高速飛行器俯沖段制導控制一體化綜述
2023-05-30 10:48:04郭建國梁樂成周敏蔣瑞民
航空兵器 2023年1期
郭建國 梁樂成 周敏 蔣瑞民

引用格式:郭建國,梁樂成,周敏,等.高速飛行器俯沖段制導控制一體化綜述[J].航空兵器,2023,30(1):1-10.
GuoJianguo,LiangLecheng,ZhouMin,etal.OverviewofIntegratedGuidanceandControlforHypersonicVehiclesinDivePhase[J].AeroWeaponry,2023,30(1):1-10.(inChinese)
摘要:本文從模型構建和方法設計兩個方面對高速飛行器俯沖段制導控制一體化問題進行綜述。首先,對俯沖段制導控制一體化模型構建進行總結,依據系統集成度提升程度的不同,分別對分通道制導控制一體化模型、全狀態耦合高階一體化模型,以及集成度提升低階一體化模型構建進行了介紹,并對飛行器系統和設計模型特性進行了分析,指出了面臨的主要設計問題。其次,針對俯沖段制導控制一體化設計難點,從快時變強不確定性魯棒控制、高階非匹配不確定性控制,以及考慮多約束控制方面對設計方法進行綜述,總結并評述了國內外相關理論的發展現狀和不足。最后,對俯沖段制導控制一體化的發展趨勢進行了展望。
關鍵詞:高速飛行器;制導控制一體化;俯沖段;不確定性;多約束控制;魯棒控制
中圖分類號:TJ765;V249
文獻標識碼:A
文章編號:1673-5048(2023)01-0001-10
DOI:10.12132/ISSN.1673-5048.2022.0182
0引言
高超聲速飛行器一般指飛行馬赫數大于5,飛行高度在20~100km的臨近空間先進飛行器[1]。這類飛行器兼具傳統航天器和航空器的優點,具有作戰空域大、航程遠、飛行速度快等特點,可以對各類遠程目標進行打擊,具有比傳統彈道式導彈更強的機動性和突防能力,表現出重要的軍事價值[2-3]。
飛行器的制導控制系統直接決定了飛行性能,而俯沖段是決定對目標打擊效果的關鍵。傳統的制導控制系統設計基于時標分離假設,將系統分為慢回路制導系統和快回路姿態控制系統,分別獨立設計制導律和姿態控制律[4-6],但是這一傳統設計思路在面對高超聲速飛行器這類復雜高動態系統時,設計局限性突出。高超聲速飛行器因其特殊的飛行條件和氣動外形,表現出復雜的快時變、強耦合、強非線性、非最小相位等復雜動力學特性,質心運動和繞質心運動的耦合關系加強[7],這是由于高速飛行可能引起制導回路時間常數減小,以及高動態快速下壓打擊目標時出現時標分離假設失效的情況,從而導致控制性能下降和彈體失穩。此外,傳統的制導控制分離設計存在制導和姿態控制指令的傳輸延遲問題,難以滿足高超聲速飛行器這類對快速性具有更高要求的系統,尤其是要求飛行器快速機動的俯沖段,因此,為了滿足系統綜合性能需要,必須進一步考慮加強制導和控制回路的聯系,進行一體化的綜合設計。
制導控制一體化在制導子系統設計中完全引入了繞質心轉動環節,直接產生對執行器的控制指令,克服了時標分離假設的局限性,有助于提升制導控制系統的快速性和飛行器的綜合性能,減少制導和姿態控制系統在設計上的重復性和保守性[8]。經過國內外學者的長期研究,出現了大量關于模型構建和方法設計等方面的研究成果。俯沖段制導控制一體化模型構建方面,按照系統集成度逐漸提升的順序,大致經歷了從分通道制導控制一體化模型、全狀態耦合高階一體化模型、集成度提升低階一體化模型的發展階段[9]。分通道制導控制一體化模型是將飛行器的三維空間運動分解到縱向和側向通道,忽略了通道間的耦合關系,對于通道間耦合不嚴重飛行器一般具有較好的控制效果,但對于面對稱氣動布局飛行器、彈體姿態快速調整飛行器,難以獲得滿意的控制效果。全狀態耦合高階一體化模型是基于三維空間運動形式,直接由飛行器與目標相對運動方程、飛行器質心及繞質心動力學方程推導得到,具有表征飛行器全狀態耦合關系的特征,一般具有高階嚴格反饋形式,是主流的制導控制一體化設計模型,但是模型的復雜性增加了控制器設計困難,且未擺脫制導控制分離式的建模思路。集成度提升低階一體化模型通過建立部分環節的解析方程等方式,對全耦合高階一體化模型進行部分替代,進一步加強了各子系統的聯系,降低了模型復雜度以及控制器的設計困難,對于面向控制器設計的模型簡化處理是一個重要研究方向。
俯沖段制導控制一體化設計方法方面,針對飛行器制導控制所面臨的主要問題,國內外學者針對快時變強不確定性魯棒控制、高階非匹配不確定性控制、滿足多約束條件控制等方面開展了大量研究工作。對于高超聲速飛行器面臨強烈不確定性問題,發展出了基于滑模變結構控制和H∞控制等魯棒控制理論的設計方法,其中。對于系統面臨的大量高階非匹配不確定性問題,主要基于反步控制將制導控制器設計問題轉化為輸出調諧問題,并通過設計干擾觀測器、自適應律等方式對各階子系統的非匹配不確定性進行補償,這是當前主流的設計思路。這類通過逐級遞歸方式獲得控制指令的設計思路,要求中間系統狀態逐漸跟蹤上一步的虛擬控制指令,實際上仍然是控制回路跟蹤制導指令的部分制導控制一體化,飛行器的快速響應要求無法保證。另外,制導控制一體化面臨多種約束條件的限制,俯沖段主要考慮過程約束和終端約束[10]。終端約束一般包括末端落點、落角和落速約束,而過程約束一般由飛行任務需求決定,包括過載、動壓、熱流約束等。考慮飛行器姿態約束同樣有利于提升控制性能,考慮執行器故障的容錯控制也得到廣泛研究。
本文對高超聲速飛行器俯沖段制導控制一體化設計進行綜述。首先,對模型構建進行綜述,對分通道制導控制一體化模型、全狀態耦合高階一體化模型、集成度提升低階一體化模型的構建方法、模型特性以及主要設計問題進行了分析總結。其次,對俯沖段制導控制一體化設計方法進行綜述,針對系統面臨的設計難點,從快時變強不確定性魯棒控制、高階非匹配不確定性控制、滿足多約束條件控制三個方面,對相關設計方法的研究進展進行了綜述。
1俯沖段制導控制一體化模型構建
針對高超聲速飛行器俯沖段制導控制一體化的設計模型,給出面向制導控制器設計的飛行器—目標相對運動關系及其相關模型的構建思路。
1.1分通道制導控制一體化模型
