
核探測(cè)機(jī)器人底盤設(shè)計(jì)與越障性能仿真驗(yàn)證
2023-07-07 04:51:12胡俊濤李圖玖朱宇飛張俊俊
西南科技大學(xué)學(xué)報(bào) 2023年2期
關(guān)鍵詞:分析
胡俊濤 李圖玖 朱宇飛 王 淼 張俊俊
(1.西南科技大學(xué)制造科學(xué)與工程學(xué)院 四川綿陽 621010;2.四川核保銳翔科技有限公司 四川綿陽 621010;3.中核第四研究院設(shè)計(jì)工程有限公司 石家莊 050022)
隨著雙碳經(jīng)濟(jì)的持續(xù)推進(jìn),以核能為代表的清潔能源正在快速發(fā)展,但是與之伴隨的核安全問題一直是大家關(guān)注的焦點(diǎn)[1]。受核環(huán)境強(qiáng)電離輻射、毒性、污染控制的限制,對(duì)于有強(qiáng)放射物的反應(yīng)堆、輻照裝置、核退役設(shè)施等建筑體內(nèi)的處置任務(wù),因工作人員無法進(jìn)入事故現(xiàn)場(chǎng)進(jìn)行事故處置工作,給核環(huán)境作業(yè)現(xiàn)場(chǎng)狀況分析和緊急處理帶來了極大困難[2]。以核輻射環(huán)境機(jī)器人系統(tǒng)為代表的高性能、強(qiáng)適應(yīng)、高效率的遙操作型危險(xiǎn)作業(yè)高技術(shù)裝備,對(duì)開展核環(huán)境應(yīng)急偵察、救援、處置等工作有極強(qiáng)的現(xiàn)實(shí)意義[3]。我國對(duì)核能的研究與利用已有幾十年的歷史,期間尚未發(fā)生過一次二級(jí)以上的核事故。近年來隨著我國對(duì)用電需求的激增,核電站的數(shù)量越建越多。核電站運(yùn)行最關(guān)鍵的一環(huán)就是保證核電的安全利用,但涉核的地方往往都具有一定的輻射性,為避免輻射對(duì)工作人員造成損傷,核環(huán)境作業(yè)機(jī)器人是目前最優(yōu)的選擇。由于我國對(duì)核電機(jī)器人技術(shù)的研究起步較晚,對(duì)相關(guān)技術(shù)的研究還不夠成熟,所以目前核電機(jī)器人在工業(yè)上的應(yīng)用還受到很大限制[4]。自日本福島核事故發(fā)生之后,各國都加快了可用于核輻射環(huán)境機(jī)器人的研究,僅福島核事故就有30多臺(tái)機(jī)器人加入應(yīng)急與處置作業(yè),但因各自功能要求不同、現(xiàn)場(chǎng)環(huán)境復(fù)雜,部分機(jī)器人表現(xiàn)欠佳。如美國iRobot公司研制的PackBot履帶機(jī)器人可執(zhí)行拍照、測(cè)量輻射值等任務(wù),其作為第一批進(jìn)入福島核事故現(xiàn)場(chǎng)的機(jī)器人先后執(zhí)行檢測(cè)任務(wù)30余次,但是由于其耐輻射強(qiáng)度不夠,機(jī)器人作業(yè)半徑僅停留在安全殼之外的環(huán)境。由日本千葉工業(yè)大學(xué)研發(fā)的地震火山專用機(jī)器人Quince-1可用于灰塵采樣,但是在執(zhí)行任務(wù)時(shí)由于線纜問題而被永久困在了反應(yīng)堆大樓內(nèi)部。日本東京電力公司研發(fā)的蝎子機(jī)器人同樣是在執(zhí)行任務(wù)時(shí)由于履帶嵌入異物而導(dǎo)致無法移動(dòng),為了不影響后續(xù)的調(diào)查,東京電力公司被迫剪斷供電線纜,“蝎子”也自此長(zhǎng)眠在了反應(yīng)堆內(nèi)[5]。