機器人輔助腹腔鏡與傳統腹腔鏡下腎盂成形術在治療兒童腎盂輸尿管連接部梗阻中的對比分析
2023-06-22 22:31:59劉慧,范曉曉,李德儒,王東明,李愛武
機器人外科學 2023年5期
劉慧,范曉曉,李德儒,王東明,李愛武
摘要 目的:對比分析機器人輔助腹腔鏡和傳統腹腔鏡下腎盂成形術治療兒童腎盂輸尿管連接部梗阻(Ureteropelvic Junction Obstruction,UPJO)的臨床療效,總結機器人輔助腹腔鏡腎盂成形術的臨床經驗及優勢。方法:回顧性分析2020年7月—2022年10月在山東大學齊魯醫院小兒外科接受機器人輔助腹腔鏡腎盂成形術(Robot-assisted Laparoscopic Pyeloplasty,RALP)(RALP組,n=22)及傳統腹腔鏡腎盂成形術(Laparoscopic Pyeloplasty,LP)(LP組,n=48)治療的患兒的臨床資料,并對兩組患兒的一般臨床資料、手術時間、腎盂輸尿管吻合時間、術中失血量、術后住院天數、住院總費用、術后短期并發癥、手術治療效果等指標進行對比,分析兩種手術方式的優劣。結果:兩組術后腎盂前后徑(Anteroposterior Diameter,APD)較術前均有明顯減小(P<0.001)。與LP組相比,RALP組的腎盂輸尿管吻合時間更短[(27.95±9.52)min Vs(41.17±8.34)min,P<0.001],住院總費用更高[5.05(4.78,5.26)萬元Vs 3.63(3.38,3.84)萬元,P<0.001],而兩組的手術時間、術中出血量、術后住院天數、術后并發癥發生率、手術前后APD差值比較,差異均無統計學意義。結論:機器人輔助腹腔鏡腎盂成形術是治療兒童UPJO安全、有效的手段。與傳統腹腔鏡腎盂成形術相比,機器人輔助腹腔鏡腎盂成形術具有術野清晰、縫合精準、術中腎盂輸尿管吻合時間短、學習曲線短、符合人體工程學等優勢,不足之處主要在于其住院費用較高,Trocar孔瘢痕稍大。
關鍵詞 腎盂輸尿管連接部梗阻;機器人輔助手術;腹腔鏡手術;腎盂成形術;兒童
中圖分類號 R692 文獻標識碼 A 文章編號 2096-7721(2023)05-0477-08
Comparative analysis of robot-assisted and conventional laparoscopic pyeloplasty in the treatment of ureteropelvic junction obstruction in children
LIU Hui, FAN Xiaoxiao, LI Deru, WANG Dongming, LI Aiwu
(Department of Pediatric Surgery, Qilu Hospital, Shandong University, Jinan 250012, China)
Abstract Objective: To compare and analyze the clinical efficacy of robot-assisted and conventional laparoscopic pyeloplasty in the treatment of ureteropelvic junction obstruction (UPJO) in children, and summarize the clinical experience and advantages of robot-assisted laparoscopic pyeloplasty. Methods: A retrospective analysis was performed on the clinical data of children treated with robot-assisted laparoscopic pyeloplasty (RALP group, n=22) and conventional laparoscopic pyeloplasty (LP group, n=48) in the Department of Pediatric Surgery of Qilu Hospital of Shandong University from July 2020 to October 2022. The general clinical data, operative time, ureteropelvic anastomosis time, intraoperative blood loss, postoperative hospital stay, total hospitalization costs, postoperative short-term complications, and surgical treatment effects of the two groups were compared to analyze advantages and disadvantages of the two surgical methods. Results: The postoperative APD (Anteroposterior Diameter) of the two groups was significantly lower than that before surgery (P<0.001). Compared with LP, the time of ureteropelvic anastomosis in children with RALP was shorter [(27.95±9.52)min Vs(41.17±8.34)min, P<0. 001] , and the total cost of hospitalization was higher [50.5(47.8, 52.6) thousand CNY Vs 36.3(33.8, 38.4) thousand CNY (P<0. 001) ], while there were no significant differences in operative time, blood loss, postoperative hospital stay, postoperative complication rate, and APD difference before and after surgery. Conclusion: Robot-assisted laparoscopic pyeloplasty is a safe and effective way to treat UPJO in children. Compared with the conventional laparoscopic pyeloplasty, it has clearer field of vision, more precise suturing, shorter ureteropelvic anastomosis time, shorter learning curve, and more ergonomic position. However, it faces the disadvantages of higher cost of hospitalization and slightly larger scar of the Trocar hole.
