船舶柴油機調速系統模糊控制技術
2023-05-04 14:01:18吳麗麗潘光永
艦船科學技術 2023年5期
吳麗麗,潘光永
(1.金華市現代制造與材料高新技術研發中心,浙江 東陽 322100;2.浙江廣廈建設職業技術大學,浙江 東陽 322100)
0 引 言
目前,在船舶的輸電設備中,發電設備普遍使用柴油發動機。柴油發動機由柴油機直接帶動同步發電機進而推動船舶。而艦船交流電的效率主要是由電流和頻率的穩定性體現出來,高頻的穩定性主要是依靠原動機的調制系統。因為船舶動力系統容量一般較小,船用側推裝置等主要電力裝置停止時,就會引起船用電力系統容量出現明顯幅度的變動[1-3]。由于船上的輸電設備負荷的不同,為了能量守恒,汽輪機會出現一定的變動,這種變化是一個電磁變化過程,且相當快速。所以,柴油機的頻率調節在船用動力系統中不能缺少。
通過調節柴油發動機的調壓系統,可以有效控制發電機的運行速度[4-6]。唯有控制了發動機的運行速度后,才能使其保持在一個合理的范圍內,并可以根據發電機的負荷情況自動調整供油量,從而實現最佳性能,提高發動機的效率和可靠性。按照《鋼制海船入級與制造技術規范(2006)》第三篇的9.7.3.1 條所述,為了確保船舶的安全性和可靠性,所有配備發電機的原動機(包括汽油機和車輪機)都必須配備調壓器,這樣以便在突然卸載負荷時,瞬時調節速度不會超過額定運行速度的10%,并讓穩態調節速度也不會超過額定運行速度的5%。因此基于以上標準要求,本文針對船舶柴油機調速系統模糊控制技術展開探討。
1 前饋模糊控制系統的組成和控制原理
1.1 控制系統的組成
如圖1 所示,控制系統由前饋控制器、柴油發動機、反饋控制器、電動執行器等裝置組成。