由此可見,用于核環(huán)境的機(jī)器人不僅要能夠承受高強(qiáng)度的輻射,還要具有較好的越障與機(jī)動(dòng)性能。針對(duì)上述問題,筆者在前期對(duì)核環(huán)境機(jī)器人研究的基礎(chǔ)上設(shè)計(jì)了一款可用于強(qiáng)輻射場(chǎng)環(huán)境、具有較好通過性和地形適應(yīng)能力同時(shí)附有減震系統(tǒng)的核探測(cè)機(jī)器人。相較于目前核環(huán)境中的作業(yè)機(jī)器人,該機(jī)器人搭載多種探測(cè)傳感器,并對(duì)關(guān)鍵驅(qū)控部分進(jìn)行了輻射屏蔽,使得機(jī)器人能夠在強(qiáng)輻射場(chǎng)環(huán)境下完成探查、巡檢作業(yè)。針對(duì)目前機(jī)器人地形適應(yīng)能力較差的問題,機(jī)器人的履帶移動(dòng)底盤設(shè)計(jì)采用驅(qū)動(dòng)輪與地面具有一定角度的離地角同時(shí)使誘導(dǎo)輪接地的方法,使該機(jī)器人具有較好的越障性能和較好的通過性,能夠在狹窄環(huán)境下自由移動(dòng),同時(shí)能夠?qū)崿F(xiàn)原地轉(zhuǎn)向。利用動(dòng)力學(xué)仿真軟件RecurDyn對(duì)機(jī)器人進(jìn)行動(dòng)力學(xué)仿真以驗(yàn)證其越障性能。為減少機(jī)器人震動(dòng)對(duì)探測(cè)器造成的影響,機(jī)器人移動(dòng)底盤設(shè)計(jì)了減震結(jié)構(gòu),并利用有限元分析對(duì)該減震機(jī)構(gòu)進(jìn)行了模態(tài)分析。
1 方案設(shè)計(jì)
1.1 底盤方案設(shè)計(jì)
該探測(cè)機(jī)器人主要由履帶移動(dòng)底盤、減震系統(tǒng)、車身、檢測(cè)設(shè)備4部分組成。(1)履帶移動(dòng)底盤:包括履帶、驅(qū)動(dòng)輪、導(dǎo)向輪、負(fù)重輪、張緊輪等;(2)減震系統(tǒng):包括減震支架、直徑為3.5 mm的減震彈簧、阻尼器;(3)車身:主要用于安裝電池、驅(qū)動(dòng)電機(jī)以及控制部分元器件的機(jī)械結(jié)構(gòu);(4)檢測(cè)設(shè)備:主要包括輻射環(huán)境探測(cè)設(shè)備,如γ劑量率儀、中子劑量率儀、γ相機(jī)等。機(jī)器人采用雙電機(jī)驅(qū)動(dòng)方式,兩側(cè)驅(qū)動(dòng)輪上各安裝有一個(gè)驅(qū)動(dòng)電機(jī),可控制機(jī)器人的前進(jìn)、后退、轉(zhuǎn)向。機(jī)器人主要技術(shù)指標(biāo)如表1所示。

表1 機(jī)器人技術(shù)指標(biāo)Table 1 Technical index of robot
該探測(cè)機(jī)器人整體結(jié)構(gòu)如圖1所示,單側(cè)行走組件如圖2所示。機(jī)器人減震系統(tǒng)上部與車身相連,下部與履帶移動(dòng)底盤的負(fù)重輪相連,在運(yùn)行過程中不僅能將車身的一部分震動(dòng)由減震系統(tǒng)傳至地面而且還能減少震動(dòng)對(duì)探測(cè)設(shè)備產(chǎn)生的影響。驅(qū)動(dòng)輪與地面具有一定角度的接地角,可提高機(jī)器人的越障性能。
