一種解耦式主動腳輪全向移動機器人的標定方法
2023-05-26 06:23:10邵兵兵葉國云鄭天江許佳杰孫晨陽
寧波大學學報(理工版) 2023年3期
關鍵詞:移動機器人
邵兵兵, 葉國云, 鄭天江, 李 齊, 許佳杰, 孫晨陽
一種解耦式主動腳輪全向移動機器人的標定方法
邵兵兵1,2, 葉國云3, 鄭天江2*, 李 齊2, 許佳杰1,2, 孫晨陽2
(1.寧波大學 信息科學與工程學院, 浙江 寧波 315211; 2.中國科學院 寧波材料技術與工程研究所, 浙江 寧波 315201; 3.寧波如意股份有限公司, 浙江 寧波 315600)
由于機器人的加工制造和裝配等因素引起的幾何參數誤差影響了運動學模型的準確性, 因此會同時降低運動控制和里程計精度. 為提升全向移動機器人的運動精度, 提出了一種針對基于解耦式主動腳輪的全向移動機器人的分步標定方法, 該方法通過限制關節空間運動輸入來簡化運動學矩陣, 并利用最小二乘法獲得運動學參數的實際值, 從而提升運動學模型的精度. 搭建了基于解耦式主動腳輪的全向移動機器人實驗平臺, 并通過仿真和實驗對標定算法進行驗證, 實驗結果顯示在平面內三個自由度上速度控制精度和里程計精度均得到了顯著提升, 證明了標定算法的有效性.
解耦式主動腳輪; 運動學標定; 分步標定; 運動控制; 里程計
全向移動機器人滿足完全約束條件, 具有3個平面自由度, 機動性強, 移動靈活性高, 能夠在平面上實現任意軌跡的運動, 因其獨特的運動優勢近年來被廣泛應用于人類的生產和生活實踐中[1-3]. 全向移動機器人主要有3種驅動輪: 麥克納姆輪因其結構導致運動過程出現磨損和震動, 運動不平穩且效率低下; 球輪結構復雜, 且容易出現打滑; 主動萬向腳輪因其結構優勢, 運行更加平穩、高效, 更能滿足全向移動機器人的運動需求[4-6].
運動的準確性是移動機器人實現路徑規劃、目標識別、同步定位與地圖構建等功能的前提, 而里程計誤差是影響運動精度的關鍵因素[7-8], 所以實現精準的運動控制以及高精度的里程計是十分重要的[9-10]. 在加工、制造和裝配過程中引起的機器人幾何參數名義值與真實值的不同而導致的幾何誤差[11], 對移動機器人的運動控制和里程計精度產生較大影響. 有效地降低里程計誤差, 提高移動機器人運動精度是本文的研究重點.
當機器人在規則、平整、摩擦力足夠的平面運動時, 機器人幾何誤差是里程計誤差的重要來源[12],其中UMBmark方法是著名的兩輪差速移動機器人系統誤差校核方法[13], 國內外學者對其做出了許多應用和改進: Lee等[14]針對汽車式移動機器人改進了UMBmark方法, 通過直線和半圓的回路運動校準誤差, 但沒有考慮誤差之間的耦合; Jung等[15]對UMBmark方法進行了擴展, 提出了一種新的校準方案并考慮了誤差之間的耦合效應, 克服了傳統UMBmark的局限性; 貝旭穎等[16]提出一種新的差速移動機器人幾何誤差校核方法, 綜合考慮了誤差來源, 誤差模型更完善; 達興鵬等[17]利用兩個EKF對里程計系統誤差和激光雷達安裝誤差迭代標定, 使誤差收斂到真值, 但初次迭代的標稱值是帶有誤差的; 盧紀鳳等[18]對差速移動機器人通過UMBmark離線標定和EKF在線標定結合的方式校核系統誤差. 上述學者提出的標定方法雖然不同程度地解決了差動平臺的幾何誤差標定問題, 但對于全向移動機器人的幾何誤差標定研究較少, 且對于解耦式主動腳輪全向移動機器人而言, 其運動學矩陣復雜性更強, 具有更多的運動學參數且相互耦合, 無法應用上述方法解決.