分通道制導控制一體化一般是將飛行器的空間運動分解在縱向和側向兩個解耦平面,分別進行制導控制一體化方法的設計,由于這類設計模型忽略了通道間耦合,模型階數和設計難度大幅降低,控制器參數減少。
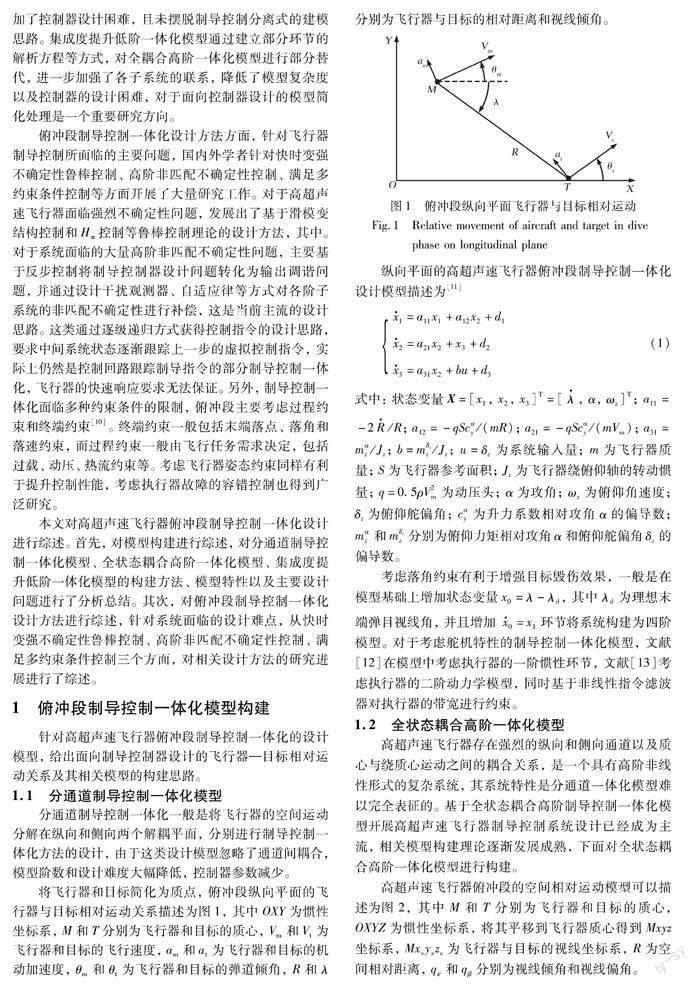
將飛行器和目標簡化為質點,俯沖段縱向平面的飛行器與目標相對運動關系描述為圖1,其中OXY為慣性坐標系,M和T分別為飛行器和目標的質心,Vm和Vt為飛行器和目標的飛行速度,am和at為飛行器和目標的機動加速度,θm和θt為飛行器和目標的彈道傾角,R和λ分別為飛行器與目標的相對距離和視線傾角。
縱向平面的高超聲速飛行器俯沖段制導控制一體化設計模型描述為[11]
x·1=a11x1+a12x2+d1
x·2=a21x2+x3+d2
x·3=a31x2+bu+d3(1)
式中:狀態變量X=[x1,x2,x3]T=[λ·,α,ωz]T;a11=-2R·/R;a12=-qScαy/(mR);a21=-qScαy/(mVm);a31=mαz/Jz;b=mδzz/Jz;u=δz為系統輸入量;m為飛行器質量;S為飛行器參考面積;Jz為飛行器繞俯仰軸的轉動慣量;q=0.5ρV2m為動壓頭;α為攻角;ωz為俯仰角速度;δz為俯仰舵偏角;cαy為升力系數相對攻角α的偏導數;mαz和mδzz分別為俯仰力矩相對攻角α和俯仰舵偏角δz的偏導數。
考慮落角約束有利于增強目標毀傷效果,一般是在模型基礎上增加狀態變量x0=λ-λd,其中λd為理想末端彈目視線角,并且增加x·0=x1環節將系統構建為四階模型。對于考慮舵機特性的制導控制一體化模型,文獻[12]在模型中考慮執行器的一階慣性環節,文獻[13]考慮執行器的二階動力學模型,同時基于非線性指令濾波器對執行器的帶寬進行約束。
1.2全狀態耦合高階一體化模型
高超聲速飛行器存在強烈的縱向和側向通道以及質心與繞質心運動之間的耦合關系,是一個具有高階非線性形式的復雜系統,其系統特性是分通道一體化模型難以完全表征的。基于全狀態耦合高階制導控制一體化模型開展高超聲速飛行器制導控制系統設計已經成為主流,相關模型構建理論逐漸發展成熟,下面對全狀態耦合高階一體化模型進行構建。
高超聲速飛行器俯沖段的空間相對運動模型可以描述為圖2,其中M和T分別為飛行器和目標的質心,OXYZ為慣性坐標系,將其平移到飛行器質心得到Mxyz坐標系,Mxsyszs為飛行器與目標的視線坐標系,R為空間相對距離,qε和qβ分別為視線傾角和視線偏角。
系統狀態x1=[q·ε,q·β]T,x2=[αcosγv,αsinγv]T,x2=[α,β,γv]T,x3=[ωx,ωy,ωz]T,u=[δa,δe,δr]T,高超聲速飛行器俯沖段全耦合高階制導控制一體化設計模型可以描述為[14]
x·1=f1(x1)+g1x2+Δ1
x·2=f2(x2)+g2x3+Δ2
x·3=f3(x3)+g3u+Δ3(2)
式中:
f1=
-2R·q·ε/R-q·2βcosqεsinqε+(T11V·m-T12gcosθm)/R
2q·εq·βtanqε-2R·q·β/R+(T21V·m-T22gcosθm)/(Rcosqε);
f2=-YmVmcosβ,ZmVm,0T;f3=(Jy-Jz)ωzωy/Jx
(Jz-Jx)ωxωz/Jy
(Jx-Jy)ωyωx/Jz;
g1=qSmR-T12cαy-T13cαyT22cαycosqεT23cαycosqε;
g2=-tanβcosαtanβsinα1sinαcosα01-tanφcosγvtanφsinγv;
g3=QSJ-1xLxmδaxJ-1xLxmδexJ-1xLxmδrxJ-1yLymδayJ-1yLymδeyJ-1yLymδryJ-1zLzmδazJ-1zLzmδezJ-1zLzmδrz;
Δ1=[Δ11,Δ12]T;Δ2=[Δ21,Δ22,0]T;
Δ3=[Δ31,Δ32,Δ33]T;
Δ11=aTε/R;Δ12=aTβ/(Rcosqβ);
Δ21=-g(sinφsinα+cosφcosγcosα)Vmcosβ;
Δ22=g(sinφcosαsinβ-cosφcosγsinαsinβ+cosφsinγcosβ)Vm;
Δ31=qSLxmx0+qSLxmαxα+qSLxmβxβJx;
Δ32=qSLymy0+qSLymαyα+qSLymβyβJy;
Δ33=qSLzmz0+qSLzmαzα+qSLzmβzβJz。
全狀態耦合高階制導控制一體化模型將飛行器的攻角α、側滑角β和傾側角γv作為聯系制導與控制回路的中間變量,一般構建為8~10階的強耦合、強非線性、強不確定性的嚴格反饋形式,其中包含了大量非匹配不確定性。
落角約束要求增加x0=[qε-qεd,qβ-qβd]T,其中qεd和qβd為理想末端視線傾角和偏角,增加x·0=x1環節和兩階的系統階數[15]。部分研究考慮了執行機構動態特性,但是由于模型本身的高階復雜性,相關研究的工程意義并不明顯。
1.3集成度提升低階一體化模型
雖然全狀態耦合制導控制一體化模型是基于飛行器六自由度模型直接推導得到的,反映了各通道間以及質心和繞質心運動間的耦合關系,但是面臨著模型階數高、狀態變量多等問題,增加了制導控制器的設計困難。集成度提升低階制導控制一體化模型通過解析模型替代全狀態耦合一體化的部分子系統,提升了飛行器制導和繞質心運動子系統的集成度,具有降低系統階數、簡化控制器設計、減少控制參數的優勢,更深刻揭示了飛行器各個子系統的聯系。
基于加速度在彈道坐標分量的三通道角速率解算模型,以視線角速率和彈體角速率為狀態變量,建立以舵機偏轉為輸入的嚴格反饋低階制導控制一體化模型。系統狀態變量為x1=[q·ε,q·β]T,x2=[ωx,ωy,ωz]T,系統輸入為u=[δa,δe,δr]T,低階制導控制一體化模型為[16]
x·1=fq+G1x2+d1
x·2=fω+G2u+d2(3)
式中:
fq=-2R·q·εR-q·2βcosqεsinqε2q·εq·βtanqε-2R·q·βR+-1R001RcosqεTSGTGBu·V·w·;
fω=[Δωx,Δωy,Δωz]T;
G1=-1/R001/(Rcosqε)TSGAB;
