智能車自主換道超車控制方法研究
2023-06-07 00:22:18許小偉崔金融嚴(yán)運(yùn)兵馬霽旻王亞瑋
武漢科技大學(xué)學(xué)報(bào) 2023年3期
許小偉,崔金融,嚴(yán)運(yùn)兵,馬霽旻,王亞瑋
(1.武漢科技大學(xué)汽車與交通工程學(xué)院,湖北 武漢,430065; 2.智新科技股份有限公司,湖北 武漢,430056;3.華中科技大學(xué)電氣與電子工程學(xué)院,湖北 武漢,430074)
智能車換道超車是一種常見的駕駛行為,其中換道時(shí)刻的選擇和高速換道行駛過程中的安全性需要重點(diǎn)關(guān)注,必須解決換道決策、路徑規(guī)劃以及軌跡跟蹤等多個(gè)關(guān)鍵技術(shù)問題[1]。
換道行為涉及到多個(gè)車道,由于人工勢(shì)場理論簡單且直觀,因此被廣泛用于量化道路的動(dòng)態(tài)環(huán)境。張朋[2]利用人工勢(shì)場法對(duì)道路的動(dòng)態(tài)環(huán)境復(fù)雜度進(jìn)行建模,并對(duì)提出的量化模型進(jìn)行實(shí)驗(yàn)標(biāo)定。李林恒等[3]為了直觀地表達(dá)智能車在換道過程中面臨的風(fēng)險(xiǎn),選用人工勢(shì)場法建立換道模型,并利用國內(nèi)道路環(huán)境進(jìn)行模型標(biāo)定。朱乃宣等[4]借助人工勢(shì)場理論量化前車產(chǎn)生的風(fēng)險(xiǎn)場場強(qiáng),依據(jù)駕駛風(fēng)格來設(shè)計(jì)不同的規(guī)劃閾值而達(dá)到個(gè)性化換道的目的,但是換道觸發(fā)時(shí)刻僅考慮前車的影響,未考慮換道對(duì)相鄰車道正常行駛車輛造成的影響。
軌跡跟蹤的目的是使車輛按照規(guī)劃的路徑行駛。目前智能車軌跡跟蹤方法主要有PID控制、模型預(yù)測(cè)控制和LQR控制等,其中LQR控制能考慮到多項(xiàng)性能指標(biāo)且實(shí)時(shí)性好,因此得到廣泛應(yīng)用。陳亮等[5]構(gòu)建了加入前饋控制的LQR控制器,有效減少了跟蹤誤差。胡杰等[6]根據(jù)車速變化對(duì)LQR權(quán)重系數(shù)進(jìn)行模糊調(diào)節(jié),并驗(yàn)證了控制器在實(shí)車環(huán)境中的控制性能。高琳琳等[7]對(duì)LQR控制器的權(quán)重矩陣進(jìn)行了自適應(yīng)調(diào)整。然而,模糊調(diào)節(jié)和自適應(yīng)調(diào)整權(quán)重都是依靠經(jīng)驗(yàn)設(shè)計(jì),并不能保證輸出最優(yōu)的控制量。
針對(duì)上述問題,本文基于人工勢(shì)場理論量化道路風(fēng)險(xiǎn)場,建立換道規(guī)則,并借助最小縱向安全距離來判斷換道的安全性,同時(shí)通過改進(jìn)的LQR控制器對(duì)換道軌跡進(jìn)行跟蹤。本文最后利用Carsim和Simulink搭建聯(lián)合仿真平臺(tái),來驗(yàn)證所提出的換道超車決策的有效性以及軌跡跟蹤控制器的效果。
1 道路風(fēng)險(xiǎn)場設(shè)計(jì)
本文基于人工勢(shì)場理論計(jì)算車輛正常行駛過程中遇到的風(fēng)險(xiǎn)水平,并建立道路風(fēng)險(xiǎn)場,包括障礙車輛風(fēng)險(xiǎn)場和引導(dǎo)風(fēng)險(xiǎn)場。障礙車輛風(fēng)險(xiǎn)場考慮了障礙車輛的自身屬性,引導(dǎo)風(fēng)險(xiǎn)場考慮了主車與周圍車輛的相對(duì)位置和相對(duì)速度。
1.1 障礙車輛風(fēng)險(xiǎn)場
障礙車輛風(fēng)險(xiǎn)場涉及換道車輛與周圍車輛的相對(duì)運(yùn)動(dòng)狀態(tài)。由實(shí)際交通流可知,車輛換道過程中,在縱向上,換道車輛接近周圍車輛時(shí),風(fēng)險(xiǎn)場會(huì)不斷增強(qiáng),且車輛相對(duì)距離越近,場強(qiáng)的增長幅度越大;在橫向上,允許換道車輛以較小的換道距離超越前車,且前車的風(fēng)險(xiǎn)場應(yīng)盡可能地不影響相鄰車道。綜上,選用二次高斯函數(shù)模型[8]來表示周圍車輛的場強(qiáng),建立障礙車輛勢(shì)場Uobst。
Uobst=
(1)
?x,obst=kxLobst
(2)
?y,obst=kyWobst
(3)
式中:x、y分別為換道車輛質(zhì)心的縱、橫向坐標(biāo);xobst、yobst分別為障礙車輛質(zhì)心的縱、橫向坐標(biāo);Aobst為障礙車輛的場強(qiáng)幅值,本文取值為1;?x,obst、?y,obst分別為障礙車輛產(chǎn)生的勢(shì)場在縱向和橫向上的影響范圍;Lobst、Wobst分別為障礙車輛的長度和寬度;kx、ky分別為障礙車輛在x、y方向上的縮放系數(shù),考慮到實(shí)際超車過程中障礙車輛只對(duì)同車道后車產(chǎn)生影響,而對(duì)同向相鄰的車道影響很小甚至沒有影響,故取kx=1,ky=0.5。
構(gòu)建圖1所示的換道超車場景,道路環(huán)境為同向行駛的三車道,規(guī)定向右行駛為正方向,文中均以A車為主車構(gòu)建行駛風(fēng)險(xiǎn)場,其余車輛視為周圍的障礙車輛,各車輛行駛狀態(tài)參數(shù)見表1。