Key words UPJO; Robot-assisted surgery; Laparoscopic surgery; Pyeloplasty; Child
先天性腎盂輸尿管連接部梗阻(Ureteropelvic Junction Obstruction,UPJO)是兒童腎積水的常見原因,曾經治療該疾病的“金標準”一直被認為是開放Anderson-Hynes離斷性腎盂成形術(Open Pyeloplasty,OP)。1995年,兒童腹腔鏡腎盂成形術(Laparoscopic Pyeloplasty,LP)首次被Peters C A等人[1]描述,因其不亞于OP的成功率及低并發癥率、高美觀性、低創傷性等優勢,成為治療兒童UPJO的新的金標準[2]。
近年來,越來越多的文獻證明機器人輔助腹腔鏡腎盂成形術(Robot-assisted Laparoscopic Pyeloplasty,RALP)不僅成功率不低于LP,而且住院時間短,恢復時間快,學習曲線短,更符合人體工程學,推薦有實施條件的中心積極開展[3-6]。也有研究認為兩種術式的療效相當,但RALP費用較高、手術時間偏長,LP更適合推廣應用[7]。目前兩種手術方式的優劣仍有爭議。本研究以UPJO患兒作為研究對象,比較分析兩種手術方法的優缺點,并總結RALP的初步經驗。
1 資料與方法
1.1 臨床資料
本研究以2020年7月—2022年10月在山東大學齊魯醫院小兒外科接受治療的UPJO患兒作為研究對象。病例納入標準:①患側初次手術。②術前經泌尿系超聲、磁共振尿路成像(MRU)等明確診斷為UPJO。③至少符合下列一項手術指征:存在腎積水相關臨床癥狀(疼痛、泌尿系感染),初次評價患側腎功能< 40%且T? > 20 min,分腎功能> 40%者;行超聲隨訪腎積水加重或積水持續并伴有腎實質變薄,或復查腎核素顯像、分腎功能下降大于5%~10%[8];腎實質厚度<0.4 cm、腎盂前后徑(APD)>3.0 cm或APD>2.0 cm伴有腎盞擴張。排除標準:①二次手術。②解剖學合并孤立腎、重復腎或其他腎臟畸形加行相關手術。
本研究共納入70例患兒,其中RALP組22例,LP組48例。收集兩組病例的年齡、性別、體重、術前患側APD值等一般臨床資料,以及兩組病例的手術時間、術中腎盂輸尿管吻合時間、術中出血量、常規病理、術后住院時間、住院總費用、術后并發癥等數據,進行統計學分析。
本研究已通過山東大學齊魯醫院醫學倫理委員會批準,并由患兒監護人簽署知情同意書。
1.2 手術方法
兩組患兒手術均由同一主刀醫師完成,均采用靜脈復合全身麻醉。
1.2.1 RALP組手術方法
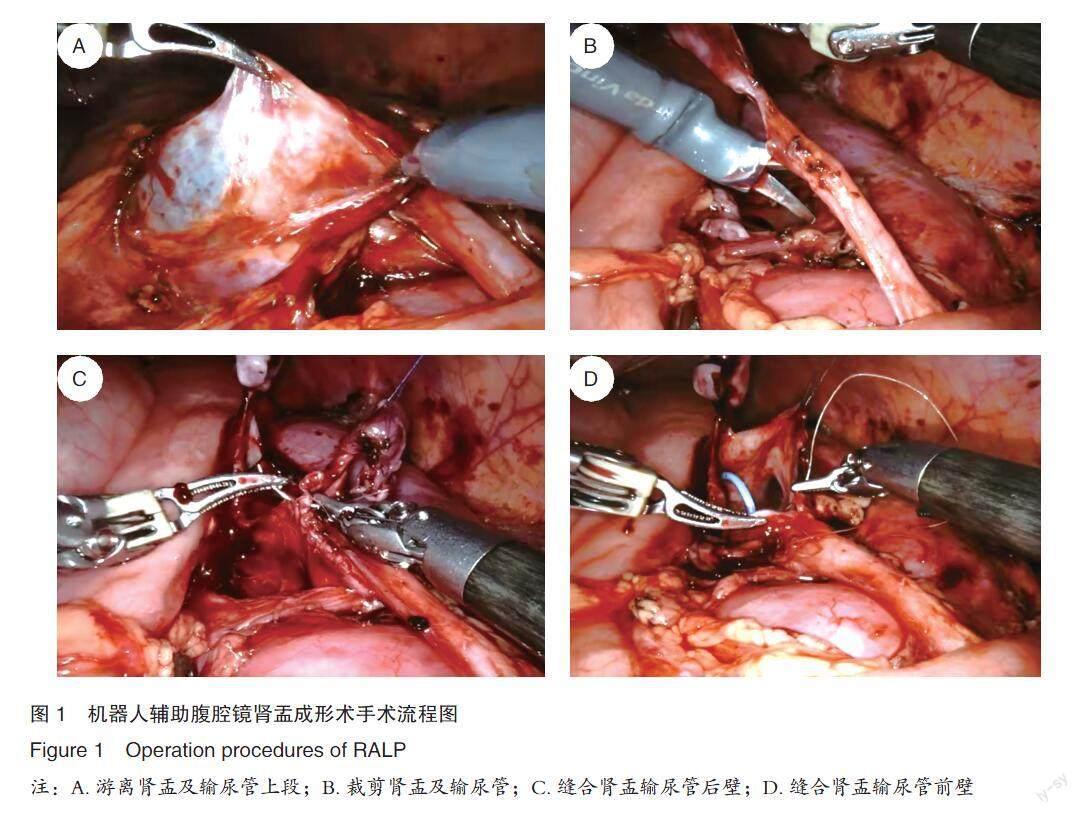
