MEMS陀螺雙通道數字接口系統設計*
2023-03-22 01:35:56吳奕銘譚永海綦聲波
飛控與探測 2023年5期
吳奕銘,譚永海,張 欣,綦聲波,李 崇
(中國海洋大學 自動化及測控系·青島·236000)
0 引 言
微機電系統(Micro-Electro-Mechanical Systems,MEMS)陀螺儀作為一種測量外部旋轉角速率的傳感器,自投入市場以來就憑借著其自身相較于傳統陀螺儀的體積小、功耗低、成本低的獨特優勢[1-4],被廣泛應用于水下設備[5]、無人駕駛汽車[6]、智能機器人與無人機系統等領域[7-8]。但是,如何進一步推動MEMS陀螺邁向可靠產品級的應用,一直是業內公認的難點所在[9]。
近年來,關于MEMS陀螺各個領域的研究應用也越來越多[10]。2021年,姜波等[11]設計了一種內嵌梳齒電容的全對稱八質量MEMS陀螺,有希望成為下一代高性能的快速響應陀螺;2022年張志勇等[12]設計了一種高抗振的雙質量塊MEMS陀螺,通過優化敏感結構大大提高了該型號陀螺的測量精度;2020年,哈爾濱工業大學團隊設計了高性能低通ADC數模混合芯片用以開發一種新型的接口電路方案[13];2021年,中國科學院微電子所的范藝暉等[14]采用了Verilog-A硬件語言建立MEMS陀螺儀的接口電路模型并進行了行為級仿真和實驗驗證;同年,國外的TDK公司發表了MEMS陀螺與專用接口芯片封裝一體的設計方案,極大提升了陀螺的零偏穩定性[15]。
目前,許多研究工作主要集中在MEMS陀螺本身的結構設計與配套的接口電路上[16],但隨著MEMS陀螺本身性能的不斷提高,傳統的單通道測試系統局限于自身的接口系統設計,往往只能費時費力地對高性能MEMS陀螺管芯逐一測試,這樣效率相對低下的做法已經逐步落后于MEMS陀螺整體產業高效率化的發展趨勢,也成為當前MEMS陀螺測控領域的一大痛點。因此,MEMS陀螺整體產業化、快速化發展帶來的對批量化測試迫切需求與現有單陀螺接口系統測控效率相對低下之間的矛盾逐漸顯現出來,業界急需對多通道接口系統展開研究與落地工作以滿足上述產業化需求。
針對上述需求,本文提出了一種新型雙通道MEMS陀螺接口電路來滿足多個陀螺的實時測控工作的需求。本文工作主要分為三部分,包括對MEMS陀螺基本運行原理進行分析,設計新型的雙通道接口電路以及與之配套的FPGA+ARM端數字系統架構。經測試結果表明,本套接口系統能夠實現在同樣環境下對同一批次兩個陀螺進行相互獨立的測控工作,為后續MEMS陀螺的產業化測控打下了堅實的基礎。
1 MEMS陀螺雙通道測試原理
MEMS諧振陀螺的工作原理是基于科里奧利力來實現的,理想陀螺的模型如圖1所示,其動力學模型則為
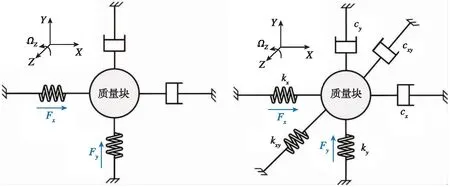
圖1 MEMS陀螺儀物理模型Fig.1 Physical model of MEMS gyroscope
(1)
