足式機器人足力及平衡控制方法設計
2023-05-30 13:15:40袁鵬飛
中國科技縱橫 2023年6期
袁鵬飛
(長安大學工程機械學院,陜西西安 710064)
近年來,隨著科學家對自然界探索的不斷深入,各領域中對能夠在復雜環境中自由移動機器人的需求日趨廣泛[1]。足式機器人因為其腿部所具有的大量自由度使其運動更加靈活[2],這種機器人能夠在復雜環境中穩定地行走,本文基于此展開足力控制和機身平衡方面的控制設計。
1.控制體系介紹
本文所設計的機器人整機控制框架如圖1 所示。操控者可以使用遙控器控制機器人的轉向,運動步態、速度,這些運動模式通過機身全向運動和足端軌跡算法實現。位置控制內環使用基于關節轉角的PID 控制器來維持機器人的基本轉角控制。當機器人腿部由擺動狀態進入支撐狀態時,通過力傳感器實時采集的足端受力,以阻抗控制器實現對足端受力的實時控制,同時通過IMU 采集的機身高度和機身姿態數據利用PID 控制機身,這三環反饋控制共同作用實現在觸地過程中受力穩定,機身平穩,高度可控的運動效果。
2.足力控制方法
一般而言,地面模型可以簡化為單自由度的質量-彈簧-阻尼系統[3],模型如圖2所示。但是在機器人應用中,由于機器人足端的運動速度和加速度都比較小,本文在此只考慮位置項的作用,而不考慮阻尼和慣性的作用效果。這時足端接觸力是由機器人足端與環境的變形引起的,系統被簡化為一個線性系統,可以得到足端受力為:
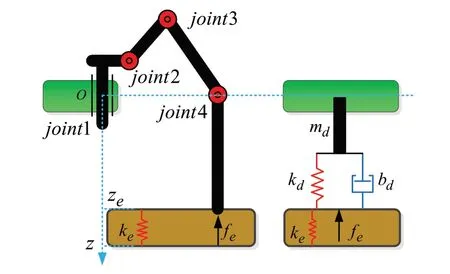
圖2 地面模型和腿部阻抗模型
式中,z為機器人足端的實際位置,ze為環境的位置,ke為接觸環境等效剛度。
同樣,機器人腿部阻抗方法也是將腿部等效于質量塊-阻尼-彈簧系統。在此用md、bd、kd分別代表機器人腿的期望阻抗模型的慣性矩陣、剛度矩陣以及阻尼矩陣。zr表示足端期望位置,系統模型如圖2 所示。
為了實現對力的控制,在此引入一個參考力fr作為期望受力。并將其與機器人足端接觸力作差fe=fr-f,可以得到力誤差,此時系統變為:
對式作拉普拉斯變換可得到其頻域表達式[4]:
可見阻抗方法是一個二階系統,將輸入的力轉化成一個位置差,實時對位置進行補償修正。
3.機身姿態平衡和高度控制
在加入阻抗方法后,由于機身運動過程中的動態性能,各腿的末端豎直方向軌跡實時改變,必然會影響機器人機身的姿態,使得機器人機身傾斜并失去平衡[5]。為了解決出現這個問題,本設計中實時讀取機身姿態俯仰和橫滾的角度和角速度和機身高度信息,采用PID 控制方法形成第二環及第三環位置補償,以保證在解決緩沖的作用下還能對機身姿態和高度都得以控制。
