
搖臂軸助力式循環(huán)球EPS系統(tǒng)的控制策略
2023-04-29 00:44:03胡鵬龔偉謝剛鐘良廖俊富李剛
西南科技大學(xué)學(xué)報 2023年1期
胡鵬 龔偉 謝剛 鐘良 廖俊富 李剛


摘要:設(shè)計了一種搖臂軸助力式循環(huán)球EPS系統(tǒng),采用滑模控制方法設(shè)計系統(tǒng)控制器。在考慮了二級減速機械結(jié)構(gòu)磨損的基礎(chǔ)上,建立EPS系統(tǒng)的狀態(tài)方程,并根據(jù)滑模控制理論求出EPS系統(tǒng)的切換函數(shù),然后采用一種優(yōu)化后的指數(shù)趨近律來限制切換函數(shù)的1階導(dǎo)數(shù)。通過MATLAB/Simulink建立EPS系統(tǒng)動態(tài)模型并仿真,結(jié)果表明滑模控制下的EPS系統(tǒng)跟隨性好、超調(diào)量小,且有效削弱了滑動模態(tài)切換引起的抖振。研究結(jié)果可供新能源汽車轉(zhuǎn)向系統(tǒng)的設(shè)計與開發(fā)參考。
關(guān)鍵詞:EPS系統(tǒng)滑模控制趨近律抖振
中圖分類號:U463.4文獻標志碼:A文章編號:1671-8755(2023)01-0075-09
Abstract:EPSsystemwithrockershaftassistedcirculatingballwasdesigned,andtheslidingmodecontrolmethodwasusedtodesignthesystemcontroller.Onthebasisofconsideringthewearofthemechanicalstructureofsecondaryreducer,thestateequationoftheEPSsystemwasestablished,theswitchingfunctionoftheEPSsystemwasobtainedaccordingtotheslidingmodecontroltheory,andthenanoptimizedexponentialapproachlawwasusedtolimitthefirstderivativeoftheswitchingfunction.ThedynamicmodelofEPSsystemwasestablishedandsimulatedbyMATLAB/Simulink.TheresultsshowthattheEPSsystemunderslidingmodecontrolhasgoodfollowingperformanceandsmallovershoot,andeffectivelyweakensthechatteringcausedbyslidingmodeswitching,whichcanprovideareferenceforthedesignanddevelopmentofthesteeringsystemofnewenergyvehicles.
Keywords:EPSsystem;Slidingmodecontrol;Approachlaw;Chattering