本研究采用達芬奇Xi機器人手術系統。患兒取健側臥位,置雙腔尿管,常規消毒、鋪巾。逐層切開臍環,直視下置入8 mm Trocar,氣腹壓力8 mmHg;置入腹腔鏡,在腹腔鏡監視下分別自腹中線臍孔Trocar上、下6 cm處置入另外兩個8 mm Trocar,另于健側下腹置入5 mm Trocar作為輔助孔,連接機器人機械臂,啟動達芬奇機器人系統。于降結腸外側打開側腹膜,顯露患側腎盂及輸尿管起始部。自腎盂最低點切開,修剪擴張的腎盂至距離腎實質1~2 cm處,保留最低位舌形瓣備用。自腎孟輸尿管連接部梗阻點遠端剪開輸尿管,向遠端縱行剖開輸尿管外側約1.5 cm。懸吊腎盂及輸尿管以方便顯露,5-0可吸收線間斷加連續吻合腎盂及輸尿管后壁,置入雙J管,重新懸吊腎盂,以雙J管為支架,吻合腎盂輸尿管前壁及腎盂前后壁。檢查吻合口通暢、無張力,留置腎周引流管1根,手術完畢,關閉達芬奇機器人手術系統(如圖1)。
1.2.2 LP組手術方法
麻醉成功后,患兒取仰臥位,患側腰部墊高,呈斜坡臥位。置雙腔尿管,常規消毒、鋪巾。逐層切開臍環入腹,直視下置入5 mm Trocar,氣腹壓力8 mmHg;置入腹腔鏡,在腹腔鏡監視下分別自患側腹直肌外緣距臍6 cm上、下腹各置入另外兩個5 mm Trocar。手術操作過程大致同RALP組。
1.3 術后處理、隨訪
術后3d左右拔除腹腔引流管,術后5d左右拔除導尿管。6~8周返院拔除雙J管。術后1、2、3、6月門診復查泌尿系超聲及尿常規。如病情穩定,以后每3~6月復查1次泌尿系超聲,必要時復查腎功能。由于腎核素顯像存在放射性,部分術后患兒家屬拒絕檢查,故本研究選取APD作為主要研究指標,對比分析手術前后患腎積水變化情況。
1.4 統計學方法
所有數據采用 SPSS 26.0統計軟件進行分析。正態分布計量資料采用均數±標準差(x±s)進行描述,組間比較采用獨立樣本t檢驗;對非正態分布計量資料采用M(Q1,Q3)進行描述,組比較采用Wilcoxon秩和檢驗;對于計數資料采用例進行描述,組間比較采用 χ2檢驗。對配對設計的計量資料采用相關樣本的t檢驗或秩和檢驗,以P<0.05為差異有統計學意義。
2 結果
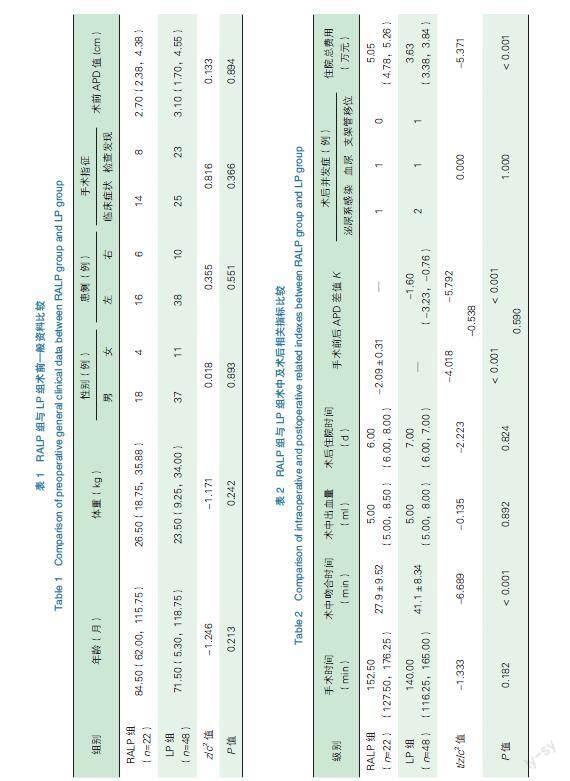
兩組患兒年齡、性別、體重、術前APD值等一般臨床資料比較,差異均無統計學意義(P>0.05),見表1。兩組患兒手術均順利完成,無中轉開腹。RALP組腎盂輸尿管吻合時間較LP組短(27.95±9.52)min Vs (41.17±8.34)min,差異具有統計學意義(t=-6.689,P<0.001);RALP組的住院費用為5.05(4.78,5.26)萬元,高于LP組的住院費用3.63(3.38,3.84)萬元,差異具有統計學意義(z=-5.371,P<0.001);隨訪至今,兩組患兒腎積水均較術前明顯改善,手術效果明顯,RALP組術后APD值1.00(0.68,1.70)cm,較術前2.70(2.38,4.38)cm明顯減小(配對t檢驗,t=6.786,P<0.001),LP組術后APD值較術前也明顯減小1.00(0.80,1.68)cm?Vs 3.10(1.70,4.55)cm(配對秩和檢驗,z=-5.792,P<0.001)。其余研究指標差異均無統計學意義(P>0.05),見表2。