為解決全向移動機器人幾何誤差標定問題, 本文針對基于解耦式主動腳輪的全向移動機器人提出了一種離線的分步標定方法, 通過限制關節空間運動輸入減小耦合, 針對3個自由度參數設定了3種可提高標定精度的參考軌跡, 利用最小二乘法對簡化的運動學矩陣進行線性回歸求解, 然后對運動學模型進行補償, 從而提升運動學模型的準確性.
1 解耦式主動腳輪全向移動機器人運動學分析
本文研究的全向移動機器人由4個具有驅動能力的解耦式主動腳輪驅動, 每個主動腳輪由滾動電機和轉向電機同時驅動[19], 并且對稱地安裝在機器人的4個角上, 如圖1所示.
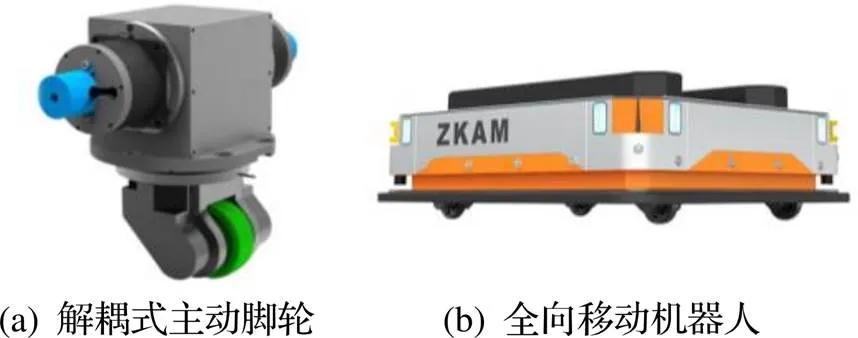
圖1 基于解耦式主動腳輪的全向移動機器人

式中, , 和分別為機器人在基坐標系下沿x軸和y軸方向的速度, 為機器人繞z軸的角速度.
在腳輪坐標系下, 由腳輪的滾動速度和轉向速度融合得到第個腳輪的輪心速度, 根據坐標系間的變換關系, 在基坐標系下表示為

根據輪心速度相等, 聯立式(1)和(2), 可得單個腳輪運動學關系:
式中,

由此可得全向移動機器人的整體運動學模型為
對上式進行分析后發現, 全向移動機器人運動學參數、、之間相互耦合, 其實際值與名義值的不同造成的幾何誤差嚴重影響著運動學矩陣的準確性. 根據全向移動機器人特點, 發現其在平面3個自由度上的運動是獨立的, 因此可以通過分步的方法進行標定. 根據該方法, 設定3種標定軌跡來降低運動學矩陣的耦合度和復雜性, 實現運動學參數的標定, 從而達到提升運動控制和里程計精度的目的.
2 解耦式主動腳輪全向移動機器人標定算法
對于基于解耦式主動腳輪的全向移動機器人, 影響機器人運動的主要幾何誤差來源于腳輪的半徑、腳輪的偏置以及腳輪的安裝點距平臺中心的距離. 平臺共有4個驅動輪, 待確定的運動學參數有12個, 且相互之間存在耦合. 因此針對上述問題, 本文通過限制關節運動輸入減少耦合, 設置了有利于提高標定精度的3種運動軌跡, 利用最小二乘法對簡化的運動學矩陣進行參數辨識[24-25], 進而計算得到運動學參數標定值.
對算法推導、仿真以及實驗中可能出現的參數約定見表1.
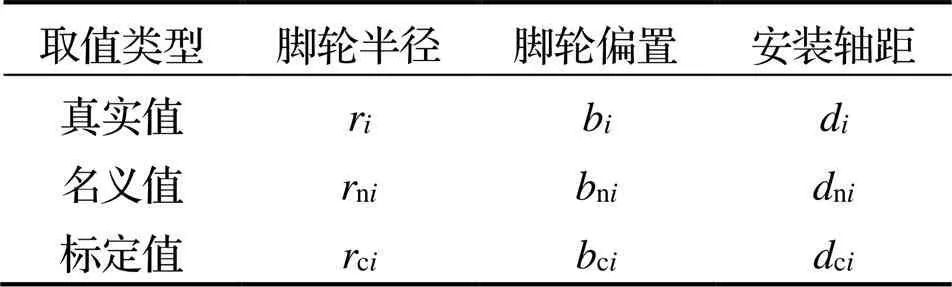
表1 標定參數
注:=1,2,3,4.