循環(huán)球EPS系統(tǒng)由轉(zhuǎn)向器機械結(jié)構(gòu)、助力電機、減速器、離合器和電子控制單元等組成。在系統(tǒng)的控制過程中,電子控制單元接收來自各傳感器的信號并進行分析,再根據(jù)控制策略給出控制信號,實現(xiàn)預(yù)期助力目標,控制車輛穩(wěn)定轉(zhuǎn)向[1]。21世紀清潔能源的快速發(fā)展為汽車EPS系統(tǒng)的設(shè)計研發(fā)提供了無限可能[2]。在對汽車EPS研發(fā)的過程中,出現(xiàn)了許多可參考的控制方法。李耀華等[3]考慮路面附著系數(shù)的影響,將基于模糊控制的電流補償控制策略與基于轉(zhuǎn)向阻力矩的控制策略對比發(fā)現(xiàn),前者具有更好的轉(zhuǎn)向輕便性。商顯赫等[4]基于DSpace的試驗臺架進行EPS系統(tǒng)試驗驗證,得出滑模控制策略遠比PID控制策略的超調(diào)量小,能夠?qū)崿F(xiàn)對目標電流的實時跟隨,并提高系統(tǒng)的魯棒性。李洪強等[5]對常規(guī)PID控制和基于粒子群算法的PID控制進行了仿真對比,發(fā)現(xiàn)基于粒子群算法的PID控制策略系統(tǒng)響應(yīng)時間更快,趨于穩(wěn)定所用時間更短。商顯赫等[6]采用基于BP神經(jīng)網(wǎng)絡(luò)的PID自適應(yīng)控制,實現(xiàn)了PID算法參數(shù)的自整定、EPS系統(tǒng)在助力模式下的轉(zhuǎn)向輕便性和對目標電流較好的跟隨性。王燮輝等[7]基于MATLAB/Simulink和DSpace搭建C-EPS硬件在環(huán)仿真平臺,實現(xiàn)了主動回正功能和C-EPS的主觀評價,并能及時發(fā)現(xiàn)C-EPS在軟硬件上的不足之處。孟令廣等[8]針對實驗改裝的城市電動物流車的EPS系統(tǒng),采用模糊PID控制在不同車速下進行系統(tǒng)仿真,驗證了模糊PID控制比傳統(tǒng)PID控制具有更好的轉(zhuǎn)向控制性能。汪洪波等[9]將可拓模糊切換控制與模糊切換控制、直接切換控制進行系統(tǒng)仿真對比,發(fā)現(xiàn)可拓模糊切換控制具有更小的切換沖擊和更高的切換平穩(wěn)性,實現(xiàn)了EPS多模式的平滑切換。翁敬良等[10]采用H∞魯棒控制對路感仿真結(jié)果、EPS系統(tǒng)的助力特性和操縱穩(wěn)定性進行分析,發(fā)現(xiàn)基于H∞混合靈敏度控制的EPS系統(tǒng)有助于提高車輛轉(zhuǎn)向時的輕便性以及操縱穩(wěn)定性。趙萬忠等[11]提出了“上層混合H2/H∞電流決策控制+下層模糊PID電流跟蹤控制”的控制策略,實現(xiàn)了EPS系統(tǒng)對路面低頻信息的有效獲得和對高頻干擾的抑制。晉兵營等[12]用遺傳算法離線優(yōu)化法對TSK型模糊控制器進行優(yōu)化,實現(xiàn)了對電動機目標電流在負載變化和噪聲干擾下的準確、快速跟蹤。