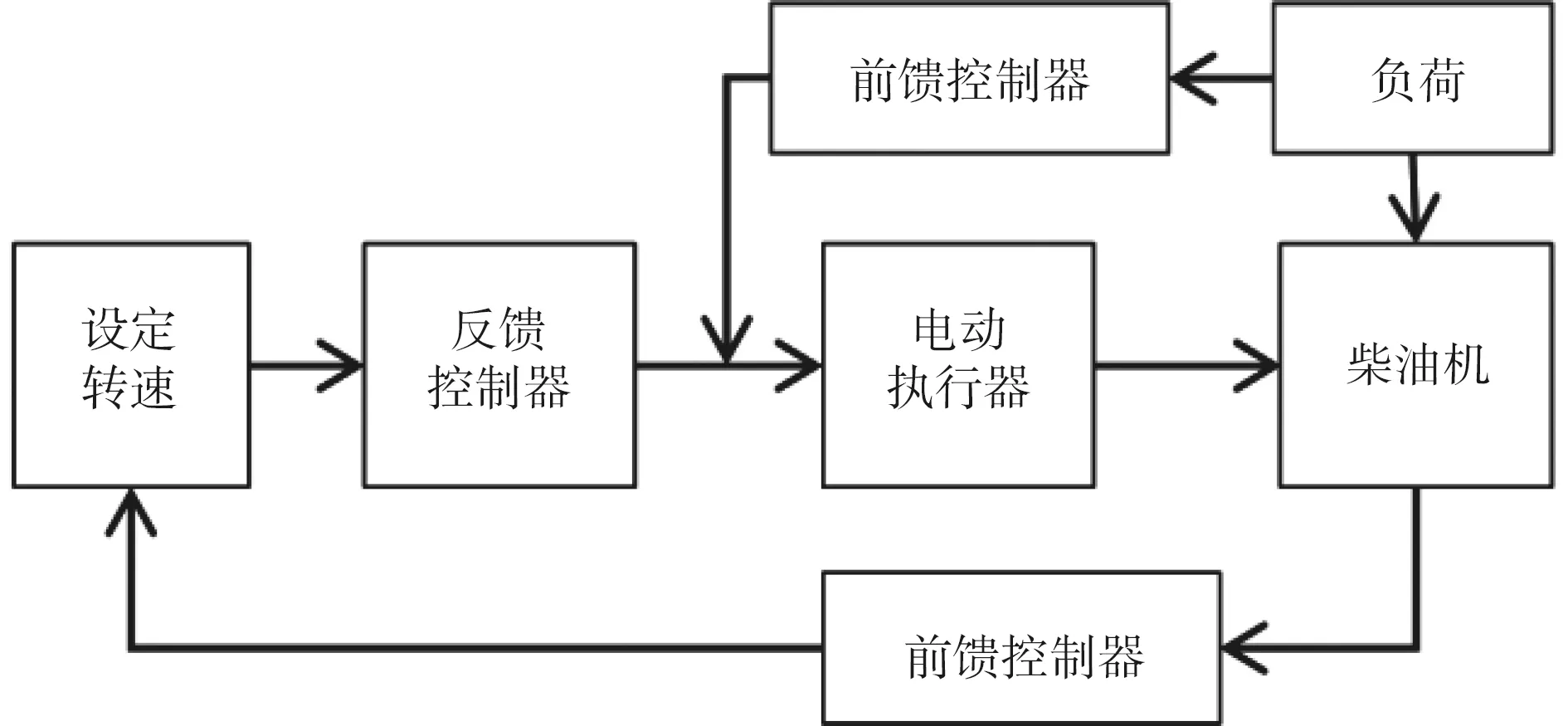
圖1 控制系統的組成Fig.1 Composition of control system
傳統的柴油發動機調速系統依賴于先進的數字控制技術,通過精確的傳感器和智能控制器實現對發動機的精確控制。通過對系統提供的速度參數的分析,汽油發動機將相應的控制信號傳遞至油門閥,從而實現對油門閥齒輪的精確調整,保證對柴油發動機的有效運轉,從而達到穩定的運轉狀態。
一般而言,速度反饋控制是主要的控制電路。目前不管是電子調速器、數碼電調,還是速度反饋控制系統,都普遍應用PID 控制,但這也會使船用柴油發電機組中存在相應問題。如柴油發電機組在運行中面臨可變增益非線性問題。當柴油發動機工作時,其負荷較小。此外,由于船舶柴油發動機控制器的PID 控制參數一般都和標定負荷的參數相對應,所以選擇額定負載的工作點,或是較小區域的工況,其基準效果反而會較好。如果偏離標準規定的額外負荷范圍,則會出現上面所列出的本構或非線條現象,即標準不再可行,并導致標準負載值明顯下降。當動力裝置的輸出功率相對較少時,也會因為某些裝置中大負載的輸出功率大致與發電機的輸出功率相當,造成在啟動或停止這些大負載裝置時,引起發電裝置負載的重大改變。因此,目前關于裝置系統的速度控制,主要采取2 種措施,分別是模糊控制器和PID 控制器。
圖2 為模糊控制器的邏輯推導過程,由于其在系統負載變動幅度更明顯,因此當進入大面積的動態設置時,可以適當地應用模糊控制,并且模仿人的思維和判斷的過程,對系統數學模型參數進行優化控制,具有良好的穩定性。此外這些模糊管理在屬性上,可用于確保系統快速接近穩定狀態的工作點,降低由于柴油機對機組機理造成的影響,從而更準確調節發動機油門程度。不僅提升了柴油利用效果,使控制器更加精確,同時也可以極大提高調速器的速度。