設X模態為驅動模態,Y模態作為敏感模態,考慮如圖1左圖中非理想條件下不可避免地存在著模態耦合,此時求得的敏感模態穩態解為


(2)
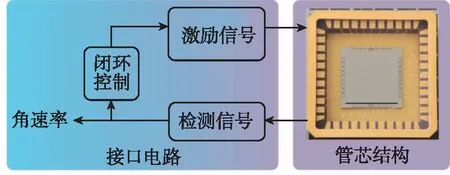
圖2 單個陀螺接口電路結構示意圖Fig.2 Schematic diagram of a single gyro interface circuit
在陀螺實際測試工作中,MEMS陀螺不可能完全處于理想環境,且其測控調試過程一般極為費時費力,以上文提到的PLL與AGC為例:對PLL來說,首先要進行大范圍的掃頻工作來找到陀螺兩個模態的諧振頻率,接著要不斷地重復掃頻以找到精準的頻率值,一般要求在0.01Hz以內,最后還要求在數字系統中設計控制算法以產生該頻率的激勵信號來對陀螺諧振子進行持續激勵,使其一直保持在輸出幅值最大、檢測敏感度最高的共振狀態;而對AGC而言,其復雜之處在于要求陀螺兩個模態反復交換來開啟該控制環路,以確定AGC的最佳工作方式;除此之外,PLL與AGC兩者的控制環路都需要調整各自的PID 參數,來盡量縮小各自的控制環路誤差以提高控制精度,但參數調整這類工作,一般都需要經驗豐富的專業人員耗費大量時間精力來完成。因此,單個陀螺的測控工作正常情況下是非常消耗時間和人力的,若能同時對兩個陀螺進行獨立測控,那無疑是提高了一倍的效率,也對推動MEMS測控行業發展極為有利。
伴隨著國內MEMS產線的井噴式發展,對MEMS陀螺測控工作的效率提出了更高的要求。每次僅能對單個陀螺進行測控的MEMS陀螺接口系統已經不能滿足科研團隊、MEMS生產制造商對大批量高效率測控標定的需求。同時,現有的單陀螺測控系統中也存在著大量的資源冗余,并未對其進行更充分的利用。為了進一步利用系統內冗余資源,提高對MEMS陀螺的批量化測控標定效率,本文提出了如圖3所示的數字式MEMS陀螺雙通道接口系統。系統電路總體架構可分為五個部分,分別為前端模擬電路(紫色部分)、數字/模擬轉換電路(綠色部分)、后端數字系統(藍色部分)、人機交互終端(黃色部分)與系統供電電路(紅色部分)。
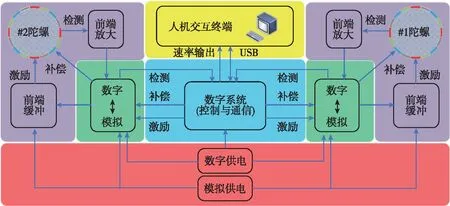
圖3 MEMS陀螺雙通道接口系統總體架構圖Fig.3 Overall architecture diagram of MEMS gyro dual channel interface system
2 模擬電路與數字系統設計
2.1 前端模擬電路設計
2.1.1 前端激勵信號電路
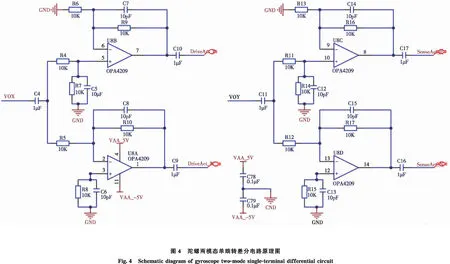
由于本文使用的是雙路激勵信號,而且采用了差分驅動方式以獲得更高的驅動效率和抑制共模干擾效果,但數模轉換(Digital to Analog Conversion,DAC)通常為單端輸出,所以設計了如圖4所示的單位增益單轉雙電路。圖4為1號陀螺的單轉雙電路,總體分為三部分,以X模態電路為例,其為一個分壓同相單位增益放大器與一個反向單位增益放大器組成。圖4中取隔直電容C17=1μF,其余阻容大小均為R=10kΩ,C=10pF,此時可以得到其截止頻率為