G2=QSJ-1xLxmδaxJ-1xLxmδexJ-1xLxmδrxJ-1yLymδayJ-1yLymδeyJ-1yLymδryJ-1zLzmδazJ-1zLzmδezJ-1zLzmδrz;
其余變量定義見文獻[16]。
低階制導控制一體化模型實現了繞質心彈體角速率的解析計算,并且降低系統階數為五階,減少了跟蹤控制回路的設計參數,省略了根據期望加速度反求解飛行器歐拉角的過程,提高了制導控制一體化設計的集成度。
進一步加強高超聲速飛行器俯沖段制導控制一體化的集成度,通過建立質心制導被控量和繞質心姿態控制執行器之間的直接解析關系,一種全集成低階制導控制一體化模型為[17]
x·1=x2
x·2=F+Gu(4)
式中:系統狀態變量為x1=[q·ε,q·β]T;x2=[q¨ε,q¨β]T;輸入u=[δa,δe,δr]T;G=DABE,D∈R2×3;F∈R2×1,
F=dCdt+dDdtTGBuvw+DEφ·ψ·γ·+DTGBu¨v¨w¨+DMωxωyωz+
dDdtABωxωyωz+DABΔωxΔωyΔωz;
其余變量定義見文獻[17]。
全集成低階制導控制一體化模型建立了飛行器質心速度(質心運動視線角速度)的三階微分與執行器舵偏角之間的解析模型,相較式(3)的低階模型,進一步提升了系統的集成度。全集成低階一體化模型包含兩類二階微分量:一類為飛行器彈體坐標系下能夠實際測量的信號,即加速度分量的微分,另一類為飛行器與目標相對運動狀態變量的微分,它能夠通過相對空間位置的直接求解得到[16]。
受到文獻[17]中飛行器加速度分量與彈體角速率之間的解析模型的啟發,文獻[18]基于彈體角速率動力學特性,建立了一種低階制導控制一體化模型,同時引入了體視線坐標系的飛行器-目標相對運動模型,準確描述了配備紅外成像導引頭的高超聲速飛行器的帶側窗約束問題。有學者將集成度提升低階一體化模型的思路引入部分制導控制一體化中,文獻[19]根據高超聲速飛行器在彈道坐標系沿三軸方向的期望加速度分量,基于解析方程得到了期望彈體角速率,建立了一種基于實測加速度的低階制導控制一體化模型,省去了根據期望加速度產生歐拉角指令的過程,文獻[20]基于類似的思路對飛行器的姿態控制子系統進行了降階處理。
1.4模型構建對比及特性分析
本節對三種典型的俯沖段制導控制一體化模型構建進行對比分析。
(1)全狀態耦合高階一體化模型:包含大量匹配或者非匹配不確定性的高階高非線性強耦合模型,較全面反映狀態變量耦合關系和非線性關系,存在高階復雜性導致的制導控制器設計困難問題。
(2)分通道制導控制一體化模型:將空間運動分解到縱向和側向平面上,對于通道耦合不嚴重的飛行器或飛行階段具有良好的控制能力,降低了模型階數和耦合度,但是面臨模型準確度明顯降低的問題。
(3)集成度提升低階一體化模型:直接建立高階一體化模型部分子系統的解析方程,降低模型階數和消除系統非匹配不確定性,同時保留模型耦合及非線性關系,不降低模型準確度,但是仍然依賴于假設條件。
開展高超聲速飛行器模型特性分析有利于明確系統設計的關鍵因素,下面以全狀態耦合一體化模型為例,結合飛行器六自由度模型和氣動模型進行特性分析。
(1)強耦合特性:質心制導和繞質心姿態控制以及通道間存在耦合關系,氣動力和力矩通常由狀態參數的非線性插值方式獲取,高動態系統的控制量和狀態量快速變化時耦合關系增強,表現為系統的強耦合性。
(2)強非線特性:俯沖段高超聲速飛行器的高速域廣,氣動力和氣動力矩受飛行速度影響較大,由于模型非線性與飛行速度相關,表現為系統的強非線性。
(3)高動態特性:高速飛行時目標從進入視場到擊中的時間極大縮短,表現為系統狀態快速變化的高動態特性,快速下壓打擊時由于質心快速變化,容易造成時標分離假設失效。
(4)強不確定性特性:系統包含目標機動、氣動參數等未建模因素引起的不確定性,存在參數攝動、外界擾動、測量誤差等因素引起的不確定性,表現為系統的強不確定性,要求考慮對抗不確定性的魯棒控制設計。
(5)高階非匹配不確定性特性:全狀態耦合一體化為8~10階的高階復雜模型,包含了大量高階非匹配不確定性,經典魯棒控制理論存在非匹配不確定性的“不變性”失效問題,容易喪失控制器的魯棒性,要求考慮對高階非匹配不確定性的估計和補償方法。
(6)多目標約束條件:系統約束條件主要包括落點、落角和落速的末端約束,以及過載、輸入、動壓、熱流的過程約束,俯沖段尤其要求法向過載和輸入約束,狀態約束控制有利于穩定性提升[21],容錯控制對保證故障條件的系統可靠性具有重要意義。
2俯沖段制導控制一體化方法
高超聲速飛行器區別于彈道式或巡航式導彈,由于嚴峻復雜的飛行環境和氣動結構,制導控制器設計面臨以快時變、強不確定性和非匹配不確定性等為代表的復雜問題,同時要求滿足多目標約束條件。目前高超聲速飛行器俯沖段制導控制一體化發展出了大量設計理論,但是客觀地講,學術界關于制導控制一體化的概念并未明晰,本文僅針對設計理論的創新性予以總結。
2.1快時變強不確定性魯棒控制
現有研究大多局限于飛行器固定工作點的控制器設計,對于飛行器的時變參數影響考慮不足,而俯沖下壓段高超聲速飛行器具有快時變特點,通常采用系數凍結、選取多個特征點或者增益插值方法設計參數時變控制器,但是很難從理論上保證閉環系統在時變工況下的穩定性和控制性能,采用切換多胞形式的時變飛行器穩定控制方法受到關注[22]。此外,高超聲速飛行器俯沖段制導控制一體化還面臨模型的強不確定性問題,因此提出對抗系統強不確定性的魯棒設計方法。常用的魯棒設計方法包括滑模變結構控制和H∞控制等,以強化學習為代表的智能控制方法對提升系統魯棒性方面同樣具有重要意義。
滑模變結構控制是一種結構簡單且高性能的非線性控制方法,通過對滑模面和趨近律的設計,迫使系統狀態沿著滑模面收斂,從而實現預期的控制目標,系統的滑動模態對于滿足匹配條件的不確定性具有不變性。變結構控制方法常用于傳統制導控制分離式設計[23],對于制導控制一體化問題,滑模變結構控制主要見于采用集成度提升低階模型的設計方法中,基于全耦合高階模型的設計方法更多地將變結構控制作為提升系統魯棒性的輔助技術。這是由于變結構控制僅適用于處理模型的匹配不確定性,對于全耦合高階模型的非匹配不確定性,通常還需要結合反步法或動態面方法。