表1 車輛狀態(tài)參數(shù)
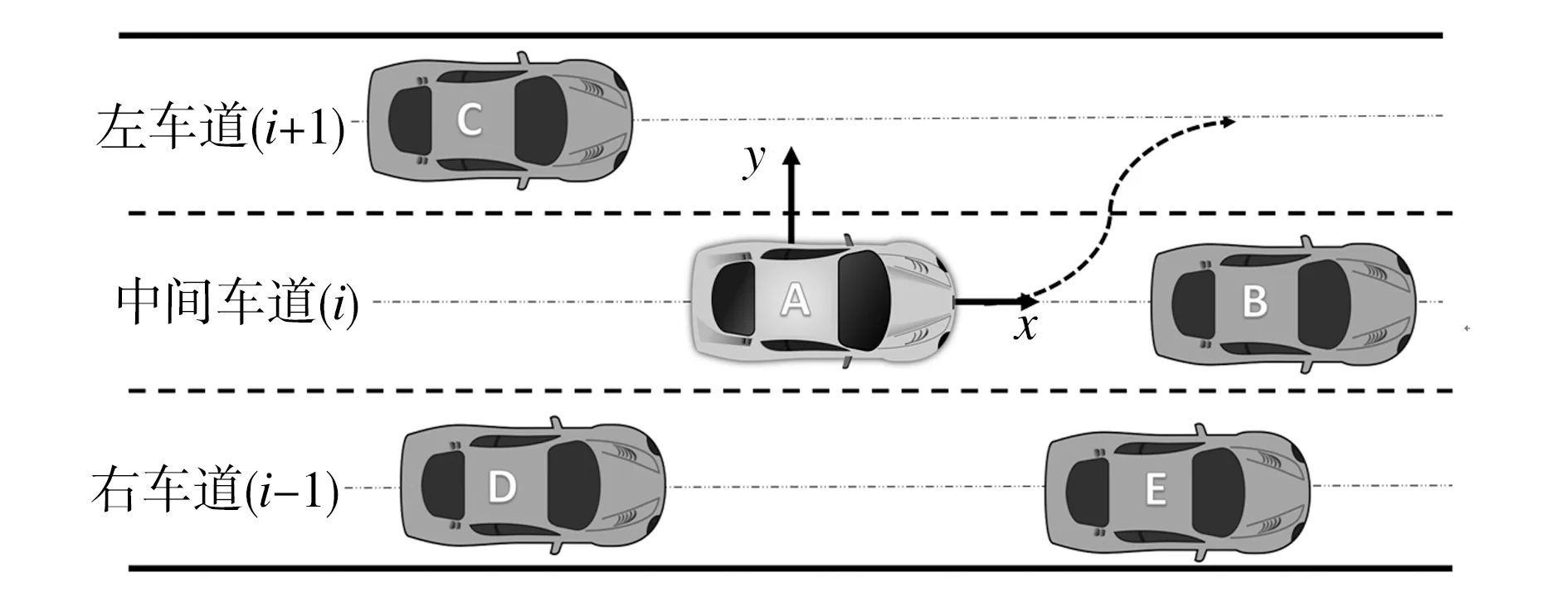
圖1 智能車換道超車場景示意圖
依據(jù)圖1所示場景形成的勢(shì)場如圖2所示,可以看出,障礙車輛風(fēng)險(xiǎn)場在縱向上影響范圍較大,而在橫向上影響范圍較小;其次,隨著主車與障礙車相對(duì)距離的減小,主車所受到的風(fēng)險(xiǎn)也越大。由此可知,使用二次高斯函數(shù)建立障礙車輛勢(shì)場滿足換道場景的要求。