本文設(shè)計了一種搖臂軸助力式循環(huán)球EPS系統(tǒng),采用滑模控制來設(shè)計系統(tǒng)控制器。通過MATLAB/Simulink建立EPS系統(tǒng)動態(tài)模型并進行仿真,驗證方法的有效性和可行性。
1EPS系統(tǒng)動力學(xué)模型
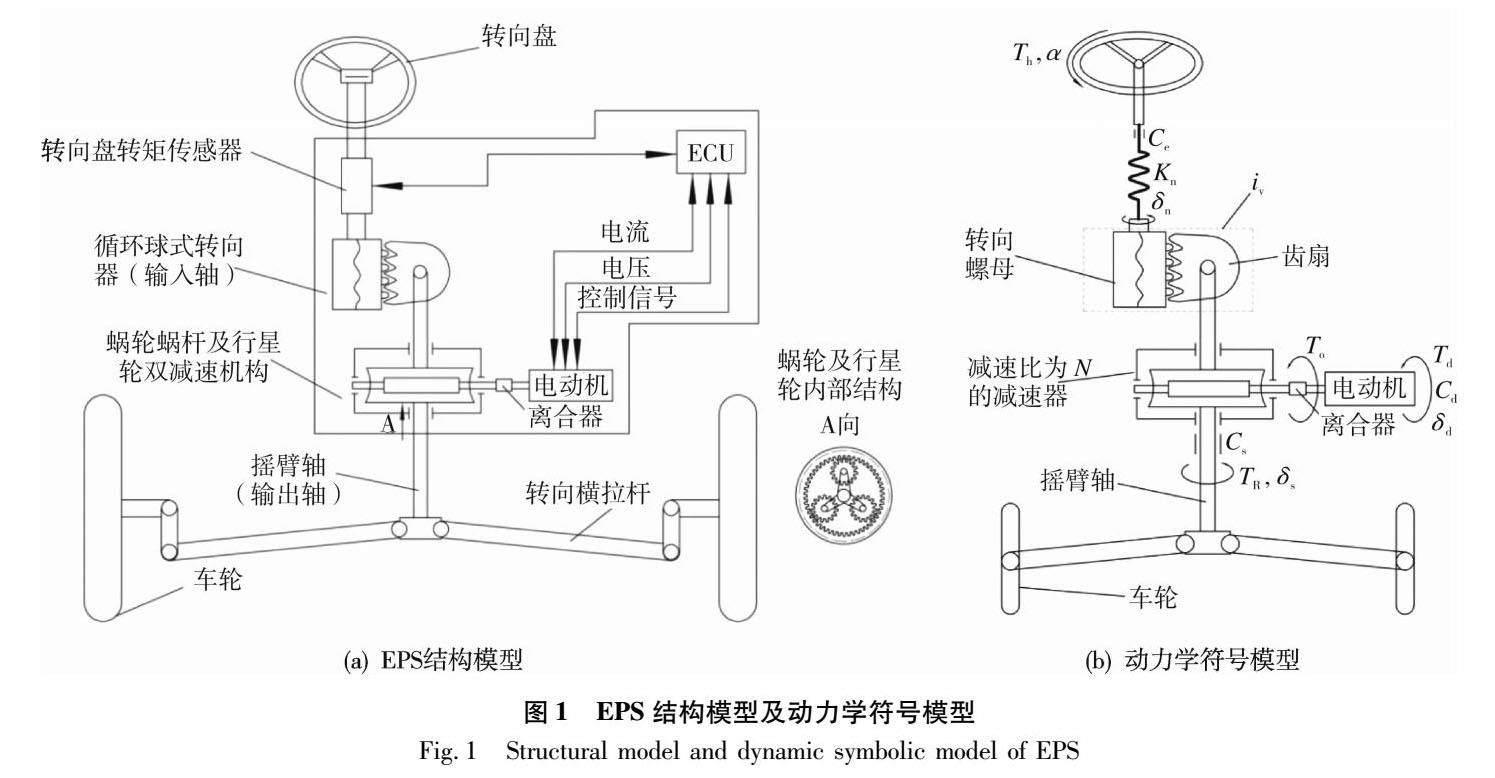
為滿足公共服務(wù)領(lǐng)域的商用新能源客車和大噸位新能源載重汽車的使用要求,設(shè)計了一種創(chuàng)新的搖臂軸助力式循環(huán)球轉(zhuǎn)向器。此轉(zhuǎn)向器的助力機械結(jié)構(gòu)安置在搖臂軸處,助力電機經(jīng)此結(jié)構(gòu)二級減速后對搖臂軸輸出扭矩,完成助力。在轉(zhuǎn)向系統(tǒng)進行助力時,因為是對輸出端(搖臂軸)直接助力,所以經(jīng)過的傳動鏈少,減少了能量的消耗并能提供更大的助力。這種新型搖臂軸助力式EPS系統(tǒng)的結(jié)構(gòu)模型如圖1(a)所示,其動力學(xué)符號模型圖如圖1(b)所示。
3.1無控制下的仿真
在系統(tǒng)處于無控制狀態(tài)時,觀察式(3)中輸入量Th,TR分別為單位階躍信號時的輸出響應(yīng)。在MATLAB/Simulink中建立其動力學(xué)模型并仿真,得到扭矩響應(yīng)結(jié)果如圖3所示。
由圖3可以看出,對階躍輸入,系統(tǒng)在0.2s內(nèi)就能到達平衡狀態(tài),但到達平衡狀態(tài)前的振蕩衰減過程會對車輛轉(zhuǎn)向控制造成一定影響。如扭桿扭矩Tn響應(yīng)曲線表現(xiàn)為高頻低幅振蕩,衰減時間約為0.16s,這將使EPS系統(tǒng)產(chǎn)生異響,轉(zhuǎn)向不平穩(wěn),駕駛員會感到非常不舒服。對于高速運動的車輛轉(zhuǎn)向控制而言,0.2s太久,在各種因素的作用下,系統(tǒng)極有可能會產(chǎn)生滯后和過沖現(xiàn)象,導(dǎo)致車輛在遭遇突發(fā)狀況時的響應(yīng)完全可能耗時更長。因此,這樣的性能表現(xiàn)完全不能滿足EPS系統(tǒng)的快速跟隨性和穩(wěn)定性要求。因此,需要對EPS系統(tǒng)人為施加控制以提升系統(tǒng)品質(zhì)。
3.23種控制律下的仿真
取初始值X=[0.1,0,π,0]T,物理含義為取方向盤轉(zhuǎn)角及角速度分別為0.1rad,πrad/s,取搖臂軸轉(zhuǎn)角及角速度分別為0rad,0rad/s。對式(17)、式(18)兩種指數(shù)趨近律均取ε=diag[10,10],式(17)、式(18)、式(19)3種指數(shù)趨近律均取k=diag[1000,1000],當(dāng)k取此值時,經(jīng)計算得式(19)的ε=diag[0.001,0.001]。再運用MATLAB/Simulink對系統(tǒng)建模并仿真,得到上述3種控制律作用下方向盤轉(zhuǎn)角運動情況和搖臂軸轉(zhuǎn)角、扭桿扭矩對滑模控制下的響應(yīng)仿真結(jié)果如圖4所示。