文獻[24]根據解析方法將高階的制導控制一體化模型轉化為二階非線性模型,通過設計線性滑模面和指數趨近律,提出一種算法簡單、響應速度快的滑模制導控制一體化方法,明顯減少了控制參數的數量,仿真結果表明該方法具有對抗系統不確定性的魯棒性,但是在氣動拉偏試驗中仍出現了有限幅度的振蕩問題。指數趨近律下,系統狀態接近滑模面是一個漸進過程,難以滿足飛行器俯沖段的快速性要求。文獻[19]基于低階模型設計制導控制一體化方法,冪次趨近律能夠保證系統狀態的有限時間收斂,并且采用自抗擾控制方案,在系統中引入擴張狀態干擾觀測器,增強系統對抗強不確定性的魯棒性。積分滑模控制通過保證系統初始狀態位于滑模面,避免了線性滑模控制趨近階段的缺點,系統魯棒性有所提升。文獻[25]將系統非線性、目標機動和氣動參數變化等作為系統不確定性,建立了一種平面線性制導控制一體化模型,基于積分滑模控制直接求解俯仰舵指令,并且設計了二階干擾觀測器對系統非匹配不確定項及其微分進行估計補償,克服了反步法求解制導控制一體化問題的缺點,提升了系統集成度,但是系統不確定項復雜,估計精度降低時容易造成控制性能下降。文獻[26]基于非線性模型提出了一種滑模制導控制一體化方法,設計了包含不確定性估計量的線性滑模面,并且基于三個非線性干擾觀測器技術對系統的匹配和非匹配不確定性進行估計補償。傳統的線性滑模控制結構簡單,但是系統狀態是以漸進速度收斂到目標點的,為了保證系統狀態的有限時間收斂,逐漸發展出了終端滑模控制方法,以及為了避免奇異性的非奇異終端滑模控制方法等,但是目前采用這類滑模變結構控制方法的高超聲速俯沖段制導控制一體化設計卻鮮有報道。
除了基于低階模型的滑模變結構控制器,還有學者研究了基于H∞控制和強化學習理論的制導控制一體化設計方法。H∞控制是一種經典的魯棒控制方法,其將控制系統的性能指標表述為特定閉環傳遞函數矩陣H∞控制范數的形式,通過抑制噪聲到期望輸出的傳遞函數集的最大增益達到對抗系統強不確定性的目的,不但具有較強的魯棒性,而且能對一些性能指標進行優化。文獻[27]基于H∞控制理論推導了一種自適應非線性制導控制一體化方法,實現了對地面目標的落角約束打擊,但是未對系統魯棒性進行充分仿真驗證。文獻[28]針對面對稱飛行器提出一種H∞魯棒制導控制一體化方法,基于L2增益性能方法實現了擾動衰減,理論證明了不確定性到系統輸出信號的L2增益小于等于γ21+γ22+γ23,仿真試驗說明了系統在沒有主動噪聲抑制的條件下仍具有對抗強不確定性的魯棒性。H∞控制具有強魯棒性,但是面臨著計算量大和控制器設計復雜的問題,并且在設計上具有較強的保守性,因此目前應用于高超聲速飛行器這類高動態復雜系統的制導控制一體化設計方法研究仍然較少。為適應飛行器的快時變特性,文獻[29]采用切換多胞系統描述飛行器包線范圍內的時變飛行動態,基于廣義系統方法獲得切換多胞形式的變增益H∞跟蹤控制器方法,給出閉環系統在時變條件下的抑制穩定性和H∞性能分析方法。文獻[30]還針對可變后掠翼的變體飛行器建立了切換多胞模型,能夠保證全包線下的飛行穩定,給出利用小凸包算法選取特征點的方法,針對各特征點線性化模型設計了最優控制律。
強化學習理論的制導控制一體化算法通過與環境的交互不斷調整更新控制策略,一般不要求系統精確建模和人工參數調整,具有適應飛行器復雜飛行環境的魯棒性。文獻[31]將制導控制設計問題轉化為馬爾科夫決策過程,提出一種權衡制導精度、能量損耗和飛行時間的獎勵函數,基于深度確定性策略梯度算法求解強化學習問題,能夠根據觀測量生成舵偏角指令準確攔截目標,仿真說明了算法對彈體參數和氣動不確定性的良好不確定性。強化學習在解決制導控制問題時具有傳統控制方法難以企及的優勢,但是由于這類控制器要求較長的訓練過程,并且面臨控制器穩定性難以證明、最優控制策略收斂難以保證,以及模擬訓練環境下的過擬合等問題,目前還難以適應工程上對高動態飛行器制導控制器的設計需求。
2.2高階非匹配不確定性控制
高超聲速飛行器俯沖段制導控制一體化面臨模型的高階非匹配不確定性問題,因此要求提出對抗大量非匹配不確定性的設計方法。除了依靠控制器固有的魯棒性對抗不確定性的被動控制,主動控制常用在處理非匹配不確定性方面。對于設計模型采用分通道和全狀態耦合高階制導控制一體化的系統,一般的設計思路是基于反步控制類方法,將完整系統分解為多個低階子系統,通過設計干擾觀測器或自適應律對子系統的非匹配或者匹配不確定性進行估計和補償的自抗擾控制思路[32]。
反步法適合處理高階控制系統,其本質是通過逐步遞歸地設計低階子系統的中間虛擬控制律,不斷后退返回整個控制邏輯,能夠實現系統的全局跟蹤調節,有效解決不確定性的非匹配問題,并且容易與Lyapunov穩定性理論結合證明。文獻[33]基于五階的平面制導控制一體化模型,提出了一種考慮落角約束的反步制導控制一體化方法,基于擴張狀態干擾觀測器估計和補償系統的非匹配不確定性,同時在反步法中結合非奇異全局終端滑模控制,保證視線角的快速收斂,仿真試驗說明了系統魯棒性得以提升。由于基于反步法的控制器通常要求系統精確建模,因此結合滑模變結構控制的魯棒制導控制一體化設計也是學術界的一種普遍做法[13]。
反步法存在求解虛擬控制律微分的問題,尤其對于高階控制系統,容易引起“指令爆炸”問題。動態面法的出現一定程度上克服了此問題,其通過引入低通濾波器避免了對虛擬控制律的直接微分過程[34],已經發展為反步控制類設計方法的主流。除此之外,指令濾波器也具有類似作用[35]。文獻[36]在高階制導控制一體化模型中考慮了氣動耦合項,降低了氣動不確定性的復雜度,基于動態面的思路設計了一種考慮三維落角約束的制導控制一體化方法,但是由于缺乏對非匹配不確定性的處理,仿真結果說明系統魯棒性比較差。文獻[37]基于塊動態面法提出一種適合傾斜轉彎控制的高超聲速飛行器制導控制一體化方法,針對模型不確定性,由單值模糊器、高斯隸屬度函數、乘積推理器和中心平均解模糊器構成的模糊系統逼近任意非線性函數,采用模糊干擾觀測器進行估計補償。文獻[38]在擴張狀態干擾觀測器中引入了神經網絡對復雜系統的不確定性、非線性和擾動項等進行估計,進一步提升了系統對抗非匹配不確定性的魯棒性。這類以干擾觀測器對抗模型非匹配不確定性的方法,一般是通過狀態估計來重構和抑制非匹配不確定性,而自適應律能夠對系統不確定性的幅值或者上界等信息進行直接自適應估計。文獻[39]將高階動態面法引入高超聲速跨介質變外形飛行器的制導控制一體化設計中,通過設計自適應律準確估計了系統的非匹配和匹配不確定性上界,仿真結果表明系統具有對抗高階非匹配不確定性的能力。