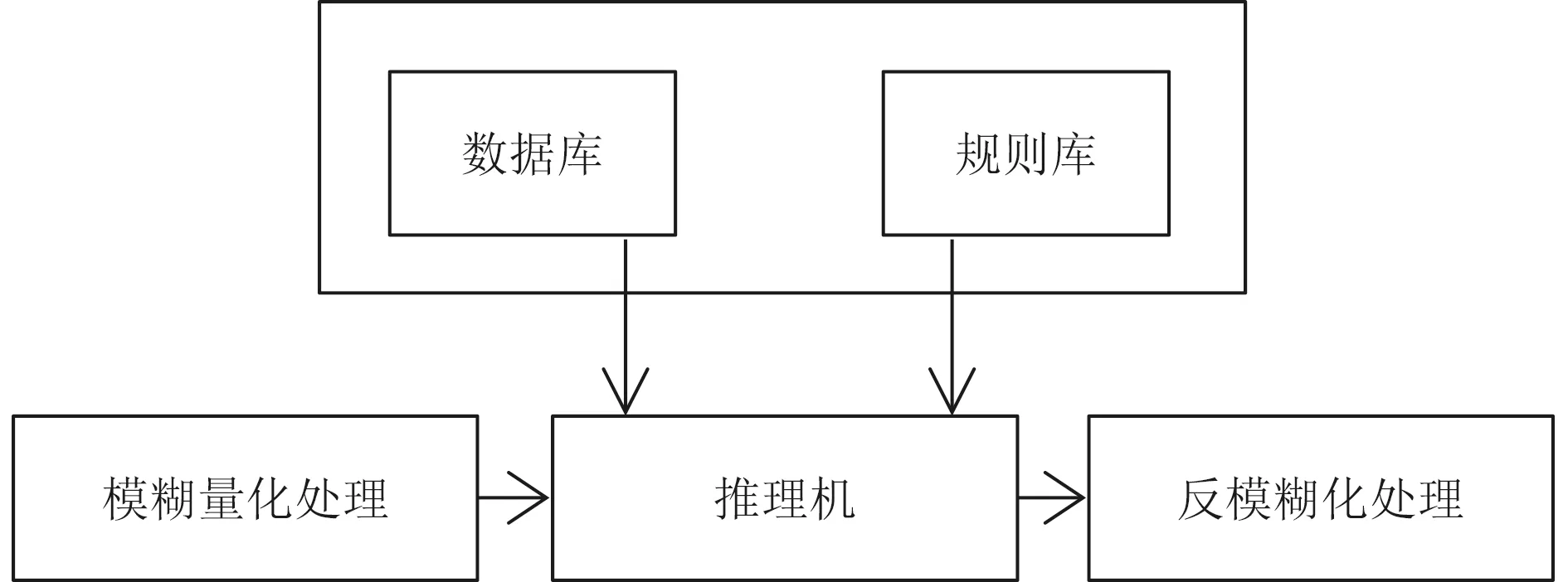
圖2 模糊控制器思維及判斷邏輯Fig.2 Fuzzy controller thinking and judgment logic
1.2 控制系統的原理
前饋控制(干擾補償)是一種基于受控目標參數變化的調節機制,它與反饋控制有本質不同。通過這種調節裝置,可以實時監測負載干擾的變化,一旦發現擾動,就會立即發出變化信號,從而對可調量進行調整,以便在可調量發生偏差之前,將其抵消。由此可見,前饋限制對影響的彌補比反饋限制還要有效。以慣性過程的發動機組合為例,因機組顯示出很大的時間滯后性,而在動力不均衡現象已經發生后,導致其速度不能突變,轉速變化與控制器產生的系統誤差信號也無法及時出現。此外,通過相應的延時,當轉速改變夠大,控制器才可以針對系統誤差進行最大的調節量。故而在發電機組速度控制系統中,由于單純的速度反饋控制系統對負荷的擾動不夠敏感,動作存在著明顯的時間滯后性,這也導致了系統動作誤差無法有效降低,從而延誤了速度控制系統的整個動作調節時機。因此在柴油發動機調速控制器中增加前饋控制器,可以更好應對負荷改變而帶來的功率不均勻,穩定發動機速度。
據此,本文使用圖3 所示的雙入口單出口二維模糊控制器。模糊原理建立在理論研究的基礎上,如圖3流程,由于柴油機組在正常工作中,當負荷變化,輸出一個扭矩,即可對發電機負荷和油閥門系統齒條的位置進行控制,從而得到一定的模糊規律。
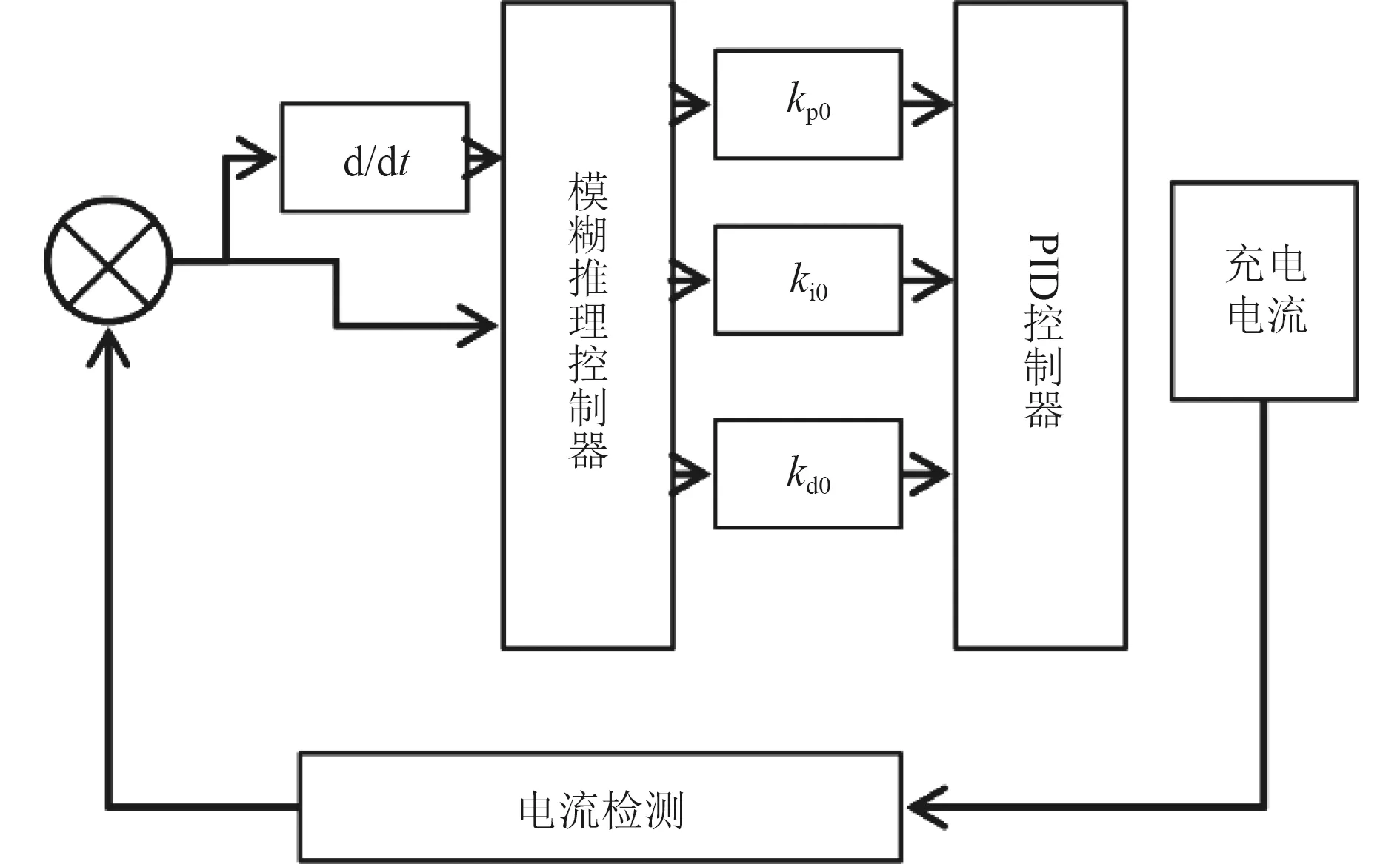