(3)
輸出電壓則分別為
V+=
15.9Hz?fV?1.59MHz
V-=
15.9Hz?fV?1.59MHz
(4)
其中,增加電容C是為了增加相位裕度補償,從而減少實際高頻自激狀況的發生;電路運放部分則選用的是OPA4209四通道運放來進行陀螺兩個模態的單端轉差分信號生成。
2.1.2 前端激振緩沖電路
考慮到陀螺表頭是容性負載,因此要求施加在陀螺電極上的激勵信號需具有一定的帶負載能力。所以本套系統采用的激勵信號,并不是由DAC產生后直接輸入給陀螺,而是經過了一級緩沖電路之后才輸入至陀螺對應的激勵電極。因此,單位增益帶寬(Unity-Gain Bandwidth,UGB)模塊的作用僅僅是起到對激勵信號緩沖的作用,并不需要對信號進行放大,選擇放大器時應更看重其帶寬指標;而且要對陀螺的兩個振動模態進行激勵,所以必須要對兩路信號同時進行緩沖處理,放大器也需優先考慮雙通道產品。
基于上述原因,本文選擇了雙通道且低成本的AD8058型號放大器,該型號放大器有很強的容性負載驅動能力,能提供325MHz的-3dB帶寬,可完全滿足陀螺激勵信號的需求。UGB部分電路設計如圖5所示,由DAC輸入的交流激勵電壓信號,分別進入IN1+和IN2+,經單位增益緩沖后通過OUT1和OUT2輸出。
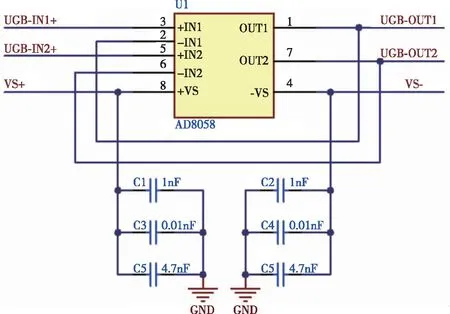
圖5 雙通道前端激振緩沖電路圖Fig.5 Two-channel front-end shock buffering circuit diagram
2.1.3 前端跨阻放大電路
由于陀螺檢測電極輸出的電流信號幅值非常微弱,在傳輸過程中極易收到其他強信號的干擾,使用跨阻放大器(Trans-Impedance Amplifier,TIA)則可以放大該電流信號并將其輸出轉化為電壓信號,便于后續信號轉換與處工作。本套系統選用了場效應管輸入型放大器AD8066,其優點在于可以提供高達145MHZ的-3dB帶寬以及180V/μs的壓擺率,對于10kHz或者1MHz的放大需求而言完全足夠。
驅動模態和敏感模態的TIA電路結構設計分別如圖6和圖7所示,其中兩個模態差分輸出共計四路信號,均為相同結構;現在以驅動模態正向檢測信號P通道為例,R19與C19為反饋阻容,令其數值分別為R和C,則該電路結構的傳遞函數可寫為
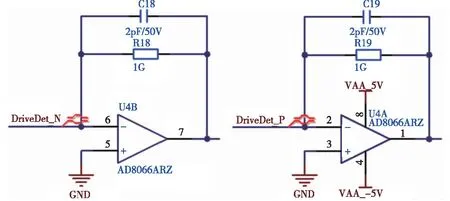
圖6 驅動模態雙通道TIA電路Fig.6 Drive modal dual channel TIA circuit
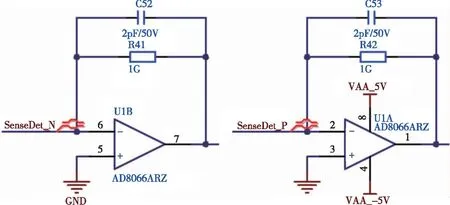