(a)障礙車輛勢(shì)場3D圖
1.2 引導(dǎo)風(fēng)險(xiǎn)場
為了避免兩車發(fā)生碰撞事故,增加一個(gè)額外的引導(dǎo)勢(shì)場,更好地引導(dǎo)在慢速行駛的障礙車后方的車輛提前換道行駛。選用的引導(dǎo)勢(shì)場函數(shù)表達(dá)式為
Uext=Aobst+Fx(x-xobst)-Fy(y-yobst)2,
?x∈[-S,0]
(4)
式中:S為引導(dǎo)勢(shì)場在縱向上的影響范圍;Fx、Fy分別為引導(dǎo)勢(shì)場在縱向和橫向上的影響系數(shù),計(jì)算方式如下:
(5)
(6)
引導(dǎo)勢(shì)場只有在車輛靠近障礙車輛的時(shí)候才會(huì)產(chǎn)生實(shí)際意義,故引導(dǎo)勢(shì)場的強(qiáng)度必然不小于零,小于零的勢(shì)場值用零代替。影響范圍公式為:
S=0.5Lobst+Smin+tavrel
(7)
式中:Smin為引導(dǎo)勢(shì)場產(chǎn)生影響的最短距離;vrel為兩車之間的相對(duì)速度;ta為相對(duì)速度減小時(shí)的接近時(shí)距。
圖1所示換道場景的引導(dǎo)勢(shì)場見圖3,可以看出,引導(dǎo)勢(shì)場影響范圍隨著兩車相對(duì)速度絕對(duì)值的增加而擴(kuò)大,且距離障礙車輛質(zhì)心越近,引導(dǎo)勢(shì)場值越大。

