考慮平臺特性的多層建筑物內履帶式無人平臺運動規(guī)劃
2023-04-02 10:56:34熊光明于全富胡秀中周子杰許佳慧
兵工學報 2023年3期
關鍵詞:規(guī)劃
熊光明, 于全富, 胡秀中, 周子杰, 許佳慧
(北京理工大學 機械與車輛學院,北京 100081)
0 引言
在美國國防高級計劃研究局(DARPA)的SUBT挑戰(zhàn)賽[1]和我國的跨越險阻2021 地面無人系統挑戰(zhàn)賽[2]中,都首次要求無人平臺在多層建筑物內完成自主任務。不同于一般單層環(huán)境,多層建筑具有多個相互連接的離散平面的空間特征。雖然許多應用于單層連續(xù)平面環(huán)境的二維和三維運動規(guī)劃算法已經被提出,但是無人平臺在多個離散平面之間的運動規(guī)劃問題仍有待解決。
運動規(guī)劃算法一般分為2D、2.5D 和3D 共 3 種類型。2D 算法是在平面地圖上進行規(guī)劃的傳統方法。2.5D 算法在2D 算法的基礎上將3D 地圖映射到2D 平面上并進行規(guī)劃,考慮到更多環(huán)境信息的同時保證了算法的計算效率。Carsten 等[3]將3D 環(huán)境投影到平面進行柵格化,在每一個柵格上存儲一個地形對應的高度值,在全局規(guī)劃算法中融合障礙物的高度信息進行路徑規(guī)劃。Ishigami 等[4]將路徑長度、俯仰和側傾程度等4 項指標加權和作為Dijkstra 算法生成多條候選路徑,但是沒有考慮運動學約束。Lacroix 等[5]利用A*算法在搜索路徑時,采用圓弧路徑連接節(jié)點,得到相對平滑的路徑,但是無法保證路徑的曲率連續(xù)。Howard 等[6]利用運動學模型前向仿真生成基元路徑來進一步提高路徑的連續(xù)性。在單層連續(xù)平面環(huán)境下,2D 和2.5D 規(guī)劃算法可以減少計算的復雜度,并同時保證規(guī)劃結果具有一定的準確性。然而,2D 和2.5D規(guī)劃算法并不能直接應用在多層建筑物環(huán)境中。
相對于2D 和2.5D 算法,3D 規(guī)劃算法可以在單層連續(xù)曲面上進行規(guī)劃,但是由于實際三維環(huán)境的空間復雜性,難以應用在多層建筑物等大規(guī)模場景。Colas 等[7]和Menna 等[8]將室內環(huán)境使用三維柵格地圖建模,考慮到距離、坡度、凸起度作為代價值,最終在仿真環(huán)境下得到了樓梯處的一段可通行路徑。但是仿真環(huán)境只是一段樓梯區(qū)域,沒有包括各樓層環(huán)境信息,空間復雜度比較小。由于3D規(guī)劃算法的復雜度大于nlog(n),n為算法處理的節(jié)點數量,隨著地圖空間的增大,節(jié)點數量的增多會引起路徑搜索時間的非線性激增[9]。此外,三維規(guī)劃常用的地圖表示方式主要為多邊形網格化曲面和三維柵格地圖。多邊形網格化曲面要經過復雜的擬合重構步驟,難以用于大規(guī)模地圖,而三維柵格地圖需要對大量的稠密點云信息進行二次重構才能用于規(guī)劃。加之,3D 規(guī)劃算法本身的復雜度以及需要在整個路徑長度上進行三維碰撞檢測。因此,3D 規(guī)劃算法在多層建筑物環(huán)境中需要占用大量的計算資源,難以實際應用。
