基于信號強度的地鐵CBTC系統干擾源定位
2023-06-17 05:53:08魏詩燕鄒勁柏
應用技術學報 2023年2期
魏詩燕,沙 泉,鄒勁柏
(上海應用技術大學 軌道交通學院, 上海 201418)
隨著國內列車運行控制技術的不斷發展,基于通信的列車運行控制(communication based train control,CBTC)系統已經廣泛應用于城市軌道交通中。國外的地鐵CBTC系統運營體制不同于國內,列車內的信號多被屏蔽,地鐵乘客量較小,因此列車出現受到信號干擾而逼停的情形很少。而且一些國家的CBTC系統為了預防乘客信息系統對其可能造成的影響,主要對列車內部的乘客信息系統引起的信號干擾進行屏蔽或優化,所以關于CBTC系統受到無線信號干擾方面的研究相對較少。而我國地鐵允許列車內部乘客使用手機無線上網,中國移動、聯通、電信等運營商為滿足乘客不斷增大的上網需求,均在城市軌道交通沿線部署了3G、4G等信號,使CBTC系統不可避免地受到了眾多無線網絡的干擾,降低了CBTC系統運行的安全性和穩定性[1-2]。為了提高地鐵運行安全性和穩定性,對地鐵CBTC系統抗干擾技術的研究已經成為迫切的需求。
國內外有一些學者研究了CBTC系統抗干擾的相關問題。文獻[3]提到了CBTC系統內的無線干擾情況,該情況指1個地面無線接入點(access point,AP)對應了多輛列車同時與其通信。為解決地鐵上多個用戶嘗試通過同頻信道接入AP而產生的同頻干擾問題,文獻[4]通過引入載波偵聽多址/沖突避免(the carrier sense multiple access/collision avoidance random access, CSMA/CA)的隨機接入協議。目前國內外基于地鐵干擾方面的研究大多在干擾類型的分類,以及對干擾環境進行測試,用不同的方法改進系統的信道選擇和接入程序。然而,對于CBTC干擾源識別和定位方面的研究卻很少。
為了準確地定位干擾源,首先要選擇合適的定位算法。何平川等[5]提出了一種基于到達時間幾何時差(time difference of arrival ,TDOA)的時差定位分析方法。王棋萍等[6]根據干擾信號的衰減效應,提出了一種分布式的基于干擾信號強度(received signal strength indicator, RSSI)估計的干擾源定位算法。與普通手機通信不同,列車是沿規定的軌道線路運行,其通信制式通信是線狀網絡。梯度下降和Taylor算法均可解決由于直線軌跡引起的非線性問題,文獻[7]將這2種算法聯合,梯度下降-Taylor展開多點聯合定位優化算法的優點是可用更少的時間通過少數幾步迭代就能收斂到目標。
本文首先提出了一種基于RSSI算法的地鐵CBTC干擾源定位方案。該方案在優化算法方面,選用了擁有簡單、易理解、參數較少等特點的粒子群算法[8-10],使得定位的干擾源位置信息更精準。
1 研究模型
1.1 干擾源定位模型