2.1 標定r
腳輪的半徑和平臺中心到腳輪的距離與腳輪的滾動運動相關, 且相互耦合. 腳輪的半徑影響著機器人的平移運動, 因此首先協調好腳輪轉角控制機器人進行直線運動, 利用工作空間速度與關節速度的對應關系, 對參數進行標定.

運用最小二乘法對上式運動學矩陣元素進行求解, 求解公式如下:
2.2 標定d
腳輪到平臺中心的距離主要影響機器人的旋轉運動, 協調腳輪轉角, 控制全向移動機器人原地旋轉, 利用關節速度與工作空間速度的對應關系, 對參數進行標定.




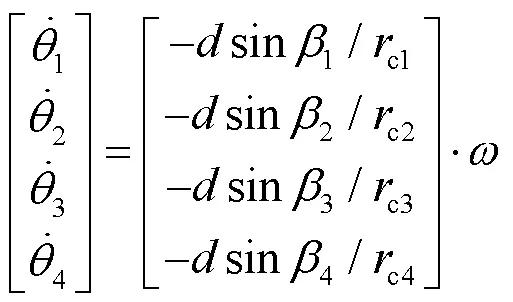
根據最小二乘公式辨識上式運動學矩陣元素, 具體公式如下:

2.3 標定b
腳輪的偏置與腳輪的轉動運動相關, 若腳輪僅進行轉向運動, 則會出現嚴重打滑, 因此設計一種姿態不變的圓形軌跡對參數進行標定.
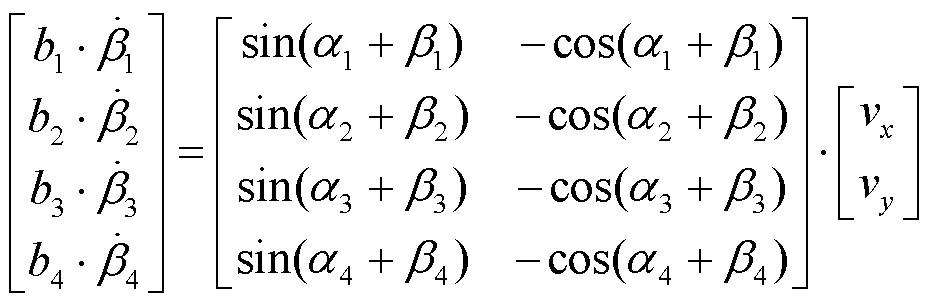
通過最小二乘法對上式參數進行辨識, 求解公式如下:
3 算法仿真
3.1 仿真過程
利用MATLAB等工具對上述全向移動機器人進行仿真實驗.
在仿真環境中, 假設不存在打滑和傳感器誤差等非幾何因素影響, 仿真模型中的運動學參數名義值為: 腳輪半徑=55mm, 腳輪偏置=55mm, 腳輪到平臺的安裝距離=400mm. 給每一個運動學參數乘上一個誤差比例系數, 得到的值作為仿真過程中的真實值, 由真實值計算得到的工作空間速度加入高斯白噪聲, 作為工作空間的真實速度. 算法仿真流程如圖3所示.