(a)引導(dǎo)勢(shì)場3D圖
1.3 總的道路風(fēng)險(xiǎn)場
綜上所述,車輛總的道路風(fēng)險(xiǎn)場為障礙車輛勢(shì)場與引導(dǎo)勢(shì)場的整合:
Utotal=Uobst+Uext
(8)
2 基于道路風(fēng)險(xiǎn)場的換道決策模型
2.1 基于風(fēng)險(xiǎn)場的換道意圖
智能車的換道動(dòng)機(jī)是為了追求更高的通行效率以及更優(yōu)的行駛狀態(tài),即智能車換至目標(biāo)車道可獲得足夠的行駛空間以加速到期望車速。首先,比較主車當(dāng)前所處位置與相鄰車道中心線位置的風(fēng)險(xiǎn)場,若是相鄰車道中心線位置的風(fēng)險(xiǎn)場強(qiáng)度低于主車所處位置的場強(qiáng),則認(rèn)為主車有向相鄰車道的換道動(dòng)機(jī),相反則認(rèn)為本車保持當(dāng)前車道行駛更佳。但是,在實(shí)際情況下,若兩處的風(fēng)險(xiǎn)場場強(qiáng)的差值很小,一旦車輛狀態(tài)發(fā)生微小變化,就會(huì)引起場強(qiáng)變化,導(dǎo)致車輛頻繁產(chǎn)生換道意圖,反而影響通行效率。因此,本文定義一個(gè)規(guī)劃閾值P,只有當(dāng)主車所處位置與相鄰車道中心線位置的場強(qiáng)差值超過預(yù)設(shè)的規(guī)劃閾值,才認(rèn)為換道后可獲取更優(yōu)行駛狀態(tài),即滿足式(9)時(shí),車輛產(chǎn)生向相鄰車道的換道超車意圖。
Utotal(x,yi)>Utotal(x,yj)+P
(9)
式中:x為主車所處位置縱向坐標(biāo),yi為主車所處位置橫向坐標(biāo),yj為相鄰車道中心線橫向坐標(biāo)。
2.2 換道安全性分析
換道意圖產(chǎn)生后,為了保證換道安全性,本文以最小縱向安全距離作為判據(jù),其中包括本車道內(nèi)最小縱向安全距離以及目標(biāo)車道前、后車最小縱向安全距離。由文獻(xiàn)[9]統(tǒng)計(jì)分析可知,車輛切入場景的縱向速度變化很小,因此本文假設(shè)換道過程中主車與周圍車輛都保持恒定的縱向速度行駛。
(1)本車道最小縱向安全距離
在換道過程中,智能車可通過傳感器設(shè)備獲得與主車相同車道的前車的速度以及二者之間的縱向車距,保持合理的車距進(jìn)行換道。與前車的最小縱向安全距離MSS1計(jì)算如下:
(10)
式中:v為主車當(dāng)前車速,vf為前車速度,tC為換道臨界時(shí)間,dmin為最小安全距離的臨界值。
(2)目標(biāo)車道前、后車最小縱向安全距離
在更為復(fù)雜的交通環(huán)境中,車輛換道至有正常行駛車輛的目標(biāo)車道,因此要保證換道車輛與目標(biāo)車道上車輛之間的安全性。換道起始時(shí)刻,智能車獲取目標(biāo)車道車輛的位置與速度信息,進(jìn)行分析計(jì)算,保證換道結(jié)束時(shí)滿足安全車距的要求。換道車輛與目標(biāo)車道前、后車之間的最小縱向安全距離MSS2、MSS3分別為:
(11)
(12)
式中:vi,f、vi,r分別代表目標(biāo)車道前、后車的縱向速度。
2.3 自主換道觸發(fā)流程
在車輛產(chǎn)生換道意圖并判斷換道安全后,決策系統(tǒng)發(fā)出觸發(fā)換道指令,換道行為觸發(fā)流程如圖4所示。

圖4 換道行為觸發(fā)流程
3 軌跡跟蹤控制器
3.1 軌跡跟蹤誤差力學(xué)模型
本文利用LQR控制器對(duì)智能車規(guī)劃好的軌跡進(jìn)行跟蹤。首先建立一個(gè)適用于控制器設(shè)計(jì)的二自由度動(dòng)力學(xué)跟蹤誤差模型[10],如圖5所示。

圖5 二自由度動(dòng)力學(xué)跟蹤誤差模型
圖5中:δ為前輪轉(zhuǎn)角;lf、lr分別為車輛質(zhì)心到前、后軸的距離;ed為車輛質(zhì)心到參考軌跡的最短距離,即位置偏差;φ為車輛航向角,φdes為參考航向角;ω為橫擺角速度;vx、vy分別為車輛縱、橫向速度。
根據(jù)動(dòng)力學(xué)模型得到二自由度微分方程為:
(13)
式中:m為車輛質(zhì)量,Iz為轉(zhuǎn)動(dòng)慣量,Cf、Cr分別為車輛前、后輪側(cè)偏剛度。
定義航向誤差為
eφ=φ-φdes
(14)
設(shè)參考軌跡的半徑為Rdes,可得到理想的橫向加速度為
(15)
智能車產(chǎn)生的橫向加速度為
(16)
(17)
(18)
綜上所述,得出如下公式:
(19)
(20)
將式(19)和式(20)轉(zhuǎn)換為狀態(tài)空間表達(dá)形式,則為
(21)