本文的地鐵研究環境設計為無其他障礙物,且假定干擾源在鐵路沿線兩側的地鐵線路。城市地鐵呈線狀分布,分為直線、圓曲線以及連接它們的三次拋物線緩和曲線。為了方便研究,本文主要選定直線軌道線路進行干擾源的定位研究[11]。如圖1所示,(X1,Y1)是需要確定的目標干擾源位置。列車在運行過程中,因為在不同位置(xi,yi)距離干擾源距離不同,列車可以接收到來自同一干擾源不同強度的信號。
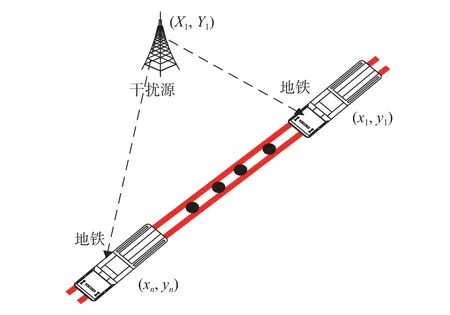
圖1 干擾源定位模型Fig. 1 Interference source location model
所以通過收集列車在不同位置接收到來自干擾源不同的信號強度Si,可以計算出列車在某位置和干擾源的距離di,但是di并不能確定目標干擾源的位置坐標。為得到目標干擾源的位置,先假定一個干擾源位置(X0,Y0)。通過兩點間的距離公式,可以得出列車在不同位置與假設干擾源(X0,Y0)的距離為:
式中,i=1,2,···,n表示列車運行過程中在不同位置接收到的第i個信號。再通過優化算法可對假定干擾源位置進行不斷的修改,直至逼近目標干擾源(X1,Y1)。
1.2 RSSI測距模型
在很多的理論與實踐中可以發現,信道的大尺度衰落特性是服從正態分布的[12-13]。即列車接收到的RSSI和列車與干擾源間的距離之間呈對數變化,當收發天線之間的距離為d時,信號的路徑損耗表達式為:
式中:N表示路徑損耗系數,由周圍環境決定;P(d0)為參考距離d0的路徑損耗值;Xσ是高斯隨機變量,其平均值是0,其標準差是σ。
由此可以得到列車接收到干擾源的信號強度Si的表達式:
式中,參數A和N按照文獻[7]給出的數值,其中A=-21.0742;N=2.451 8。此RSSI數據來源于不同速度的列車沿200 m直線軌跡運行時采集模擬干擾源的WIFI信號。
2 粒子群優化算法
2.1 初始位置和目標函數
通過設定干擾源初始位置(X0,Y0),再根據列車在不同測試點的位置(xi,yi),利用式(1)可得到測試點與設定的初始位置的距離為。
2.2 算法介紹
使用粒子群優化算法對初始位置(X0,Y0)進行修正,使得f取得極小值,得到目標干擾源位置。粒子群優化(particle swam optimization, PSO)是一種迭代隨機搜索算法,算法是通過粒子間的相互作用而發現復雜搜索空間中的最優區域。在搜索空間中,每一個解都是1個單獨的沒有體積和質量的粒子,所有的粒子還具有1個速度參數來決定他們飛翔的方向和距離。然后粒子群會追隨當前的最優粒子在解空間中搜索。在每次迭代中,粒子會根據2個極值信息來自我更新:①單個粒子自身經歷過的最優解(position best,pb);②所有粒子經歷過的最優解(global best,gb)。用這種方法,粒子群可以逐漸逼近那個最合適的解,從而找到最終的最優解[14]。但是,粒子群算法容易陷入局部最優,從而導致最終結果不是最適合的解。為此,本文基于基礎的粒子群算法進行了一些改進,使得最終結果跳出局部最優,得到全局最優解。
