6自由度液壓機器人末端執行器控制策略
2023-04-14 23:56:31李亞昆崔戰友
中國工程機械學報 2023年6期
李亞昆,崔戰友
(鄭州工業應用技術學院 機電工程學院,河南 鄭州 451100)
目前,機器人的驅動主要采用電機、液壓和氣動系統。液壓驅動系統具有反應速度快、運動穩定、強負荷力[1-2]等優點,較快占據了主導地位。但也存在一些不足,比如機器人關節尺寸受到限制,不適合重型場合;液壓系統閥控的動態特性不連續,易受到負載的擾動等,使得機器人運動精度下降。與國外發達國家相比,我國在機器人液壓驅動系統方面的研究起步較晚,存在一定的差距。如何在短時間內提高機器人液壓驅動控制精度,盡快趕超國外液壓機器人先進控制技術,使得機器人在復雜環境中保持較高的輸出精度,是科研人員研究的熱門方向。因此,提升機器人液壓驅動控制性能,具有十分重要的意義。
當前,為了提高機器人末端執行器定位精度,國內外學者對機器人末端執行器定位精度展開了研究。Navid等[3-4]研究6自由度并聯機器人線性化徑向基函數(radial basis function,RBF)神經滑模控制方法,通過仿真驗證其跟蹤效果,仿真結果滿足了設計的要求。朱龍英等[5-6]研究并聯機器人神經網絡自適應控制方法,將改進的粒子群算法用于神經網絡比例積分微分(proportional integral derivative,PID)控制參數調整,從而得到并聯機器人最優控制參數。明瑞浩等[7-8]研究2 自由度并聯機器人非線性同步控制方法,設計了機器人非線性同步控制方案,通過仿真驗證機器人末端執行器跟蹤誤差,具有較好的跟蹤精度。以往研究的并聯機器人末端執行器,在控制精度方面有所提高,但隨著企業加工精度的要求越來越高,現有控制精度已較難滿足高精度產品的需要。因此,本文建立6 自由度液壓并聯機器人示意圖,設計了增量式非線性逆控制方法。在不同期望信號條件下,通過Matlab軟件對并聯機器人末端執行器位置跟蹤誤差進行仿真,對比非線性逆控制方法的輸出效果,為深入研究6 自由度并聯機器人末端執行器跟蹤誤差提供參考價值。
1 液壓系統動力學模型