俯仰和橫滾形成的機身姿態位置補償可以表示為:
機身高度h可以通過各關節的轉角反饋結合正運動學計算得出,此時機身高度控制的位置補償為:
式中,Δp表示由機身俯仰角α變化引起的位置補償,Δr表示由機身橫滾角變化引起的位置補償,Δh由機身高h度變化引起的位置補償。α0、β0和h0表示期望的俯仰角、橫滾角和機身高度,表示期望的俯仰角速度,橫滾角速度和機身高度變化的速度。kpr、kdr、kpr、kdp、kph和kdh為位置補償的比例參數和微分參數。
4.實驗
如前文所述,為了在機器人足端期望力得到穩定的控制下,還希望機身姿態和高度能夠穩定,結合式(4)和式(5),即有機器人豎直z方向的位置補償為Δ=Δz+Δr+Δp+Δh。設定,設定期望機身高度為h0=130mm,支撐相時希望機身高度穩定,即需要。阻抗設定為過阻尼狀態[6],設定參數為md=1,bd= 300,kd=2000,ke=10000。實驗中讓六足機器人首先從平坦地面開始原地擺動,通過交替的踩踏硬質物(啞鈴)和軟質物(泡棉)來模擬不同地面環境,機器人以三角步態原地踏步運動,實驗效果如下。
機器人在原地踩踏時的足端受力如圖3 所示,平地運動時各腿受力的紅色線在此設定為期望力,藍色線表示運動過程經過力傳感器采集到的足端實際受力。可見,在引入阻抗控制后,機器人腿足端的實際受力能夠很好地跟隨設定的期望力,保證機器人足端穩定接觸地面。圖4 顯示了機器人從靜態的六足支撐開始起擺,一條腿交替踩踏海綿和啞鈴,其他腿仍踩踏地面,由各腿在方向的坐標變化可見,機器人在三角步態運動模式下,支撐相腿能夠較快地穩定在設定的期望高度上,整個支撐過程位置穩定。引入機身姿態反饋后,機身的姿態數據如圖5 所示,可見機器人運動時能夠保持機身俯仰和橫滾角穩定。
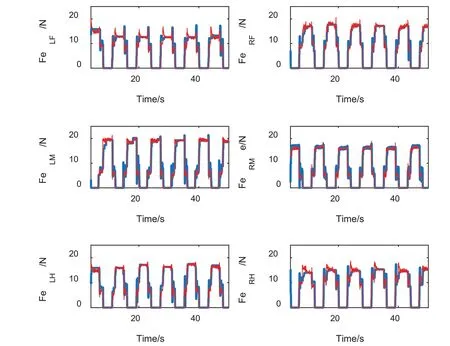
圖3 機器人運動時各腿受力圖
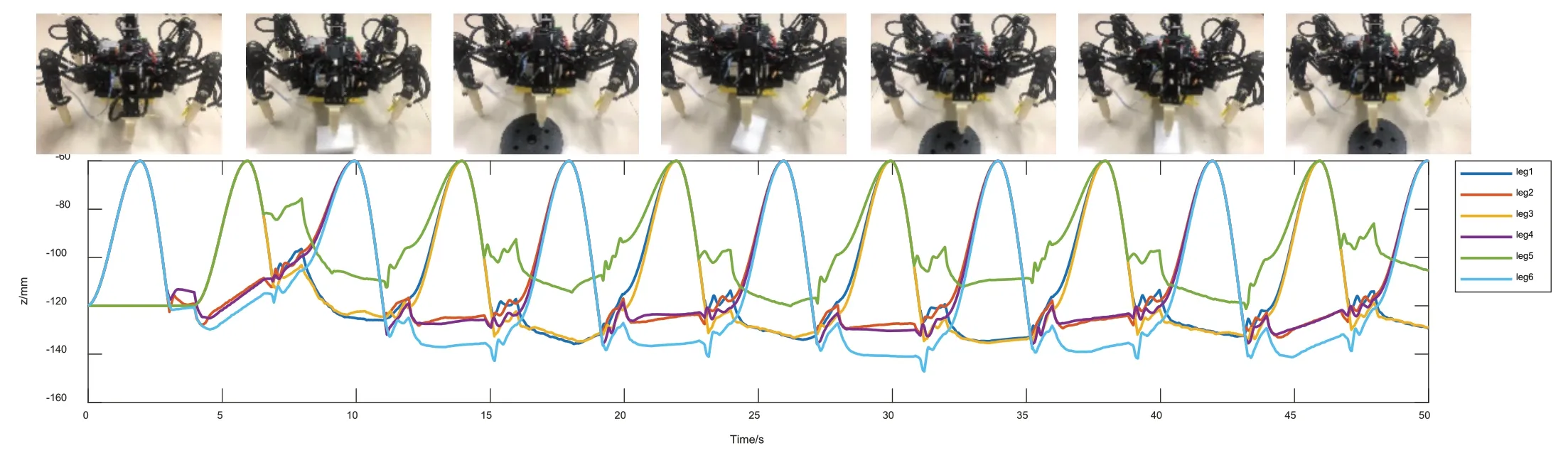
圖4 機器人運動時各腿實際軌跡
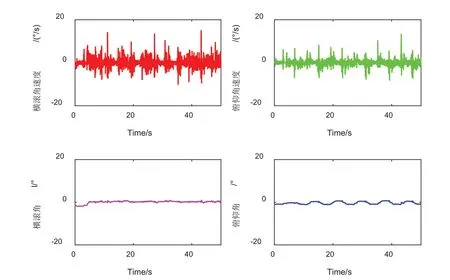
圖5 機器人運動時機身姿態
5.總結
本文設計的這種基于位置控制的阻抗控制方法,通過實時采集的足端受力數據和機身姿態數據對腿部加以控制,能很好地提升機器人在非規則地面和變剛度地面下運動的穩定性,并且能維持機器人柔順的運動。