其中,RALP組中有1例術后出現泌尿系感染,LP組有2例泌尿系感染,予以抗炎、抗感染等保守治療后均有效。RALP組及LP組中各有1例術后出現血尿,拔除輸尿管支架管后癥狀消失。LP組有1例出現支架管移位,輸尿管鏡下支架管復位成功。其余病例定期隨訪均未見明顯術后并發癥。兩組并發癥發生率比較,差異無統計學意義(P>0.05)。
3 討論
UPJO是兒童腎積水的常見原因,主要包括腎盂輸尿管連接部狹窄、瓣膜、息肉、高位輸尿管開口、先天性腎旋轉不良及異位血管或迷走血管壓迫等,其中腎盂輸尿管連接部狹窄最為多見。隨著胎兒超聲技術的發展,產前即可明確診斷。先天性UPJO 腎積水存在自行消退或改善的可能,完全緩解率為33%~70%[9]。但對于手術指征明確的患兒,需及時予以手術干預,以防腎功能出現進行性下降,造成不可逆的嚴重后果。
近年來,隨著時代與科技的進步,機器人輔助腹腔鏡手術已逐漸應用到小兒外科領域,其中RALP是目前小兒外科中最常見的機器人輔助手術[10]。機器人輔助手術(Robot-assisted surgery,RAS)當前被廣泛認可的主要優勢是操作靈活、動態縮放和震顫消除,這些優勢有助于提高手術精度,降低腹腔鏡的縫合難度。此外,其3D成像技術和可放大的操作視野有助于術者進行縫合操作,且坐位操作更符合人體工學設計[11]。同時,RALP的學習曲線較LP短,這是多項研究得出的一致結論。Kassite I 等人[12]最早提出至少需要41個案例才能掌握RAS技能。但隨著RALP的推廣,越來越多的研究指出,對于OP及LP手術經驗豐富的外科醫師而言,RALP的學習曲線將明顯縮短[13-16]。
本研究中心于2020年7月應用達芬Xi奇手術機器人系統成功開展了本院第1例RALP,目前已積累了一定的病例及手術經驗,現將經驗總結如下:①達芬奇Xi系統較達芬奇Si系統在驅動結構、內窺鏡、機械手、支架設計等方面均有大幅改進,更適用于小兒外科手術;②達芬奇Xi系統開機自帶的單極手術彎剪、持針鉗及抓持器足夠支持整臺RALP,無需增加其他器械,可有效控制手術費用,減輕患兒家庭的經濟壓力;③由于缺乏觸覺反饋,在吻合腎盂輸尿管時需注意打結力度,避免用力過度拉斷縫線或崩針,額外增加手術時間;④為更好暴露視野,避免過度鉗夾組織,可采用分層次多點懸吊技術[17],也可利用機械臂支撐周圍組織,以更好暴露視野。
本研究中RALP組術中腎盂輸尿管吻合時間較LP組短,具有統計學意義,但兩組的手術時間無統計學差異。這與Esposito C等人[14]的研究結果一致,但與Braga L H[18]、Andolfi C[4]、Silay M S[19]等人提出的RALP可縮短手術時間不符,與李瀘平等人[7]的研究認為的RALP手術時間偏長亦不符。考慮手術時間長短可能受主刀醫師RAS經驗及團隊配合默契度等多方面影響。相對于一個經驗豐富且配合默契的LP手術團隊而言,RALP開展初期在手術時間方面的優勢確實難以得到充分展現,但除去機械臂連接、團隊配合等影響,單獨統計術中腎盂輸尿管吻合時間,可以發現RALP在縮短手術時間方面具有優勢。陳育貞等人[20]認為,充分的術前準備、正規的專業技術培訓及專業的合作團隊不僅有助于提高手術效率,而且也是確保手術成功的關鍵。因此,筆者建議有條件實施RAS的中心可對整個RAS團隊進行系統培訓,這對縮短手術時間、減少麻醉時間、提高手術安全性及降低住院費用均有意義。
