一種抑制控制力矩陀螺框架電機共模電壓的方法*
2023-03-22 01:35:54楊冬雷蔡樹文
飛控與探測 2023年5期
菅 宇,潘 蕊,王 潔,楊冬雷,蔡樹文
(上海航天控制技術研究所·上海·201109)
0 引 言
隨著航天技術的進步,航天器的種類日漸增多,功能越來越集成化,目前研制高精度、高穩定性、長壽命的大型航天器是一個必然的發展趨勢[1]。姿控系統作為航天器分系統中非常重要的一個子系統,是評判航天器性能的重要標準。姿控系統由姿態敏感器機構、執行機構以及控制機構組成。目前,大多采用控制力矩陀螺作為執行機構[2],它具有力矩放大能力,在同等質量和體積下可以提供比飛輪高一個數量級的控制力矩。
控制力矩陀螺主要由高速轉子系統、低速框架系統和基座組成,主要的運動部件有高速轉子系統和低速框架系統,通過大慣量轉子高速旋轉獲得角動量,框架轉動改變轉子系統的角動量矢量產生輸出力矩[3]。其中,永磁同步電機具有功率密度大、效率高、振動小等優點,一般作為控制力矩陀螺的低速框架部分。但是,依據永磁同步電機的機械結構,在正常運行過程中,電機的軸承與潤滑劑之間存在相互作用,這一部分可以被等效為一個電容,共模電壓通過的機械連接對這個等效電容進行充電,形成軸電流,對軸承造成侵蝕影響使用壽命,進而影響航天器的整體壽命[4-6]。
共模電壓抑制[7]主要有兩種途徑:一是基于硬件方面,通過增加濾波器或改進驅動器拓撲結構來實現;二是基于軟件方面,優化驅動器的控制算法來實現。文獻[8]中使用共模濾波器,抑制了系統中的共模傳導干擾,有效地降低了共模電壓對設備的影響,但是只對特定載波頻率生效。文獻[9-10]中提出了一種雙橋逆變器拓撲結構,兩組逆變器分別輸出極性相反的控制電壓,通過共模電壓對消實現抑制效果,但這種拓撲結構使用的開關器件數量加倍,電路成本及損耗翻倍,同時還存在兩組逆變器控制同步的問題。文獻[11]提出了AZSPWM算法,利用參考矢量所在扇區的兩個相鄰矢量和其中一個矢量的反相有效矢量來進行調制,但是會在輸出電壓中引入較多諧波分量。文獻[12]提出了NSPWM算法,這種算法使用三個相鄰的有效電壓矢量來進行調制,但是這種算法存在失效區域,僅在調制比m>0.770時有效。文獻[13]提出了一種RSPWM控制算法,使用三個相差120°的有效矢量進行控制,可將共模電壓保持為一固定數值,消除系統中的漏電流,但是母線利用率只有常規算法57.7%。
本文通過優化傳統驅動器的拓撲結構和常規的PWM控制算法,提出了一種基于三相四橋臂與優化的SVPWM調制算法結合的共模電壓抑制策略,這種共模電壓抑制策略,在調制過程中避免零矢量的使用,通過計算分析得到優化算法的開關狀態分布與作用時間,結合四橋臂的拓撲結構可以使系統處于平衡狀態,實現對共模電壓的有效抑制。
1 共模電壓產生機理
目前,一般使用兩電平電壓型驅動器來驅動永磁同步電機,在進行共模電壓產生機理分析時,可以從單相驅動器拓撲結構入手,之后將結果推廣至多相驅動器拓撲結構。