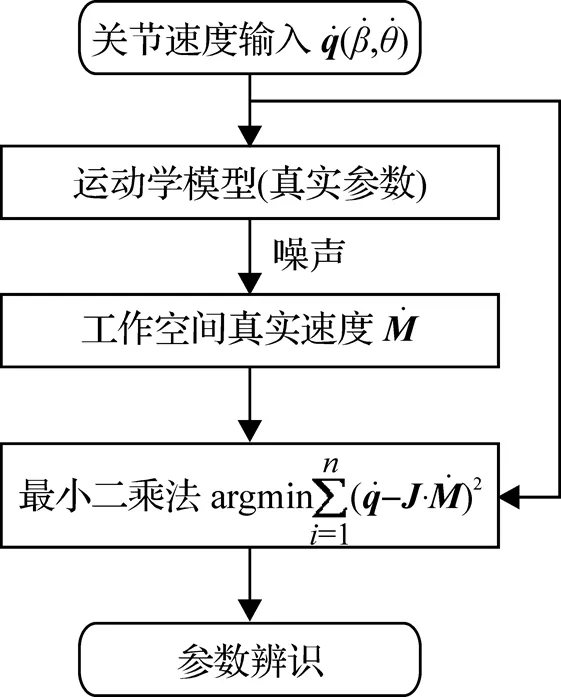
圖3 標定算法仿真流程
3.2 仿真結果分析
對算法仿真的結果進行分析, 機器人的運動學參數名義值(加工制造的標稱值)、真實值與標定值的結果對比情況見表2.
表2中誤差1表示每個運動學參數名義值相對于真實值的差值絕對值, 誤差2表示運用本算法標定后每個運動學參數的標定值相對于真實值的差值絕對值. 通過對比標定前后各參數與真實值的差值可以看出, 標定值更加接近真實值, 證明了標定算法可行性.
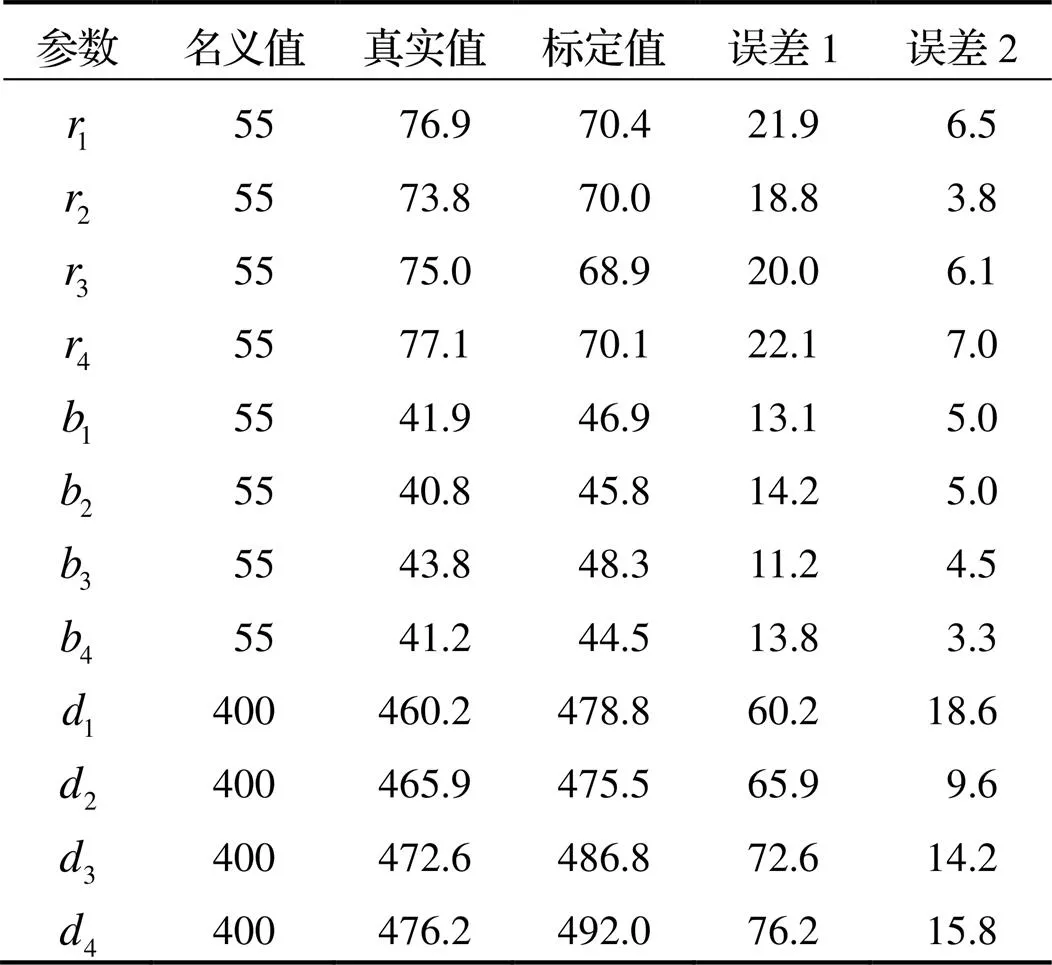
表2 標定參數仿真結果對比 mm
4 實驗驗證
利用解耦式主動腳輪全向移動機器人平臺建立實驗環境, 對標定算法進行驗證, 并從機器人速度控制誤差和里程計誤差兩個方面評價算法的有效性.