除此之外,對多層建筑物內運動規(guī)劃問題進行降維處理的方案也被提出。Zhang 等[10]和Baltashov 等[11]將多層建筑內3D 環(huán)境表示為多個2D 環(huán)境的組合來實現多樓層間的自主導航任務。但是,他們一方面沒有考慮到環(huán)境高度信息,另一方面全局規(guī)劃算法沒有考慮平臺特性,局部規(guī)劃算法無法很好地適應多層建筑物環(huán)境空間狹小等特點,容易陷入局部最小。
針對上述情況,考慮到多層建筑物環(huán)境空間狹小特點,本文利用地圖的分層表示方法將多層建筑內3D 運動規(guī)劃問題降解為2.5D,利用維諾路徑作為A*算法代價項,引入運動基元來實現路徑的運動學可行。通過履帶平臺運動學模型在動力學窗口內對其軌跡進行預測,引入波陣值評估方法,避免陷入局部最小。利用有限狀態(tài)機建立起無人平臺模式之間的關聯關系,實現多樓層建筑物內的自主導航任務。
1 多層建筑物內運動規(guī)劃框架
考慮到無人平臺在多樓層建筑物內進行自主導航任務時需要完成上、下樓梯等操作,本文在履帶式差速底盤的基礎上進行研究工作。
根據多樓層建筑物內環(huán)境的特點可以將自主導航任務分為3 種類型,同樓層內的運動規(guī)劃、上樓與下樓的運動規(guī)劃。針對于不同工況的特點,本文為無人平臺設計了3 種不同的工作模式,并利用有限狀態(tài)機決策模型(見圖1)實現多樓層間的運動規(guī)劃。多樓層間的運動規(guī)劃算法首先進入同樓層規(guī)劃模式,導航平臺到達同層目標點。若滿足條件1,即當前樓層小于目標樓層,則切換到上樓規(guī)劃模式。若滿足條件2,即當前樓層大于目標樓層,則切換到下樓模式。若滿足條件3,即當前樓層等于目標樓層,則再次進入同層規(guī)劃模式,最終到達目標點。
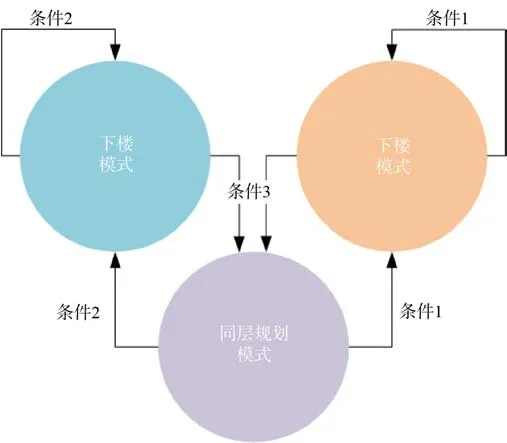
圖1 有限狀態(tài)機決策模型示意圖Fig. 1 Schematic diagram of Finite State Machine decision model
同樓層運動規(guī)劃算法如圖2 所示,由全局與局部規(guī)劃組成。全局規(guī)劃在全局地圖、維諾路徑、運動基元和定位信息的基礎上得到一條平滑、無碰撞的全局路徑發(fā)送到局部規(guī)劃。局部規(guī)劃結合全局路徑、局部地圖、波陣值、平臺運動學模型和定位信息得到最優(yōu)局部路徑和控制量,并發(fā)送到無人平臺。上、下樓模式在同層模式的基礎上對樓梯環(huán)境下進行適配,并在局部地圖中濾除了樓梯臺階作為障礙物的環(huán)境信息。在上樓模式中,首先需要對地圖進行處理,利用高度差值算法過濾掉臺階信息來實現在樓梯上的規(guī)劃,同時,需要增大轉向動作的懲罰,避免在樓梯上進行轉向操作,增大目標速度來克服爬樓梯時的坡道阻力。與上樓模式相同,首先也需要過濾掉臺階的障礙物信息,增大轉向動作的懲罰,減小目標速度提高下樓梯時無人平臺姿態(tài)的穩(wěn)定性。
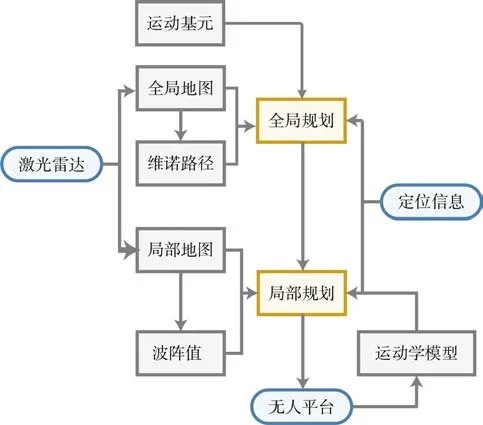
圖2 同樓層運動規(guī)劃框架示意圖Fig. 2 Schematic diagram of motion planning framework
對于多層建筑物內環(huán)境信息,本文采用基于分層的地圖表示方法,將問題進行降解求解。分層地圖將多層建筑物室內環(huán)境信息表示為多個2.5D 地圖和關鍵點,其中,2.5D 地圖是基于高度差信息建立的建筑物單層的柵格地圖,保存了樓層序號、單層內的可通行區(qū)域和障礙物信息;關鍵點是保存在相應地圖下的全局坐標,為樓梯或建筑物入口的坐標信息,代表著各個地圖之間的拓撲關系。關鍵點又分為兩種,一種是記錄進入當前層的入口信息,記作In,n為樓層數;另一種是出口信息,記作On。
