港內狹水道追越的引航實操分析
2023-06-06 03:27:12張良
中國水運 2023年5期
關鍵詞:規則
張良
(上海港引航站,上海 200082)
1 追越的含義及判斷
《1972 年國際海上避碰規則》中明確規定:“當一艘船在他船的正橫角后面大于22.5 度的某個方向追上或超過他船時,就是該船對其所追越船所處的位置,如果一艘船在晚上僅能看到被追趕船的尾部燈光,卻看不到被追越船的任何一側燈光,則被視為正在追越中。”按照上述要求,一艘船追越另外一艘船,必須滿足下列要求:
(1)方位。后一艘船必須在所追越船大于22.5 度的任一方向上,也就是位于所追越船尾燈的照射范圍之內,換句話說,在晚上才能看到它所追越船只的尾部光線,而不能看到所追越船的側面燈光。這就是追越船只和被追越船的方位關系。
(2)速率。后船要想追趕上前船,其速率必須比前船的速率要大,只有這樣才能追越到前船,這就是所謂的追越船與被追越船的動態關系。
(3)間距。追越船應在被追越船只的尾部光線可照射的范圍之內,也就是說,在夜晚才能看見被追越船只的尾部,在白天兩艘船只已經快在對方尾燈所照射的范圍內了。
《1972 年國際航海避撞規則》第13 條明文規定:如果一艘船只對其是否正在追越另一艘船只不確定,則這艘船只應當假設正在追越,并據此作出反應。在一般的情形下,追越船對其是否被追越中抱有疑慮,其原因有以下兩種:
(1)為避免燈光盲點,將船頭、尾部燈光的水平線弧線向前、向后各延長5°。因此,當前船正向后傾斜22.5°的時候,后船很有可能會同時看見前船的舷燈和尾部燈光,因此對倆船是否處于追越狀態心存疑慮。
(2)當后船位于前船正橫后22.5°附件或者因倆船船頭方向的不確定性,后船偶爾能夠看到前船的尾部燈光和舷燈,因此對倆船是否處于追越狀態心存疑慮。
(3)追越不以有無發生碰撞的危險為適用條例
《1972 年國際海上避碰規則》對“追越”進行了界定,但并未提及“碰撞危險”,這一點與“該規則”的其它條款截然不同,這一點也為近年來一直探討的追越條例的適用是否要構成碰撞危險時的爭議提供了解決方案。
2 追越中的避讓責任
2.1 追越船的責任
《1972 年國際海上避碰規則》第13 條第1 款中指出:“根據第2 章第1 條和第2 條中所述的條款,任何船只在追趕其他船只時,都必須為被追趕船只騰出空間”。第4 款中指明:“以后兩個船只之間的位置發生改變時,不能將追越船只視為本條例含義中所提出的交匯船只,依照“任一船只在追越任何他船時,都要給被追越船讓道。”的規定,在追趕的過程中,追趕的船只應該負起讓路的職責,無論它的位置、方向有多大的變化,甚至出現什么意外,它也應該負起相應的責任,并且不得逃避。當發生追越行為時,任何變動都不能被視為本規則中所規定的交叉船,也不應該對被追越船負責,直到最終通過讓清為止。特別是當追越行為發生在他船的右舷上方時。
因此,在狹水道、航道和密散的航道上,如果沒有十足的把握,就不要去追趕其他船只,尤其是本地的小型船只,以免它們在接近時候突然改變方向橫穿本船前方,或由于設備故障而失靈造成的碰撞事故,只要發生碰撞就一定是本船承擔主要責任。
“兩艘船之間方位的變化”可以概括為以下三種:
(1)在相向追越時,由于后艦進入了前艦尾燈有效區域內,使兩艦之間的相對距離發生了改變。
(2)當兩艘船只在一個方向上并排追越時,追越船只的方向發生變化,使兩艘船只的方向相交,有發生碰撞的危險。
(3)當兩艘船只在并行追越時,當被追越船只的航線發生變化時,使得兩艘船只的航線相交,產生了相撞的危險。
