考慮穩定性約束的智能車輛切換控制方法*
2023-05-29 09:59:38徐明帆白光宇董明明秦也辰
汽車工程 2023年5期
關鍵詞:模型
張 鈺,徐明帆,白光宇,董明明,高 利,秦也辰
(北京理工大學機械與車輛學院,北京 100081)
前言
先進駕駛輔助系統(advanced driving assistance system,ADAS)廣泛應用于智能車輛,在保障車輛安全性、穩定性以及減輕駕駛員負荷等方面具有重要作用[1]。在緊急工況下,智能車輛通過協同及切換不同的ADAS 子系統,如自動緊急制動系統[2]、主動前輪轉向系統[3]和車身電子穩定系統[4]等,實現車輛行車安全提升。然而,由于車輛的橫縱垂動力學特性相互耦合,執行器模塊在車輛行駛過程中相互制約、相互影響[5],導致子系統在切換過程中,對應的不同控制器優化目標易產生矛盾和干涉[6]。為了實現多行駛目標間的切換,模糊方法被用來自適應調整模型預測控制中目標函數的權重[7],實現不同工況下的控制參數匹配,但此類方法在求解過程中未考慮不同行駛條件下的約束條件,且易出現不可解的情況。為獲取不同工況下的多目標控制的最優可行解,Pareto 優化方法和遺傳算法被用來離線計算最優權重后,依據行駛工況查表使用[8],然而,該方法無法實時地應用于復雜工況下的車輛控制。因此,緊急工況下車輛正常行駛需求與主動安全功能間的高效、穩定切換是進一步提升智能車輛行車安全、實現多目標行駛要求的必要前提與核心關鍵。
針對智能車輛的行車安全目標,如何實現在自車穩定行駛下的主動避撞是其首要任務,尤其是主動躲避其他車道無意圖切入車輛引發的碰撞[9],更是進一步提升道路交通安全的重要途徑[10]。針對碰撞風險評估方法,人工勢場法[11]常被用來計算車輛行駛環境風險以避免碰撞;另外,安全距離模型[12]和碰撞不確定性模型[13]被用來考慮前方切入車輛所帶來的碰撞風險;基于數據驅動的方法也被用來預測前方車輛的切入行為[14]。但是,上述方法并未解決其他車道不同方向切入車輛的避撞及其與多車環境下的跟馳、換道等正常行駛目標之間的協同實現。因此,如何量化不同車道多方向切入車輛的碰撞風險以及主動躲避其引發的碰撞是進一步增強當前智能車輛主動避撞功能的關鍵技術,也是緊急工況下智能車輛安全性和多目標行駛要求高效、穩定切換的必要保障。
針對以上問題,本文提出了智能車輛多目標切換的控制方法(intelligent vehicle multi-objective switching control,MoSC),在滿足車輛穩定性約束下保障主動避撞這一首要目標的同時,協同實現其它行駛需求。為說明行駛過程中的多目標需求、切換過程以及算法效果,本文以自適應巡航控制(adaptive cruise control,ACC)作為行駛基準條件,研究智能車輛在考慮行駛穩定性和橫向穩定性約束時的跟馳與主動避撞過程中的多目標切換問題,保障智能車輛正常跟馳、主動避撞的行駛需求。