圖3 展示了一個3 層建筑物環(huán)境地圖的表示方法的例子,圖中左側展示的是一個3 層建筑物的3D 結構示意圖,利用分層表示方法可以表示為圖中右側的形式。其中,Map1、Map2 和Map3 分別表示建筑物1 層、2 層和3 層環(huán)境對應的柵格地圖,綠色點表示進入該層的關鍵點,紅色點表示離開該層的關鍵點。因此,利用柵格地圖和關鍵點信息就可以表示出一個多層建筑物內的環(huán)境信息,為跨樓層的無人平臺運動規(guī)劃提供基礎。
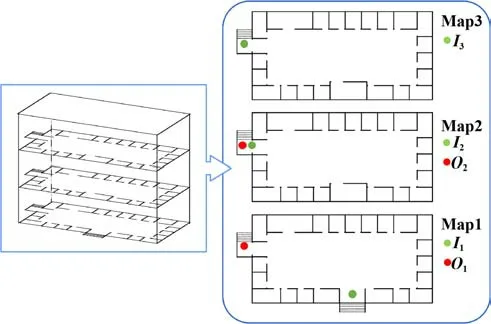
圖3 多層建筑物環(huán)境地圖示意圖Fig. 3 Schematic diagram of the multi-storey building hierarchical map
2 基于維諾路徑和運動基元的全局規(guī)劃 算法
本節(jié)主要討論用于多層建筑物中的全局規(guī)劃算法。考慮到多層建筑物環(huán)境具有空間狹小的特點,本文基于A*算法,考慮無人平臺運動學約束,并引入維諾路徑作為參考項,實現了在多層建筑物環(huán)境中規(guī)劃出平滑、無碰撞和運動學可行的全局 路徑。
2.1 維諾路徑
傳統A*算法[12-14]在搜索路徑時,只考慮路徑的長度代價值,本文利用維諾圖中的維諾路徑來為A*算法提供新的代價項,從而規(guī)劃出遠離障礙物的全局路徑,為平臺提供更安全的全局引導。
維諾圖[15-16]是由一組連接兩鄰近障礙物直線的垂直平分線組成的連續(xù)多邊形,這些多邊形的邊界稱做維諾路徑。典型室內環(huán)境柵格地圖如圖4(a)所示,其對應的維諾圖如圖4(b)所示,黑色線段即為維諾路徑。

圖4 室內環(huán)境柵格地圖及其維諾圖Fig. 4 Grid map of an indoor environment and its Voronoi map
傳統A*算法利用節(jié)點的代價值來進行搜索,總代價值F(k)可以表示為
式中:G(k)為從起點到節(jié)點k的路徑代價值;H(k)為節(jié)點k到目標點的啟發(fā)值,用來估計當前節(jié)點到目標點的距離,為兩者之間的歐氏距離;Sk-1,k為節(jié)點k-1 與節(jié)點k之間的路程。
根據維諾路徑的特點,假設A*算法中一待擴展節(jié)點p(k)以及維諾路徑V(x,y),則其維諾路徑代價項可以表示為
式中:vnearest為維諾路徑上距離p(k)最近的點。因此,搜索過程中總的代價值可以表示為
式中:α和β為路程代價與維諾路徑代價項權重 系數。
2.2 運動基元
由于A*算法得到的路徑是沒有考慮到無人平臺運動學約束的,不利于對路徑進行跟蹤,本文引入運動基元來求解運動學可行的全局路徑。
運動基元是路徑規(guī)劃問題中基本運動單元的簡稱。常用的基元是固定無人平臺縱向速度,給定角速度預測無人平臺在有限時間內行駛過的軌跡,通常給定不同的角速度生成多條軌跡。
根據傳統的基元設計思路,只通過增加運動基元數量來減少非直接可達區(qū)域的范圍,如圖5 所示,由于沒有充分利用履帶式平臺零半徑轉向的特點,導致規(guī)劃出的路徑更加復雜,同時也極大地增加了計算量。
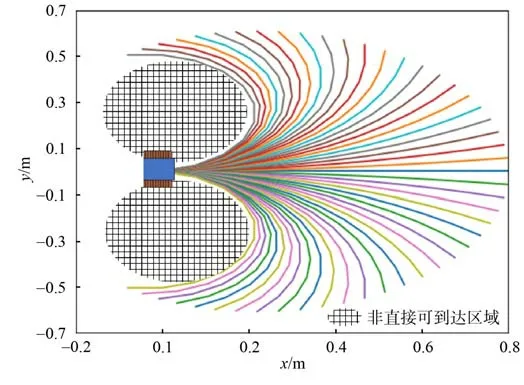