高階制導控制一體化控制器存在結構復雜問題,實際上并未擺脫分離式設計的串聯控制方式,對實際工程的意義存在爭議,但是仍有助于利用軟件算法代替傳統分離式設計的部分硬件功能[40]。設計一種結構更為簡單的多約束制導控制器有助于降低系統復雜度,文獻[17]基于帶側窗約束的低階制導控制一體化模型,提出了一種有限時間收斂的動態面制導控制一體化方法,與高階制導控制一體化方法相比,系統的非匹配不確定項明顯減少,控制器的復雜度和控制參數數量都顯著降低。
2.3滿足多約束條件控制
實際控制系統受到多種約束條件的限制,尤其是飛行器等復雜控制對象。對于高超聲速飛行器俯沖段的制導控制器設計問題,主要考慮包括過載和輸入約束問題,攻角、側滑角等歐拉角和彈體角速率的約束問題,也包括執行器故障等其他約束問題。
由于飛行器的執行機構具有物理限制,制導控制一體化系統要求考慮其幅度或者速率的限制問題,否則容易導致控制性能的嚴重下降。對輸入飽和的處理目前主要分為直接設計和抗飽和控制兩種,直接設計是在控制器設計中直接考慮輸入飽和的影響,從而保證閉環系統穩定,而抗飽和控制在設計上更為靈活,在設計中一般不考慮飽和特性的影響,直接基于控制輸入的偏置來補償飽和所引起的系統狀態偏差,減弱輸入飽和對系統造成的影響[24]。文獻[41]直接對系統輸入取飽和函數進行限幅,設計了一種自適應抗飽和控制器來補償輸入飽和所引起的系統狀態變化,并且根據Lyapunov理論證明了系統的閉環穩定。另外,同樣屬于抗飽和控制,Nussbaum類函數和指令濾波器也多用于處理輸入飽和問題[42]。Nussbaum類函數本身是一個具有上下界積分區域無窮性質的函數,文獻[43]采用Nussbaum增益技術對控制信號進行自適應調節,并且結合雙曲正切函數實現了輸入約束,同時設計了輔助系統補償輸入飽和對系統狀態的影響。Nussbaum方法在理論上是令人滿意的,但是由于控制器的保守性和缺乏對實際工程的適用性而受到質疑。指令濾波器結合輔助控制系統的方式同樣可以實現輸入飽和以及補償飽和誤差,并且對輸入的幅值、速率和帶寬通道同時具有約束能力,文獻[13,38]在模型中考慮了執行機構的高階動力學特性,基于非線性指令濾波器實現對執行機構的幅值速率以及帶寬的約束。
執行器故障時,系統控制能力出現明顯下降,甚至可能導致飛行器的失穩和脫靶,因此考慮執行器故障和提升系統可靠性也是一個重要問題。文獻[44]將執行器故障與氣動參數擾動等因素同樣視為系統不確定性,通過設計自適應律估計并補償的方式予以克服。這類將執行器故障視為系統不確定性的方式簡單且易于實現,但是沒有對故障特性進行系統分析,屬于一種被動容錯控制方案。文獻[45]提出一種自適應模糊控制的主動容錯控制方案,能夠根據參數可調的自適應控制律和模糊邏輯系統對執行器故障進行實時補償,不要求獲取非線性不確定性和控制增益等未知信息,具有更強的適應性。
為保證彈載設備的正常工作,防止彈體結構損傷,要求保證飛行器的正常過載,根據氣動特性可以將飛行器的過載約束轉化為對歐拉角,即攻角、側滑角和傾側角的約束問題。另外,對于采用軸對稱氣動布局的飛行器,以較大的攻角、側滑角和傾側角飛行時會降低控制精度,因此要求對飛行器采取限制歐拉角的飛行策略[46]。文獻[36]通過約束動態面法的中間虛擬控制律,一定程度對飛行器的攻角、側滑角和傾側角進行了限制,為實現狀態約束提供了一種簡便思路,但是無法保證系統狀態不會違反約束。在對系統狀態進行嚴格約束的問題中,目前以障礙Lyapunov函數最為常見[47],障礙Lyapunov函數值在受約束系統狀態接近邊界值時趨于無窮,能夠通過Lyapunov理論直接證明系統狀態變量不會違反約束。文獻[44,48]提出了滿足多約束的動態面制導控制一體化方法,分別基于修正飽和函數對中間虛擬控制律進行飽和約束,并且基于障礙Lyapunov函數對動態面變量進行約束,保證補償后的狀態跟蹤誤差有界,最后通過理論證明保證了攻角、側滑角和傾側角被嚴格限制在允許范圍內。值得注意的是,狀態約束下的制導控制一體化方法應當考慮對歐拉角的約束是否會降低系統控制性能,甚至產生一些不可預測的后果。
3俯沖段制導控制一體化控制展望
3.1融合多約束條件的制導控制模型構建
高超聲速飛行器俯沖段制導控制系統是包含豐富耦合關系的復雜系統,存在通道間耦合、制導和控制回路耦合、多約束條件耦合等多種耦合關系。區別于制導和控制回路獨立設計的傳統模型構建思路,以全狀態耦合高階一體化模型和集成度提升低階一體化模型為代表的模型構建方式,一定程度上加強了制導控制回路的耦合關系,但是目前在融合多約束條件的模型構建方面的研究不足。對多約束制導控制器的研究主要在于設計方法,但是當系統面臨大量復雜約束條件時,容易引起穩定域狹小和控制參數數量多等問題,因此有必要對融合多約束條件的制導控制模型構建理論進行研究。
俯沖段制導控制系統面臨的主要約束條件包括終端約束和過程約束兩個方面。要求考慮的終端約束條件主要是落點和落角約束,對于高超聲速飛行器,設計合理的落速控制策略,可避免嚴重氣動加熱產生的等離子體形成信號屏障,對準確命中目標具有重要意義[49]。目前考慮落角約束的模型構建是以相對視線角作為被控量,通過設計控制器保證視線角誤差趨近零來實現的。落速約束在制導律設計中通常是以增大攻角和自適應制導參數來實現的,少有關于融合落速約束在制導控制模型方面的研究。俯沖段要求考慮的過程約束主要包括導引頭視場角和動態特性、飛行過載和動壓約束,以及飛行姿態等耦合因素,目前學者們在融合導引頭視場約束的模型構建方面開展了相關研究[50],但是通常在模型中忽略了彈體姿態運動,可能引起全捷聯導引頭鎖定目標失敗。另外,目前對融合其他過程約束條件的模型構建理論研究較少。
由于融合多約束條件的制導控制模型的復雜性,導致相應制導控制器的設計困難,進一步考慮對模型的簡化方法,建立便于控制器設計的融合多約束條件的制導控制簡化模型,同樣具有現實意義。