MoSC構建上層規劃-底層作動控制的分層控制架構,上層規劃器集成縱向、橫向動力學、運動學以及非線性輪胎力模型,在橫向穩定性約束下設計多目標優化函數;底層控制器考慮最大路面附著力,利用2 階滑模控制方法維持車輛的行駛穩定性。為實現多目標切換,基于行駛過程中所有車輛的狀態,MoSC 設計基于事件觸發的兩級距碰撞時間(dual-time to collision,DTTC)計算方法,并基于DTTC 設計目標切換機制,使得車輛能夠在正常行駛和避撞功能間切換。本文通過加速、減速以及轉向的多執行器協調控制保障車輛的跟馳和避撞功能,并針對切換過程進行控制系統穩定性證明。本文的主要創新點如下:
(1)提出了多控制目標集成的控制架構,架構上層規劃器考慮橫向穩定性約束,底層控制器增強行駛穩定性,通過執行器子系統的協調控制,滿足車輛安全、穩定等多目標行駛需求。
(2)設計了目標切換機制,該機制基于事件觸發的DTTC 計算結果,可滿足車輛在跟馳和避撞功能間切換,使得車輛能夠避免與其他車道不同方向切入車輛的碰撞,同時進行了控制系統穩定性證明。
(3)搭建了多車試驗平臺,充分考慮多車行駛過程中帶來的不確定性,驗證了MoSC 的有效性和實時性。
1 MoSC所需模型建立
1.1 橫向動力學模型
雙軌車輛橫向動力學模型如圖1所示。
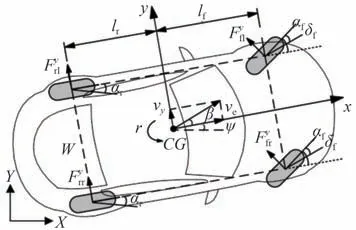
圖1 車輛橫向動力學模型
車輛橫向動力學表示為
式中:m和Iz為車輛質量和轉動慣量為車輛不同位置的橫向輪胎力,其中,ij=fl,fr,rl,rr分別表示車輛左前、右前、左后和右后車輪位置;δf為前輪轉角;lf、lr和W分別表示車輛前軸、后軸到車輛質心的距離以及車輛的輪距;ve、vy和r分別表示質心處的縱向速度、橫向速度和橫擺角速度。為精確描述輪胎的非線性特性,本文采用LuGre輪胎模型表示輪胎橫向力[15]:
式中:μ代表路面附著系數;ζij(αi)為摩擦瞬態方程;αi表示前、后輪胎的側偏角度;Re表示輪胎滾動半徑;vij、ωij和分別表示各車輪輪心速度、轉速和垂向載荷;ε=κμ/σ0y,其中κ為載荷分布因子,σ0y和σ2y分別表示橡膠剛度和相對黏性阻尼。αf和αr分別通過下式計算:
式中:Kd=1、Td=0.1 s和s分別表示轉向系統增益、時間常數和Laplace 算子;δdes為上層規劃器所計算的期望前輪轉角。
1.2 縱向動力學模型
本文基于分布式驅動車輛底盤說明所提出算法,每個輪胎的動力學模型為
式中:Iw表示輪胎轉動慣量表示每個輪胎的旋轉角加速度;dij表示由于模型不確定性所引起的擾動;Tij為每個輪胎的作動力矩為縱向輪胎力,基于輪胎垂向載荷和Burckhardt 路面-輪胎力的描述模型[16],可由式(6)求得。
式中:λij表示每個輪胎滑移率;c1,ij、c2,ij、c3,ij是基于路面條件通過粒子群優化方法所估計的物理參數[17]。
1.3 ACC模型
在ACC 中,兩車之間跟馳的期望間距表示為dr_des=tpve+rs,其中,tp=2.5 s 和rs=3 m 分別表示時間間隔和最小跟馳距離[18]。車輛加速度ae與期望的加速度輸入ae_des之間的關系由1 階慣性方程表示為:
式中Kr=1 和Tr=0.45 s 是系統增益和時間常數。定義期望距離誤差為Δd=dr-dr_des,相對速度為vr=vp-ve,其中dr是兩車實際間距,vp表示前車速度,結合式(7),ACC模型定義為
式中ap為前車加速度。
2 MoSC架構設計
MoSC 的架構如圖2 所示,包含了分層控制架構和目標切換機制。MoSC 基于多車行駛狀態觸發DTTC 計算,根據DTTC 的計算結果,切換模型預測控制目標函數及約束條件,為底層控制器生成不同目標下的期望加速度和期望前輪轉角。底層控制器依據上層期望加速度結果,采用二次優化方法計算最優縱向輪胎力,并利用超扭轉滑模方法計算每個輪胎的驅動/制動力矩。
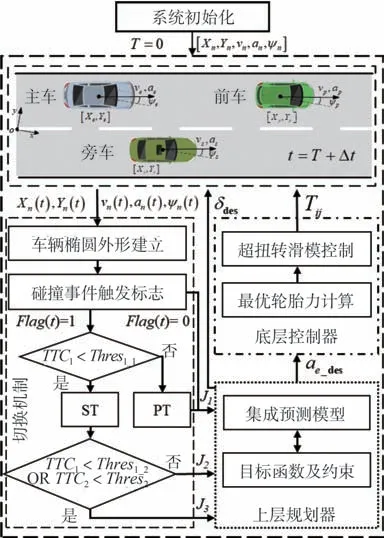
圖2 MoSC框架
2.1 預測模型建立
用于上層規劃器中的預測模型由式(1)~式(5)和式(7)~式(10)組成,表示為Cx。其中系統矩陣見附錄A。輸入為u=[ae_desδdesρ1ρ2]T,其中ρ1和ρ2為松弛因子[19]。狀態變量選取
擾動變量為v=[ap ky ζv ζr]T,輸出變量y=[Δd vr Y ψ]T可由傳感器直接測量得到。預測模型進行離散后可得到:
2.2 上層規劃器以及多目標切換機制設計
MoSC根據控制目標不同,上層規劃器共包含兩種模式:性能模式(performance-oriented target,PT)和安全模式(safety-oriented target,ST),通過3 類目標函數和狀態約束的切換,滿足多目標控制需求。
2.2.1 基于事件觸發的TTC量化計算
針對面向多方向來車的避撞性能不足問題,須量化由不同方向切入車輛所帶來的碰撞風險。與文獻[19]類似,本文采用了基于橢圓車輛幾何外形的方法對碰撞時間和碰撞點進行量化計算。如圖3(a)所示,車輛的長度和寬度可用來形成橢圓幾何外形,n∈{e,p,s}分別代表本車、前車和旁車。碰撞點的計算方法如圖3(b)所示,基于每輛車的坐標(Xn,Yn)、航向角ψn和速度vn,計算不同橢圓間的交點,定義為潛在碰撞點Sc,由當前位置計算到達碰撞點的時間,即距碰撞時間(time-to-collision,TTC);當前位置與碰撞點的距離定義為潛在碰撞點距離G。由此,可得到不同方向車輛的具體碰撞位置和碰撞時間從而量化碰撞風險。由兩級TTC共同組成DTTC,分別為主車與旁車的碰撞時間TTC1,主車與前車的碰撞時間TTC2,為保障本車對不同方向接近的旁車的避撞性能,TTC1的閾值設置為Thres1_1和Thres1_2,由此分別觸發加/減速和轉向實現避撞;TTC2對應閾值為Thres2。

圖3 TTC量化計算示意圖
為了提升風險量化方法的計算效率,提出了基于事件觸發的DTTC 計算方法,即基于本車狀態,當兩車之間的橫向距離(閾值YLat=2 m)、航向角差值在一定觸發范圍內(觸發范圍ψHeT∈[10°,180°])時,則激活DTTC,否則不激活。考慮兩車橫向距離、航向角及相應的觸發范圍,事件觸發的邏輯如表1所示。