3.2 預(yù)瞄模型
軌跡跟蹤控制器是基于誤差模型計(jì)算出前輪轉(zhuǎn)角的輸入,存在一定的滯后性,故在本文方法中對(duì)車輛狀態(tài)進(jìn)行一定采樣時(shí)間ts的預(yù)瞄。設(shè)車輛在預(yù)瞄時(shí)間內(nèi)勻速直線行駛,預(yù)瞄后車輛的航向角為φpre、坐標(biāo)為(Xpre,Ypre),有
(22)
式中:(X0,Y0)為軌跡規(guī)劃點(diǎn)的坐標(biāo)。
3.3 LQR控制器
本文利用LQR[11-12]對(duì)智能車換道軌跡進(jìn)行跟蹤控制。首先明確線性系統(tǒng)的性能指標(biāo)函數(shù)J為
(23)
式中:Q和R為控制器的權(quán)重矩陣。
為了使性能指標(biāo)J達(dá)到最優(yōu),采用變分法進(jìn)行求解。計(jì)算得到反饋矩陣為
K=(R+BTPB)-1BTPA
(24)
其中P為如下Riccati方程的正定解:
P=Q+ATPA-ATPB(R+BTPB)-1BTPA
(25)
最終得到LQR控制器的最優(yōu)控制律為
U(t)=-KX(t)
(26)
式中:K=[k1,k2,k3,k4]為LQR控制器增益。
3.4 前饋控制器
將式(26)帶入式(21)可得
(27)
由此可見,系統(tǒng)存在穩(wěn)態(tài)誤差,即存在無法消除的位置偏差和航向偏差,為此設(shè)計(jì)前饋控制器消除該誤差。設(shè)前饋控制輸出的前輪轉(zhuǎn)角為δf,即控制量輸入U(xiǎn)(t)=-KX(t)+δf。
根據(jù)終值定理可得系統(tǒng)的穩(wěn)態(tài)誤差為
e=-(A-BK)-1(Bδf+B1C)
(28)
為保證橫向偏差穩(wěn)態(tài)值趨于零,設(shè)計(jì)前饋控制律為
(29)
式中:kref為道路參考曲率。
將前饋控制律與LQR反饋控制律相結(jié)合,得到跟蹤算法的前輪轉(zhuǎn)角輸出量。
3.5 遺傳算法優(yōu)化權(quán)重矩陣參數(shù)
式(23)中的權(quán)重矩陣Q和R在車輛跟蹤控制中起著非常重要的作用。尋找最優(yōu)的Q和R是一項(xiàng)復(fù)雜的工作,往往需要大量試錯(cuò)才能得出可行解。本文利用遺傳算法來優(yōu)化LQR控制器參數(shù)[12-13]。
鑒于二自由度動(dòng)力學(xué)誤差模型有且僅有前輪轉(zhuǎn)角一個(gè)控制量,因此確定控制權(quán)重矩陣R=1。Q中的對(duì)角線參數(shù)代表了各項(xiàng)誤差的權(quán)值,在車輛軌跡跟蹤過程中更加關(guān)注位置誤差和航向誤差,因此將Q矩陣設(shè)置為
(30)
下面利用遺傳算法對(duì)矩陣Q中參數(shù)a、b進(jìn)行優(yōu)化。為了提高跟蹤的精準(zhǔn)性,同時(shí)考慮位置誤差和航向誤差,因此設(shè)目標(biāo)適應(yīng)度函數(shù)為
(31)
根據(jù)目標(biāo)適應(yīng)度函數(shù)最小化原則,LQR控制器參數(shù)優(yōu)化流程如圖6所示。具體步驟如下:

圖6 采用遺傳算法優(yōu)化LQR 控制器的流程
步驟1在0~10的約束范圍內(nèi)產(chǎn)生N個(gè)初始個(gè)體。
步驟2將初始種群中的個(gè)體賦值給權(quán)重矩陣Q中的a、b,得到反饋增益矩陣K,求出最優(yōu)控制律,并輸入給車輛仿真模型,運(yùn)行模型,計(jì)算適應(yīng)度函數(shù)值。
步驟3選取適應(yīng)度數(shù)值小的個(gè)體進(jìn)行迭代。
步驟4通過保優(yōu)、交叉、變異等遺傳操作,保留父代和產(chǎn)生的子代,組成新的種群。
步驟5重復(fù)步驟2~4,直至滿足終止條件。
4 仿真分析
為了驗(yàn)證本文方法的有效性,利用Simulink和Carsim搭建聯(lián)合仿真平臺(tái),針對(duì)車輛在快速路上自主換道行為進(jìn)行仿真測(cè)試,車輛的部分結(jié)構(gòu)參數(shù)如表2所示。