2.2.1 速度變異粒子群算法
為了避免搜索過程中陷入局部最優,可采用速度變異的改進粒子群算法[15-16]。基礎的PSO算法描述如下:假設在1個D維目標搜索空間中,N個粒子組成1個粒子群,第j個粒子的位置和速度可分別表示為xj=(xj1,xj2,···,xjD)和vj=(vj1,vj2,···,vjD)。并且vj是根據自己以往最優的解pb和整個種群中最優的解gb進行動態調整。速度更新是通過粒子的當前速度和位置的線性組合來計算的。單獨粒子的局部最優解的位置是pj=(pj1,pj2,···,pjD);整個粒子群的全局最優解的位置是pg=(pg1,pg2,···,pgD)。每個粒子根據以下公式迭代更新速度和位置:
式中:j=1,2,···,n;d=1,2,···,D;c1和c2是學習因子,是為了增加粒子的多樣性而加的擾動,c1為粒子個體的加速權重系數,c2為粒子群體的加速權重系數,粒子的最大速度限定為Vmax;r1和r2是隨機數,服從(0,1)之間的均勻分布;是粒子j的當前速度;是粒子j的更新速度;是粒子j的當前位置;是粒子j的更新位置。式(5)決定了粒子的運動速度,由式(5)可見,第j個粒子的第(t+1)次迭代的運動速度由3個部分組成:第1部分代表了粒子自身的運動慣性,它的值是由前一次迭代的粒子運動速度所決定的;第2部分代表了粒子群個體對自身經歷的認知,其作用在于吸引粒子向著自身經歷過的最優方向運動;第3部分代表了粒子群對群體經歷的認知,其作用在于使粒子群向全局最優方向運動。在更新過程中,粒子每一維的速度限制在[-Vmax,Vmax]內,粒子每一維的位置也被限制在允許范圍之內。同時,個體極值和全局極值在迭代過程中不斷更新,最后輸出的全局極值就是算法尋優到的最優解。
為了避免粒子j在 搜索的后期因為運動速度為0而陷入局部最優,選取粒子j在每一維運動速度中的最小值,按照一定的概率進行變異,使原本聚集的粒子群分散開,脫離局部最優位置。令
為每一維的速度最小值,并把對應的粒子速度按照一定的概率重新設置初值。
則各粒子以速度vj根據式(6)運動到新的位置點。
2.2.2 結合自適應慣性權重的混合粒子群算法
ω是慣性加權系數,用來控制歷史速度對當前速度的影響程度,一般在[0.1, 0.9]之間取值。為了避免粒子群算法陷入局部最優值情況的發生,對ω采取了一些改進方法,即使用自適應慣性權重并引入模擬退火算法的粒子群算法。改進后的粒子群算法將采用常見型ω轉化為非線性慣性權重函數[17]:
式中:ωstart為初始慣性權重;ωend為終止慣性權重;t為當前迭代次數;tmax為算法總迭代次數;k為控制因子(一般取0.6)。一般情況下取ωstart為0.9,ωend為0.4。整個搜索過程是一個循環迭代過程,終止條件設為最大循環代數[18]。