3.2滿足工程多目標約束條件的制導控制方法
實際工程要求考慮系統的多目標約束條件,高超聲速飛行器制導控制系統在實際俯沖飛行段和對目標打擊過程中面臨多目標約束條件的限制,主要包括終端約束和過程約束。終端約束主要是落點、落角、落速約束,過程約束主要是過載、輸入、動壓、熱流、部分系統狀態約束。此外,還存在導引頭視場角約束,以及天線罩誤差、導引頭隔離度、執行器故障的容錯控制等大量實際要求。迄今為止,學者們在考慮多目標約束問題方面開展了大量研究,但是大部分工作屬于單目標或者少數目標約束,缺乏成熟的同時考慮全部過程和終端約束條件的俯沖段制導控制設計理論,因此開展工程意義上滿足多目標約束條件的制導控制方法具有重要意義。
考慮滿足工程多目標約束條件的制導控制器設計涉及大量控制參數的設計問題,而控制參數設計直接關系飛行品質和彈體穩定。高超聲速飛行器是一個包含大量不確定性的復雜非線性時變系統,而俯沖飛行階段具有高動態特性,增加了制導控制器參數的選取難度。目前一種解決方式是通過大量離線仿真試驗得到合適的控制參數組合,但是需要大量的時間和精力,而且實際的控制效果沒有理論保證。另外一種思路是將問題轉化為雙目標或者多目標優化問題,通過凸優化等算法進行參數尋優,但是涉及非凸系統的凸化問題,以及計算效率滿足飛行器快速性要求等方面的問題。因此,對滿足多目標約束條件的制導控制器的參數設計理論進行研究具有重要理論和工程應用價值。
3.3滿足綜合性能的制導控制智能算法
傳統的飛行器制導控制器是基于非線性和魯棒控制理論進行設計的,為了獲得滿意的控制性能,一般要求建立系統精確模型。但是高超聲速飛行器具有飛行大空域和寬速域特點,飛行環境復雜,難以通過大量地面試驗準確獲得全包絡氣動數據,也很難對飛行器的內部動力學解析關系進行準確建模,因此傳統的離線制導控制方式難以克服強烈不確定性造成的模型未知影響,無法對實際飛行過程中產生的誤差進行修正,引起控制精度下降甚至目標脫靶的情況。在線制導控制智能算法是一種基于飛行數據支持的,能夠根據實際飛行狀況不斷在線學習,克服模型未知條件,且模型精度隨時間逐漸收斂的新方法,是具有弱模型和無模型依賴特征的先進制導控制系統設計思路。
在線制導控制智能算法有利于進一步提升系統綜合性能。例如,利用強化學習算法能夠不斷生成制導控制智能體,并實時更新飛行控制策略,不斷校正實時飛行誤差,具有不依賴大量地面數值仿真的控制參數自動調整的能力[31],克服傳統離線控制方式在控制參數選擇方面的保守性。此外,在線制導控制智能算法有利于權衡系統在控制精度、控制能量、飛行時間等多種性能指標方面的獎勵函數,生成一種滿足綜合性能指標的控制器。另外,智能算法還能夠考慮執行器故障等特殊情況下的容錯控制,對于提高飛行器適應飛行環境突變和臨時任務突變的能力具有重要作用。
4結束語
高超聲速飛行器的出現和發展對既有戰爭模式具有顛覆式影響。高超聲速飛行器的制導控制系統面臨著以快時變、強不確定性、非匹配不確定性、多約束條件等為代表的復雜特性。本文針對高超聲速飛行器俯沖段制導控制一體化設計問題進行綜述,總結了主要的制導控制一體化設計模型,對模型特性和主要設計問題進行了分析總結,認為基于非線性和魯棒控制理論進行設計的傳統飛行器制導控制器,難以克服強烈不確定性造成的模型未知影響,無法修正飛行誤差,導致控制精度下降甚至目標脫靶,而在線制導控制智能算法將會是一種能夠在線學習,克服模型未知條件,具有弱模型和無模型依賴特征的先進制導控制系統。
參考文獻:
[1]DingYB,WangXG,BaiYL,etal.AnImprovedContinuousSlidingModeControllerforFlexibleAir-BreathingHypersonicVehicles[J].InternationalJournalofRobustandNonlinearControl,2020,30(14):5751-5772.
[2]SunXY,ChaoT,WangSY,etal.ReviewofStudiesonIntegratedGuidanceandControlDesignApproach[C]∥27thChineseControlandDecisionConference,2015.
[3]郭建國,楊勝江,魯寧波,等.基于Lyapunov方程的高超聲速飛行器變結構控制[J].現代防御技術,2021,49(6):1-8.
GuoJianguo,YangShengjiang,LuNingbo,etal.LyapunovEquation-BasedVariableStructureControlforHypersonicVehicles[J].ModernDefenceTechnology,2021,49(6):1-8.(inChinese)
[4]LiaoYX,LiHF,BaoWM.Three-DimensionalDivingGuidanceforHypersonicGlidingVehicleviaIntegratedDesignofFTNDOandAMSTSMC[J].IEEETransactionsonIndustrialElectronics,2018,65(3):2704-2715.
[5]卜祥偉.高超聲速飛行器控制研究進展[J].航空兵器,2018(1):47-61.
BuXiangwei.ProgressonFlightControlofHypersonicFlightVehicles[J].AeroWeaponry,2018(1):47-61.(inChinese)
[6]DingYB,WangXG,BaiYL,etal.NovelAnti-SaturationRobustControllerforFlexibleAir-BreathingHypersonicVehiclewithActuatorConstraints[J].ISATransactions,2020,99:95-109.
[7]穆凌霞,王新民,謝蓉,等.高超音速飛行器及其制導控制技術綜述[J].哈爾濱工業大學學報,2019,51(3):1-14.