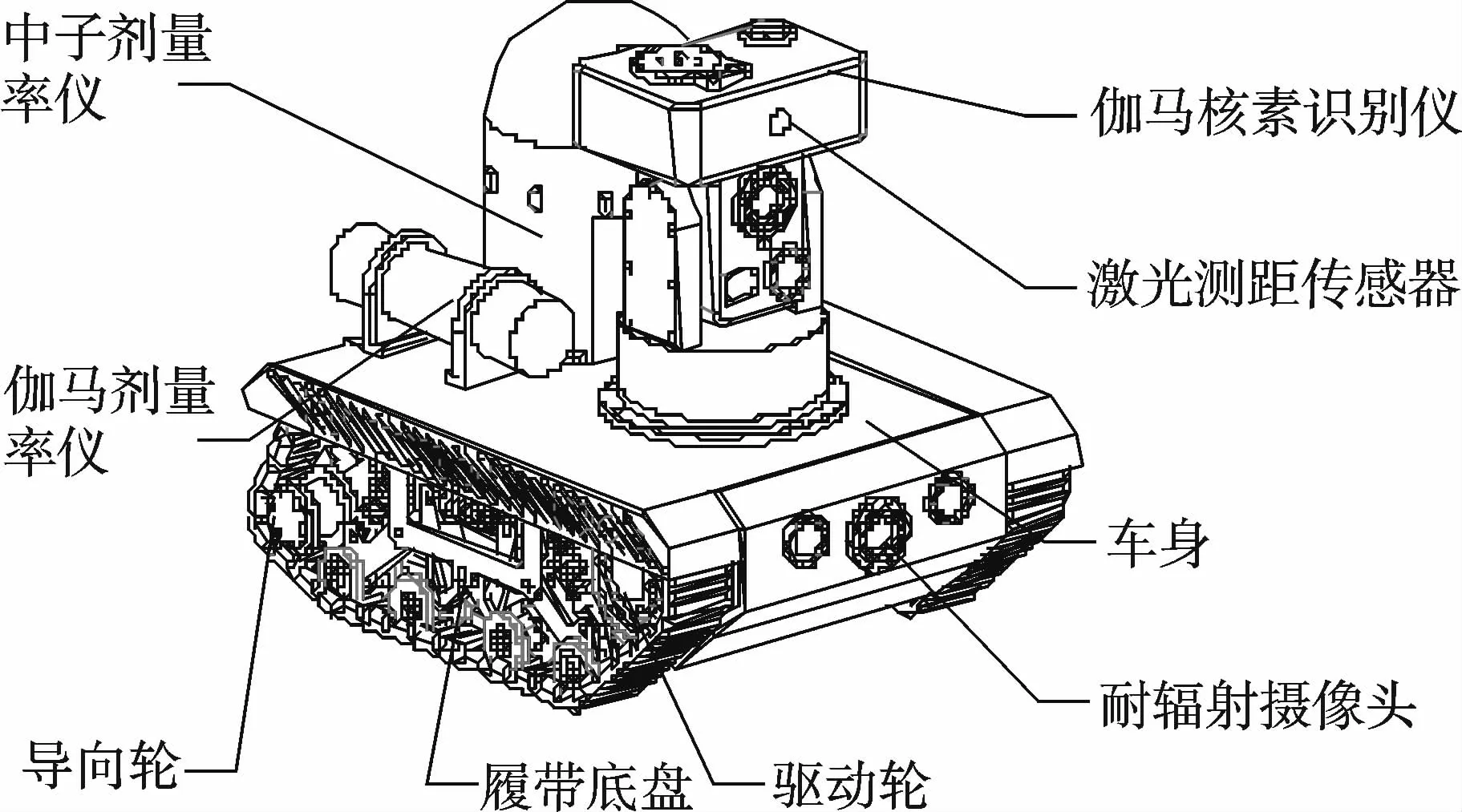
圖1 機(jī)器人整體結(jié)構(gòu)示意圖Fig.1 Overall structure diagram of robot

圖2 單側(cè)行走組件Fig.2 Unilateral traveling assembly
1.2 相關(guān)參數(shù)確定
1.2.1 履帶參數(shù)
履帶是整個(gè)機(jī)構(gòu)中唯一直接接觸地面的物體,需要經(jīng)常與各種路面如泥水、凹坑、凸臺(tái)等直接接觸。不僅需要承受機(jī)器人本體的重量,而且還要與輪軌正確配合,保證足夠的驅(qū)動(dòng)力,所以履帶參數(shù)的確定至關(guān)重要[6]。與履帶相關(guān)的參數(shù)主要有履帶節(jié)距、履帶寬度、有效接地長(zhǎng)度等。
(1)履帶節(jié)距p。履帶節(jié)距計(jì)算公式為[7]:
式中:m為整機(jī)質(zhì)量,m取值為130 kg;a1為底盤設(shè)計(jì)經(jīng)驗(yàn)系數(shù),取值15.0~17.5。計(jì)算可得節(jié)距p的取值范圍50.5~58.9 mm,本文選取節(jié)距為55 mm。
(2)履帶寬度b。履帶寬度與接地比壓直接相關(guān),接地比壓是指與地面直接接觸物體單位面積上所承受的垂直載荷,它直接影響機(jī)械行駛過程中的穩(wěn)定性和通過性[6]。履帶寬度越大,接地比壓越小,履帶在路面行駛平穩(wěn)性越好。履帶寬度計(jì)算公式如下[8]:
式中:m為整機(jī)質(zhì)量,取為130 kg;a2為底盤設(shè)計(jì)經(jīng)驗(yàn)系數(shù),取值0.9~1.1。最終選取b為95 mm。
(3)履帶有效接地長(zhǎng)度。履帶有效接地長(zhǎng)度L0的計(jì)算方法為:
式中:G為整機(jī)所受重力,N;b為履帶寬度,mm;P為許用接地壓力,MPa。根據(jù)工作情況選擇b/L為一般用途[9],b/L=0.18~0.22。由于本文設(shè)計(jì)的履帶寬度為95 mm,所以接地長(zhǎng)度L≥527 mm,取L0=530 mm。
1.2.2 輪組參數(shù)
履帶底盤輪組主要包括驅(qū)動(dòng)輪、導(dǎo)向輪、負(fù)重輪。驅(qū)動(dòng)輪負(fù)責(zé)提供驅(qū)動(dòng)力矩,導(dǎo)向輪防止履帶脫軌與跑偏,負(fù)重輪負(fù)責(zé)將本體重量傳輸至地面[10]。
(1)驅(qū)動(dòng)輪直徑D。驅(qū)動(dòng)輪直徑由驅(qū)動(dòng)輪齒數(shù)與履帶節(jié)距共同決定,其經(jīng)驗(yàn)公式為:
式中:p為履帶節(jié)距;z為驅(qū)動(dòng)輪齒數(shù),一般取值為12~15,考慮到輪齒的磨損均勻,選擇齒數(shù)15。經(jīng)計(jì)算得驅(qū)動(dòng)輪直徑為135 mm。
(2)導(dǎo)向輪D1。導(dǎo)向輪與驅(qū)動(dòng)輪之間的關(guān)系為[11]:
則導(dǎo)向輪直徑為121 mm。
(3)負(fù)重輪D2。負(fù)重輪經(jīng)常在各種惡劣的路面行走,如泥水、凹坑等,因此負(fù)重輪要有較高的硬度和強(qiáng)度,并且具有一定的抗沖擊與耐腐蝕性能,該機(jī)器人負(fù)重輪個(gè)數(shù)取為4個(gè)。負(fù)重輪直徑與節(jié)距之間的關(guān)系為:
式中:a3為底盤設(shè)計(jì)經(jīng)驗(yàn)系數(shù),取值1.00~1.25。經(jīng)計(jì)算選取負(fù)重輪直徑為60 mm。
1.3 耐輻射設(shè)計(jì)
目前機(jī)器人在耐輻射方面主要是針對(duì)關(guān)鍵部件采取鉛屏蔽的方式來實(shí)現(xiàn),本文設(shè)計(jì)的機(jī)器人需要重點(diǎn)防護(hù)部分為驅(qū)控單元,主要防護(hù)射線為γ射線。其鉛防護(hù)層厚度需要根據(jù)總輻照劑量、劑量率當(dāng)量等因素來確定。電子電路元器件耐輻射能力預(yù)估為100 Gy(根據(jù)實(shí)驗(yàn)室以往項(xiàng)目數(shù)據(jù),普通半導(dǎo)體器件耐輻照能力不低于100 Gy),則屏蔽前劑量:I1=500 Gy(總輻照劑量),屏蔽后劑量I2=100 Gy,因此減弱倍數(shù)K=5。則有:
式中:n=logK/log2=2.32;Δ(1/2)為半減弱厚度,cm;d為屏蔽層厚度,cm。
常用γ射線的Δ(1/2)如表2所示。對(duì)于本論文機(jī)器人,Δ(1/2)=0.7 cm,帶入上式求得d=1.6 cm,即在鉛層厚度為1.6 cm的情況下驅(qū)控部分電子元器件在接收總輻照劑量500 Gy的照射后仍可以正常工作。
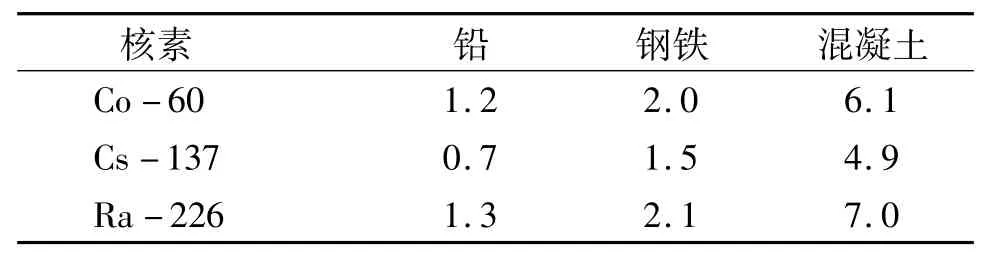
表2 常用γ射線的Δ(1/2)Table 2 CommonγradialΔ(1/2)
2 減震系統(tǒng)模態(tài)分析
為了減少震動(dòng)對(duì)探測(cè)器造成的影響,現(xiàn)利用ANSYS有限元分析軟件對(duì)所設(shè)計(jì)的減震系統(tǒng)進(jìn)行模態(tài)分析[12]。(1)模型簡(jiǎn)化、材料屬性賦予:主要將一些螺紋線、倒角等不重要的特征結(jié)構(gòu)進(jìn)行簡(jiǎn)化和刪除以增加計(jì)算性能,同時(shí)對(duì)不同部位零件進(jìn)行材料屬性賦予,并設(shè)置相應(yīng)的連接關(guān)系,包括彈簧阻尼器的添加。(2)網(wǎng)格劃分、邊界條件設(shè)置:考慮到零件的尺寸,將網(wǎng)格的默認(rèn)尺寸設(shè)置為5 mm,并采用四面體網(wǎng)格進(jìn)行劃分,共劃分出134 798個(gè)單元,314 994個(gè)節(jié)點(diǎn),然后將減震架與車體連接位置的側(cè)板固定。(3)模態(tài)求解:將求解模態(tài)輸出階數(shù)設(shè)置為6階,對(duì)于一般工作情況前6階模態(tài)即可滿足要求。圖3為同一階模態(tài)下有無減震變形對(duì)比圖,表3為減震系統(tǒng)模態(tài)分析結(jié)果。

圖3 有無減震對(duì)比圖Fig.3 Comparison diagram with and without shock absorption
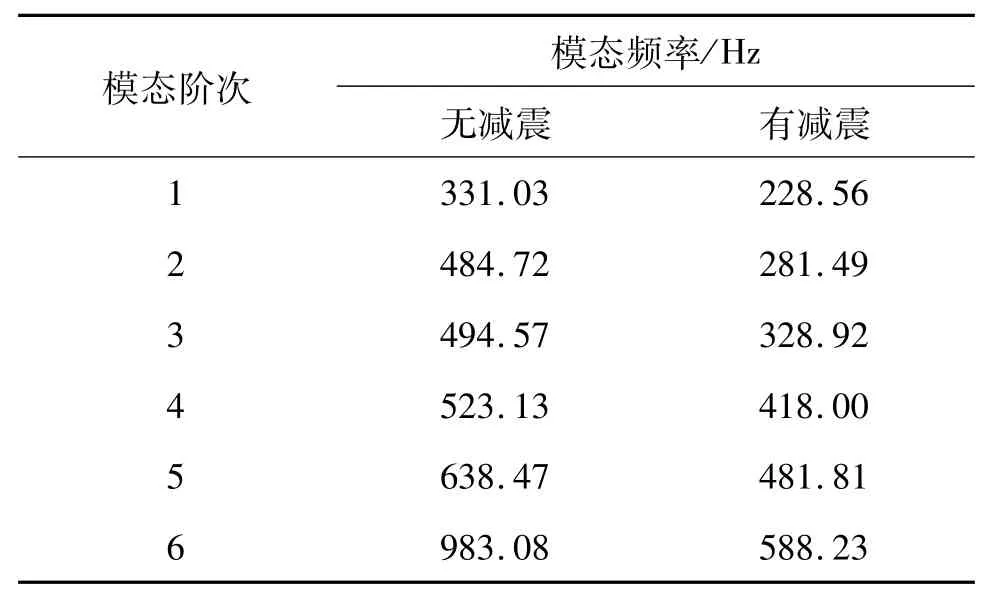
表3 模態(tài)分析結(jié)果Table 3 M odal analysis results