圖5 傳統運動基元方案示意圖Fig. 5 Schematic diagram of traditional motion primitives
本文將無人平臺前向運動基元簡化為7 個,如圖6 中彩色軌跡,并提出零半徑轉向基元的概念,如圖中箭頭,通過零半徑轉向基元與普通前向基元的組合可以實現更加靈活的全局路徑搜索。
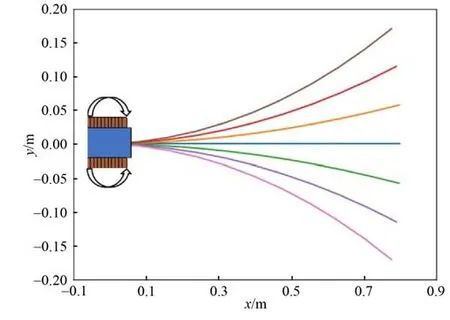
圖6 零半徑運動基元方案示意圖Fig. 6 Schematic diagram of zero-radius motion primitives
全局路徑搜索如算法1 所示。算法輸入為起始點、目標點和柵格地圖。首先,算法初始化兩個集合,分別用來存放待擴展和已擴展節(jié)點。在每次擴展節(jié)點過程中,開集合中代價值最小的節(jié)點會被移入閉集合,而該節(jié)點的子節(jié)點會被添加到開集合當中,如此迭代,直到擴展到目標節(jié)點,返回由節(jié)點構成的全局路徑。
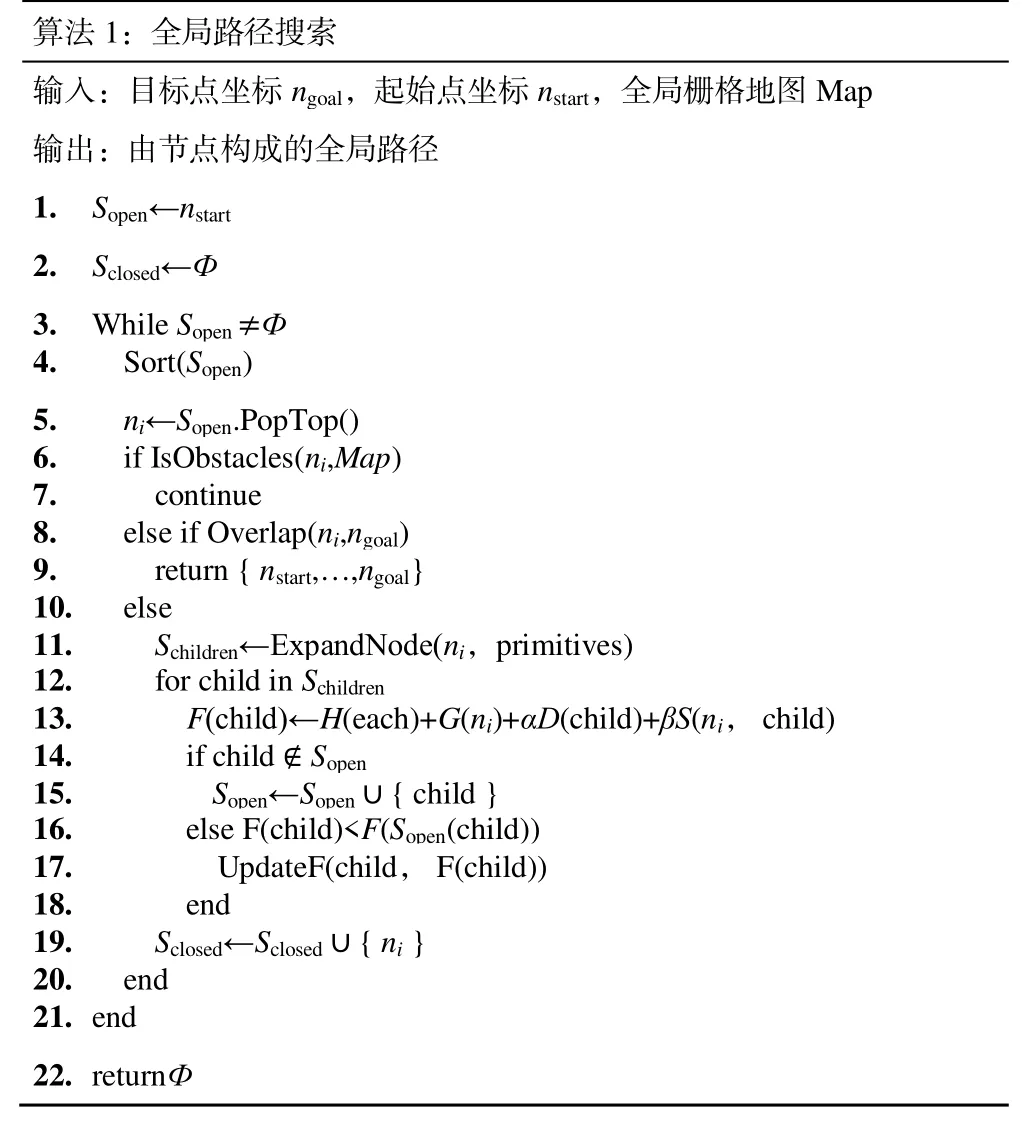
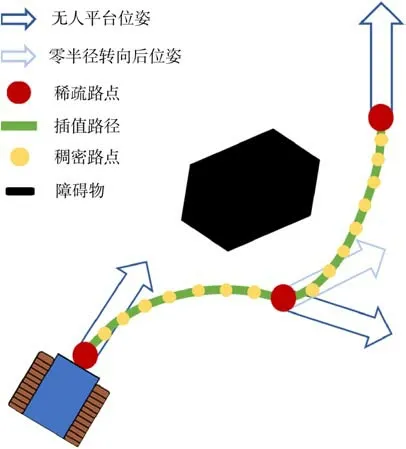
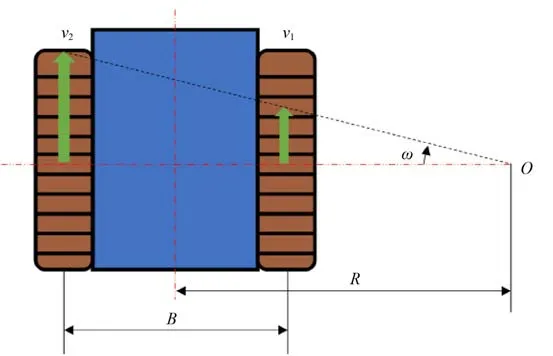
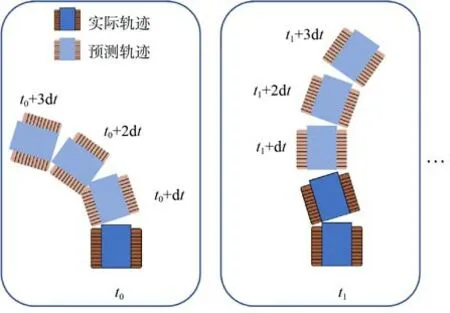
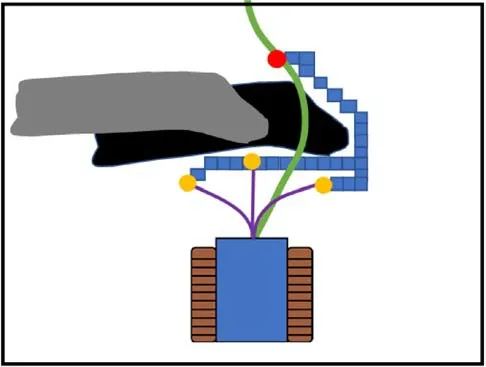
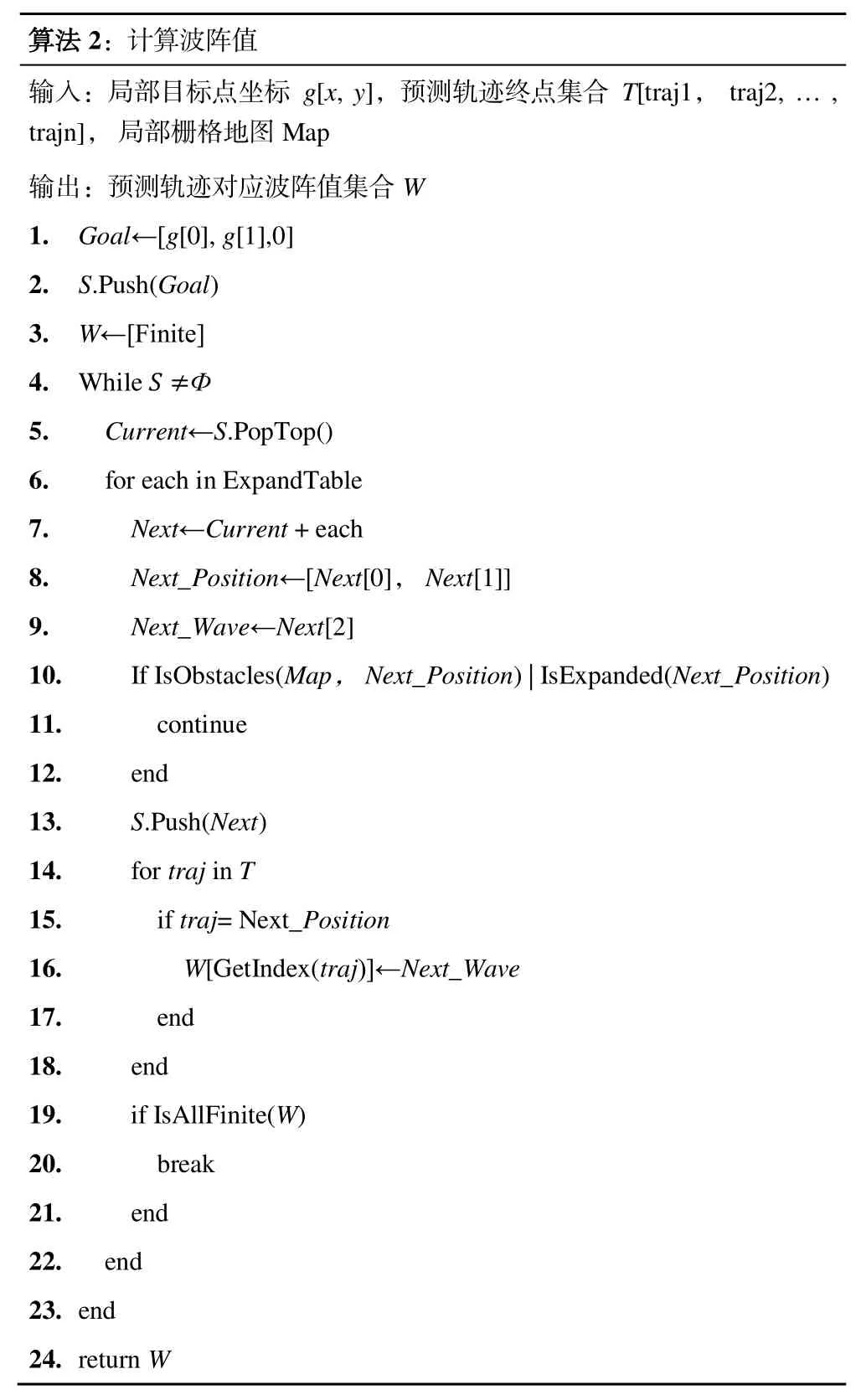
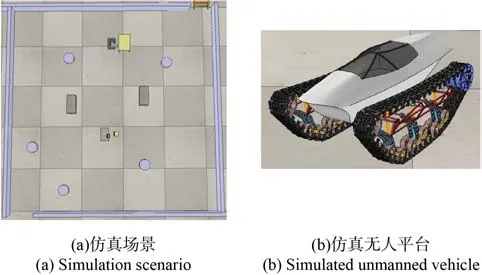
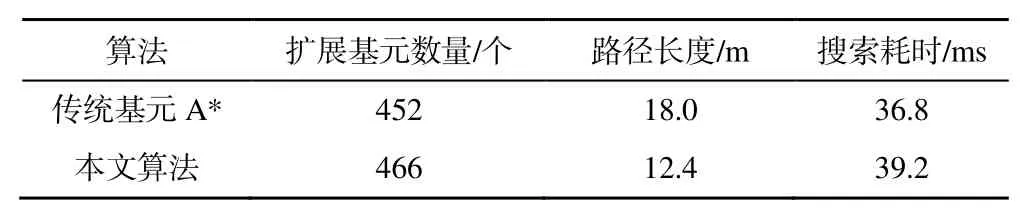
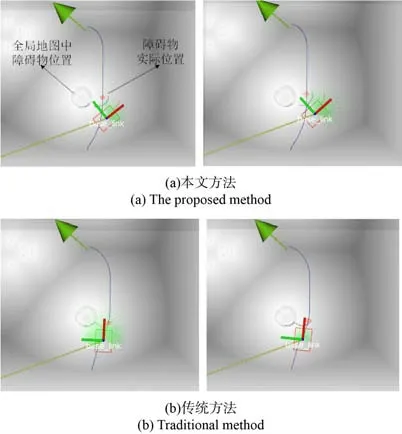
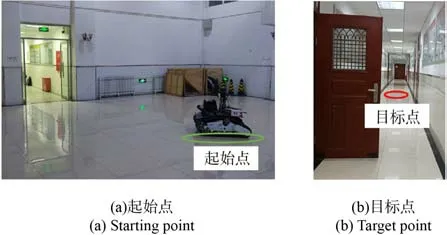
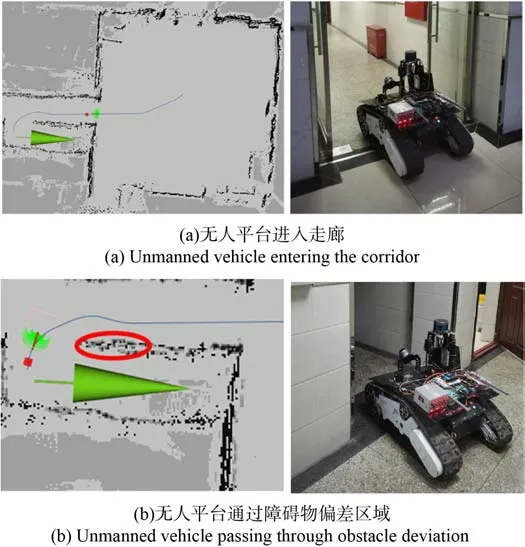
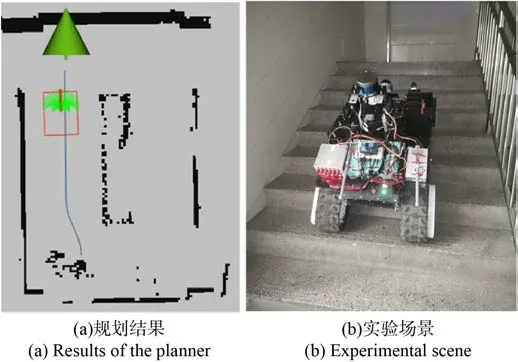
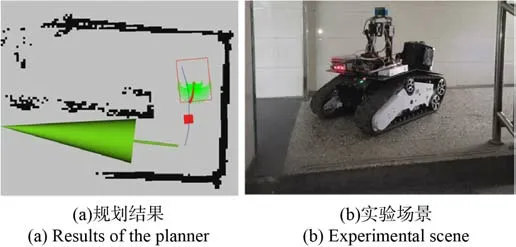
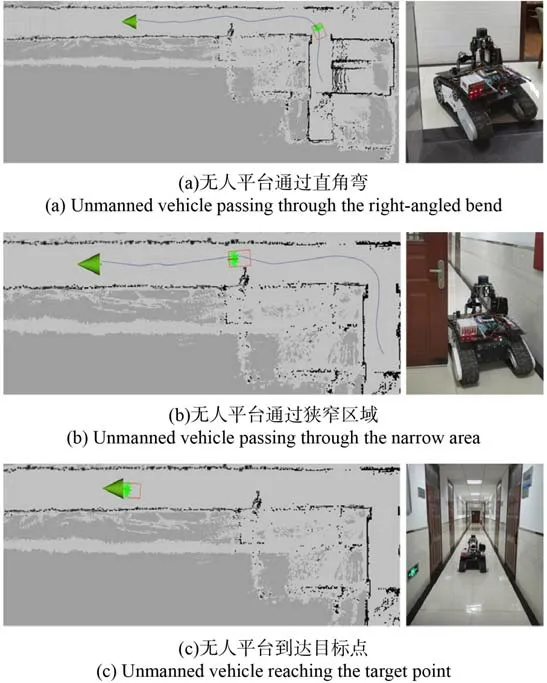
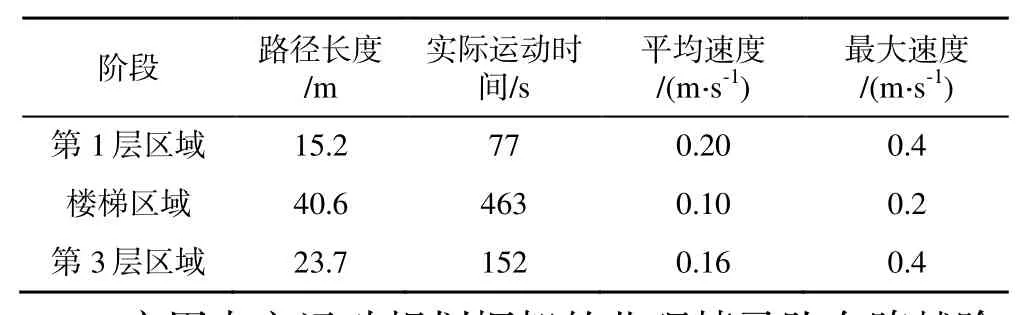
算法1:全局路徑搜索 輸入:目標點坐標ngoal,起始點坐標nstart,全局柵格地圖Map 輸出:由節(jié)點構成的全局路徑 1.Sopen←nstart2.Sclosed←Ф3. WhileSopen≠Ф4. Sort(Sopen) 5. ni←Sopen.PopTop() 6. if IsObstacles(ni,Map) 7. continue 8. else if Overlap(ni,ngoal) 9. return { nstart,…,ngoal} 10. else 11. Schildren←ExpandNode(ni,primitives) 12. for child inSchildren13. F(child)←H(each)+G(ni)+αD(child)+βS(ni,child) 14. if child ?Sopen15. Sopen←Sopen∪ {child } 16. else F(child) 通過改進基元A*算法直接得到的路徑仍然存在兩個問題,如圖7 所示,一方面是路徑上的路點為稀疏狀態(tài),如紅色圓點所示;另一方面是由于零半徑基元的存在,路徑存在不光滑區(qū)段,如圖中間的路點處發(fā)生了零半徑轉向,不利于無人平臺實現平順的路徑跟蹤。 