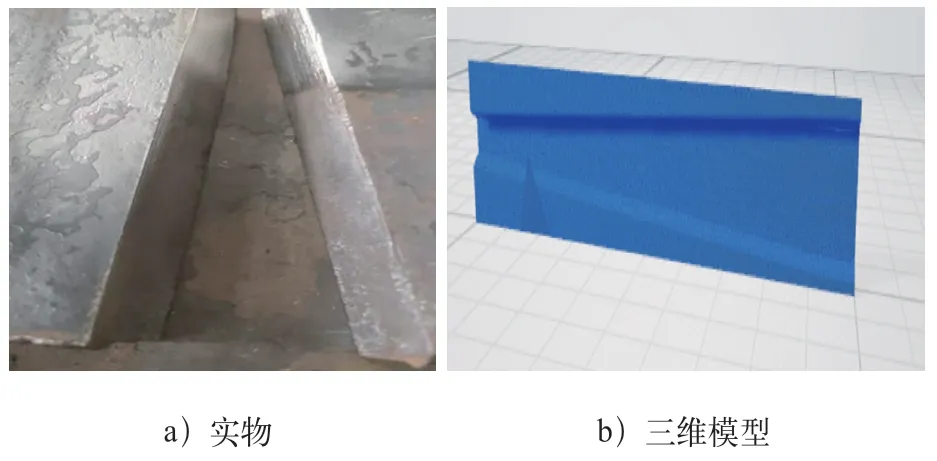
圖8 實物和三維模型
三維建模后,坡度寬度和深度的誤差均在0.02cm內,滿足精度要求。
8 結束語
本文研究的遙控操作返修機器人視覺系統焊縫圖像處理算法能夠準確識別焊縫并對待焊試件進行三維建模,方便遙控操作返修工作的順利開展。首先通過視覺檢測傳感器采集焊縫信息,并初步采用圖像處理三角測量算法進行計算;而后對圖像平滑處理,利用中值濾波將影響圖片質量的噪聲去除;通過圖像二值化處理、結構光的邊緣細化處理,利用遠端場景恢復算法形成待返修焊口三維模型。
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年6期)2021-06-09 05:57:08
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
中華詩詞(2019年7期)2019-11-25 01:43:04
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
制造業自動化(2017年2期)2017-03-20 14:26:13
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