本文EPS系統(tǒng)中,方向盤轉(zhuǎn)角α對應(yīng)圖4中縱坐標x1,搖臂軸轉(zhuǎn)角δs對應(yīng)圖4中縱坐標x2,扭桿扭矩對應(yīng)圖4中縱坐標Tn。由圖4可以看出,方向盤轉(zhuǎn)角、搖臂軸轉(zhuǎn)角和扭桿扭矩在0.01s內(nèi)均到達平衡狀態(tài)。相比之下,系統(tǒng)平衡后,圖中除代表常用趨近律的黑實線有抖振外,文獻[16]趨近律和優(yōu)化趨近律的藍虛線和黃點線經(jīng)放大后仍觀測不到抖振。
由圖4可知,方向盤轉(zhuǎn)角、搖臂軸轉(zhuǎn)角和扭桿扭矩到達平衡位置后均為零,這說明系統(tǒng)平衡后,方向盤和扭桿回到了同一軸線上,故而扭桿從扭轉(zhuǎn)狀態(tài)回到了非扭轉(zhuǎn)狀態(tài)。因此,轉(zhuǎn)角傳感器和扭矩傳感器的測量均為零,但對于整車車體而言,方向盤實際上轉(zhuǎn)過了相應(yīng)角度。本文EPS系統(tǒng)在3種趨近律作用下,超調(diào)量均很小,幾乎實現(xiàn)了無超調(diào)。其中,使EPS系統(tǒng)接近平衡狀態(tài)最快的是優(yōu)化趨近律。相比之下,優(yōu)化趨近律不僅能夠縮短系統(tǒng)非滑動模態(tài)段的時間,而且能夠比常用趨近律和文獻[16]趨近律獲得更好的動態(tài)品質(zhì),綜合性能最好。
3.3不同ε值下的仿真
同樣取初始值X=[0.1,0,π,0]T,對優(yōu)化趨近律中ε分別取ε=diag[10,10],ε=diag[100,100],ε=diag[1000,1000],k均取k=diag[500,500],運用MATLAB/Simulink對系統(tǒng)建模并仿真。根據(jù)上述3個不同的ε值,得到本文所用指數(shù)趨近律作用下的方向盤轉(zhuǎn)角運動情況和搖臂軸轉(zhuǎn)角、扭桿扭矩對滑模控制下的響應(yīng)仿真結(jié)果如圖5所示。
由圖5可以看出,方向盤轉(zhuǎn)角、搖臂軸轉(zhuǎn)角和扭桿扭矩均能在0.01s內(nèi)到達平衡狀態(tài),且平衡后將圖形放大,觀測到本文EPS系統(tǒng)在3個不同的ε作用下均有抖振,且ε越大抖振越大,觀測到搖臂軸轉(zhuǎn)角和扭桿扭矩出現(xiàn)了明顯超調(diào)。
3.4不同k值下的仿真
同樣取初始值X=[0.1,0,π,0]T,對優(yōu)化趨近律中ε均取ε=diag[10,10],k分別取4個值:k=diag[100,100],k=diag[300,300],k=diag[500,500],k=diag[1000,1000],運用MATLAB/Simulink對系統(tǒng)建模并仿真。根據(jù)上述4個不同的k值,得到優(yōu)化趨近律作用下的方向盤轉(zhuǎn)角運動情況和搖臂軸轉(zhuǎn)角、扭桿扭矩對滑模控制下的響應(yīng)仿真結(jié)果如圖6所示。