圖7 檢測模態雙通道TIA電路Fig.7 Detect modal dual channel TIA circuit
(5)
對于電流來說,該系統表現出一個低通特性,為了降低電路內噪聲以及提高放大增益效率,本文選用了1GΩ的反饋電阻和2pF的反饋電容。
2.2 數字系統設計
數字系統總體架構總體分為兩部分,可編程邏輯(Programmable Logic,PL)端采用FPGA來實現各種模塊設計,可編程系統(Programming System,PS)端則是利用ARM完成對多個陀螺的基帶信號的控制閉環與通信協議部分。
2.2.1 FPGA高速算法設計
本文設計的雙通道接口系統的PL端,主要包含了以下相關模塊:首先是數控振蕩器NCO,其在FPGA端由頻率字累加器、CORDIC模塊、乘法調幅模塊和DAC SPI接口模塊組成,用來產生頻率可變的正/余弦波,從而作為激勵信號;然后是數字轉模擬信號采用的DAC80502,其數字信號的SPI通信接口模塊也是在FPGA上進行設計的;高壓DAC選用的是DAC81404,其作用是輸出8路正負20V高壓信號用于供給兩只陀螺的頻率調諧,其模擬端口直接作用在陀螺表頭,數字端復用了上述的SPI接口;接下來是陀螺的檢測信號解析部分,ADC選用ADS8354,將采樣到的檢測信號數字化便于后續處理,并采用相干解調來得到其中的幅度信息,為保證相干解調的精確度,基于上文NCO的設計,將其生成的激勵信號作為相干解調的參考信號,保證其同源度一致,最大限度地抑制頻差項的出現;之后是對解調信號進行混頻濾波,混頻器復用上述乘法器設計,而濾波器則采用了級聯積分梳狀(Cascaded Integrator-Comb,CIC)濾波器與有限沖激響應(Finite Impulse Response )濾波器的組合形式進行抗混疊降采樣,可以將采樣率從ADC的250KHZ降至1KHZ,截止頻率則低至100HZ,從而滿足后續控制需求;最后采用坐標旋轉數字計算方法(Coordinate Rotation Digital Computer,CORDIC)的向量模式來計算陀螺的幅值(Amplitude,AMP)與相位θ,方便后續的環路控制。FPGA整體模塊設計如圖8所示。
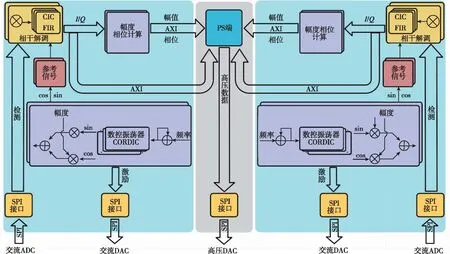
圖8 FPGA端相關模塊設計原理圖Fig.8 FPGA terminal related module design schematic diagram
2.2.2 ARM端控制閉環與通信
本文設計的雙通道接口系統的PS端,總體架構如圖9所示,主要包含了以下相關模塊:首先是全局初始化模塊,用于初始化PL側所有的AXI-GPIO模塊;定時器模塊,用于初始化1ms定時器并用作前后臺調度框架的時鐘源;SPI通信模塊,用于實現PC上位機與PS之間的數據/指令通信;任務調度模塊,包含了通信協議任務與兩個陀螺的全部頂層業務。其中每個陀螺的任務又包含鎖相環任務、穩幅環任務、正交抑制任務和力平衡任務。