從表3分析結(jié)果可知,當(dāng)添加減震器時(shí)系統(tǒng)頻率要明顯低于無減震器模態(tài)頻率,證明減震器在一定程度上起到了降低系統(tǒng)頻率的作用。
3 運(yùn)動(dòng)學(xué)分析
3.1 上下坡分析
機(jī)器人在上下坡時(shí)要滿足以下要求:(1)上坡時(shí)要有足夠的驅(qū)動(dòng)力;(2)上坡時(shí)履帶不出現(xiàn)打滑;(3)上下坡時(shí)不出現(xiàn)傾覆現(xiàn)象。針對(duì)以上要求,對(duì)上坡時(shí)機(jī)器人進(jìn)行受力分析,由于下坡時(shí)受力狀態(tài)相同,不再單獨(dú)對(duì)下坡進(jìn)行受力分析。上坡時(shí)受力狀態(tài)如圖4所示。
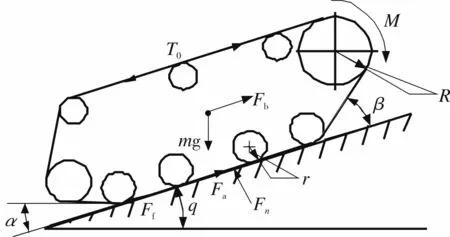
圖4 爬坡受力分析Fig.4 Force analysis during climbing
上坡時(shí)機(jī)器人力學(xué)平衡方程為:
式中:Fa為履帶有效牽引力;Ff為行駛阻力;Fb為啟動(dòng)慣性力。Fa,F(xiàn)b由經(jīng)驗(yàn)公式(9)確定:
行駛阻力Ff計(jì)算過程如式(10)[13]:
式中:Ff0為內(nèi)部滾動(dòng)阻力;Ff1為履帶張緊力在主動(dòng)輪與誘導(dǎo)輪上引起的阻力;Ff2為履帶張緊力在負(fù)重輪上引起的阻力;Ff3為履帶在嚙合過程中引起的阻力;Zd為主動(dòng)輪齒數(shù);T0為履帶張緊力。取m為130 kg,λ根據(jù)路況選取為0.3,θ為30度,考慮張緊力對(duì)滾動(dòng)摩擦的影響,取T0為0.5 mg,滾動(dòng)摩擦系數(shù)μ1取為0.02,μ2取為0.03,μ3取為0.02,最終經(jīng)過計(jì)算得驅(qū)動(dòng)輪爬坡所需轉(zhuǎn)矩為35.56 N·m。
3.2 翻越凸臺(tái)
履帶翻越凸臺(tái)的過程主要分為以下3步:履帶前角接觸凸臺(tái)、爬升、翻越凸臺(tái)。其中爬升階段是決定能否成功翻越障礙物的關(guān)鍵一步。圖5所示為履帶接觸障礙物之后爬升階段的受力示意圖。

圖5 翻越凸臺(tái)受力分析Fig.5 Force analysis during turning boss
翻越凸臺(tái)時(shí)機(jī)器人力與力矩平衡方程為[14]:
式中:H為履帶接觸障礙物高度;xmg,ymg為質(zhì)心坐標(biāo);J為機(jī)器人轉(zhuǎn)動(dòng)慣量;Ra,Rb,Rc分別為機(jī)器人驅(qū)動(dòng)輪、張緊輪、導(dǎo)向輪半徑;F1,F(xiàn)2為有效驅(qū)動(dòng)動(dòng)力;f1,f2為行駛阻力;h為底盤驅(qū)動(dòng)輪中心距地高度。由履帶結(jié)構(gòu)參數(shù)可知[15]:
若機(jī)器人越障成功,則機(jī)器人越障所需轉(zhuǎn)矩為:
式中:θ為履帶爬升階段與地面的夾角;φ為內(nèi)摩擦角。
3.3 跨越溝壑分析
機(jī)器人在運(yùn)行過程中,經(jīng)常要遇到各種凹凸不平的路面,為了測(cè)試機(jī)器人所能跨越溝壑的寬度,現(xiàn)對(duì)機(jī)器人在跨越溝壑的臨界階段進(jìn)行分析。圖6為機(jī)器人在跨越溝壑時(shí)臨界階段的受力分析示意圖。
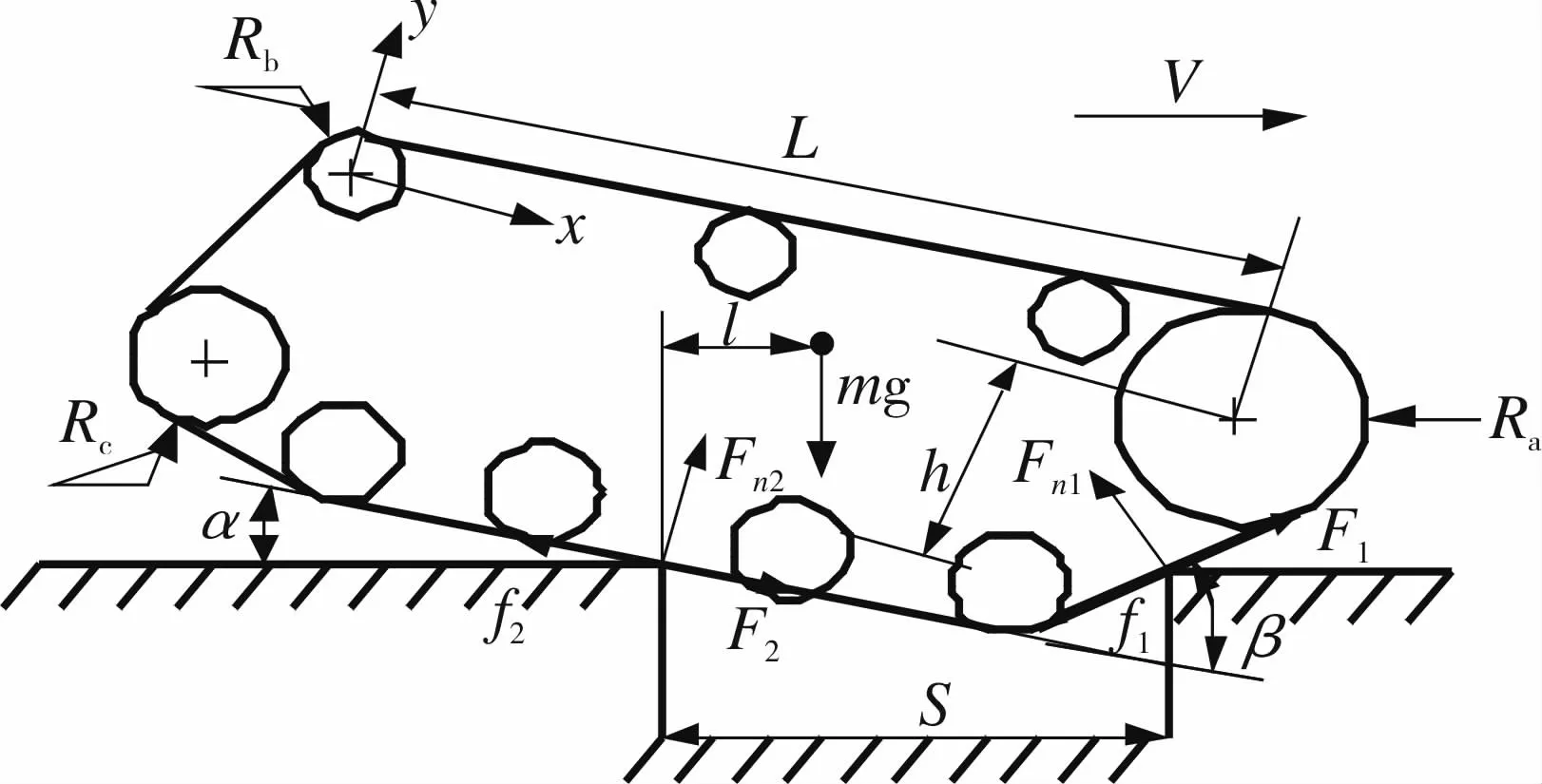