圖7 路徑平滑示意圖Fig. 7 Schematic diagram of path smoothing 基于以上兩點,本文首先過濾掉零半徑轉向后的位姿,再利用路徑平滑算法從稀疏路點來得到平滑路徑,如圖7 中綠色曲線所示,在平滑路徑的基礎上進行插值,得到稠密路點,如黃色點所示。 考慮到全局路徑的導數與曲率連續(xù),同時避免龍格現象,本文采用分段三次Hermite 插值[17-18]來對稀疏路點進行處理。 給定稀疏路點集合P(x,y,θ),x和y為位置坐標,θ為航向角,把節(jié)點兩兩分段,在每一個小段上作三次Hermite 插值,就可以得到一個分段三次Hermite 插值函數H(x)。 首先,構造兩組基函數hi(x),Hi(x) (i=0, 1, …,n): 式中:li(x)為拉格朗日插值基函數, 因此,結合式(5)、式(6)和式(7),可以得到分段三次Hermite 插值函數為 在全局路徑的基礎上,本文利用履帶式無人平臺運動學模型在動力學窗口內對其軌跡進行預測與評估,并引入波陣值優(yōu)化距離評估方法,避免陷入局部最小。 履帶式無人平臺兩側的獨立驅動的履帶以不同速度進行運轉,由于兩側履帶的速率不同,此時在履帶平臺右側會形成一個轉動中心,平臺模型會以圖8 所示的轉向半徑R,繞著轉動中心O以ω的角速度進行轉向。圖8 中,v1、v2為左側和右側履帶速度,B為履帶中心距。 圖8 履帶式無人平臺運動幾何關系示意圖Fig. 8 Schematic diagram of the kinematic geometric relationship of the tracked unmanned platform 根據幾何關系,可以計算出轉向半徑R: 同時,低速狀態(tài)下忽略滑轉與滑移,履帶式無人平臺運動學模型為 式中:vx和vy為平臺在x軸和y軸方向的速度;θ為平臺航向角。 由剛體運動學可以得知軌跡傳播方程: 式中:xt、yt、θt為t時刻平臺位姿;ωt為t時刻角速度。 基于運動學模型,結合式(9)、式(10)和 式(11),可以得到軌跡預測方程: 在軌跡預測方程的基礎上,本文引用模型預測控制[19]的思想,如圖9 所示,根據當前時刻t0無人平臺的運動狀態(tài),在控制空間內采樣得到一組控制量,以dt時間為步長,來預測未來一段時間內無人平臺的狀態(tài),然后執(zhí)行最優(yōu)路徑對應的控制量來驅動無人平臺運動dt的時間長度,來到t1時刻的狀態(tài)。以此類推,不斷進行預測與執(zhí)行控制量,直到到達目標點。 圖9 軌跡預測示意圖Fig. 9 Schematic diagram of trajectory prediction 在無人平臺運動學的基礎上進行軌跡預測之前,需要對無人平臺的控制空間進行采樣,由于無人平臺動力學的約束,其采樣區(qū)間也被限制在動力學窗口[20]之內。 1)最大加速度與最大減速度約束 在無人平臺實際運動過程中,由于驅動電機轉矩等的限制,其具有最大的加速度和減速度。假設最大加速度和減速度為aa和ad,最大角加速度和角減速度為αa和αd。 式中:vt為t時刻的平臺速度。 2)最大與最小速度約束 式中:vmin和vmax分別為平臺最小速度與最大速度;ωmin與ωmax分別為平臺最小角速度與最大角速度。 