表2 車輛結(jié)構(gòu)參數(shù)
4.1 軌跡跟蹤控制器性能分析
在帶有前饋的LQR控制器基礎(chǔ)之上,分別采用經(jīng)驗(yàn)法和遺傳算法確定控制器參數(shù),在相同的車速和路況條件下進(jìn)行雙移線仿真測(cè)試,驗(yàn)證軌跡跟蹤控制效果。
在雙移線測(cè)試中,路面附著系數(shù)設(shè)為0.85,車速恒定為60 km/h,雙移線的軌跡方程[7]為
(32)

方案一 按照經(jīng)驗(yàn)法選取控制效果最好的一組控制參數(shù):a=5,b=5。
方案二 采用遺傳算法對(duì)控制器參數(shù)優(yōu)化,遺傳算法的終止代數(shù)設(shè)為20,初始種群個(gè)體數(shù)量為100,交叉和變異的概率分別取為0.75和0.15。多次運(yùn)行程序,雖然每次結(jié)果不同,但是非常接近,最后得出a=9.9608,b=0.1233。
兩個(gè)方案的測(cè)試結(jié)果如圖7所示。采用經(jīng)驗(yàn)法確定參數(shù)的LQR控制器可以將軌跡跟蹤的位置誤差控制在0.9 m以內(nèi),航向誤差控制在0.12 rad以內(nèi);利用遺傳算法優(yōu)化后的LQR控制器可以將位置誤差控制在0.6 m以內(nèi),航向誤差控制在0.1 rad以內(nèi)。可以看出,通過遺傳算法優(yōu)化LQR控制器矩陣參數(shù)能減少軌跡跟蹤系統(tǒng)的超調(diào)量,提升跟蹤精度。

(a)側(cè)向位置和位置誤差
4.2 換道超車仿真與結(jié)果分析
本文主要利用兩類場景、四種工況來驗(yàn)證換道決策方法的有效性和跟蹤的準(zhǔn)確性。第一類為簡單的換道場景,僅本車道前面存在低速障礙車輛;第二類為復(fù)雜的換道場景,存在多車道車輛影響。
(1)第一類場景
此類場景設(shè)計(jì)了兩種工況,通過設(shè)定不同的主車速度來驗(yàn)證換道超車觸發(fā)時(shí)刻的合理性。
工況一仿真場景如圖8所示,主車A行駛在快速路中間車道上,其前方有車輛B,而相鄰車道無任何車輛,該工況下各車輛的狀態(tài)參數(shù)如表3所示。

表3 工況一的仿真參數(shù)設(shè)定

圖8 工況一場景
車輛換道超車過程如圖9所示。結(jié)合表3以及圖8~圖9可知,本車道上車輛B的行駛速度低于主車A,且主車A的期望速度高于其當(dāng)前速度,為了追求更好的通行效率,主車A不斷靠近前車B,當(dāng)主車所處位置的勢(shì)場值與相鄰道路中心勢(shì)場值之差大于閾值時(shí),在t1時(shí)刻主車A產(chǎn)生換道意圖,由于左側(cè)車道沒有障礙車,選擇該車道為目標(biāo)車道。下一步進(jìn)行安全性分析,左側(cè)沒有障礙車且主車A與前車B的相對(duì)距離為41 m,大于本車道最小縱向安全距離MSS1=17 m的要求,故滿足換道的安全性要求。然后規(guī)劃出換道軌跡,t1時(shí)刻開始觸發(fā)換道指令,進(jìn)行超車,t2時(shí)刻主車A駛?cè)肽繕?biāo)車道,換道結(jié)束。

圖9 工況一的換道過程
圖10所示為工況一的仿真結(jié)果,包括換道過程中車輛實(shí)際軌跡與規(guī)劃出的目標(biāo)軌跡的對(duì)比、軌跡跟蹤誤差以及主車A的側(cè)向加速度和橫擺角。從圖10可以看出,整個(gè)換道過程相對(duì)平穩(wěn),軌跡跟蹤誤差小于0.3 m,側(cè)向加速度和橫擺角的峰值均在約束范圍之內(nèi)。