圖3 二維模糊控制器工作原理Fig.3 Working principle of two-dimensional fuzzy controller
需注意的是,如果發電機的電壓是由勵磁裝置保證電壓始終固定,那么有功能量的轉變,就有賴于汽輪機出口電流有功成分的轉變。當負載變動時,壓力轉變量反應最大。本文采用汽輪機出口電流的有功成分及其轉變量當作模糊控制器的信號,就是希望可以利用模糊控制器原理,不經過常規PID 控制器,提早調節柴油的進油閥門及系統齒片的位置,使其發電系統的產生力矩遠小于風阻轉矩,從而實現穩定控制發動機轉速的目標。
本文在模糊控制器結構中引入了模糊控制原理,使用if..and...Then...語句編寫自模糊控制規范。為了更好地解釋,特選擇了模糊前饋控制器的輸入變量i和變量ic來描述發動機出口電流。當機構旋轉時,油門閥的傳動齒條會隨之移動,并通過模糊控制器的輸入信號w,確定油門閥的運行方向。
如果發電機的電流達到IMAX,那么輸入變量i的范圍將被限制在零到I M A X 之間。在[-I M A X,IMAX]范圍內,有許多研究聚焦于輸出變量ic的相關性。ic=ik-ik-1,表示上一次數值與本次數值之間的差異。一般來說,輸出變量w的范圍是[-L,L],其中L為油門閥的位置變化量。
當發動機負荷增加后,發動機的有功電壓增加,此時效應器的控制信號w將加大,即增加了發動機的供油流量,使發動機的轉速更加穩定,負荷增加的越大,效應器的控制信號w也就越大;當發動機負荷減少后,發動機的有功電壓就減少,此時執行機的控制信號w降低,即減少發動機的供油流量,使發動機的工作速度更穩定,而負荷增加的愈小,執行機的控制信號w就愈小。