實驗環境布置如圖4所示, 實驗設備由激光跟蹤儀(Laser Tracker, LT)、全向移動機器人、上位機組成, 其中激光跟蹤儀用于測量真實速度, 上位機向移動機器人發送命令, 控制全向移動機器人移動, 同時讀取腳輪運動信息.

圖4 實驗平臺
4.1 實驗步驟
將標記小球放置在全向移動機器人中心, 將LT坐標系與全向移動機器人基坐標系進行擬合, 即可測量并計算得到移動機器人在基坐標系下的實際速度.
具體實驗步驟為:
(1)通過上位機向關節空間發送運動命令, 控制移動機器人按照設計的軌跡進行運動;
(2)使用LT測量移動機器人工作空間實際速度, 同時在上位機中采集關節空間數據;
(3)將步驟(2)中計算的標定后的參數重新導入到上位機中;
(4)測量并比較標定前后的速度控制和里程計速度誤差, 驗證標定算法有效性.
4.2 實驗數據分析
實驗在平整、摩擦力足夠的地面進行, 保證機器人平穩運行, 減小非幾何因素影響, 實驗場地足以滿足全向移動機器人的運動. 實驗中LT跟蹤的機器人運動軌跡如圖5所示, 圖中箭頭指向表示機器人運動過程中方向的朝向.
為驗證標定后的運動學參數是否降低了誤差, 定義平均速度誤差, 表示為
分別將標定前后的運動學參數代入平臺正逆運動學進行驗證, 比較標定前后機器人速度控制和機器人里程計的誤差.
工作空間真實速度相對于命令速度的誤差對比結果如圖6所示, 其中(a)~(c)依次為、方向的線速度誤差和角速度誤差. 標定前工作空間的速度控制平均誤差為[0.021 0.024 0.026], 標定后工作空間的速度控制平均誤差為[0.0036 0.0050 0.0041]. 對比以上數據可以發現速度控制誤差在3個自由度上明顯降低, 標定后的運動學參數有效提高了運動學矩陣的準確性, 從而顯著提升了機器人的運動控制精度, 使機器人的運動更加接近真實狀態.
圖7為里程計解算速度相對于真實測量的工作空間速度的誤差, 其中(a)~(c)分別為、方向線速度誤差和角速度誤差. 標定前里程計平均誤差為[0.032 0.029 0.030], 標定后里程計平均誤差為[0.0033 0.0028 0.0067], 里程計誤差在3個自由度上顯著降低. 通過對比分析以上數據發現標定后的運動學參數提高了運動學模型的精度, 同時里程計精度也得到了明顯提升, 可以有效提高機器人定位精度.