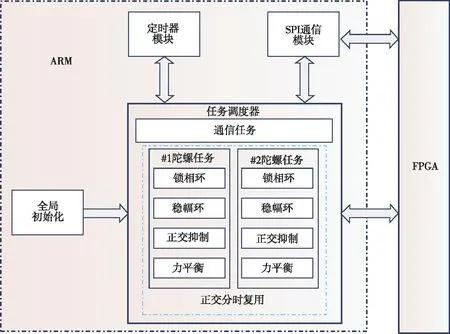
圖9 PS端程序模塊總體設計圖Fig.9 PS program module overall design drawing
為了保證系統具有最佳實時性能,程序框架設計上采用了經典的前后臺模式:前臺任務只有一個,為1ms定時器中斷;后臺任務為通信任務與陀螺任務。兩個陀螺的控制任務變量組相互獨立,并以正交分時復用方式運行。閉環任務均采用了經典的PID反饋控制方案,為保證系統的輸出無明顯跳變在具體實現過程中采用了增量式PID。
通信部分選擇四線SPI通信,并利用SPI的同步傳輸特性,將上行數據與下行指令合并到一起進行傳輸,減少了任務調用次數。在SPI總線中,PS端的主從關系為從設備,只需要向SPI緩沖區裝填數據,而不需要處理中斷,最大程度保證了系統的實時性與簡潔度,保證了控制環路的穩定性。
3 雙通道接口系統功能展示
本套雙通道接口系統調試終端為圖10所示的人機交互上位機。其中包含開環驅動、IQ信息、掃頻曲線、控制環路及數據保存等多個功能,前端界面整體設計如圖10所示。
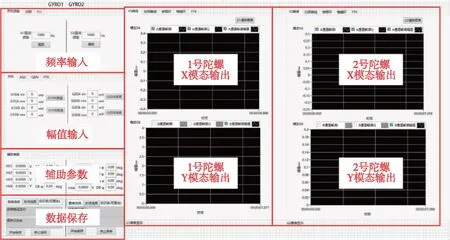
圖10 LabVIEW測試終端前端總界面設計Fig.10 LabVIEW test terminal front-end general interface design
3.1 雙通道雙工異步掃頻
在開環狀態下設置1號與2號兩個陀螺的掃頻范圍為6550~6660Hz,得到圖11的掃頻曲線,根據曲線可得到陀螺兩個模態各自的諧振頻率與對應峰值,且兩個模態間存在一定的頻差與耦合。根據掃頻步長的不同設置,可以得到不同的掃頻結果,繼而作為中心頻率來進行增量式的比例-積分(Proportional-Integral)計算。
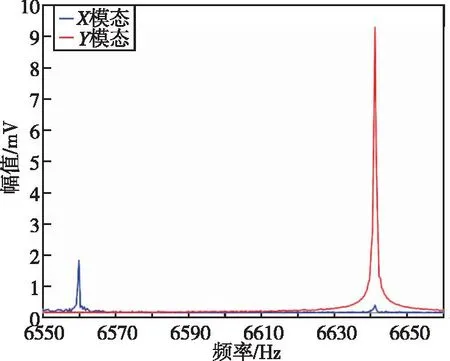
(a) 1號陀螺掃頻曲線
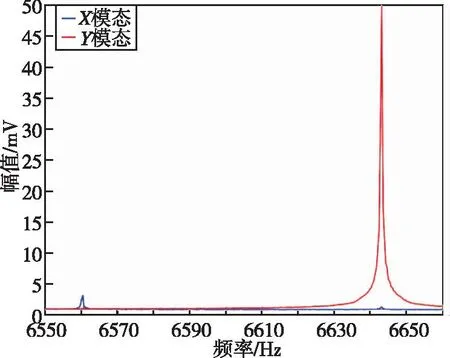
(b) 2號陀螺掃頻曲線圖11 雙工異步陀螺掃頻曲線圖Fig.11 Frequency sweep graph of duplex asynchronous gyro
3.2 雙通道雙工鎖相與穩幅
以兩個陀螺Y模態來測試器驅動環路的閉環特性,開啟PLL與AGC的閉環后,其測試結果如圖12所示。以1號陀螺為例,當其Y模態鎖相并穩幅后,其輸出頻率擺幅在(6559.66±50)mHz以內,其檢測到的幅值擺幅被控制在(267±0.5)mV以內。
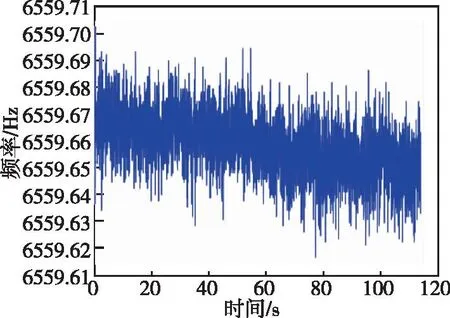
(a) 1號陀螺PLL輸出頻率
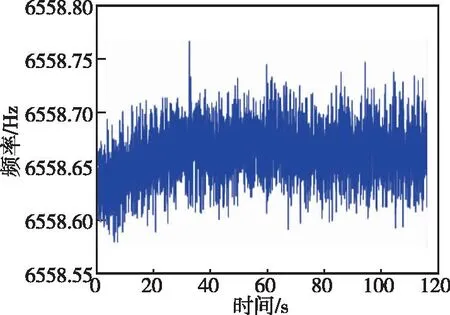
(b) 2號陀螺PLL輸出頻率