圖6 跨越溝壑受力分析Fig.6 Force analysis during crossing gullies
機(jī)器人在跨越溝壑時(shí)臨界階段的力與力矩平衡方程為[16]:
式中:S為溝壑寬度;l為機(jī)器人底盤質(zhì)心至溝壑邊界距離;L為驅(qū)動(dòng)輪中心至張緊輪中心距;xmg,ymg為機(jī)器人質(zhì)心坐標(biāo)。為了保證機(jī)器人在圖6所示的位置不打滑,則需要滿足有效牽引力要小于最大牽引力:
式中:φ為內(nèi)摩擦角,根據(jù)設(shè)計(jì)要求,取為30°。如果機(jī)器人以勻速跨越溝壑,則在其臨界位置時(shí),加速度為零,即F2=Fn2·tanφ時(shí)求得F1≤Fn1·tanφ以得到機(jī)器人所能跨越溝壑的最大臨界值為[11]:
式中:Ra為驅(qū)動(dòng)輪半徑;μ為滾動(dòng)阻力系數(shù);Rc為導(dǎo)向輪半徑;α為履帶在跨越溝壑過程中與水平路面之間的夾角。
4 越障仿真
4.1 仿真參數(shù)設(shè)置
仿真參數(shù)的設(shè)置不僅決定了仿真的成功與失敗,同時(shí)也決定了仿真的結(jié)果是否符合預(yù)期。仿真主要涉及到的參數(shù)有驅(qū)動(dòng)參數(shù)、履帶襯套力、摩擦系數(shù)、材料參數(shù)、接觸角等[17]。首先是關(guān)于驅(qū)動(dòng)參數(shù)的設(shè)置,驅(qū)動(dòng)參數(shù)主要采用step插值函數(shù)進(jìn)行驅(qū)動(dòng),step函數(shù)采用三次多項(xiàng)式在兩點(diǎn)之間進(jìn)行插值。具體形式為step(x,x0,h0,x1,h1)[18]:
在機(jī)器人運(yùn)動(dòng)過程中,存在多處摩擦,需要對(duì)不同位置的摩擦進(jìn)行單獨(dú)定義。具體摩擦系數(shù)與零件材質(zhì)設(shè)置如表4所示。

表4 摩擦系數(shù)與對(duì)應(yīng)關(guān)系Table 4 Friction coefficient and corresponding relationship
所有越障環(huán)境均采用硬質(zhì)路面,重力沿y軸方向向下,由于履帶為整個(gè)仿真系統(tǒng)中唯一的柔性體,需要定義襯套力,履帶鏈節(jié)之間襯套力主要是通過剛度矩陣與阻尼矩陣來實(shí)現(xiàn)的,所以需要在履帶屬性定義中對(duì)履帶的剛度和阻尼進(jìn)行定義[19]。定義結(jié)果如表5所示。

表5 剛度與阻尼系數(shù)Table 5 Stiffness and damping coefficient
4.2 仿真實(shí)驗(yàn)及結(jié)果分析
4.2.1 上下坡
考慮到實(shí)際環(huán)境中一般路況角度都在25度以內(nèi),實(shí)驗(yàn)?zāi)M路面角度采用30度,以此來檢驗(yàn)機(jī)器人的爬坡性能。機(jī)器人爬坡時(shí)的驅(qū)動(dòng)采用增量式step函數(shù)進(jìn)行驅(qū)動(dòng),其驅(qū)動(dòng)函數(shù)為step(time,0.5,0,1,0.95π)+step(time,12,0,14,0.7π),其中0.5~12 s為勻速行駛,12~14 s時(shí)對(duì)速度進(jìn)行調(diào)整,減速下坡,以免速度過快導(dǎo)致車體傾覆。圖7為機(jī)器人爬坡仿真過程示意圖,圖8-圖9為仿真過程中機(jī)器人驅(qū)動(dòng)扭矩及相對(duì)速度與質(zhì)心沿y軸的變化情況。