MuLingxia,WangXinmin,XieRong,etal.ASurveyoftheHypersonicFlightVehicleandItsGuidanceandControlTechnology[J].JournalofHarbinInstituteofTechnology,2019,51(3):1-14.(inChinese)
[8]ZhangDH,MaP,WangSY,etal.Multi-ConstraintsAdaptiveFinite-TimeIntegratedGuidanceandControlDesign[J].AerospaceScienceandTechnology,2020,107:106334.
[9]王建華,程龍,劉黨輝,等.高超聲速飛行器制導控制及一體化設計方法[J].戰術導彈技術,2018(4):45-51.
WangJianhua,ChengLong,LiuDanghui,etal.ReviewofIntegratedGuidanceandControlSchemesforHypersonicVehicles[J].TacticalMissileTechnology,2018(4):45-51.(inChinese)
[10]ZhangDH,MaP,DuYQ,etal.IntegralBarrierLyapunovFunction-BasedThree-DimensionalLow-OrderIntegratedGuidanceandControlDesignwithSeekersField-of-ViewConstraint[J].AerospaceScienceandTechnology,2021,116:106886.
[11]王松艷,孫向宇,楊勝江,等.考慮輸入飽和的制導控制一體化設計[J].航空學報,2017,38(10):320897.
WangSongyan,SunXiangyu,YangShengjiang,etal.IntegratedGuidanceandControlDesignConsideringInputSaturation[J].ActaAeronauticaetAstronauticaSinica,2017,38(10):320897.(inChinese)
[12]顧攀飛,齊瑞云,郭小平.高超聲速飛行器再入自適應容錯制導控制一體化設計[J].南京航空航天大學學報,2018,50(6):763-775.
GuPanfei,QiRuiyun,GuoXiaoping.IntegratedDesignofReentryAdaptiveFault-ToleranceGuidanceandControlforHypersonicVehicle[J].JournalofNanjingUniversityofAeronautics&Astronautics,2018,50(6):763-775.(inChinese)
[13]WangL,ZhangWH,PengK,etal.AdaptiveCommandFilteredIntegratedGuidanceandControlforHypersonicVehiclewithMagnitude,RateandBandwidthConstraints[C]∥AsiaConferenceonMechanicalandAerospaceEngineering,2017.
[14]ChongZY,GuoJG,ZhaoB,etal.Finite-TimeIntegratedGui-danceandControlSystemforHypersonicVehicles[J].TransactionsoftheInstituteofMeasurementandControl,2021,43(4):842-853.
[15]趙暾,王鵬,劉魯華,等.帶落角約束的高超聲速飛行器一體化制導控制[J].控制理論與應用,2015,32(7):925-933.
ZhaoTun,WangPeng,LiuLuhua,etal.IntegratedGuidanceandControlwithTerminalAngularConstraintforHypersonicVehicles[J].ControlTheory&Applications,2015,32(7):925-933.(inChinese)
[16]王建華.高超聲速飛行器制導控制一體化設計方法研究[D].長沙:國防科學技術大學,2017.
WangJianhua.StudyonIntegratedGuidanceandControlDesignApproachforHypersonicVehicles[D].Changsha:NationalUniversityofDefenseTechnology,2017.(inChinese)
[17]WangJH,ChengL,CaiYW,etal.Low-OrderDivingIntegra-tedGuidanceandControlforHypersonicVehicles[J].AerospaceScienceandTechnology,2019,91:96-109.
[18]ChaoT,QuanSM,MaP,etal.Three-DimensionalLow-OrderFinite-TimeIntegratedGuidanceandControlDesignwithSide-WindowConstraint[J].AerospaceScienceandTechnology,2022,121:107355.
[19]AnT,WangJH,PanYL,etal.ALow-OrderPartialIntegratedGuidanceandControlSchemeforDivingHypersonicVehiclestoImpactGroundManeuverTarget[J].MathematicalProblemsinEngineering,2021:7407739.
[20]WangJH,CaiYW,ChengL,etal.ActiveDisturbanceRejectionGuidanceandControlSchemeforHomingMissileswithImpactAngleConstraints[J].ProceedingsoftheInstitutionofMechanicalEngineers,PartG:JournalofAerospaceEngineering,2019,233(3):1133-1146.
[21]DingYB,YueXK,ChenGS,etal.ReviewofControlandGuidanceTechnologyonHypersonicVehicle[J].ChineseJournalofAeronautics,2022,35(7):1-18.
[22]HouYZ,DongCY,WangQ.StabilityAnalysisofSwitchedLi-nearSystemswithLocallyOverlappedSwitchingLaw[J].JournalofGuidance,Control,andDynamics,2010,33(2):396-403.
[23]王建華,劉魯華,湯國建.高超聲速飛行器俯沖段制導與姿控系統設計[J].宇航學報,2016,37(8):964-973.
WangJianhua,LiuLuhua,TangGuojian.GuidanceandAttitudeControlSystemDesignforHypersonicVehicleinDivePhase[J].JournalofAstronautics,2016,37(8):964-973.(inChinese)
[24]王建華,劉魯華,王鵬,等.高超聲速飛行器俯沖段制導控制一體化設計方法[J].航空學報,2017,38(3):320328.
WangJianhua,LiuLuhua,WangPeng,etal.IntegratedGui-danceandControlSchemeforHypersonicVehiclesinDivePhase[J].ActaAeronauticaetAstronauticaSinica,2017,38(3):320328.(inChinese)
[25]GuoJG,XiongY,ZhouJ.ANewSlidingModeControlDesignforIntegratedMissileGuidanceandControlSystem[J].AerospaceScienceandTechnology,2018,78:54-61.
[26]YangSJ,GuoJG,ZhouJ.NewIntegratedGuidanceandControlofHomingMissileswithanImpactAngleAgainstaGroundTarget[J].InternationalJournalofAerospaceEngineering,2018(2):3968242.
[27]孫冰,陳偉.抗控制飽和的魯棒非線性飛行控制方法[J].北京航空航天大學學報,2021,47(12):2475-2483.
SunBing,ChenWei.RobustNonlinearFlightControlMethodagainstControlSaturation[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2021,47(12):2475-2483.(inChinese)
[28]ZhaoT,WangP,LiuLH,etal.IntegratedGuidanceandControlwithL2DisturbanceAttenuationforHypersonicVehicles[J].AdvancesinSpaceResearch,2016,57(12):2519-2528.
[29]王青,王通,董朝陽.切換多胞飛行器的變增益H∞跟蹤控制[J].宇航學報,2015,36(10):1133-1139.
WangQing,WangTong,DongChaoyang.VariableGainH∞TrackingControlforSwitchedPolytopicVehicle[J].JournalofAstronautics,2015,36(10):1133-1139.(inChinese)
[30]王通,王青,江未來,等.基于切換多胞模型的變體飛行器增益調參控制[J].北京航空航天大學學報,2014,40(1):75-79.
WangTong,WangQing,JiangWeilai,etal.GainScheduleControlofMorphingVehicleBasedonSwitchedPolytopicSystem[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2014,40(1):75-79.(inChinese)
[31]裴培,何紹溟,王江,等.一種深度強化學習制導控制一體化算法[J].宇航學報,2021,42(10):1293-1304.