無論《規則》其他條款怎樣規定,追越方都必須承擔“讓道”的責任和義務,無論追越方是否為“不得受到阻礙的船只”,或根據有關條款認定為“直航船”“吃水的船只”“無法操縱的船只”“失控的船只”“舵機或主機發生故障”等,只要處于追越狀態,追越方對被追越方的責任和義務都不會因此而發生改變,因此,無論其他條款作出怎樣的規定,或被追越方采取怎樣的行為,追越方都必須對被追越方承擔“駛過讓清”的責任和義務。
2.2 被追越船的責任:
在海上,被追越船舶在直航時,必須嚴格遵循《海洋避撞規則》中關于直航船舶航行的條款,在狹窄水道、港口和內河航道中,由于所處海域的局限性,如果被追越船舶同意追越,則必須發出信號,以示支持,并通過讓渡航道或降低速度來幫助避讓。《海洋避免碰撞條例》指出:“在狹窄的水路或通道中,只能在被追越船舶為保證安全通行而采取行為時,若被追越船舶同意,則應發出適當的信號,并采取相應措施,保證其安全通行”。同時,《內河避撞規則》還指出:“如果航道狀況和周邊情況許可,被追越船只應接受追越,并且應盡量讓開一段航線,降低速度,以幫助對方避讓。”所以,在狹窄水道、港口、長江等水域中,在航道狀況及周邊情況許可的情況下,被追越船應接受追越船的追越,并為其提供幫助,為實現追越船的職責與義務而提供幫助。
3 具體實例分析
下面以“Esso Seattle”號和“Guam Bear”號兩船相撞為例,說明狹水道條款與狹水道操縱避碰的關系。
3.1 碰撞經過
當“Esso Seattle”(E 船)和“Guam Bear”(G船)駛出阿普拉港入口時,兩艘船只發生了碰撞。當距離入口處 0.5 n mile 時,E 船的引航員離開了船只,登上了一艘拖船,隨后E 船的船長操控著它。在引航員離船之前,E 船的船長和三副從駕駛臺穿越防波堤,發現了G 船的桅燈,E 船船長預計這艘船會在外面等候。但是,當船長發現G 船正在入口處時,船長立即下令,以214°的航向,繼而以125°的航向,直接駛向港口的進口。當G 號船接近1 號浮標600 yard 的位置,三名引航員隨即從駕駛臺上下來,而E 號船的船長則站在駕駛臺的左側,目睹著引航員的離去以及拖船的運行,持續5 分,最終,船長又返回操舵室,發出了一聲全速前進的指令。當G 船穿越防波堤,以驚人的速度朝著進口方向行去時,E 船也跟隨而至,兩者之間發生了一次重要的交匯。E 船船長立刻明白,G 船已經決定停靠,于是,他發出了兩次短促的汽笛,指揮左舵,朝著標記為進口的南浮標的北側前行。E 船在等待20~25 s 之后,突然發出了兩次短暫的警報,但是沒有引起其他船只的注意。隨著E 船第二次發出的警報,G 船可能發出了四次短暫的警報,而這些警報與 E 船的警報混合在一起。G 船發出信號 1 min 之后,E 船繼續保持原來的航向,一直注視著它,直到它停止朝左移動,以便能夠順利地穿越右舷。當它發現G 船沒有朝左移動,E 船便立刻調整主機,以最快的速度向后退,并且完全掌握了右舵。此刻,G 船的船頭幾乎處于最前沿,因此,碰撞是不可避免的。在發出一聲號之后,G 船迅速地將主機停下,以最快的速度向前駛去,并且立即轉向左舵,希望能夠將船尾甩向右邊,以避開正在靠近的E 船。然而,當它接近2 號浮標時,E 船的船頭以30°至45°的斜角撞上了 G 船的左舷,并且稍后一點處受到了撞擊。當兩艘船發生碰撞時,E 船的速度約為 9kn,而G 船的速度則達到了10 kn,隨后,G 船被推向阿普拉港的海灘,最終,它的殘骸被海軍拖出,沉沒在海底。
3.2 碰撞原因分析
(1)無論何時船只都必須運用可靠的技術,包括視覺、聽覺、觸覺等,來準確地觀察當前的狀態,并且要根據“正規瞭望”的時間表,尤其要注意狹窄的航行空間,以確定最佳的航行時間,避免發生碰撞事故!由于這個原因,兩艘船都犯了錯誤。
(2)由于船未能及時測量出其方向,以及未能及時采取行動以防止發生碰撞,因此,它們未能盡責地在狹窄的河流中運行,也未能發揮出其應有的船舶技術。