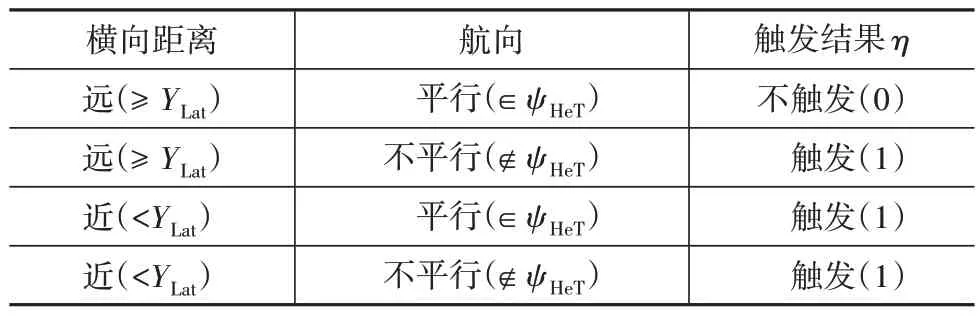
表1 事件觸發邏輯表
根據表1,橫向距離依據每輛車的橫向坐標Yn來計算,由此得到橫向距離標志函數為
當橫向距離小于YLaT時,YFlag=0;當橫向距離大于YLaT時,YFlag=1。
依據每輛車的航向角ψn計算兩車間的碰撞夾角ψα,可得ψα=sgn(Ys-Ye) ·(ψe-ψs)。因此,航向角差的標志函數為
當航向角差在觸發范圍ψHeT內時,ψFlag=1;未在觸發范圍內時,ψFlag=0。定義CFlag=YFlag·ψFlag,根據兩個因素設計事件觸發的函數為
該函數表明,當兩車橫向距離較大并且航向平行時,η=0;當兩車距離很近或者航向存在夾角時,η=1,則開啟DTTC 計算,防止在行駛過程中由于橢圓間不存在交點而繼續計算從而占用計算資源影響控制器的實時性。
2.2.2 PT目標函數及約束設計
當行駛過程中DTTC 的結果均未大于相應閾值時,PT 為當前車輛控制目標,因此車輛保持跟馳。上層規劃器根據跟馳距離、相對速度和本車加速度計算期望加速度,相應目標函數設計為
式中:對角矩陣Q1、P1和H1分別為每項的權重,利用試錯法調整權重;up代表了上一時刻的優化結果。車輛跟馳過程中,為了更合理地利用跟馳距離dr和跟馳速度vr,引入松弛因子對跟馳過程中的狀態約束進行修正。設Γ=[dr vr]T,松弛變量為Θ(k)=ρu(k) ≥0,其中ρ=[02×2I2×2]。則跟馳距離和速度的約束描述為:K|x(k)|≤Γ+Θ(k),其中K=[K102×6],而在每一時間步內,期望加速度與前輪轉角控制序列由FORCESPRO[20]求解器優化得到:
式中:ul、uu、xl和xu分別表示輸入和狀態的上下邊界;xˇ為處于最大預測時域Np時的穩態點。獲取當前時刻的最優控制序列后,控制序列長度Nc中的第一項作為最優結果u輸入至系統。
2.2.3 ST目標函數及約束設計
當旁車由不同方向逐漸接近主車時,觸發DTTC計算,并依據計算結果切換至車輛縱向控制或主動轉向方式實現主動避撞。當TTC1<Thres1_1時,車輛切換至ST,此時主車需通過縱向控制增加其與旁車的碰撞距離。因此,目標函數J2設計為
式中第1 項為exp(-G)的仿射近似變換,用于表示兩車潛在碰撞點間的間距,其權重為N2。J2保障了主車利用縱向間距實現避撞,在求解J2時的約束與J1約束類似,但是J2約束增加了主車與前車的最小距離,防止主車由于加速躲避旁車碰撞而追尾。然而,當車輛由前方或者側方切入時,縱向距離不足以實現避撞,即當TTC1<Thres1_2或者TTC2<Thres2時,主車應采用主動轉向的形式實現換道避撞。因此,J3設計為
在主動轉向的過程中,期望前輪轉角與潛在碰撞點距離G有關,因此前輪轉角會隨著G的不同計算出不同工況下的最優前輪轉角,有效增大本車和旁車碰撞點距離。為了保障車輛橫向穩定性,將穩定性約束加入至各目標函數優化過程中。該約束由橫擺角速度和橫向速度的上下邊界形成的區域共同構成。