單相驅動器拓撲結構共有兩種輸出狀態:一種為差模狀態,如圖1所示;另一種為共模狀態,如圖2所示。
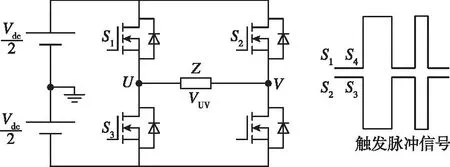
圖1 單相逆變器的差模輸出狀態Fig.1 The differential-mode output state of single-phase inverter
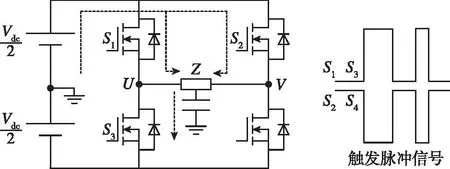
圖2 單相逆變器的共模輸出狀態Fig.2 The common-mode output state of single-phase inverter
當功率器件S1與S4或S2與S3同時開通時,驅動器處于差模輸出狀態,負載兩端的電壓UUV與母線電壓Vdc相同;當功率器件S1與S2或S3與S4同時開通時,驅動器處于共模輸出狀態,負載兩端的電壓UUV為零。在單相驅動器中,共模電壓的定義為:各橋臂輸出的中點與地之間的電壓差,如式(1)所示。
(1)
式中,Vcom為系統的共模電壓,VU,VV分別為U,V點的電壓。
將單相驅動器的共模電壓定義推廣至多相驅動器,圖3所示為常規多相驅動器的基礎拓撲結構。在圖3中,O為驅動器直流側電壓的中點,一般情況下將該點設置為零電位點,N為負載的中性點,A,B,C,…,M為驅動器各橋臂輸出的中點,vMN為M相橋臂輸出的相電壓,vAO,vBO,vCO,…,vMO為驅動器各橋臂輸出中點與直流側電壓中點O之間的電壓差,ia,ib,ic,…,im為各橋臂的相電流。因此可以得到多相驅動器的共模電壓Vcom為驅動器直流側電壓中點與電機繞組的中性點的電壓差。
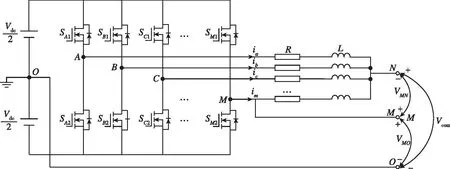
圖3 多相逆變器的一般拓撲結構圖Fig.3 The general topology of the multiple-phase inverter
多相驅動器各橋臂的相電壓存在如式(2)所示的電壓關系
(2)
將式(2)中的各式相加,可以得到
mvNO=vAO+vBO+…+vMO-R(ia+ib+…+
(3)
在使用Y形繞組結構的電機中,各相相電流的關系如式(4)所示
ia+ib+ic+…+im=0
(4)
將式(4)代入式(3)中,可以得到對于一般多相驅動器的共模電壓Vcom的表達式為
(5)
由式(5)可知,兩電平驅動器的共模電壓Vcom為直流側電壓的中點與各橋臂的輸出中點之間電壓差的平均值。當各相相電壓處于對稱狀態時,驅動器的共模電壓為零。永磁同步電機控制系統中,驅動器一般使用SVPWM調制算法。在這種調制算法下,各相相電壓為幅值相同、寬度不同的電壓脈沖,運行過程中電壓脈沖不會始終維持在對稱狀態,會在系統中引入共模電壓。電壓脈沖由各橋臂的開關狀態所決定,所以可以將系統的共模電壓Vcom用各橋臂的開關狀態表示。用Si來表示驅動器第i相橋臂的開關狀態,其中i=A,B,C,…,M。當上橋臂開通下橋臂關斷時,Si=1,此時第i相橋臂對直流側中點的輸出電壓為+Vdc/2;當上橋臂關斷下橋臂開通時,Si=0,此時第i相橋臂對直流側中點的輸出電壓為-Vdc/2。