3)安全距離約束 在無人平臺當前位置處,為避免與障礙物發(fā)生碰撞,無人平臺當前速度對應的剎車距離應該小于距離最近障礙物的距離。因此可以得到 式中:dist為t時刻最近障礙物的距離。 履帶無人平臺在進行軌跡預測之后,如圖10中紫色軌跡,可以得到軌跡的終點,如黃色圓點。由于定位誤差以及環(huán)境噪聲等的干擾,全局地圖中障礙物(灰色)會與實際障礙物(黑色)位置存在偏差。如果根據傳統軌跡評估的原則,中間軌跡距離局部目標點(紅色圓點)最近,會成為最優(yōu)路徑。然而,中間路徑會導致無人平臺陷入局部最小。 圖10 波陣值避免局部最小示意圖Fig. 10 Schematic diagram of Wavefront Value avoiding local minimum 本文引入混合A*算法[21]中的波陣值(Wavefront Value)來提高算法應對障礙物信息偏差時的魯棒性。波陣值是一種考慮到障礙物信息后地圖上一點到目標點的距離度量,可以利用算法2 計算得到。算法2 的輸入為局部目標點和預測軌跡的端點集合,然后從目標點出發(fā),向鄰近的8 個柵格方向進行反向搜索,若為障礙物則跳過,則直到搜索到所有預測軌跡端點時,過程中搜索路程長度即為波陣值最為算法的輸出。 當利用波陣值對軌跡進行評估時,由于其具有考慮到環(huán)境中障礙物的特性,右側軌跡終點到達局部目標點的波陣值最小,即藍色方塊的數量最小,為最優(yōu)軌跡,因此可以繞過障礙物,避免局部最小。 算法2:計算波陣值 輸入:局部目標點坐標g[x,y],預測軌跡終點集合T[traj1,traj2, … , trajn],局部柵格地圖Map 輸出:預測軌跡對應波陣值集合W1.Goal←[g[0], g[1],0]2.S.Push(Goal) 3.W←[Finite]4. While S ≠Ф5. Current←S.PopTop() 6. for each in ExpandTable 7. Next←Current+ each 8. Next_Position←[Next[0],Next[1]]9. Next_Wave←Next[2]10. If IsObstacles(Map,Next_Position) | IsExpanded(Next_Position) 11. continue 12. end 13. S.Push(Next) 14. fortrajinT15. iftraj= Next_Position16. W[GetIndex(traj)]←Next_Wave17. end 18. end 19. if IsAllFinite(W) 20. break 21. end 22. end 23. end 24. returnW 為評價本文提出的多層建筑物內運動規(guī)劃框架的性能,針對全局與局部規(guī)劃模塊,在仿真環(huán)境中,采用本文方案和傳統運動規(guī)劃方法進行對比實驗,進而通過實車實驗來證明本文方案的可行性。 為測試全局和局部規(guī)劃算法的性能,本文在Vrep 中搭建圖11(a)所示虛擬環(huán)境作為算法的輸入,搭建圖11(b)所示無人履帶平臺模型作為算法的被控對象,配備有激光雷達和定位模塊。算法在Linux 環(huán)境和ROS 平臺下運行,對虛擬環(huán)境的輸入信息進行處理后,將得到的路徑下發(fā)給無人平臺模型,最后對結果進行統計分析,實現對算法的仿真測試。 圖11 仿真環(huán)境示意圖Fig. 