由式(5)~(9)可見,粒子群優化(PSO)具有參數少的優點,粒子群算法只有c1、c2、ω等一些參數,使得操作簡單,進而上手容易,易于實現優化的目的。最終達到函數優化的目的,而改進后的粒子群算法可使得式(4)中的f在短時間內取得全局最優解,即f的極小值。粒子群算法因為效率高、具備尋優原理簡單、可調整參數少、并行搜索和全局收斂等諸多優點,已被應用到許多領域。
2.3 干擾源定位整體算法流程
(1)在使用粒子群算法前,先設置列車8種速度下所測點的個數。
(2) 初始化粒子群,隨機生成一組粒子的位置和速度,初始化個體最優值(pb)和全局最優值(gb)。
(3) 計算每個粒子的目標函數值,作為粒子的適應度值。
(4) 將每個粒子的適應度值與其個體最優值(pb)進行比較,比較方法使用上述模擬退火法中Metropolis準則,如果當前粒子適應度值更好,則將其作為新的pb。
(5) 將更新粒子的pb與種群當前最優值(gb)進行比較,比較方法使用上述模擬退火法中Metropolis準則。如果優于當前gb值,則將其值作為當前組新的gb。
(6) 根據式(5)和式(6)更新粒子的速度和位置。
(7) 判斷是否滿足終止條件。如果滿足,則停止算法并輸出gb;如果不滿足,請返回步驟3。
(8) 最后輸出迭代次數與適應度的關系圖以及利用粒子群算法得到的干擾源位置坐標和與實際干擾源位置的誤差。
圖2所示為PSO算法的流程圖。
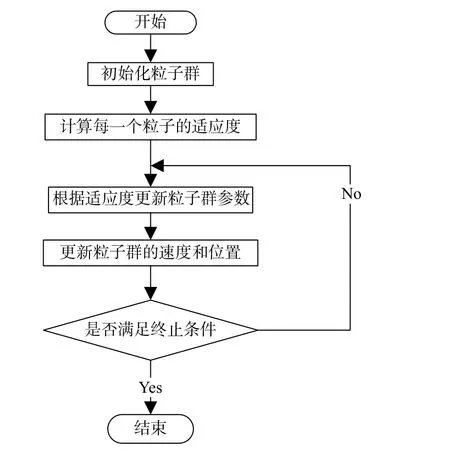
圖2 PSO算法流程圖Fig. 2 PSO algorithm flow chart
3 場景仿真
在實驗環境下,列車在1條200 m長的直線線路上勻速行駛,根據設置好的8種速度進行仿真實驗,假設干擾源位置(X0,Y0),通過式(3)并加入一些隨機噪聲的方法可得到各點的Si。利用MATLAB軟件進行干擾源定位的仿真。已知RSSI公式中的A=-21.074 2。以下是場景仿真的優化流程:
(1) 初始化線路參數和列車運行參數;設置粒子群算法參數,設置群體個數N=80,群體維數D=2,最大迭代次數=100,慣性權重ω=0.8;設置實際干擾源位置為(103,15)。
(2) 設置2、4、5、8、10、20、25、40 m/s共8種速度,按照0.1 s采樣周期計算位置(xi,yi)處的Si,加入隨機噪聲作為定位算法的仿真數據。
(3) 分別采用基本的粒子群優化算法和改進后的粒子群算法,根據仿真數據進行干擾源定位搜索,其全局最優解即為求得的干擾源定位。
(4) 圖3是8種不同速度下,使用基本粒子群算法的迭代次數與適應度的關系圖。
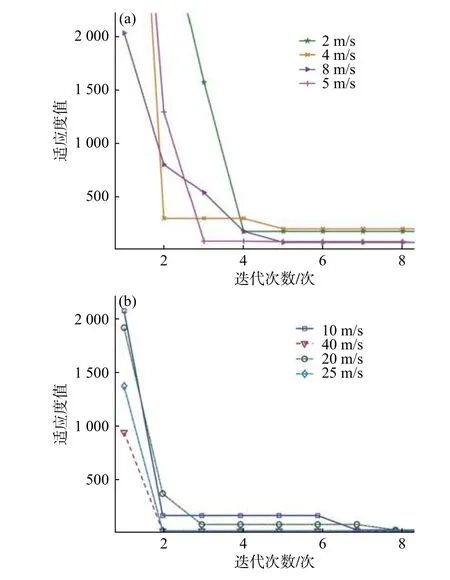
圖3 使用基本粒子群算法的迭代次數與適應度的關系Fig. 3 The relationship between the number of iterations and fitness using the basic particle swarm algorithm