本文研究的6自由度液壓并聯機器人如圖1所示,主要包括上下2 個平臺、6 個伺服液壓缸和6 個活塞桿。圖1 中,XaYaZa-Oa為上平臺坐標系,XbYbZb-Ob為下平臺坐標系,1、2、3、4、5、6 為6 個液壓缸。下平臺為基座,通常固定不動,通過液壓缸驅動上平臺運動。液壓驅動系統如圖2 所示,圖中,xm為滑閥位移,q為執行器位移矢量。當滑閥向左移動時,液壓油通過油管流入氣缸室,驅動執行器向右移動;當滑閥向右移動時,液壓油通過油管流入氣缸室,驅動執行器向左移動。執行器向左或者向右移動,從而驅動6 自由度機器人上平臺的伸長與縮短。
n桿機器人的剛體動力學方程一般采用Ⅱ階非線性微分方程。特別是對于本研究中所考慮的并聯機器人系統,采用牛頓-歐拉方法來獲得笛卡爾空間中的動力學方程如下:
式中:z、s′和s″分別為笛卡爾空間中定義的末端執行器位姿、速度向量和加速度向量;F為驅動力矢量;M為質量矩陣;η為離心力和科里奧利力矩陣;J為雅可比矩陣。
典型閥門控制的單對稱液壓執行機構如圖2所示。
Φp1、Φp2分別為流入和流出氣缸室的液壓油流量,Ps、Pt分別為供油和回油壓力。
液壓缸動力學方程[9-10]為
式中:Ap為活塞面積,m2;Cl為泄漏系數,L/s·Pa;PL=(Pp1-Pp2)為液壓缸壓力差,Pa;Φm=(Φp1-Φp2)/2 為液壓油流量,L/s;Cm為液壓油液壓剛度,Pa/L;q為執行器位移,m。
液壓油液壓剛度表達式[11]為
式中:E為液壓缸油的體積模量,Pa;V1和V2為氣缸室體積,L。
對于具有匹配和對稱節流孔的理想臨界中心閥,液壓油流量表達式為
式中:Cd為流量系數,L/m3;w為孔口寬度,m;xm為滑閥位移,m;Ps為供油壓力,Pa。
將最大閥門行程xm,max和零負載壓力下的最大流量定義為
由式(3)和式(5)可以得到如下表達式:
式中:GA(PL,xm,q)為一個函數表達式;fA(PL,q,q′)為一個函數表達式;u為控制輸入。
2 增量非線性動態逆控制
n階非線性控制輸入系統方程式[12]定義為
式中:f為向量場;d為外部干擾;G為控制效果矩陣;h(x)為一個函數表達式。
x、d、h假設是連續的。假設f(x)和G(x)是x的函數,所有微分都是有界的。