所以,對于多相驅動器來說,共模電壓Vcom的表達式可以進一步表示為
(6)
圖4所示為三相三橋臂驅動器的拓撲結構,由式(6)可知,三相三橋臂驅動器的共模電壓可以表示為

圖4 三相三橋臂驅動器的拓撲結構圖Fig.4 The topology of the three-phase three-bridge inverter
(7)
由式(7)可知,三橋臂驅動器在任意時刻的輸出相電壓均不滿足對稱條件,共模電壓會在±Vdc/6和±Vdc/2之間波動,這樣的共模電壓使用傳統的濾波器很難消除,為了消除電路不對稱的工作狀況,需要對驅動器的拓撲結構進行優化。
在本文中,選擇采用三相四橋臂驅動器的拓撲結構來抑制系統的共模電壓,拓撲結構如圖5所示。只要保證四橋臂驅動器中任意時刻都有兩個上橋臂的開關器件導通,兩個下橋臂的開關器件導通,就可以使各橋臂輸出的相電壓保持對稱狀態,消除系統中的共模電壓。
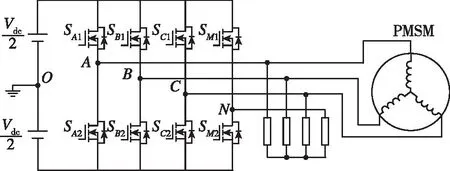
圖5 三相四橋臂驅動器的拓撲結構圖Fig.5 The topology of the three-phase four-bridge inverter
2 優化的SVPWM算法的共模電壓抑制方法
在常規的SVPWM調制算法中,載波是頻率與開關頻率相同的三角波,基波為三相對稱的正弦波,比較過程中,只要在載波的峰值附近,就會出現三相電壓同時為+Vdc/2或-Vdc/2的情況,即零狀態。在零狀態出現的時刻,無論如何控制第四橋臂,都不會使系統處于對稱狀態。
四橋臂驅動器的拓撲結構中,新增的第四橋臂需要通過三維的空間矢量重新規劃各扇區的矢量。首先需要根據式(8)將系統由a-b-c坐標系轉化到α-β-γ坐標系下
Xαβ0=Tabc/αβ0Xabc
(8)
式中,
經過坐標變換之后,可以得到四橋臂驅動器的電壓矢量分布圖,如圖6所示,共有16個空間電壓矢量,其中14個為有效電壓矢量,2個為零矢量。
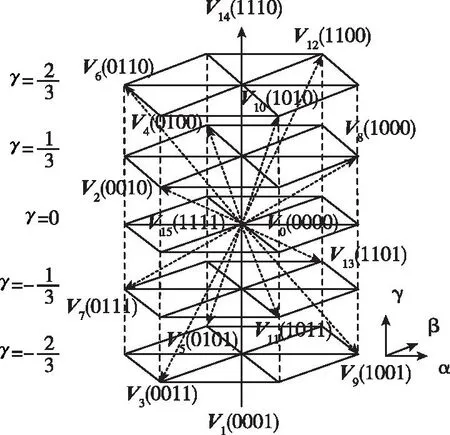
圖6 三相四橋臂的電壓矢量分布圖Fig.6 The voltage vector distribution diagram of the three-phase four-bridge inverter
為了消除系統的共模電壓,需滿足任意時刻都有兩個上橋臂開通,兩個下橋臂開通,第四個橋臂的狀態可以依據前三橋臂的開關狀態確定。在這種情況下,能實現消除共模電壓的只有γ=±2/3時兩個平面上的六個有效矢量。這六個有效矢量γ的模是固定值,所以可以將三維的開關矢量圖轉化為平面的矢量圖,如圖7所示。
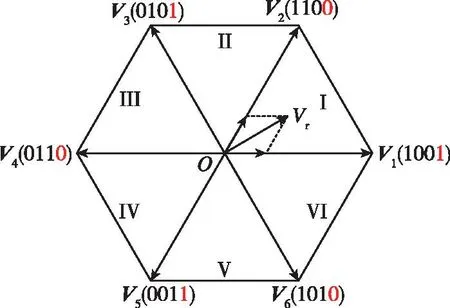