(a)側(cè)向位置和位置誤差
工況二仿真場景與圖8相同。相較于工況一,主車A的速度有所提升,車輛的具體位置與速度如表4所示。

表4 工況二的仿真參數(shù)設(shè)定
工況二的車輛換道超車過程如圖11所示。與工況一相比,主車A的速度有所提升,即主車與障礙車的速度差增加了,導(dǎo)致引導(dǎo)勢(shì)場的增強(qiáng),兩車產(chǎn)生追尾的可能性也提高了,因此換道觸發(fā)時(shí)刻有所提前。在t1時(shí)刻車輛A產(chǎn)生換道意圖,且此時(shí)前、后車距離為53 m,滿足本車道最小縱向安全距離MSS1=26 m的要求。車輛A在t1時(shí)刻觸發(fā)換道指令進(jìn)行換道,于t2時(shí)刻完成換道。

圖11 工況二的換道過程
工況二的仿真結(jié)果如圖12所示。與工況一相比,在車輛A行駛速度增加后,只有側(cè)向加速度與跟蹤誤差的峰值有所增加,且增幅很小,同時(shí),換道過程中橫擺角的峰值幾乎沒有變化,這體現(xiàn)出本文提出的軌跡跟蹤控制方法具有良好的適應(yīng)性。

(a)側(cè)向位置和位置誤差
(2)第二類場景
下面通過兩種工況來驗(yàn)證本文換道決策方法在復(fù)雜道路場景中的適用性。
工況三仿真場景參照?qǐng)D1,主車A行駛在快速路中間車道上,其前方有車輛B,且左右相鄰車道上均有車輛。該工況下各車輛的狀態(tài)參數(shù)如表5所示。

表5 工況三的仿真參數(shù)設(shè)定
工況三的換道過程如圖13所示。車輛A和B的位置及速度參數(shù)與工況二一致,依據(jù)工況二測(cè)試結(jié)果可知,A車在與前車B的距離為53 m處產(chǎn)生換道意圖,且C車所在車道速度更快,故被定為目標(biāo)車道。此刻A車與C車相距36 m,滿足與目標(biāo)車道后車之間的最小縱向安全距離MSS3=17 mm的要求,t1時(shí)刻觸發(fā)換道指令,t2時(shí)刻A車駛?cè)肽繕?biāo)車道完成換道。

圖13 工況三的換道過程
工況四仿真場景與工況三相同,只是車輛C的速度由100 km/h提升到120 km/h,各車輛的狀態(tài)參數(shù)見表6。

表6 工況四的仿真參數(shù)設(shè)定
圖14所示為工況四的換道超車過程。相較于工況三,車輛C速度提升后,主車A受環(huán)境中其他車輛的位置和行駛速度的影響,換道觸發(fā)時(shí)刻有明顯的延后,這是車輛綜合考慮換道意圖和換道安全性的結(jié)果。首先主車A在中間車道行駛,不斷靠近障礙車輛B,由工況三可知,A車在距B車53 m時(shí)產(chǎn)生換道意圖,此時(shí)A車與C車的縱向距離為21 m,低于最小安全換道距離MSS3=33 mm的要求,因此等待C車超越A車后,并且兩車的相對(duì)距離大于前車最小縱向安全距離MSS2=8 mm的條件時(shí),A車開始換道。由工況四的仿真結(jié)果可知,本文換道超車控制方法充分考慮了復(fù)雜道路環(huán)境下的換道安全性。

圖14 工況四的換道過程
5 結(jié)語
為了保障智能車自主換道超車的安全性,本文首先根據(jù)人工勢(shì)場理論量化車輛換道風(fēng)險(xiǎn),建立了基于道路風(fēng)險(xiǎn)場的換道觸發(fā)決策模型,然后采用改進(jìn)的LQR控制器對(duì)軌跡進(jìn)行跟蹤,其中LQR控制參數(shù)通過遺傳算法進(jìn)行優(yōu)化。本文最后通過Simulink和Carsim聯(lián)合仿真驗(yàn)證了改進(jìn)后控制器的精度提升,并且通過不同道路環(huán)境下的換道超車仿真試驗(yàn),證明了所提出的換道觸發(fā)決策模型的有效性和安全性。然而,本研究未考慮換道過程中車輛縱向速度的改變,且目前還都只是基于聯(lián)合仿真測(cè)試,下一步工作將針對(duì)本文方法進(jìn)行實(shí)車驗(yàn)證。