(3)阿普拉港和關島港的狹窄水道規則要求離港船 E 船必須嚴格遵守,任何企圖從右舷通過的行為都將受到嚴厲的懲罰,而且在收到本船二短聲的建議之前,必須立即向左轉向。
(4)雖然美國相關部門可能存在未及時檢測和記錄船只之間的無線電通訊,但這并非導致兩艘船只在港口入口處相遇的最終原因,而是由于雙方都密切監視著彼此的行蹤。
3.3 位置追越
因為航道的限制,許多航道都是狹窄的,這使得它們的航行條件與公海的寬廣水域有很大的差別。在這些航道上,船只非常密集,而且航道的路線非常復雜,有許多轉彎處和直航道的交叉點,這使得航行者經常遇到擁堵、多船交錯、船只聚集的情況。
在狹窄的水道上,只有當水域足夠寬闊,以確保船只安全航行時,才會進行追越,而在沒有這樣的條件的情況下,就會放棄追趕的目的,以便更好地保證船只的安全。并采取無法追趕的行動。在進行位置追趕時,需要注意幾個重要的因素:
(1)充足的水域提供給追越船。涉及兩個主要概念,第一,寬度越大的航道,水域就越豐富,可以滿足航行需求;第二,隨著船只尺寸的減少,水域的寬度也會變得更加寬敞。
(2)根據避碰規則第九條,狹窄的水道第一款要求,當船只接近被追趕的船時,應該盡量將其右舷靠攏,以確保安全。以便更好地觀察周圍的情況。在港口航行中,由于環境的復雜性和變化性,經常會出現向左駛去的船只,因此,在航線的兩側,應該盡量選擇向右或向左駛去,統稱為:靠邊航行。
某國際航道寬度300 米,限速12 節,船長(L ≥260米)單向封航,判斷是否追越,如圖1 所示。
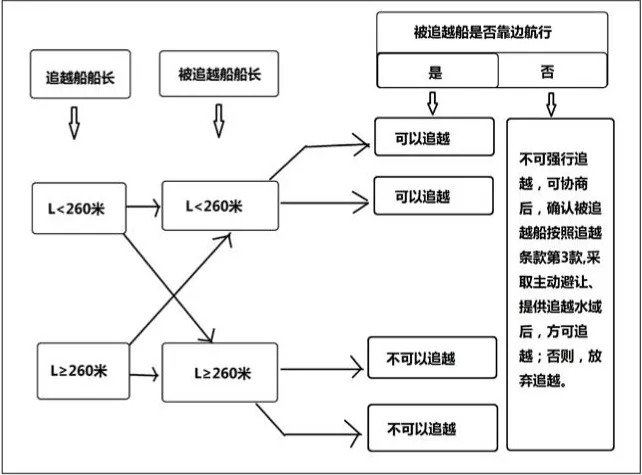
圖1 追越判斷圖
港內峽水道位置追越的核心思想,并不僅僅是追越條款的第(1)款中描述的追越船給被追越船讓路,而是兩船都具有“良好的船藝”的思想基礎上,雙方共同完成追越。
(3)附近其他船舶。能力要求:通過利用船上的各種設備,如雷達和ECDIS,可以獲取附近船只的速度和距離,并根據計算出的交匯點的位置和時間,確認是否在追趕距離和時間范圍內,如果不在,則放棄追趕。如果有多艘船只在競相追趕,只要其中一艘能夠在規定的距離和時間內完成任務,就應該放棄追趕。
如果B 船仔細檢查了C 船的航行路線、航向以及航行時間,并且考慮到追趕的可能性,那么就可以考慮不去追趕。
3.4 風流因素
在航行的全部過程中,風壓和流壓是不可或缺的重要參數,而且根據實驗結果,隨著船只的加速,其轉向也會變得更加迅猛。
(1)在流動壓力保持穩定的前提下,船尾所承受的重量比船頭更加沉重,因此,除了船身的總體上的橫向運動,船尾也會出現明顯地向下游的傾斜。
(2)由于船型的限制,目前的船只結構中,駕駛臺的位置較為突出,而且承受的風力也更加強烈,因此,駕駛臺的一端會朝著更低的風速傾斜。
(3)當船只在港口航行時,由于每段航線的風壓和流速都有所差異,因此在實際操作中應該根據情況進行處理。
4 結語
能力需求:經過多年的指揮,引航員們不僅學會了如何觀察周圍的環境,還培養出了對船只橫向運動的靈敏度。
追越的三要素:駕駛員在追趕目標的過程中,必須時刻關注距離、速度和方向,并能夠及時發現問題并采取積極有效的行動。為了將理論轉化為實際操作,駕駛員必須熟練掌握ECDIS、WEB 互聯網、雷達和AIS 系統等船上導航系統,并能夠使用高頻設備。此外,駕駛員還必須經常進行心算訓練,并考慮人為因素,以及掌握基本的引航技能和風險預設。通過制定一整套應急計劃,在面對是否需要追趕的問題時,能夠快速做出決策,確保安全航行。
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42