11 Schematic diagram of the simulation environment 全局規(guī)劃仿真結果如圖12 所示,綠色箭頭為目標點,紅色扇形為算法擴展結點集合。如表1 所示,從中可以看到,在擴展節(jié)點數量增加3%、平均耗時增加6%的條件下,全局路徑長度減少了31%,且距離障礙物更遠、路徑更加安全。 表1 全局規(guī)劃仿真結果Table 1 Simulation results of the global planner 圖12 全局規(guī)劃仿真結果對比圖Fig. 12 Comparison of the global planner’s simulation results 局部規(guī)劃仿真實驗通過偏移障礙物的位置來模擬障礙物位置偏差的情形。圓形障礙物在全局地圖中位置如圖13所示,由于定位和建圖誤差,實際障礙物在圓形障礙物右側,激光雷達掃描到其前部,在地圖中為半圓形。圖13中,藍色曲線為全局路徑,紅色矩形為無人平臺地面投影,綠色曲線為局部規(guī)劃的待選軌跡,紅色曲線為最優(yōu)軌跡。圖13(a)展示的是本文的局部規(guī)劃算法篩選出最優(yōu)軌跡并成功繞過了障礙物,圖13(b)中的傳統局部規(guī)劃算法在障礙物面前陷入局部最小。 圖13 局部規(guī)劃仿真對比圖(左為遇到障礙物,右為繞過障礙物)Fig. 13 Comparison of the local planner’s simulation results (left picture shows encountering obstacles, right picture shows bypassing obstacles) 本文真實場景實驗所使用的是履帶式無人平臺,如圖14 所示。本文依賴的傳感器有安裝于無人平臺頂部的16 線激光雷達和前部的32 線補盲雷達,承擔著感知與定位的任務。除傳感器外,無人平臺還配備有一臺主頻為3.6 Hz 的工控機,感知、定位與規(guī)劃程序都在該計算平臺上運行。本文實驗中感知模塊使用的是基于激光雷達的概率柵格地圖程序,定位模塊使用的是激光SLAM 程序,規(guī)劃模塊使用的是本文提出的多層建筑物運動規(guī)劃框架。 圖14 實驗無人平臺外觀Fig. 14 Appearance of the unmanned platform in the experiment 首先,通過遙控無人平臺在多層建筑物內進行建圖,獲取建筑物的三維點云信息并以分層地圖的方式存儲下來。在此基礎上設置建筑物一層大廳內一點為起點,3 層長走廊內一點為終點,如圖15所示,開始自主導航任務。 圖15 實驗起始點與目標點Fig. 15 Starting point and target point in the experiment 在1層環(huán)境中規(guī)劃結果如圖16所示,其中藍色曲線為全局路徑,綠色曲線為局部路徑,綠色箭頭為目標點,可以看出,規(guī)劃出的全局路徑平滑連接到目標點,且遠離障礙物,無人平臺順利進入狹長走廊,如圖16(a)所示。由于室內狹長走廊的對稱性以及墻壁瓷磚反射效應的影響,激光SLAM定位在此區(qū)域誤差增大,如圖16(b)紅色圓圈部分,這段直角轉彎區(qū)域墻壁發(fā)生了彎曲且長度縮短,導致地圖中轉彎入口處相比實際的1.0 m寬度變大。在這種狹窄區(qū)域障礙物位置出現較大偏差的情形下,無人平臺避免了陷入局部最小值,成功通過該區(qū)域如圖16(b)所示。 