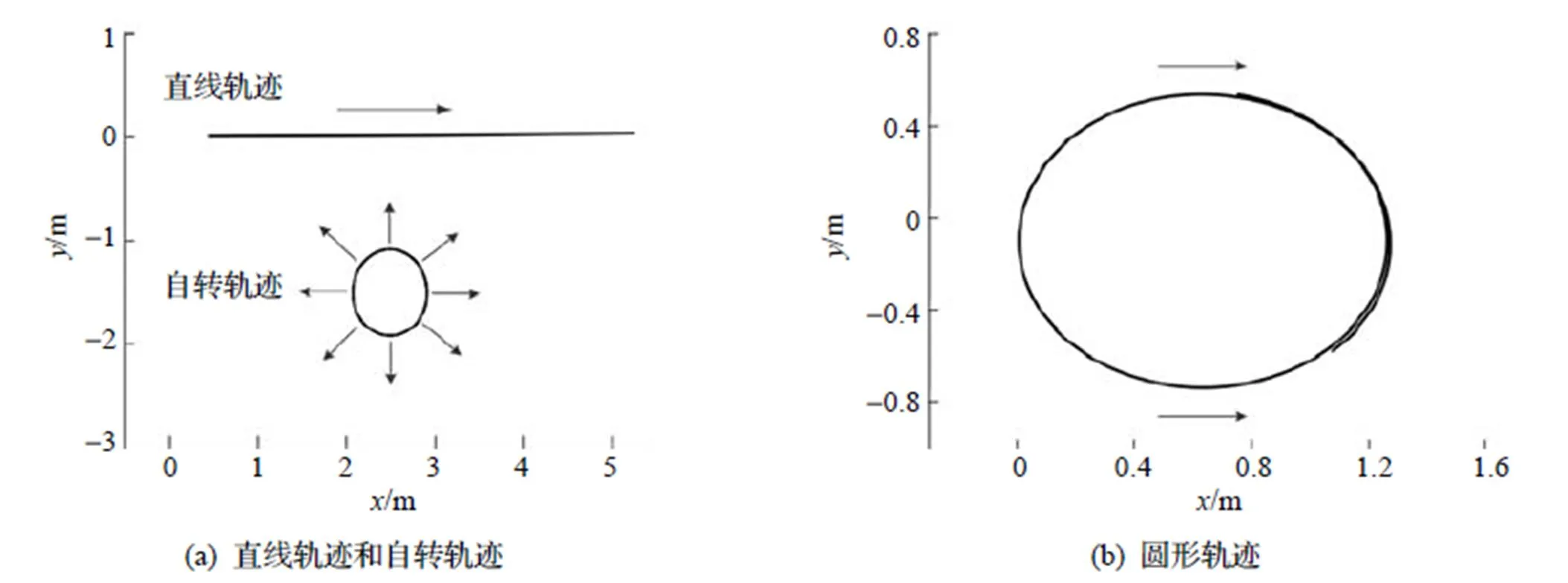
圖5 LT跟蹤的標定軌跡
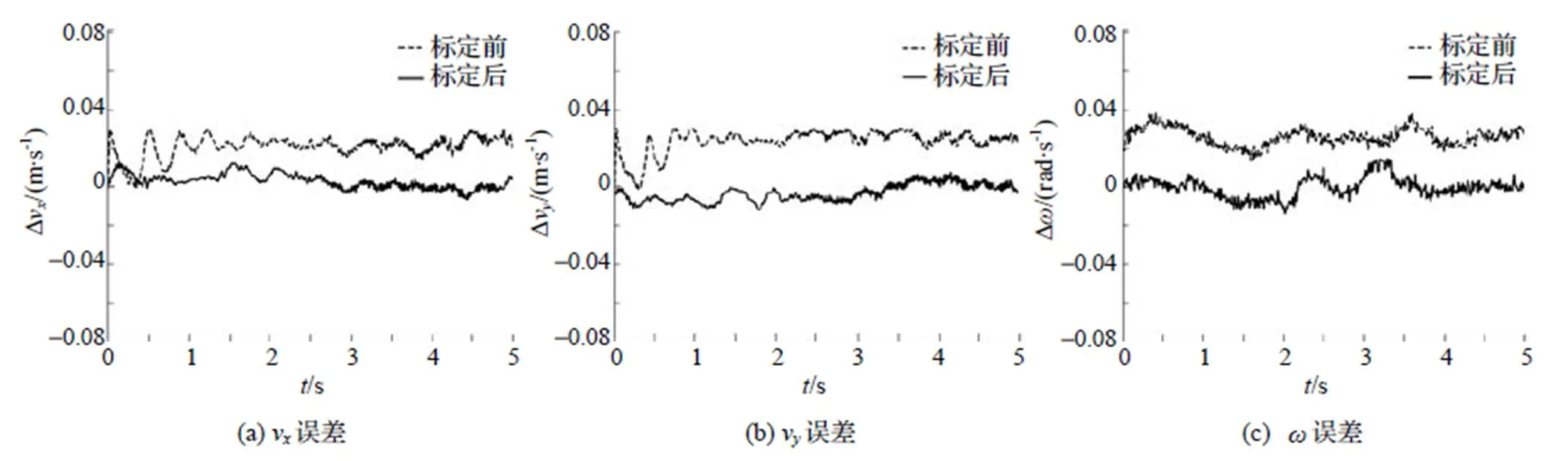
圖6 工作空間速度控制誤差

圖7 里程計速度誤差
5 結論
針對解耦式主動腳輪全向移動機器人運動學模型參數較多且耦合嚴重的問題, 提出了一種幾何誤差標定算法, 該算法通過限制關節空間運動輸入, 分步標定運動學參數. 仿真結果顯示, 標定后的運動學參數更加接近真實值, 運動學模型更加接近真實狀態, 證明了該方法的可行性. 最后, 利用全向移動機器人平臺進行實驗, 對標定算法進行驗證. 實驗結果顯示, 移動機器人的速度控制精度和里程計精度在平面3個方向(、方向的線速度和繞軸的角速度)上均得到了明顯提升, 驗證了方法的有效性. 后續工作將針對移動機器人與地面接觸等不確定因素造成的非幾何誤差進行研究, 進一步提高機器人運動精度.