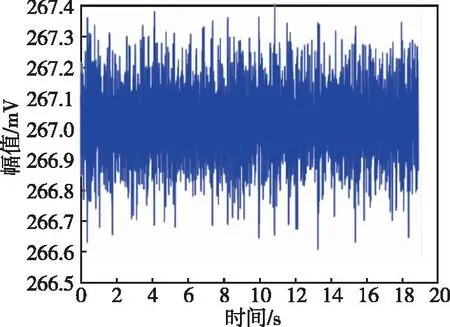
(c) 1號陀螺AGC穩定幅值
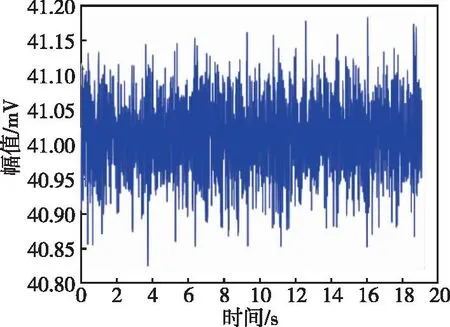
(d) 2號陀螺AGC穩定幅值圖12 雙陀螺驅動環路閉環測試結果圖Fig.12 Double gyro drive loop closed loop test results
3.3 雙通道陀螺線性度測試
進行陀螺線性度測試實驗時,將轉臺角速率設置為-5(°)/s至+5(°)/s(以順時針旋轉為正,逆時針旋轉為負),以每1(°)/s為測試間隔,在旋轉角速率穩定時,每個角速率停留10分鐘并記錄敏感模態同相分量穩定后的幅值。由圖13可知兩只陀螺的標度因數均在30mV/[(°)/s]以上,線性度經計算后則均保持在9.92×10-5% 以下,十分優異。
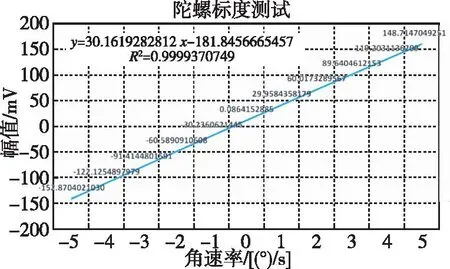
(a) 1號陀螺標度測試結果
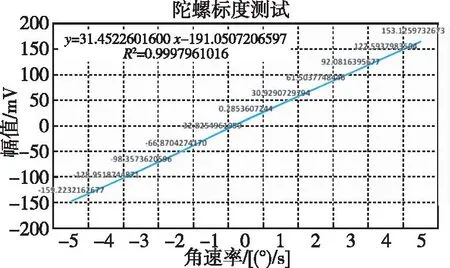
(b) 2號陀螺標度測試結果圖13 不同角速率下陀螺敏感模態幅值線性度測試結果Fig.13 Test results of amplitude linearity of gyro sensitive modes at different angular rates
3.4 雙通道陀螺艾倫方差
采用本文所提的雙通道系統以及鎖相放大器,分別記錄1號和2號陀螺在靜止狀態的輸出,二者設置相同的采樣速率與閉環參數,再分別對輸出數據進行Allan方差計算,兩個陀螺的零偏對比如圖14所示。根據測試結果可見,本文所提的雙通道系統相對于鎖相放大器,兩個陀螺測試時的零偏不穩定性均優于鎖相放大器0.1(°)/h。
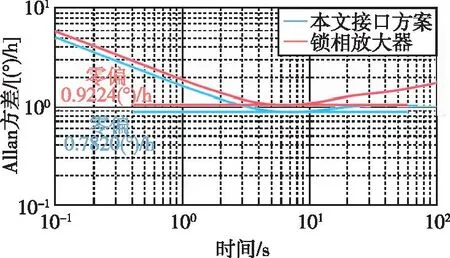
(a)
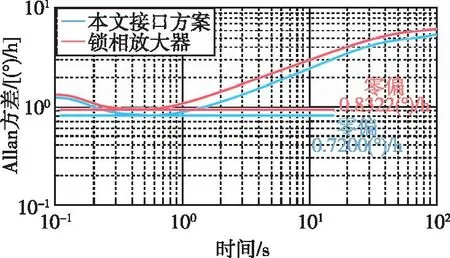
(b)圖14 雙通道系統與鎖相放大器零偏對比測試圖Fig.14 Zero-bias comparison test diagram of a two-channel system and a lock-in amplifier
4 結 論
本文首先分析了陀螺運行的基本原理,并根據陀螺接口系統需求提出了一套新的雙通道陀螺接口測控系統方案。最終實現的雙通道陀螺測控系統基本能夠實現同時對兩個通道陀螺進行測控標定,極大地提高了陀螺的測控效率,優化了陀螺接口電路的硬件需求,且設計的接口系統易于后續二次開發,為后續推廣陀螺的測控產業化,提供了一種有價值的方法。但本文所提出系統并未考慮MEMS陀螺自身的各種非線性因素,因此后續將研究非線性控制、多維度參數測控標定等問題,并將其逐步添加集成到雙通道接口系統中。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