圖16 1 層樓內實驗結果(左為規(guī)劃路徑,右為實景)Fig. 16 Experimental results of the first floor (the left is the planned path, and the right is the real scene) 在此基礎上,無人平臺開始在樓梯上進行自主導航任務。圖17 和圖18 所示為無人平臺在樓梯和轉臺上規(guī)劃出的路徑與實驗場景,從中可以看出通過高度差將樓梯信息過濾后,無人平臺在樓梯模式中可以規(guī)劃出更加平直的路徑。 圖17 樓梯區(qū)域實驗結果Fig. 17 Experimental results of the stair area 圖18 轉臺區(qū)域實驗結果Fig. 18 Experimental results of the platform area 圖19為在3層時的實驗結果。圖19(a)中無人平臺跟蹤全局路徑成功通過1 m寬的直角轉彎,進入狹長走廊。在走廊中有一扇打開的門,可通行空間寬度為0.90 m,而平臺寬度為0.80 m,剩余空間狹窄。如圖19(b)所示,無人平臺成功穿越狹窄區(qū)域。最后,如圖19(c)所示,無人平臺到達目 標點。 圖19 第3 層樓實驗結果(左為規(guī)劃路徑,右為實景)Fig.19 Experimental results on the third floor (the left is the planned path, right is the real scene) 實車實驗結果見表2,無人平臺經過第1 層區(qū)域、樓梯區(qū)域和第3 層區(qū)域3 個階段,其中第1 層起始區(qū)域空間相對寬闊,平均速度也最高;樓梯區(qū)域由兩層共6 段樓梯組成,路徑長度最長,同時為保證樓梯上平臺運行的安全,最大速度也最小,導致花費時間最長;第3 層區(qū)域空間狹窄,平臺處于低速狀態(tài)更多,因此平均速度下降。在實驗過程中,算法的頻率能夠穩(wěn)定在10 Hz,并完成多層建筑物內的自主導航任務。 表2 實車實驗結果Table 2 Results of the experiment 應用本文運動規(guī)劃框架的北理精靈隊在跨越險阻2021 地面無人系統挑戰(zhàn)賽中取得了第4 名的 成績。 本文針對多層建筑物內無人平臺的自主導航問題,提出了一個針對于多層建筑環(huán)境優(yōu)化的運動規(guī)劃框架。通過仿真與實車實驗驗證,得到以下主要結論: 1)在全局規(guī)劃層面,提出零半徑轉向基元并引入維諾路徑,全局規(guī)劃算法在擴展節(jié)點數量增加3%、平均耗時增加6%的條件下,全局路徑長度減少了31%,且距離障礙物更遠,路徑更加安全,提高了在狹窄區(qū)域規(guī)劃路徑的靈活性。 2)在局部規(guī)劃層面,引入波陣值作為評估項,局部規(guī)劃算法相比于傳統算法避免了陷入局部最小值,提高了算法的魯棒性。 3)經過實車實驗,基于本文運動規(guī)劃框架的無人平臺在多層建筑物內完成了自主導航任務,證明了方案的可行性。2.3 路徑平滑
3 基于模型預測與波陣值的局部規(guī)劃算法
3.1 運動學模型與軌跡預測
3.2 基于動力學窗口的控制空間采樣
3.3 基于波陣值的軌跡評估
4 實驗與結果分析
4.1 仿真實驗

4.2 實車實驗

5 結論
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