[1] Yin J, Yang G, Zhao F, et al. Motion planning implemented in ROS for omni-directional wheeled mobile robot[C]//2015 IEEE International Conference on Information and Automation, Lijiang, 2015:2695-2700.
[2] Wang J, Chen J. An adaptive sliding mode controller for four-wheeled omnidirectional mobile robot with input constraints[C]//2019 Chinese Control and Decision Conference (CCDC), Nanchang, 2019:5591-5596.
[3] 曲乃恒, 楊桂林, 鄭天江. 基于解耦式主動萬向腳輪的全向移動機器人設計[J]. 中國機械工程, 2015, 26(19): 2601-2605.
[4] Yang G L, Li Y P, Lim T M, et al. Decoupled powered caster wheel for omnidirectional mobile platforms[C]// 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, 2014:954-959.
[5] Kim D Y, Kim J H, Kim D. Development of an omni-directional mobile base utilizing spherical robots as wheels[C]//2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 2017:370-371.
[6] 李陽, 劉子明, 陳慶盈. 考慮打滑干擾的解耦式主動腳輪全向移動機器人跟蹤控制[J]. 中國機械工程, 2020, 31(18):2247-2253.
[7] Xu H, Collins J J. Estimating the odometry error of a mobile robot by neural networks[C]//2009 International Conference on Machine Learning and Applications, Miami, USA, 2009:378-385.
[8] Tu Y, Min H. Calibration method of mecanum wheeled mobile robot odometer[C]//2019 Chinese Automation Congress (CAC), Hangzhou, 2019:3014-3019.
[9] Seong J, Jung D, Chung W. Odometry calibration for car-like mobile robots[C]//2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 2017:889-890.
[10] Fazekas M, Gáspár P, Németh B. Improving the wheel odometry calibration of self-driving vehicles via detection of faulty segments[C]//2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 2021:144-150.
[11] 王衛華, 熊有倫, 孫容磊. 測程法系統誤差的測量與校核[J]. 機器人, 2004, 26(5):454-460.
[12] 張勝賓, 趙祚喜. 基于UMBmark算法的移動機器人定位試驗研究[J]. 現代電子技術, 2018, 41(3):80-83; 87.
[13] Borenstein J, Feng L. Measurement and correction of systematic odometry errors in mobile robots[C]//IEEE Transactions on Robotics and Automation, IEEE, 1996: 869-880.
[14] Lee K, Chung W. Calibration of kinematic parameters of a car-like mobile robot to improve odometry accuracy [C]//2008 IEEE International Conference on Robotics and Automation, Pasadena, USA, 2008:2546-2551.
[15] Jung C, Chung W. Accurate calibration of two wheel differential mobile robots by using experimental heading errors[C]//2012 IEEE International Conference on Robotics and Automation, Saint Paul, USA, 2012:4533- 4538.
[16] 貝旭穎, 平雪良, 高文研. 輪式移動機器人里程計系統誤差校核[J]. 計算機應用研究, 2018, 35(9):2696-2699; 2703.