根據圖4 中相平面的穩定邊界[21],將橫擺角速度和橫向速度的約束定義為
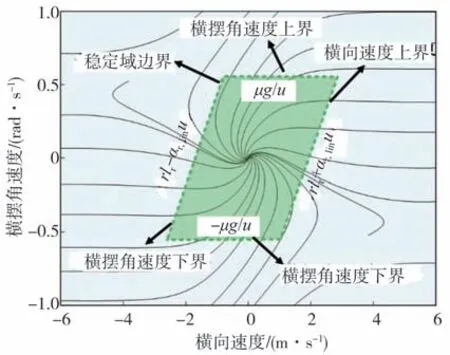
圖4 穩定性邊界表征
式中αr,lin為后輪側偏角的線性區域范圍。
2.2.4 多目標切換機制的穩定性證明
表明目標函數形成的Lyapunov 函數遞減。綜上,穩態點在MPC 控制框架及多個目標函數切換下是漸近穩定的。
2.3 底層控制器
底層控制器利用超扭轉滑模控制(super twisting sliding mode control,STSMC)生成車輪的驅動力矩跟蹤上層期望加速度,并且補償附加橫擺力矩,維持車輛行駛穩定性。
2.3.1 縱向輪胎力優化方法
車輛行駛過程中,輪胎的縱向力不僅需要跟蹤期望加速度,還需要補償產生的附加橫擺力矩。由于車輛在行駛過程中,過小的橫擺角加速度會導致附加橫擺力矩的計算出現偏差,因此,總附加橫擺力矩采用前饋-反饋方法進行計算,即以橫擺角加速度為前饋,橫擺角速度r為反饋。
2.3.2 STSMC
STSMC 利用了2 階滑模控制方法,可有效消除振顫,保障各車輪輪速在有限時間內快速收斂至期望值。定義滑模面為
式中:1 -2η+κ=0,1 >η≥0.5;φij和βij為非負的增益系數。
3 MoSC驗證
3.1 試驗平臺介紹
本文采用了多車試驗平臺驗證MoSC 的有效性和實時性,平臺架構如圖5所示。

圖5 多車試驗平臺
多車試驗平臺包含3 輛線控底盤,每輛底盤的定位采用基于RTK 的GNSS 系統,主車通過實時目標機中的CAN 通信實現轉向、驅動及制動等控制。前車和旁車分別由單獨控制器實現運動操縱。多車試驗平臺中車輛與控制器的參數如表2所示。
表2 控制器參數表
3.2 基于多車試驗平臺的算法驗證
3.2.1 自適應巡航控制
主車在干燥路面上跟馳前車結果如圖6所示。

圖6 干燥路面跟馳結果
MoSC 在PT 下,采用橫向和縱向控制使得本車在整個過程中不僅可以維持一定的跟馳距離和相對速度,也可跟隨前車的橫向行為,如換道。在6 s時,前車向右換道,隨后本車逐步增大前輪轉角以跟隨前車換道。最終,本車速度為1.6 m/s,保持與前車速度相同。
3.2.2 前方切入
跟馳過程中,當旁車由前方切入本車道時,主車不應與旁車發生碰撞,并且旁車繼續保持本車道行駛時,本車應及時更換跟馳目標,結果如圖7所示。

圖7 旁車由前方切入結果
在4 s 時,旁車以1 m/s 切入本車與前車之間,隨后主車由1.7減速至1.2 m/s,維持與旁車安全距離。前車換道后,主車仍然繼續跟馳切入的旁車,將其視為新前車。在6 s后,主車維持與新前車同樣的速度和橫向運動。
3.2.3 側向接近
多數碰撞是由旁車與主車發生側向碰撞,因此主車須及時躲避旁車側方接近所帶來的潛在碰撞,相關結果如圖8所示。

圖8 旁車由側方切入結果