由圖6可以看出,當(dāng)取k=diag[500,500]和k=diag[1000,1000]時,方向盤轉(zhuǎn)角、搖臂軸轉(zhuǎn)角和扭桿扭矩均能在0.01s內(nèi)達到平衡狀態(tài);當(dāng)取k=diag[300,300]時,方向盤轉(zhuǎn)角、搖臂軸轉(zhuǎn)角和扭桿扭矩大約在0.04s達到平衡狀態(tài);當(dāng)取k=diag[100,100]時,方向盤轉(zhuǎn)角、搖臂軸轉(zhuǎn)角和扭桿扭矩大約在0.10s達到平衡狀態(tài)。平衡后將圖形放大,觀測到本文EPS系統(tǒng)在4個不同的k作用下均有抖振,且k過大也會導(dǎo)致抖振增大;k越大超調(diào)量越小,到達平衡狀態(tài)時間越短。
3.5系統(tǒng)抖振分析
滑模控制本質(zhì)上是一種不連續(xù)的開關(guān)控制,這種開關(guān)控制的特性使得系統(tǒng)在滑模面(也即平衡狀態(tài))上一定會有抖振發(fā)生。而圖4中優(yōu)化趨近律對應(yīng)的紅虛線曲線明顯沒有抖振產(chǎn)生。因此,將圖4中優(yōu)化趨近律對應(yīng)的紅虛線曲線與圖6中優(yōu)化趨近律對應(yīng)的紅虛線曲線比較,發(fā)現(xiàn)它們僅是系統(tǒng)仿真取樣時間不同,其他并無區(qū)別,故而推斷仿真時間的選取會影響到軟件仿真步長,造成仿真一定程度上失真,從而導(dǎo)致系統(tǒng)無抖振的假象發(fā)生。故在進行系統(tǒng)仿真時,要選取合適的時間和步長。
綜上可知,3種趨近律中,優(yōu)化趨近律控制效果最好,參數(shù)ε和k的值對系統(tǒng)抖振均有影響。按照將系統(tǒng)抖振盡量削弱的原則,可以在取小值ε的同時,盡量取大k值,以減小系統(tǒng)到達平衡狀態(tài)的時間,提高汽車EPS系統(tǒng)跟隨性。優(yōu)化趨近律在給出ε=diag[10,10],k=diag[1000,1000]的情況下,比文獻[4-6]、文獻[8]、文獻[10-11]的控制策略調(diào)整至平衡狀態(tài)的時間分別快0.01,1.99,0.02,0.09,2.99,0.19s,且到達平衡狀態(tài)過程中的動態(tài)品質(zhì)更好。
4結(jié)論
文中給出了一種新型搖臂軸助力式EPS系統(tǒng)的狀態(tài)方程,并將系統(tǒng)二級減速器累積磨損造成的角度間隙作為外界干擾,對此干擾進行正弦化處理。在采用特征向量任置法求出G矩陣后,通過對優(yōu)化趨近律中ε和k的合理取值,可以保證系統(tǒng)快速到達平衡狀態(tài)(跟隨性好),同時又能減小超調(diào)量并有效削弱滑動模態(tài)切換引起的抖振。優(yōu)化趨近律有效、可行,實現(xiàn)了對汽車轉(zhuǎn)向快速跟隨性的控制設(shè)計,驗證了系統(tǒng)對外部擾動的不變性,為EPS轉(zhuǎn)向系統(tǒng)提供了一種新的控制策略。此外,指數(shù)趨近律的形式仍可進一步優(yōu)化,從而使系統(tǒng)獲得更為優(yōu)良的控制效果。
參考文獻
[1]陳強,高天智,何宛芯,等.基于汽車電動助力轉(zhuǎn)向系統(tǒng)的原理研究[J].汽車實用技術(shù),2021,46(16):186-188.