當系統中存在死區,也就是系統在空載時,由于模煳控制規范的制定依賴于專業人士的經驗,并且在處理死區問題時仍然存在許多技術漏洞,因此,死區情況一般會被標記為“-”。
最終,本文得出了17 條if...and...then...的模糊規則。
2 控制系統的設計與仿真
使用Matlab 軟件進行模擬實驗,并借助Fuzzy 控件構建一個具有模糊前饋功能的發電機控制器,最終把輸入變量i的范圍調整為[0,1],輸入變量ic的范圍調整為[-1,1],而輸出量w的范圍則調整為[-1,1]。
為了保證仿真的準確性以及真實性,船舶柴油機及其仿真速度控制系統采用圖4 所示的結構。由數字仿真設備和物理建模設備組成整個系統,用小型直流電機模擬船舶的柴油機,而船舶柴油發電機由低功率發電機同步展現,負載建模原理類似汽車燈泡建模。
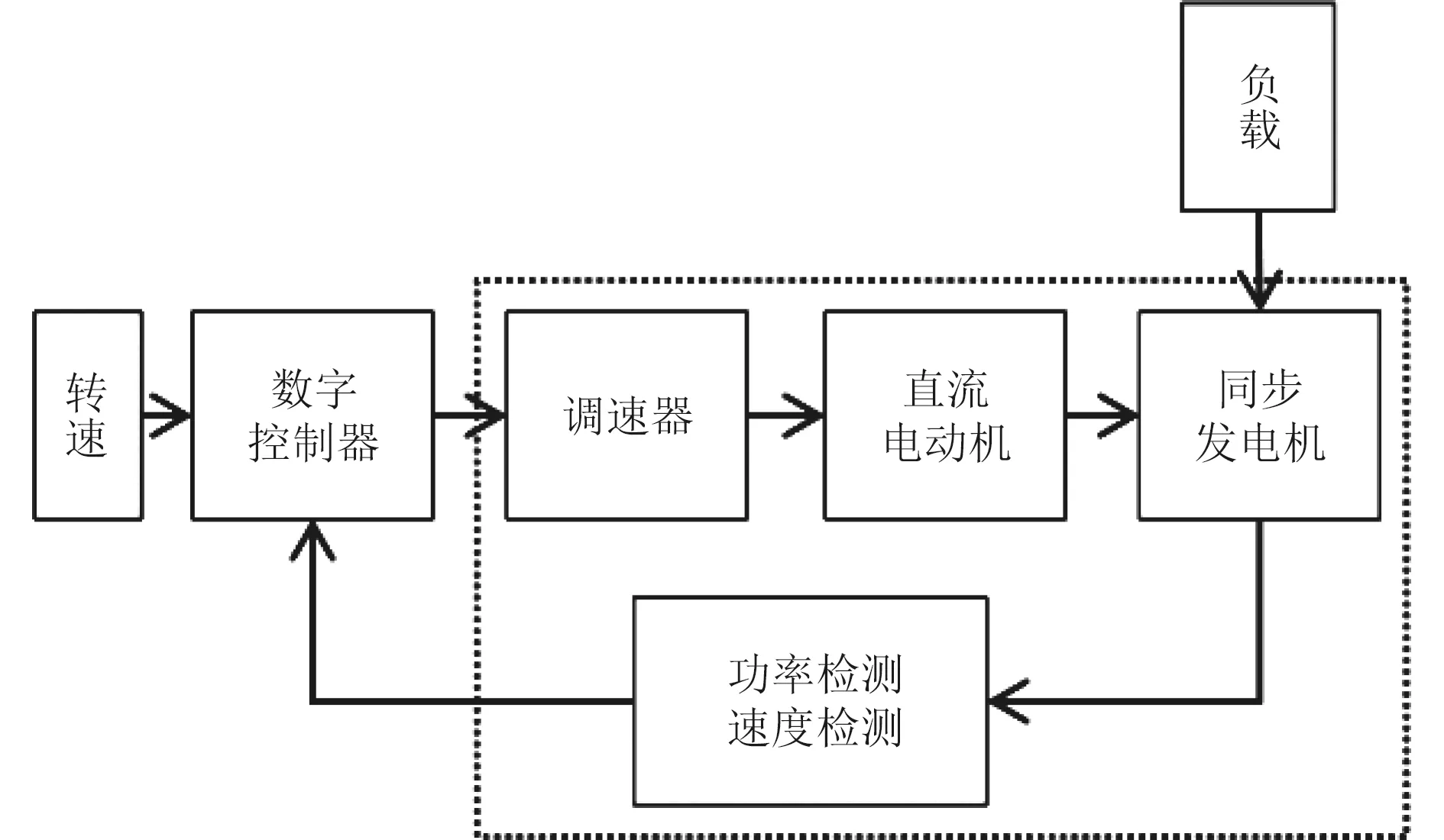
圖4 船用柴油機及其調速系統仿真原理Fig.4 Simulation principle of marine diesel engine and its speed control system
借助數字控制器得出的功率和速度數據,不僅可以直接影響控制器的速度,同時也實現了船舶柴油機在變速器控制下的精準運行。
而在具體的柴油機指示扭矩上,Mi(N·m)為:
式中:Hu為燃油低熱值,J/kg;ni為柴油機的指示熱效率。
本文基于船用柴油機及其調速系統仿真原理,結合柴油機指示熱效率,其特性曲線為:
式中:n0為柴油機最高指示效率點對應的轉速;αt0為過量空氣系數;d為常數。
基于以上結果,得出柴油機機械效率的實驗數據回歸結果:
式中:Ni為柴油機的指示功率,kW。