RALP當前所用的8 mm Trocar較LP的5 mm
Trocar所致瘢痕稍大,術后美觀性較差。為進一步貫徹微創理念,Gargollo P C等人[21]在2011年首次報道了隱匿切口法在兒科機器人手術中的應用,該方法通過將所有端口位置隱藏在Pfannenstiel褶皺上達到美容效果。陸續有文獻證實隱匿切口法RALP治療嬰幼兒腎積水的安全性和可行性,且術中和術后并發癥少,推薦在RALP中使用[22-23]。此外,劉一帆等人[24]2022年成功報道了國內首例53 d小嬰兒機器人輔助單孔腹腔鏡腎盂成形術(Robot-assisted Laparoendoscopic Single-site Surgery,R-LESS),其主要通過減少腹部切而來縮短術后恢復時間,減少疼痛,同時有更好的美容結果。有文獻提出對于R-LESS的研究將會成為下一個熱點,并且可能最終替代開放手術和其他微創治療UPJO的術式[6]。但R-LESS的成功率及遠期療效仍需更多病例及隨訪結果來進一步證實。
所以,當前RAL的最主要的局限性然是機器人手術系統昂貴備設備費以及設的維修、保養費用造成用手術成本加高昂。目前幾乎所有RALP相關文獻均提出住院費用高是其不可忽略的局限性。即使有RALP經驗豐富的研究中,可通過縮短其手術時間節省部分麻醉費用,縮短住院時間減少部分住院費用,但機器人輔助手術高昂的開機費用仍會導致總住院費用的增加。相信隨著RAS在國內的推廣、新平臺的引入及我國自主研發的手術機器入深入臨床應用,機器人輔助手術的費用將會顯著降低。
4 結論
RAL在治療兒童UPJO上是安全、有效的,與LP相比,其視野更清晰,縫合更精準,術中吻合時間更短、學習曲線更短、且更加符合人體工程學。其不足之是在于住院費用較高,Trocar孔瘢痕稍大。本研究缺陷在于非完全隨機對照分組、樣本量較小,尚需更大樣本量的完全隨機對照性研究和長期隨訪來證明RALP在治療兒童UPJO中的優勢。
參考文獻
[1] Peters C A, Schlussel R N, Retik A B. Pediatric laparoscopic dismembered pyeloplasty[J]. J Urol, 1995, 153(6): 1962-1965.
[2] Szavay P. Laparoscopic Pyeloplasty for Ureteropelvic junction obstruction[J]. J Laparoendosc Adv Surg Tech A, 2021, 31(10): 1214-1218.