PeiPei,HeShaoming,WangJiang,etal.IntegratedGuidanceandControlforMissileUsingDeepReinforcementLearning[J].JournalofAstronautics,2021,42(10):1293-1304.(inChinese)
[32]韓京清.自抗擾控制技術:估計補償不確定因素的控制技術[M].北京:國防工業出版社,2008.
HanJingqing.ActiveDisturbanceRejectionControlTechnique:TheTechniqueforEstimatingandCompensatingtheUncertainties[M].Beijing:NationalDefenseIndustryPress,2008.(inChinese)
[33]LiZB,DongQL,ZhangXY,etal.ImpactAngle-ConstrainedIntegratedGuidanceandControlforSupersonicSkid-to-TurnMissilesUsingBacksteppingwithGlobalFastTerminalSlidingModeControl[J].AerospaceScienceandTechnology,2022,122:107386.
[34]SwaroopD,GerdesJC,YipPP,etal.DynamicSurfaceControlofNonlinearSystems[C]∥AmericanControlConference,1997:3028-3034.
[35]韋俊寶,李海燕,李靜.高超聲速飛行器新型攻角約束反演控制[J].系統工程與電子技術,2022,44(4):1310-1317.
WeiJunbao,LiHaiyan,LiJing.NovelBacksteppingControlforHypersonicVehiclewithAngleofAttackConstraint[J].SystemsEngineeringandElectronics,2022,44(4):1310-1317.(inChinese)
[36]WangJH,LiuLH,ZhaoT,etal.IntegratedGuidanceandControlforHypersonicVehiclesinDivePhasewithMultipleConstraints[J].AerospaceScienceandTechnology,2016,53:103-115.
[37]趙暾,王鵬,劉魯華,等.帶有模糊干擾觀測器的高超聲速飛行器一體化制導控制方法[J].國防科技大學學報,2016,38(5):86-93.
ZhaoTun,WangPeng,LiuLuhua,etal.IntegratedGuidanceandControlofHypersonicVehiclewithFuzzyDisturbanceObser-ver[J].JournalofNationalUniversityofDefenseTechnology,2016,38(5):86-93.(inChinese)
[38]WangL,PengK,ZhangWH,etal.NeuralExtendedStateObserverBasedIntelligentIntegratedGuidanceandControlforHypersonicFlight[J].Energies,2018,11(10):2605.
[39]BaoCY,WangP,TangGJ.IntegratedGuidanceandControlforHypersonicMorphingMissileBasedonVariableSpanAuxiliaryControl[J].InternationalJournalofAerospaceEngineering,2019(1):6413410.
[40]田國兵.帶落角約束的BTT飛行器制導控制一體化方法研究[D].哈爾濱:哈爾濱工業大學,2011.
TianGuobing.IntegratedGuidanceandControlforBTTMissilewithTerminalImpactAngleConstraint[D].Harbin:HarbinInstituteofTechnology,2011.(inChinese)
[41]LinL,WangSY,ChaoT,etal.TheDesignofIntegratedGui-danceandControlLawConsideringRudderAngleSaturation[C]∥ChineseControlandDecisionConference,2019.
[42]張健,慕小武.Nussbaum函數及其在系統鎮定中的應用研究[J].數學的實踐與認識,2017,47(20):239-245.
ZhangJian,MuXiaowu.NussbaumFunctionandItsApplicationinSystemStabilization[J].MathematicsinPracticeandTheory,2017,47(20):239-245.(inChinese)
[43]WangWH,XiongSF,WangS,etal.ThreeDimensionalImpactAngleConstrainedIntegratedGuidanceandControlforMissileswithInputSaturationandActuatorFailure[J].AerospaceScienceandTechnology,2016,53:169-187.
[44]LiuWK,WeiYY,HouMZ,etal.IntegratedGuidanceandControlwithPartialStateConstraintsandActuatorFaults[J].JournaloftheFranklinInstitute,2019,356(9):4785-4810.
[45]WangZ,YuanJP.FuzzyAdaptiveFaultTolerantIGCMethodforSTTMissileswithTime-VaryingActuatorFaultsandMultisourceUncertainties[J].JournaloftheFranklinInstitute,2020,357(1):59-81.
[46]ZhuJW,LiuLH,TangGJ,etal.Three-DimensionalNonlinearCouplingGuidanceforHypersonicVehicleinDivePhase[J].ScienceChina:TechnologicalSciences,2014,57(9):1824-1833.
[47]趙斌,梁樂成,蔣瑞民,等.終端角度約束制導及制導控制一體化方法綜述[J].宇航學報,2022,43(5):563-579.
ZhaoBin,LiangLecheng,JiangRuimin,etal.ReviewofGui-danceandIntegratedGuidanceandControlMethodsunderTerminalAngleConstraints[J].JournalofAstronautics,2022,43(5):563-579.(inChinese)
[48]LiuWK,WeiYY,DuanGR.BarrierLyapunovFunction-BasedIntegratedGuidanceandControlwithInputSaturationandStateConstraints[J].AerospaceScienceandTechnology,2019,84:845-855.
[49]溫求遒,黃文宇,盧寶鋼.基于LSTM的落速控制最優制導策略研究[J].北京理工大學學報,2022,42(5):511-522.
WenQiuqiu,HuangWenyu,LuBaogang.ResearchonOptimalGuidanceStrategyofTerminalSpeedControlBasedonLSTM[J].TransactionsofBeijingInstituteofTechnology,2022,42(5):511-522.(inChinese)
[50]GuoJ,ZhouJ,ZhaoB.Three-DimensionalIntegratedGuidanceandControlforStrap-DownMissilesConsideringSeekersField-of-ViewAngleConstraint[J].TransactionsoftheInstituteofMea-surementandControl,2020,42(6):1097-1109.
OverviewofIntegratedGuidanceandControlfor
HypersonicVehiclesinDivePhase
GuoJianguo,LiangLecheng*,ZhouMin,JiangRuimin
(InstituteofPrecisionGuidanceandControl,NorthwesternPolytechnicalUniversity,Xian710072,China)
Abstract:Theintegratedguidanceandcontrol(IGC)problemforhypersonicvehiclesindivephaseisreviewedfromtheperspectiveofmodelconstructionandmethoddesigninthispaper.Firstly,thispapersummarizesmodelconstructionofIGCindivephase.Inthesequenceofintegrationimprovingdegree,itintroducesIGCmodelofindividualchannels,couplingfullstatehigh-orderIGCmodel,improvedintegratedlow-orderIGCmodel,andanalyzesandsummarizesthecharactersofhypersonicvehiclessystemanddesignmodels,thenpointsouttypicalproblemsofsystemfacedinmethoddesign.Secondly,withrespecttodesigndifficultiesofIGCsystemindivephase,thispaperreviewsdesignmethodsfromviewsofrobustcontrolunderstronguncertainties,controlmethodsunderhigh-ordermismatcheduncertaintiesandcontrolmethodswithmultipleconstraints.Itpointsoutthecurrentdevelopmentandexistingproblemsofrelatedtheoriesathomeandabroad.Finally,theIGCforhypersonicvehiclesindivephaseisforecasted.
Keywords:hypersonicvehicle;integratedguidanceandcontrol;divephase;uncertainty;multipleconstraints;robustcontrol