(5) 將不同列車運行速度下的定位結果進行比較,各取50組數據并求平均值,得到仿真結果如表1所示。
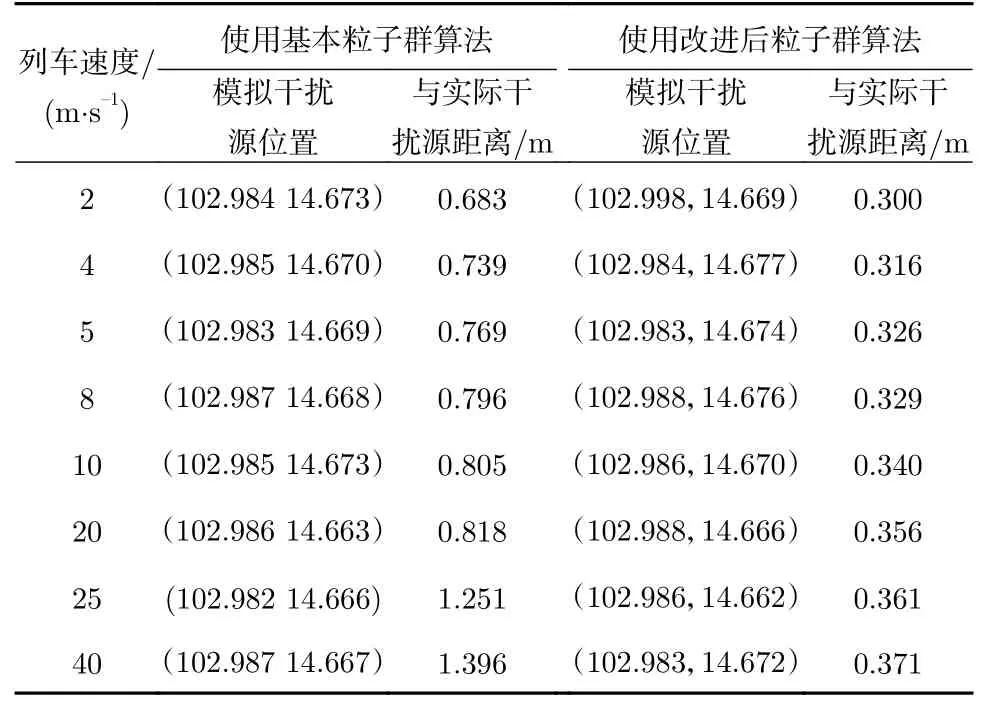
表1 仿真干擾源位置表Tab. 1 Simulated interference source location table
(6) 圖4是列車在速度為4 m/s的情況下,使用不同粒子群算法的迭代次數與適應度的關系圖。
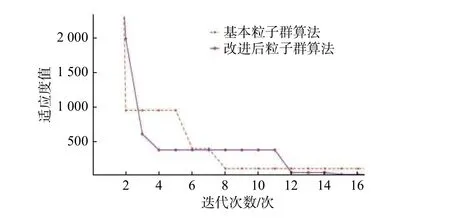
圖4 速度為4 m/s 的情況下,使用不同粒子群算法的迭代次數與適應度的關系圖Fig. 4 At a speed of 4 m/s , the relationship between the number of iterations and fitness of different particle swarm algorithms
如圖3所示,當速度越小時,迭代次數為0時,粒子的適應度越大,換句話,粒子群迭代次數也會更小;由圖3可知,在相同迭代2次后,列車速度越小,適應度函數的值下降的幅度越大;同樣,列車速度越大,適應度值變成0所需要的迭代次數越多。
由表1不同速度下得到的模擬干擾源位置可見,當列車速度越快,得到的模擬干擾源位置與真實干擾源位置相差越大;由表1可知,使用基本粒子群算法和使用改進后粒子群算法得到的結果有較大的差異,使用改進后的粒子群算法,使得模擬干擾源的位置更靠近真實干擾位置,與實際干擾源距離更近。
從有關文獻中可知,基本的PSO算法在搜索的初期收斂速度很快。從圖4的對比可知,改進后的算法初期收斂速度較基本算法慢,且最后收斂的適應度值更小。
綜上所述,實驗結果與模擬列車運行的速度有關,由此可知,列車速度越低,收到的RSSI信息越有效,定位精度也越高;改進后的粒子群算法優于基本粒子群算法,在一定程度上,可使粒子避免進入局部最優,最終得到較好的結果。
4 結語
利用MATLAB仿真工具模擬了列車運行的實際場景,通過信號強度RSSI的數據進行對干擾源的測距,再利用改進后的粒子群算法不停迭代找出最優解,即模擬干擾源位置,使得模擬干擾源不斷逼近真實干擾源,最終得到最優解。實驗結果表明干擾源定位的精度與模擬列車運行的速度有關,通過分析得出列車速度越低,收到的RSSI信息越有效,定位精度也越高的結論。將基本粒子群算法和使用改進后粒子群算法的結果進行對比,發現改進后的粒子群算法對干擾源的定位效果更好,更適用于本實驗。對于軌道交通干擾源識別與定位的研究,僅僅從信號強度角度出發來確定干擾源位置,研究方法有一定的局限性。未來,對于地鐵內無線干擾源的定位研究,可以通過建立豐富的環境指紋庫來開展研究,同時針對不同的列車運行速度采用不同的采樣率,在定位方法上再輔以無線電傳播時間差等多種技術手段,以增強精準度。