[3] LI P, ZHOU H X, CAO H L, et al. Early robotic-assisted laparoscopic pyeloplasty for infants under 3 months with severe ureteropelvic junction obstruction[J]. Front Pediatr, 2025. DOI: 10.3389/fped.2021.590865.
[4] Andolfi C, Adamic B, Oommen J, et al. Robot-assisted laparoscopic pyeloplasty in infants and children: is it superior to conventional laparoscopy[J]. World J Urol, 2020, 38(8): 1827-1833.
[5] Taktak S, Llewellyn O, Aboelsoud M, et al. Robot-assisted laparoscopic pyeloplasty versus laparoscopic pyeloplasty for pelvi-ureteric junction obstruction in the paediatric population: a systematic review and meta-analysis[J]. Ther Adv Urol, 2014. DOI: 10.1177/1756287219835704.
[6] 申宵茹, 杜浩文, 管哲明, 等. 機器人輔助腹腔鏡治療腎盂輸尿管連接部梗阻的臨床應用及研究進展[J]. 中華小兒外科雜志, 2022, 43(1): 87-92.
[7] 李瀘平, 張俊杰, 張勝利, 等. 機器人輔助腹腔鏡與傳統腹腔鏡在兒童腎盂成形術的應用價值[J]. 中華小兒外科雜志, 2022, 43(1): 14-19.
[8] 中華醫學會小兒外科分會泌尿外科學組. 先天性腎盂輸尿管交界處梗阻診療專家共識[J]. 中華小兒外科雜志, 2018, 39(11): 804-810.
[9] 何雨竹, 倪鑫, 張濰平. 兒童先天性腎盂輸尿管連接部梗阻性腎積水手術治療策略研究進展[J]. 臨床外科雜志, 2021, 29(6): 501-504.
[10] Esposito C, Autorino G, Castagnetti M, et al. Robotics and future technical developments in pediatric urology[J]. Semin Pediatr Surg, 2021, 30(4): 151082.
[11] Jayakumaran J, Patel SD, Gangrade BK, et al. Robotic-assisted laparoscopy in reproductive surgery: a contemporary review[J]. J Robot Surg, 2017, 11(2): 97-109.