假設h(x)=x,系統的相對度為(1,1,…,1)1×n,輸出的Ⅰ階時間導數為
式中:y=f(x)為一個函數。
對于m=n的全驅動系統,如果G(x)是可逆的,采用傳統的非線性動態逆或一般的反饋線性化方法。與非線性動態逆方法不同,為了得到所研究系統的增量形式,在每個采樣間隔(用下標0 表示)的開始時刻,應用泰勒級數對[13]式(9)中的系統動力學展開后得到表達式如下:
假設對式(10)等式定義為
式中:O為無窮小的一種表示符號。
則式(10)可轉換為
式中:x′0為系統狀態導數。
利用x和d的連續性及f(x)和G(x)微分的有界性,將式(11)的極限計算為
式(12)中的系統輸入u不假定連續性。在給定的每個采樣間隔內,采用式(12)中的非線性動態逆設計增量非線性動態逆控制律,表達式為
式中:v為偽控制輸入。
對于每個采樣間隔,計算控制增量Δu=G-1(x0)(v-x′0)并遞歸地添加到u0,即前一個樣本的集成或測量控制輸入,如圖3所示。
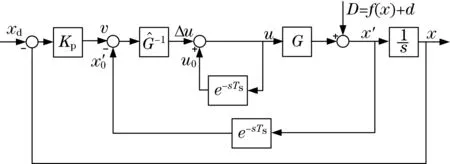
圖3 增量非線性動態逆控制器Fig.3 Incremental nonlinear dynamic inversion controller
由于系統被線性化為單積分器,因此,通常選擇簡單的比例控制器作為偽控制ν。圖3 給出了增量非線性動態逆控制器的一般結構,其中表示單個采樣時間Ts中的傳輸延遲。當G存在模型不確定性時,用估計值?作為控制器。
因此,式(14)寫成遞歸離散形式為
式中:uk、uk+1為控制輸入k次和k+1 次;xk-1、x′k-1為控制輸入k-1次和k-1次變化率。
由式(12)和式(14)可得表達式如下:
由式(13)和式(16)可知,在無限小的采樣時間下,系統是完全線性化的。簡單地選擇線性控制律v=x′d+Kp(xd-x),則系統誤差動力學表達式如下:
式中:e=x-xd為誤差;x為實際軌跡;xd為期望軌跡。
3 結果與分析