[2]劉榮芬.新能源汽車鋰電池及其技術(shù)發(fā)展探討[J].化工管理,2020,33(14):94-95.
[3]李耀華,范吉康,何杰,等.考慮附著系數(shù)的商用車EPS控制策略[J].重慶理工大學(xué)學(xué)報(自然科學(xué)),2021,35(12):1-9.
[4]商顯赫,林幕義,童亮,等.基于Dspace輕型貨車EPS系統(tǒng)控制策略研究[J].機械設(shè)計與制造,2022,60(2):139-142.
[5]李洪強,孟建兵,曲寶軍,等.基于粒子群算法的EPS系統(tǒng)控制策略(英文)[J].機床與液壓,2019,47(18):39-44.
[6]商顯赫,林幕義,陳勇,等.基于BP神經(jīng)網(wǎng)絡(luò)EPS系統(tǒng)控制策略研究[J].機械設(shè)計與制造,2022,60(3):36-40.
[7]王燮輝,李強,趙璐,等.C-EPS硬件在環(huán)仿真平臺設(shè)計與控制策略驗證[J].浙江科技學(xué)院學(xué)報,2021,33(3):239-247.
[8]孟令廣,牛志剛.城市電動物流車EPS系統(tǒng)模糊PID控制策略研究[J].機械設(shè)計與制造,2018,56(7):33-36.
[9]汪洪波,夏志,胡振國.EPS多模式可拓模糊切換控制研究[J].合肥工業(yè)大學(xué)學(xué)報(自然科學(xué)版),2018,41(8):1084-1092.
[10]翁敬良,嚴運兵.基于操縱穩(wěn)定性的EPS轉(zhuǎn)向系統(tǒng)魯棒控制策略研究[J].武漢科技大學(xué)學(xué)報,2014,37(3):204-209.
[11]趙萬忠,施國標,林逸,等.循環(huán)球式EPS系統(tǒng)助力特性控制策略研究[J].北京理工大學(xué)學(xué)報,2008,46(8):702-705.
[12]晉兵營,聶建軍,施國標.遺傳算法優(yōu)化的EPS系統(tǒng)模糊控制策略研究[J].機械設(shè)計與制造,2010,48(5):91-93.
[13]盛嚴,王超,陳建斌,等.結(jié)構(gòu)滑模控制的一種指數(shù)趨近律方法[J].噪聲與振動控制,2002,22(4):31-34.
[14]姚瓊薈.變結(jié)構(gòu)控制系統(tǒng)[M].重慶:重慶大學(xué)出版社,1997.
[15]BRAHMIB,MOHAMEDHL,ABDELKRIMB,etal.Improvementofslidingmodecontrollerbyusinganewadaptivereachinglaw:Theoryandexperiment[J].ISATransactions,2020,97:261-268.
[16]秦超,高鋒陽,莊圣賢,等.基于一種指數(shù)趨近律的PMSM滑模變結(jié)構(gòu)控制[J].計算機仿真,2013,30(12):306-310.
[17]張嗣瀛,高立群.現(xiàn)代控制理論,第2版[M].北京:清華大學(xué)出版社,2017.
[18]ARNOLDL,SCHMALFUSSB.Lyapunovssecondmethodforrandomdynamicalsystems[J].JournalofDifferentialEquations,2001,177(1):235-265.
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