在1 s 時,旁車逐漸開始加速接近主車,此時TTC計算觸發。在4.7 s時,TTC1小于Thres1_1,模式切換至ST。此時,旁車位于主車右后方,為增大距離,主車以3.5 m/s2加速至2.6 m/s。但是,隨著旁車不斷接近主車側向,主車無法通過縱向移動增大碰撞時間,因此,在5.1 s 時,TTC1小于Thres1_2,主車采用主動轉向方式增大距離。最優前輪轉角與碰撞距離有關,當側碰風險存在時,主車僅需增大其與旁車距離即可,因此,最大前輪轉角為0.3 rad,持續時間0.4 s。
3.2.4 側后方接近
旁車由側后方逐漸接近本車時,本車應同時避免與旁車的碰撞和前車的追尾。相關結果如圖9所示。
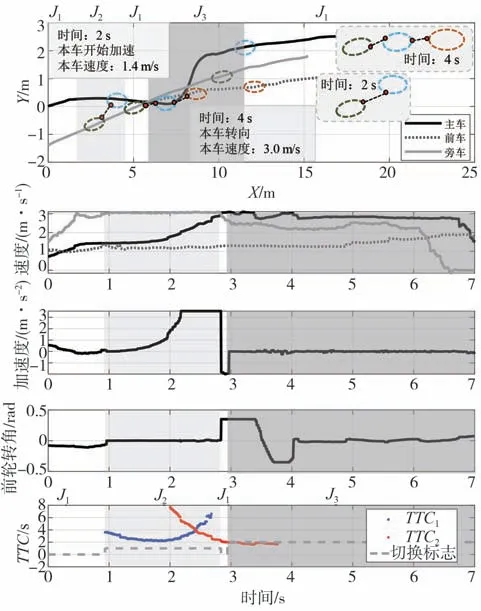
圖9 旁車由側后方切入結果
在開始時,旁車加速接近本車側后方,此時,TTC 計算觸發。在2 s 時,TTC1小于Thres1_1,模式切換至ST,主車開始加速。在2-3.3 s 間,隨著旁車不斷地接近,主車以3.5 m/s2持續加速至3.0 m/s。在3.8 s時,隨著旁車減速,TTC1增大,此時恢復PT,主車減速維持與前車的安全跟馳距離。由于速度無法突變,在減速過程中,TTC2小于Thres2,在4 s 時,為了避免與前車和旁車發生碰撞,主車采用主動轉向更換車道。此次須同時增大其與旁車和前車的距離,因此,期望前輪轉角達0.4 rad 實現換道。換道過程中須滿足穩定性約束,其結果如圖10所示。

圖10 基于多車試驗平臺的相平面結果
由圖10 所示,換道過程中的橫向速度和橫擺角速度在穩定性約束范圍內,因此穩定性滿足要求。另外,在車輛控制過程中未出現失控及執行錯誤,可知算法實時性滿足要求。
4 結論
本文提出了一種智能車輛的多目標切換控制方法,結合穩定性約束前提和ACC 運行過程中的智能車輛為背景,保證并提升車輛跟馳、主動避撞、橫向穩定性、行駛穩定性等多目標行駛要求。該方法中的上層規劃器以橫向穩定性約束為前提集成ACC模型、車輛動力學和運動學模型,設計不同目標函數為底層控制器生成期望加速度和期望前輪轉角。基于上層規劃器結果,底層控制器采用二次優化方法計算最優縱向輪胎力和車輪轉速保證車輛行駛穩定性,并利用超扭轉滑模控制生成車輪驅動力矩,實現多執行器的協調控制。為提升車輛的避撞性能,采用橢圓車輛外形實現本車與不同方向隨意切入車輛的碰撞風險量化計算,獲取精確的碰撞時間和碰撞距離。并基于多車的橫向距離和航向角,設計了觸發條件以啟用風險量化計算。依據風險量化結果,設計目標切換機制,使車輛在跟馳目標和主動避撞目標間切換,并對控制器在切換過程中的漸近穩定性進行證明。最后,采用多車試驗平臺對所提方法進行驗證。結果表明,該方法在穩定性約束下,可實現不同行駛目標間的切換,保障車輛的穩定性和安全性,對多目標控制系統設計具有重要意義。未來研究將考慮不同行駛環境以及多車交互下的動態障礙物避撞控制,協同控制其他子系統增強多目標行駛要求,并基于量產車實現算法驗證。
附錄A
系統預測模型狀態空間方程中的狀態、輸入和輸出矩陣為
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