6自由度液壓并聯機器人末端執行器采用增量式非線性逆控制方法,通過Matlab軟件進行仿真驗證,可知執行器跟蹤誤差效果,并與非線性逆控制輸出結果進行對比。仿真參數設置如下:執行器等效質量m= 3 000 kg,液壓缸行程l=1.0 m,負載力F= 50 kN,工作壓力為P=150 bar,仿真時間t=4 s。
假設并聯液壓機器人末端執行器期望信號如圖4 所示,則采用非線性逆控制方法跟蹤誤差如圖5 所示,采用增量式非線性逆控制方法跟蹤誤差如圖6所示。
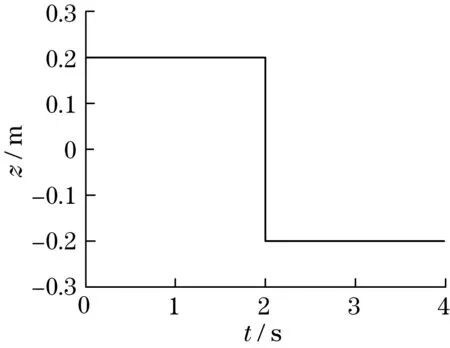
圖4 階躍波信號Fig.4 Step wave signal
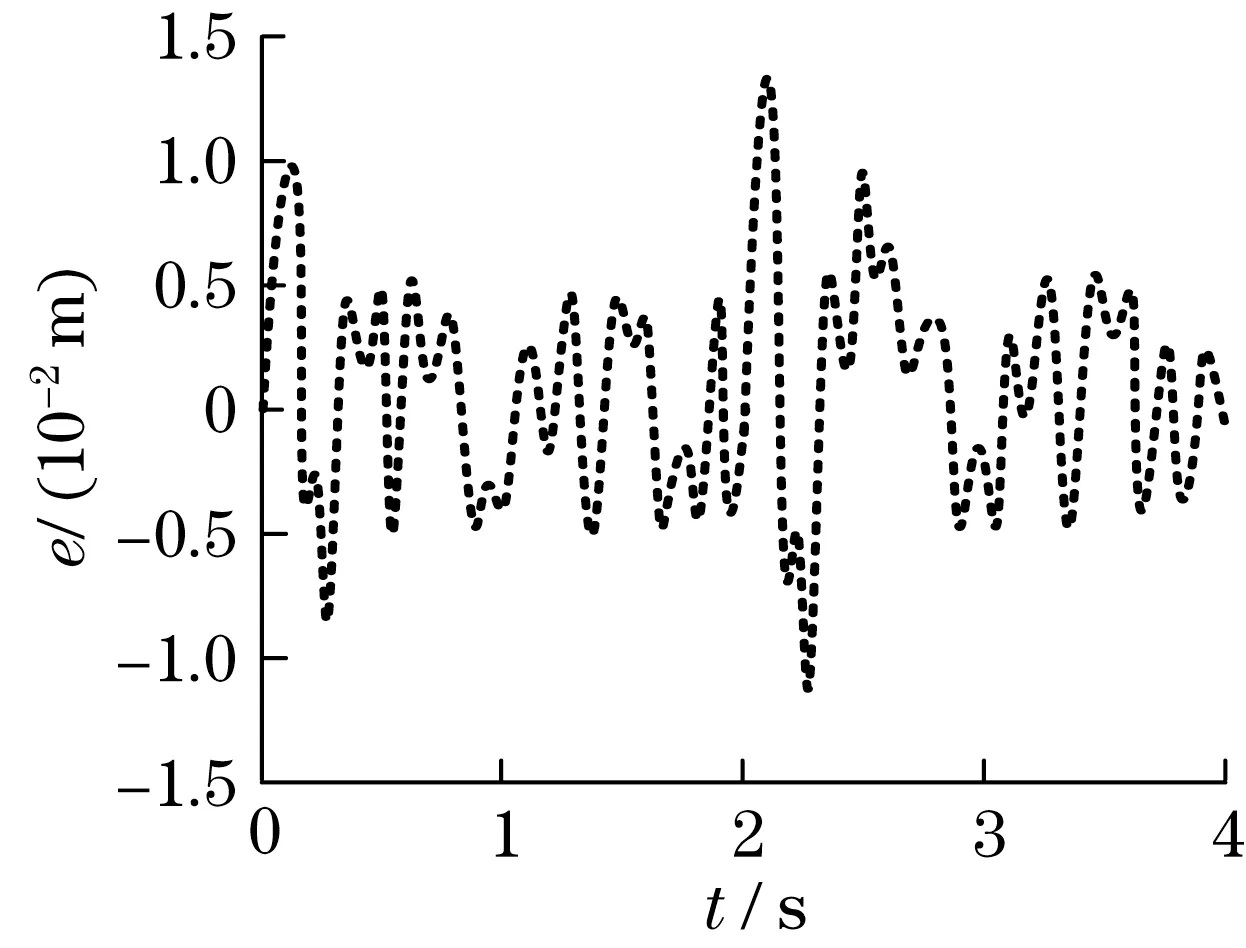
圖5 非線性逆控制方法Fig.5 Nonlinear inverse control method
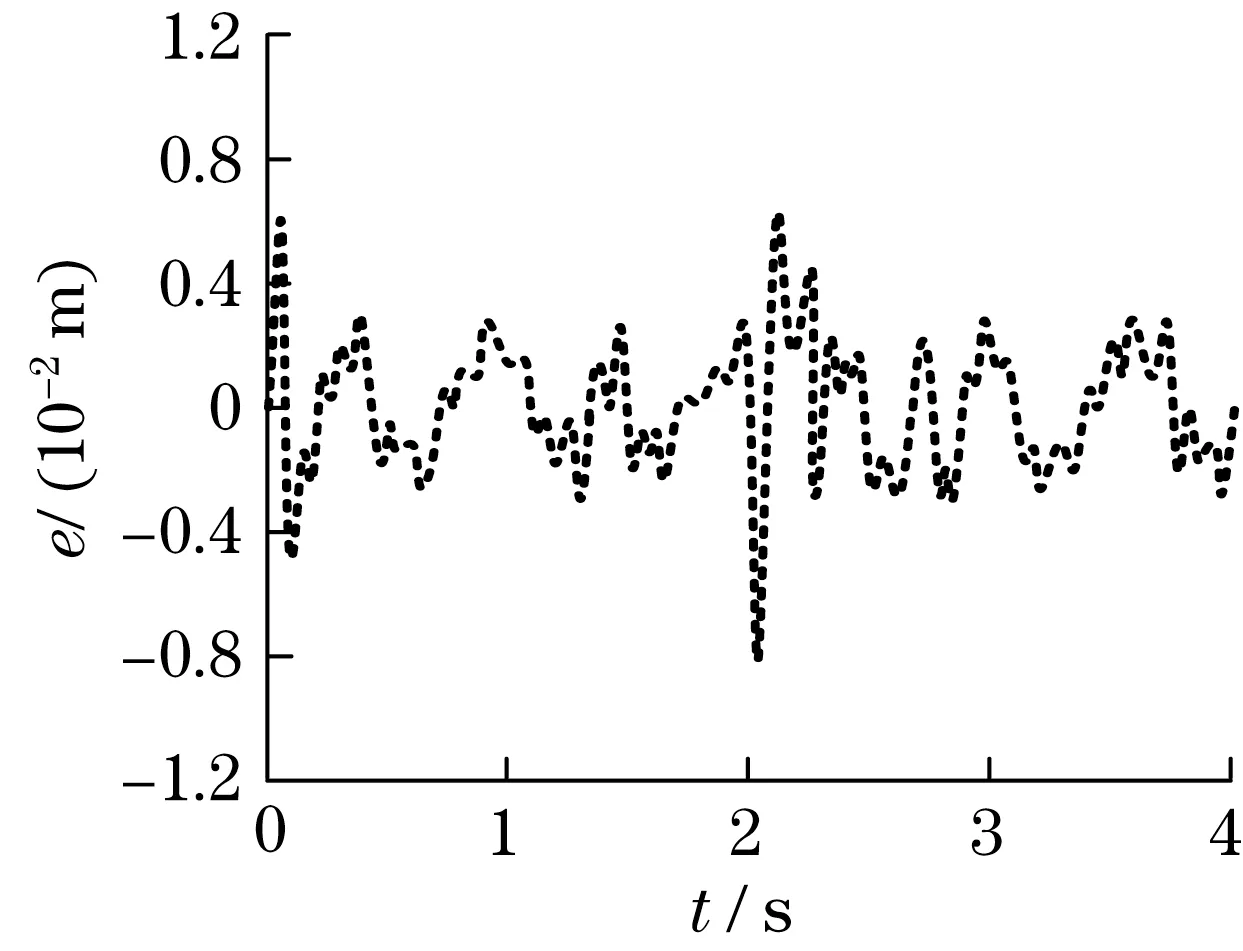
圖6 增量式非線性逆控制方法Fig.6 Incremental nonlinear inverse control method
由圖5 和圖6 可知,如果機器人末端執行器期望信號為階躍信號,采用非線性逆控制方法,機器人末端執行器產生的最大誤差為1.39×10-2m,當控制系統處于穩定狀態時,其誤差在[-0.5×10-2, 0.5×10-2] m 范圍內。而采用增量式非線性逆控制方法,機器人末端執行器產生的最大誤差為0.8×10-2m,當控制系統處于穩定狀態時,其誤差在[-0.3×10-2, 0.3×10-2] m 范圍內。同等條件下,通過輸出誤差對比,采用增量式非線性逆控制方法,機器人末端執行器輸出誤差較小,能夠提高機器人末端執行器追蹤精度。
4 結論
針對6 自由度液壓機器人末端執行器運動軌跡跟蹤誤差較大問題,設計了增量式非線性逆控制的液壓系統,通過仿真驗證末端執行器跟蹤效果,主要結論如下。
(1) 采用非線性逆控制方法,6 自由度液壓機器人末端執行器跟蹤誤差較大,而采用增量式非線性逆控制方法,6 自由度液壓機器人末端執行器跟蹤誤差較小。
(2) 采用Matlab 軟件對機器人末端執行器跟蹤誤差進行仿真,可以檢驗不同控制方法輸出效果,為設計人員提供參考資料,避免控制方法設計不當而造成控制系統輸出精度下降。