基于以上結果,得出柴油機的擇氣溫度回歸數據:
最終,在模糊控制技術下得出的船舶柴油機轉速,其方程為:
式中:Me為柴油機的有效輸出扭矩;Ml為阻力矩,N·m。
需要說明的是,在本次計算中,因為特意考慮到了螺旋槳的阻力(如曲軸的傳動機構、減震裝置、推力軸承、飛輪、中間軸及法蘭尾軸、螺旋槳等因素)造成的影響,所以結果顯示,在本次的模糊控制規則設計中,基于FIS 編輯加以推導程序,能夠證明該模糊控制技術的可行性。由此說明,該技術能夠展示應用規范,可以非常直接發現每個輸入集的改變和相應的數據改變,從而對整個系統的輸入規則進一步調整與完善。
3 結 語
與機械和液壓控制器相比,模擬電子控制器在響應速度和控制精準度方面有顯著提高。但是,因為其控制原則都是根據電路的物理結構確定的,所以受可行性研究和繁雜性的影響,無法選擇更加靈活和復雜的規則,也難以再次提升機器性能。而船舶柴油機調速系統采用了微型計算機技術的數字控制器,其控制原理通過軟件實現完成。本文研究通過大量的數據推導,驗證了模糊控制技術在船舶柴油機控制中的可行性,設計了一種充分融合了前饋控制器與反饋控制的混合控制器。該技術不僅可以有效改善調速精度與動態精度,同時也可以有效解決柴油機增益的非線性。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
汽車與新動力(2015年1期)2015-02-27 12:11:01
電力工程技術(2014年1期)2014-03-20 14:19:06
汽車與新動力(2013年5期)2013-03-11 16:08:17
燃氣渦輪試驗與研究(2010年4期)2010-04-16 03:54:22