[12] Kassite I, Braik K, Villemagne T, et al. The learning curve of robot-assisted laparoscopic pyeloplasty in children: a multi-outcome approach[J]. J Pediatr Urol, 2018, 14(6): 570.e1-570.e10.
[13] Tam Y H, Pang K, Wong Y S, et al. From laparoscopic pyeloplasty to robot-assisted laparoscopic pyeloplasty in primary and reoperative repairs for ureteropelvic junction obstruction in children[J]. J Laparoendosc Adv Surg Tech A, 2018, 28(8): 1012-1018.
[14] Esposito C, Masieri L, Castagnetti M, et al. Robot-assisted vs laparoscopic pyeloplasty in children with uretero-pelvic junction obstruction (UPJO): technical considerations and results[J]. J Pediatr Urol, 2019, 15(6): 667.e1-667.e8.
[15] Dothan D, Raisin G, Jaber J, et al. Learning curve of robotic-assisted laparoscopic pyeloplasty (RALP) in children: how to reach a level of excellence[J]. J Robot Surg, 2021, 15(1): 93-97.
[16] Bowen D K, Lindgren B W, Cheng E Y, et al. Can proctoring affect the learning curve of robotic-assisted laparoscopic pyeloplasty? Experience at a high-volume pediatric robotic surgery center[J]. J Robot Surg, 2017, 11(1): 63-67.
[17] 余小芳, 劉瑋, 曹增才, 等. 分層次多點懸吊技術在腹腔鏡腎盂成形術中的應用研究[J]. 臨床小兒外科雜志, 2022, 21(4): 370-373.
[18] Braga L H, Pace K, DeMaria J, et al. Systematic review and meta-analysis of robotic-assisted versus conventional laparoscopic pyeloplasty for patients with ureteropelvic junction obstruction: effect on operative time, length of hospital stay, postoperative complications, and success rate[J]. Eur Urol, 2009, 56(5): 848-857.
[19] Silay M S, Danacioglu O, Ozel K, et al. Laparoscopy versus robotic-assisted pyeloplasty in children: preliminary results of a pilot prospective randomized controlled trial[J]. World J Urol, 2020, 38(8): 1841-1848.
[20] 陳育貞, 徐哲, 曾慶兵, 等. 達芬奇機器人系統應用于小兒腎積水的術中配合體會[J]. 中山大學學報(醫學科學版), 2017, 38(3): 475-480.
[21] Gargollo PC. Hidden incision endoscopic surgery: description of technique, parental satisfaction and applications[J]. J Urol, 2011, 185(4): 1425-1431.
[22] Hong Y H, DeFoor W R Jr, Reddy P P, et al. Hidden incision endoscopic surgery (HIdES) trocar placement for pediatric robotic pyeloplasty: comparison to traditional port placement[J]. J Robot Surg, 2018, 12(1): 43-47.
[23] 劉宇靜, 劉德鴻, 周輝霞, 等. 隱匿切口法與傳統通道法機器人輔助腹腔鏡小兒腎盂成形術的初步比較[J]. 微創泌尿外科雜志, 2018, 7(1): 6-10.
[24] 劉一帆, 高賀云, 張文, 等. 機器人輔助單孔腹腔鏡下小嬰兒腎盂成形術一例: 國內首例報道[J]. 機器人外科學雜志(中英文), 2022, 3(2): 140-148.
猜你喜歡
少兒美術·書法版(2021年11期)2021-10-20 06:23:28
少兒美術·書法版(2021年8期)2021-10-20 06:08:10
中國實用醫藥(2016年27期)2016-11-30 10:24:02
中國現代醫生(2016年25期)2016-11-19 10:41:13
今日健康(2016年12期)2016-11-17 11:54:31
今日健康(2016年12期)2016-11-17 11:33:40
中國實用醫藥(2016年24期)2016-10-17 03:51:35
雜文選刊(2016年7期)2016-08-02 08:39:56
小天使·一年級語數英綜合(2016年6期)2016-05-14 12:21:05
小學生·新讀寫(2006年6期)2006-06-14 05:16:24