[17] 達興鵬, 曹其新, 王雯珊. 移動機器人里程計系統誤差及激光雷達安裝誤差在線標定[J]. 機器人, 2017, 39(2): 205-213.
[18] 盧紀鳳, 羅磊, 時輪. 基于UMBmark和EKF的差速移動機器人傳感器系統誤差標定方法[J]. 機械設計與研究, 2020, 36(4):149-153; 165.
[19] 王健. 主動腳輪式全向移動機器人的動力學解耦分析[J]. 機電信息, 2017(21):120-121.
[20] Afaghani A Y, Yuta S, Lee J H. Jacobian-matrix-based motion control of an omni-directional mobile robot with three active casters[C]//2011 IEEE/SICE International Symposium on System Integration (SII), Kyoto, Japans, 2011:627-633.
[21] Jia W, Yang G, Gu L, et al. Dynamics modelling of a mobile manipulator with powered castor wheels[C]//2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, 2017:730-735.
[22] Zheng T, Zhang J, Wang W, et al. Design and control of two degree of freedom powered caster wheels based omni-directional robot[M]//Recent Advances in Intelligent Manufacturing, Singapore: Springer, 2018:568-580.
[23] Oetomo D, Li Y P, Ang M H. Omnidirectional mobile robots with powered caster wheels: design guidelines from kinematic isotropy analysis[C]//2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, Canada, 2005:3034-3039.
[24] Lin P, Liu D, Yang D, et al. Calibration for odometry of omnidirectional mobile robots based on kinematic correction[C]//2019 14th International Conference on Computer Science & Education (ICCSE), Toronto, Canada, 2019:139-144.
[25] Fazekas M, Gáspár P, Németh B. Parameter identification of the nonlinear wheel odometry model with batch least squares method[C]//2021 5th International Conference on Control and Fault-Tolerant Systems (SysTol), Saint- Raphael, France, 2021:360-365.
A calibration method for omnidirectional mobile robot based on decoupled powered caster wheels
SHAO Bingbing1,2, YE Guoyun3, ZHENG Tianjiang2*, LI Qi2, XU Jiajie1,2, SUN Chenyang2
( 1.Faculty of Electrical Engineering and Computer Science, Ningbo University, Ningbo 315211, China; 2.Ningbo Institute of Materials Technology & Engineering, Chinese Academy of Sciences, Ningbo 315201, China; 3.Ningbo Ruyi Co., Ltd., Ningbo 315600, China )
The accuracy of the kinematic model is affected by the error of geometric parameters caused by the machining and assembly of the robot, causing decline of the accuracy of the motion control and the odometry. In order to improve the motion accuracy of the omnidirectional mobile robot (OMR), a step-by-step calibration method is proposed for an omnidirectional mobile robot based on decoupled powered caster wheels (DPCW). This method simplifies the kinematic matrix by limiting the input of motion in joint space. Then the least squares method is used to obtain actual values of kinematic parameters. As a result, the precision of the kinematic model is improved. The experimental platform for the OMR based on DPCW is built, and the calibration algorithm is verified by simulation and experiment. The results show that the accuracies of both velocity control and odometry are significantly improved in three degrees of freedom in the plane, which proves the effectiveness of the calibration algorithm.
decoupled powered caster; kinematic calibration; step-by-step calibration; motion control; odometry
TP242.2
A
1001-5132(2023)03-0022-07
2022?10?11.
寧波大學學報(理工版)網址: http://journallg.nbu.edu.cn/
國家自然科學基金(U1509202); 浙江省自然科學基金(LD22E050007); 寧波市“科技創新2025”重大專項(2018B10069, 2021Z068, 2021Z020); 浙江省機器人與智能制造裝備技術重點實驗室(2015E10011).
邵兵兵(1997-), 男, 安徽亳州人, 在讀碩士研究生, 主要研究方向: 移動機器人誤差標定. E-mail: shaobingbing@nimte.ac.cn
通信作者:鄭天江(1984-), 男, 湖南永州人, 高級工程師, 主要研究方向: 移動、軟體機器人建模仿真及控制. E-mail: zhengtianjiang@nimte.ac.cn
(責任編輯 韓 超)
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19