圖7 三相四橋臂的有效電壓矢量分布圖Fig.7 The effective voltage vector distribution diagram of the three-phase four-bridge inverter
每個電壓矢量所對應的開關狀態與常規SVPWM調制算法中的開關狀態相同,只是增加了對第四橋臂的控制。當前三橋臂的開關狀態確定后,第四橋臂的開關狀態也被確定,其控制信號可由式(9)得出
(9)
在常規的SVPWM調制算法中,由于零矢量的存在,即使在驅動器拓撲中加入了第四橋臂,系統的共模電壓依然會在±Vdc/4之間波動。為了使驅動器始終處于對稱狀態,需要避免零矢量的使用。在本文中,采用與有效矢量Vr相鄰的兩個大小相同、方向相反的有效矢量來代替零矢量,即在一個開關周期中使用4個有效矢量進行調制。以參考矢量Vr位于第I扇區為例,有效矢量選擇用V1和V2,再選擇與之相鄰的兩個矢量V3和V6來代替零矢量,實現對常規SVPWM調制算法的優化。
由于使用了4個有效矢量來進行調制,需要重新分配各扇區內有效電壓矢量的順序及作用時間。以參考矢量Vr位于第I扇區為例,選用V1,V2,V3和V6這4個有效矢量進行控制,設T1,T2,T3和T6分別為電壓矢量V1,V2,V3和V6的作用時間,在一個開關周期Ts內滿足如下關系
T1V1+T2V2+T3V3+T6V6=TsVr
(10)
T1+T2+T3+T6=Ts
(11)
式(10)為α-β-γ坐標系下的方程,展開后可以得到
(12)
式中,
將上述結果代入式(11),可得
(13)
式中,θ為參考矢量Vr與有效矢量V1的夾角。
求解后可以得到
(14)
在實際的應用過程中,時間T1,T2,T3和T6均必須滿足大于零的約束條件,可以得到調制比m
(15)
在實際的應用過程中,為了使式(14)在任意的θ均成立,可以得到算法的調制比m≤1。從理論上來說,優化的SVPWM算法雖然可以實現對共模電壓的抑制,但是母線電壓的利用率下降,同時器件的開關損耗也會增加。
在優化的SVPWM調制算法中,是通過兩個大小相同、方向相反的矢量來代替零矢量作用,因此這兩個矢量的作用時間相同,即T1=T6。在實際應用中為簡化運算,可以利用式(14)得到有效矢量的時間T2和T3,之后與開關周期做差來求得替代矢量的作用時間。圖8所示為在第I扇區內,各橋臂的開關切換狀態與時間分配情況。
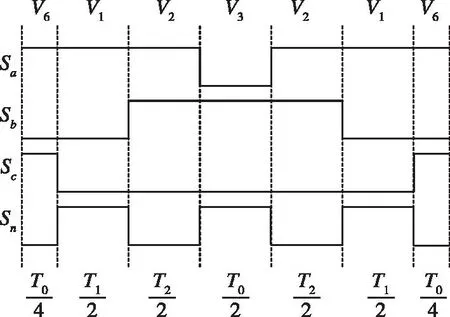
圖8 第I扇區開關狀態Fig.8 The switch status of the Sector I
3 仿真試驗及結果分析
在仿真驗證過程中,分別搭建三橋臂驅動器與四橋臂驅動器。設置直流母線的電壓Vdc為30V,功率模塊的開關頻率為20kHz,使用常規的SVPWM調制算法分別驅動三橋臂驅動器和四橋臂驅動器,可以得到仿真波形如圖9和圖10所示。
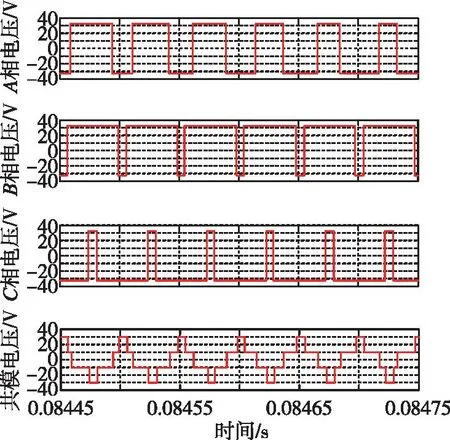