圖7 機(jī)器人爬坡仿真Fig.7 Uphill simulation of robot
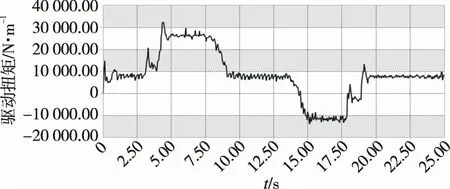
圖8 機(jī)器人上下坡驅(qū)動(dòng)轉(zhuǎn)矩Fig.8 Driving torque of robot up and down slope
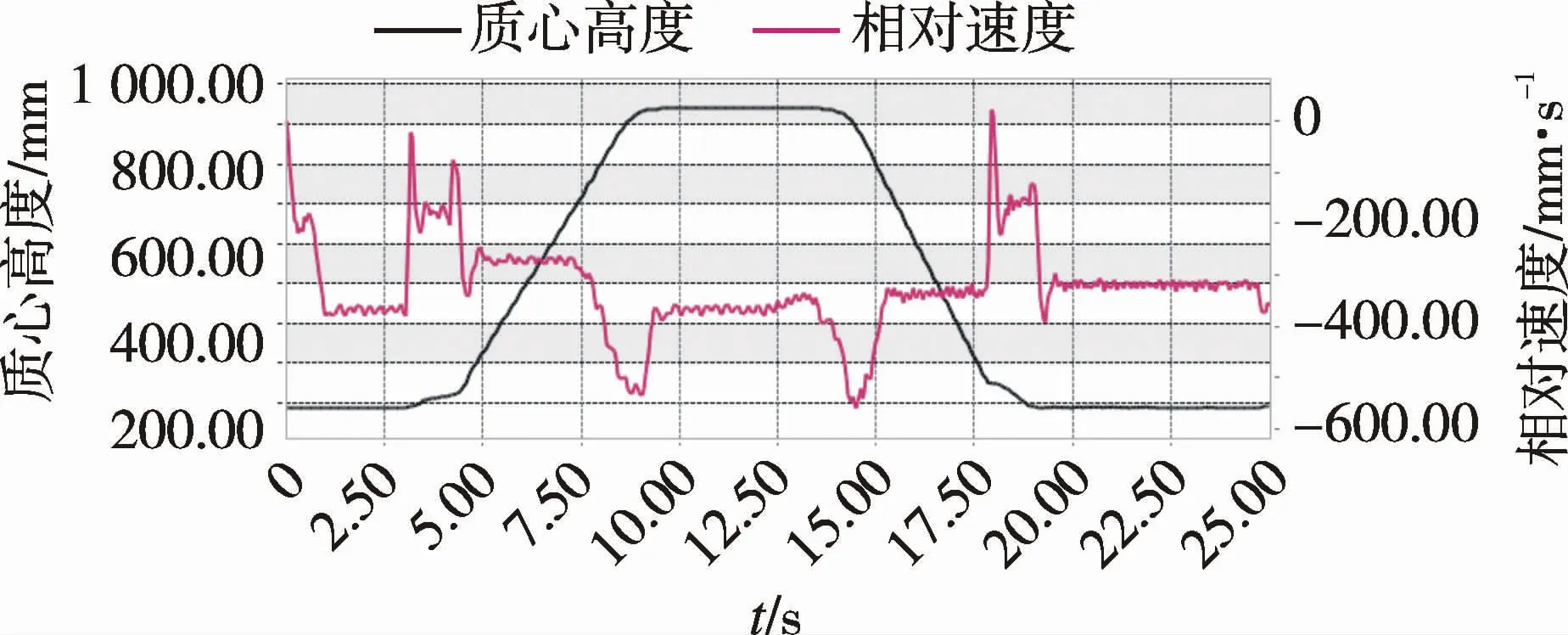
圖9 相對(duì)速度與質(zhì)心沿y軸變化曲線Fig.9 Change curves of relative velocity and center of mass along y-axis
由圖8分析結(jié)果可知,機(jī)器人爬上坡度角為30度的路面所需最大轉(zhuǎn)矩為32 N·m,在爬坡過程中保持了較好的穩(wěn)定性,在上下坡過程中均未出現(xiàn)側(cè)翻或傾覆現(xiàn)象,滿足設(shè)計(jì)指標(biāo)爬坡25度的要求。重心沿y軸變化曲線與路面變化趨勢(shì)高度一致,相對(duì)速度總體變化較小,僅在剛開始上坡與下坡時(shí)速度發(fā)生短時(shí)突變,最大相對(duì)速度為0.55 m/s,在合理數(shù)據(jù)范圍之內(nèi)。
4.2.2 翻越凸臺(tái)
機(jī)器人在翻越凸臺(tái)障礙時(shí)主要過程有以下3步;接觸凸臺(tái)、攀升凸臺(tái)、翻越凸臺(tái),在翻越過程中機(jī)器人的質(zhì)心不斷發(fā)生變化,為了測(cè)出機(jī)器人所能翻越凸臺(tái)最大高度,分別在路面設(shè)置了多個(gè)高度不同的凸臺(tái),通過多次仿真對(duì)比分析,確定了機(jī)器人所能跨越凸臺(tái)的最高高度并且得到了機(jī)器人所需驅(qū)動(dòng)扭矩。具體仿真分析過程以及分析結(jié)果如圖10-圖12所示。

圖10 機(jī)器人翻越凸臺(tái)Fig.10 Robot over boss
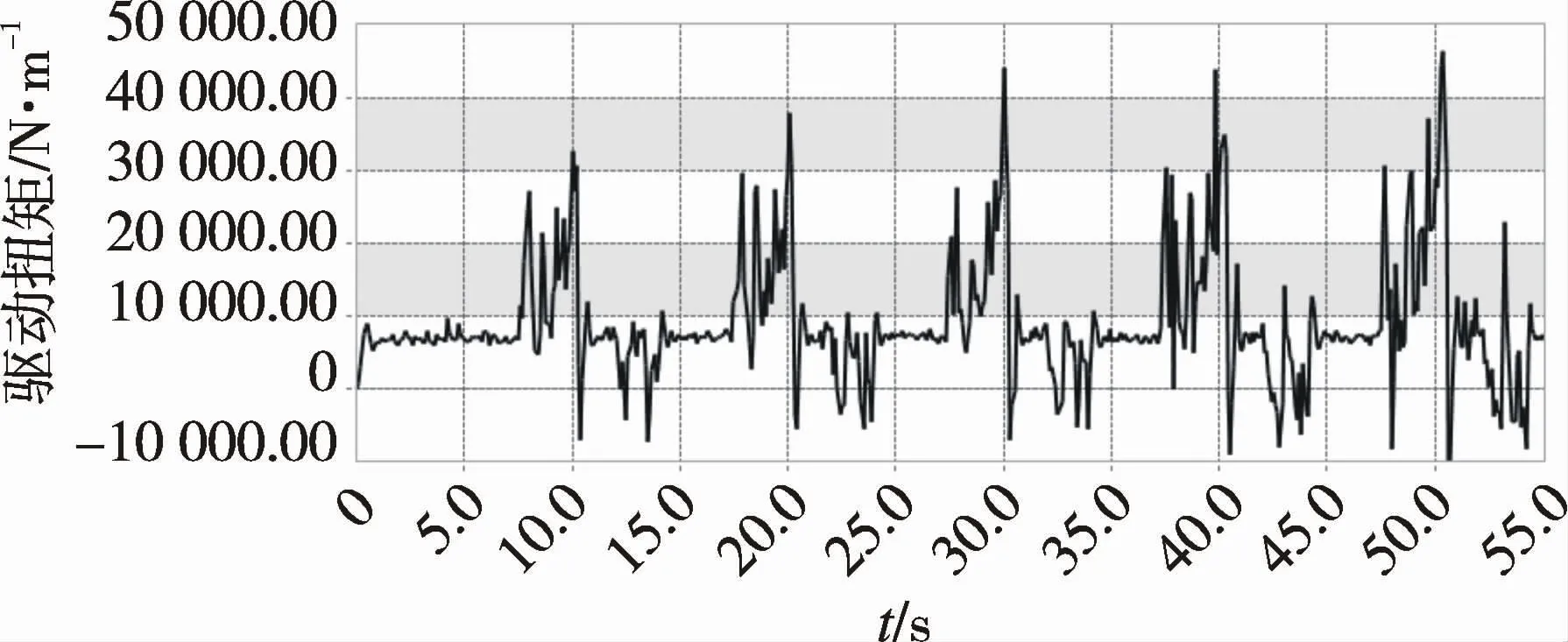
圖11 翻越凸臺(tái)扭矩變化Fig.11 Torque change over boss
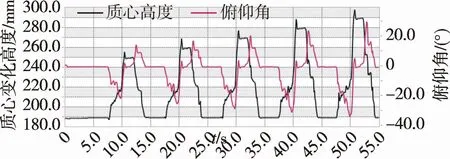
圖12 機(jī)器人質(zhì)心高度與俯仰角度變化曲線Fig.12 Variation curves of centroid height and pitch angle of robot
由圖12分析結(jié)果可知,機(jī)器人在翻越凸臺(tái)過程中俯仰角度變化范圍為 ±30度之內(nèi),該角度和凸臺(tái)高度與水平路面所成夾角相一致,質(zhì)心高度在y軸變化范圍隨著凸臺(tái)的高度變化而變化,與設(shè)置凸臺(tái)高度相同,反映了機(jī)器人越障過程的穩(wěn)定性。其翻越不同高度凸臺(tái)所需最大扭矩如表6所示。其中機(jī)器人所能翻越凸臺(tái)高度最大值為100 mm,最大扭矩出現(xiàn)在跨越最高凸臺(tái)時(shí),為46.7 N·m。
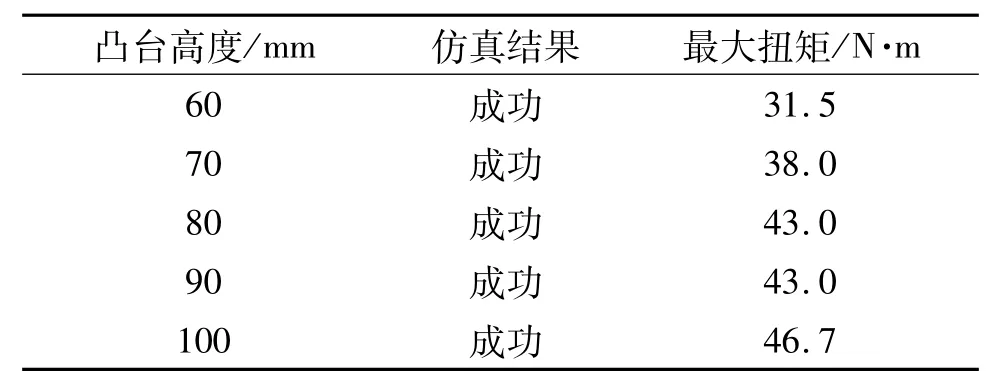