圖9 使用常規的SVPWM調制算法的三橋臂逆變器電壓波形與共模電壓波形Fig.9 The phase voltage and common mode voltage of the conventional SVPWM algorithm and three-bridge inverter
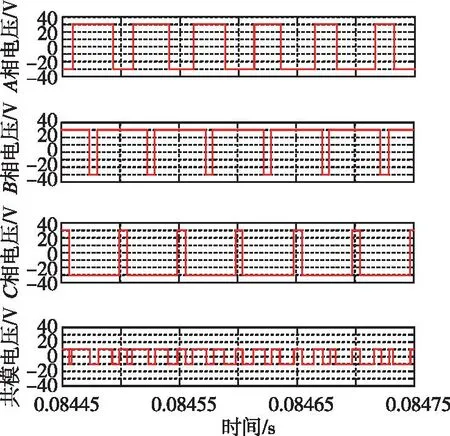
圖10 使用優化的SVPWM調制算法的三橋臂逆變器電壓波形與共模電壓波形Fig.10 The phase voltage and common mode voltage of the improved SVPWM algorithm and three-bridge inverter
從圖9和圖10中可以看出,采用常規的SVPWM調制算法時,三橋臂驅動器的共模電壓在±Vdc/2之間波動,四橋臂驅動器的共模電壓在±Vdc/4之間波動。由此可見,四橋臂驅動器對共模電壓有一定的抑制效果,但是調制算法使用了零矢量,無論第四橋臂如何調節都不能完全抵消不對稱狀態,因此還需要對調制算法進行優化。
使用改進的SVPWM調制算法分別驅動三橋臂驅動器和四橋臂驅動器,可以得到如圖11和12所示的仿真波形。
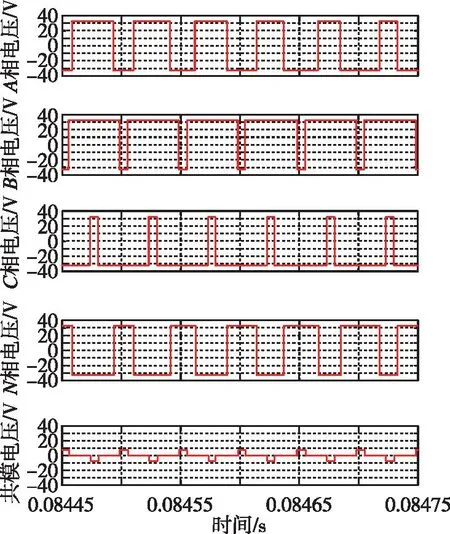
圖11 使用常規的SVPWM調制算法的四橋臂逆變器電壓波形與共模電壓波形Fig.11 The phase voltage and common mode voltage of the conventional SVPWM algorithm and four-bridge inverter
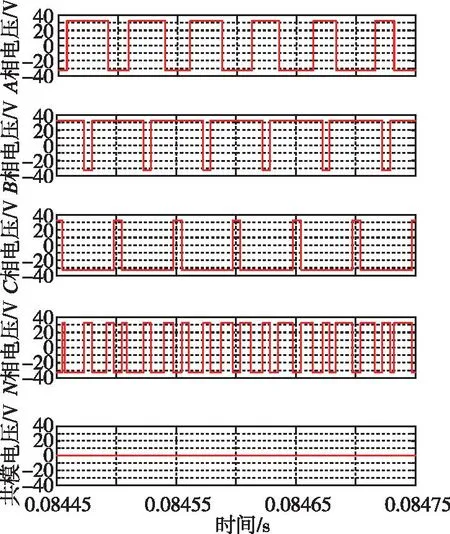
圖12 使用優化的SVPWM調制算法的四橋臂逆變器電壓波形與共模電壓波形Fig.12 The phase voltage and common mode voltage of the improved SVPWM algorithm and four-bridge inverter
通過圖11和圖12,采用改進SVPWM調制算法后,避免了零矢量的使用,三橋臂驅動器的共模電壓在±Vdc/6之間波動;四橋臂驅動器在任意時刻均有兩個上橋臂導通,兩個下橋臂導通,系統始終保持在平衡的狀態,共模電壓為零。由此可見,將兩種共模電壓抑制的方法結合可以有效地抑制系統中的共模電壓。
4 結 論
本文分析了單相逆變器的共模電壓產生機理,并將結果推廣到多相逆變器,提出了一種基于三相四橋臂驅動器拓撲結構與優化的SVPWM調制算法結合的共模電壓抑制策略,通過計算分析得到優化算法的開關狀態分布與作用時間,最后通過仿真試驗結果分析可知:三相三橋臂驅動器中,優化算法的共模電壓雖然小于常規調制算法,但是由于拓撲結構的限制,系統中不存在平衡狀態,共模電壓始終存在;三相四橋臂驅動器中,常規調制算法由于零矢量的使用,如何控制第四橋臂都不能使系統處于平衡狀態,如不考慮死區時間的影響,優化的調制算法可以使系統時刻處于平衡狀態,共模電壓為零。