表6 實(shí)驗(yàn)參數(shù)與結(jié)果Table 6 Experimental parameters and results
4.2.3 跨越溝壑
機(jī)器人質(zhì)心位置分布情況在其跨越溝壑過程中至關(guān)重要,通過質(zhì)心位置不僅可以判斷出機(jī)器人越障是否成功同時(shí)還能反映出機(jī)器人越障過程中的穩(wěn)定性。圖13所示為機(jī)器人跨越溝壑過程仿真分析示意圖。

圖13 機(jī)器人跨越溝壑Fig.13 Robot crossing ravine
機(jī)器人在跨越溝壑過程中驅(qū)動(dòng)扭矩、質(zhì)心偏航角以及質(zhì)心沿y軸變化情況分別如圖14-圖16所示。
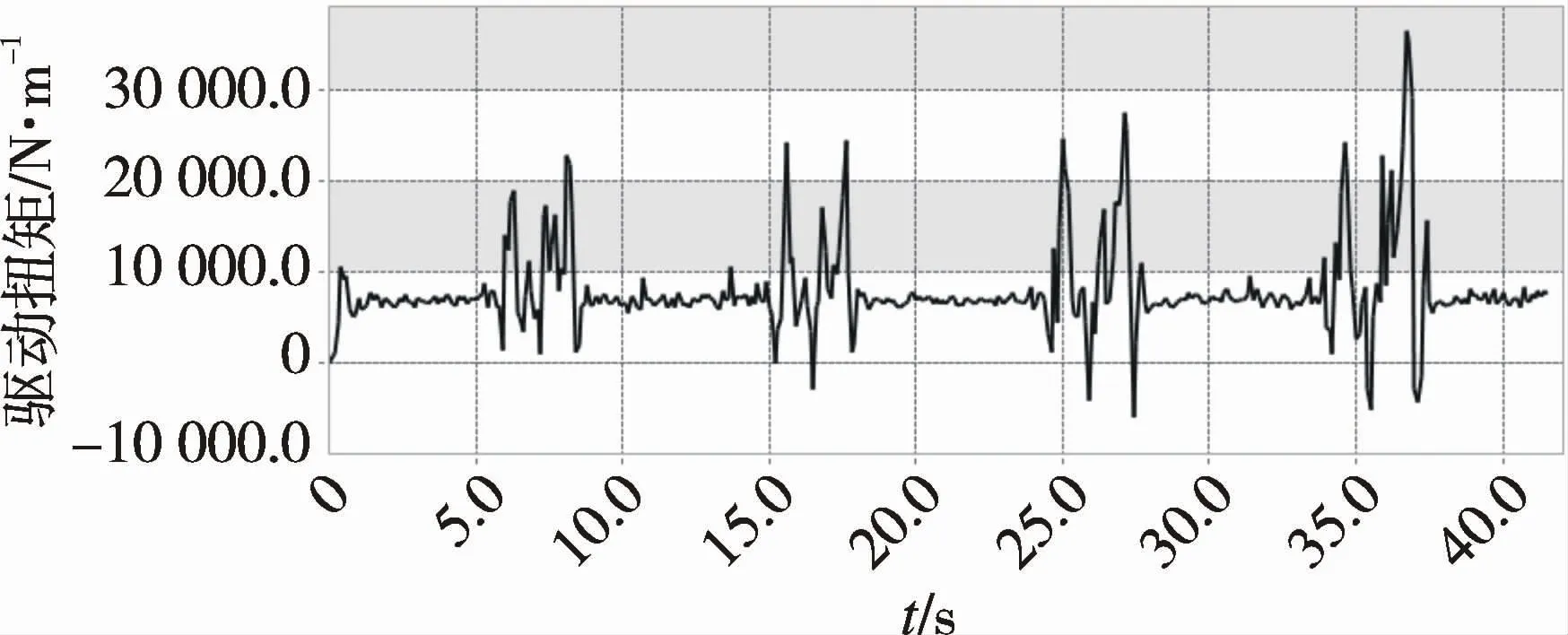
圖14 跨越溝壑扭矩變化Fig.14 Torque variation across gully

圖15 質(zhì)心偏航角Fig.15 Centroid yaw angle
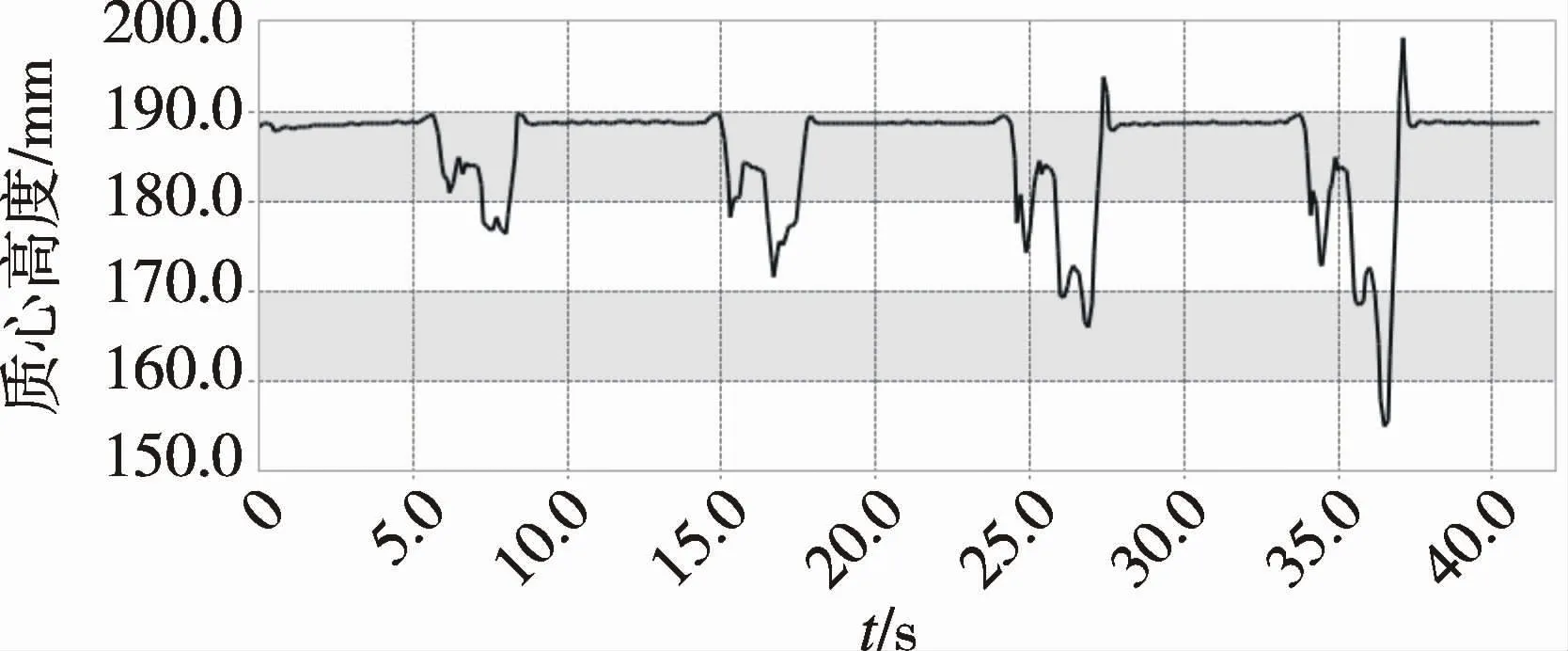
圖16 質(zhì)心沿y軸變化曲線Fig.16 Change curve of centroid along y-axis
由多次仿真結(jié)果得出機(jī)器人可以跨越220 mm寬的溝壑,經(jīng)過多次對(duì)比仿真實(shí)驗(yàn),測(cè)出了機(jī)器人所能跨越溝壑寬度最大值為250 mm,最大力矩出現(xiàn)在機(jī)器人跨越最寬溝壑前端與溝壑邊界發(fā)生碰撞時(shí),為38 N·m。機(jī)器人在跨越不同寬度溝壑時(shí),其質(zhì)心沿y軸變化范圍在30 mm之內(nèi),質(zhì)心偏航角的變化范圍在 -22°~10°之間,運(yùn)行過程中整體變化角度與所設(shè)置溝壑寬度相符,穩(wěn)定性較好。
5 結(jié)論
針對(duì)核輻射檢測(cè)問題,設(shè)計(jì)了一款尺寸小、負(fù)載能力強(qiáng)、同時(shí)具有較強(qiáng)的地形適應(yīng)能力的履帶式探測(cè)機(jī)器人。(1)通過計(jì)算分析確定了履帶移動(dòng)底盤的關(guān)鍵參數(shù),并利用三維繪圖軟件SolidWorks繪制出了三維模型。(2)對(duì)機(jī)器人在不同越障情況下進(jìn)行了力學(xué)分析,得出了機(jī)器人在臨界越障情況下所需滿足的力學(xué)方程。(3)利用動(dòng)力學(xué)仿真軟件RecurDyn對(duì)機(jī)器人進(jìn)行了動(dòng)力學(xué)分析,得出了機(jī)器人在越障過程中質(zhì)心、速度、驅(qū)動(dòng)轉(zhuǎn)矩等的變化。研究表明機(jī)器人結(jié)構(gòu)設(shè)計(jì)合理且擁有較好的越障通過性,尤其在翻越圓臺(tái)障礙時(shí)結(jié)果超出預(yù)設(shè)目標(biāo),證明了機(jī)器人設(shè)計(jì)的可行性,為進(jìn)一步實(shí)驗(yàn)樣機(jī)的研制提供了理論依據(jù)。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財(cái)經(jīng)界(學(xué)術(shù)版)(2015年20期)2015-12-23 09:20:13
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
