基于支持向量機的衛星姿控系統的故障診斷研究
2023-07-12 08:30:48李翔宇
南方農機 2023年14期
李翔宇 ,李 帥
(沈陽理工大學,遼寧 沈陽 110158)
0 引言
隨著太空探索的不斷深入以及人們對網絡通信的要求越來越高,近年來大量衛星被發射[1-2]。盡管航天器經過精心設計和測試以滿足其使命,但許多航天器很早就遭遇了不可恢復的在軌故障。這些故障將會導致航天器預期壽命縮短、飛行能力退化甚至阻礙航天器完成其主要使命。其中,姿態與軌道控制分系統重組了許多關鍵系統,主要控制航天器的姿態和軌道,其發生故障將會嚴重損壞航天器。像“開普勒”空間望遠鏡上的4 個反作用輪中的2 個報廢,會極大地威脅已收獲頗豐的望遠鏡搜尋行星的旅程[3]。國外研究者分析了1980—2005 年全世界近130 個航天器中發生的156 次在軌故障,研究表明:及時對在軌航天器進行故障檢測和判別對衛星飛行任務意義重大[4]。
故障檢測通常由三部分組成:故障檢測、故障隔離、故障識別。現有航天器姿態控制系統的故障檢測方法分為兩類:基于模型的方法、基于數據驅動的方法。航天器故障診斷細化分類如圖1所示。
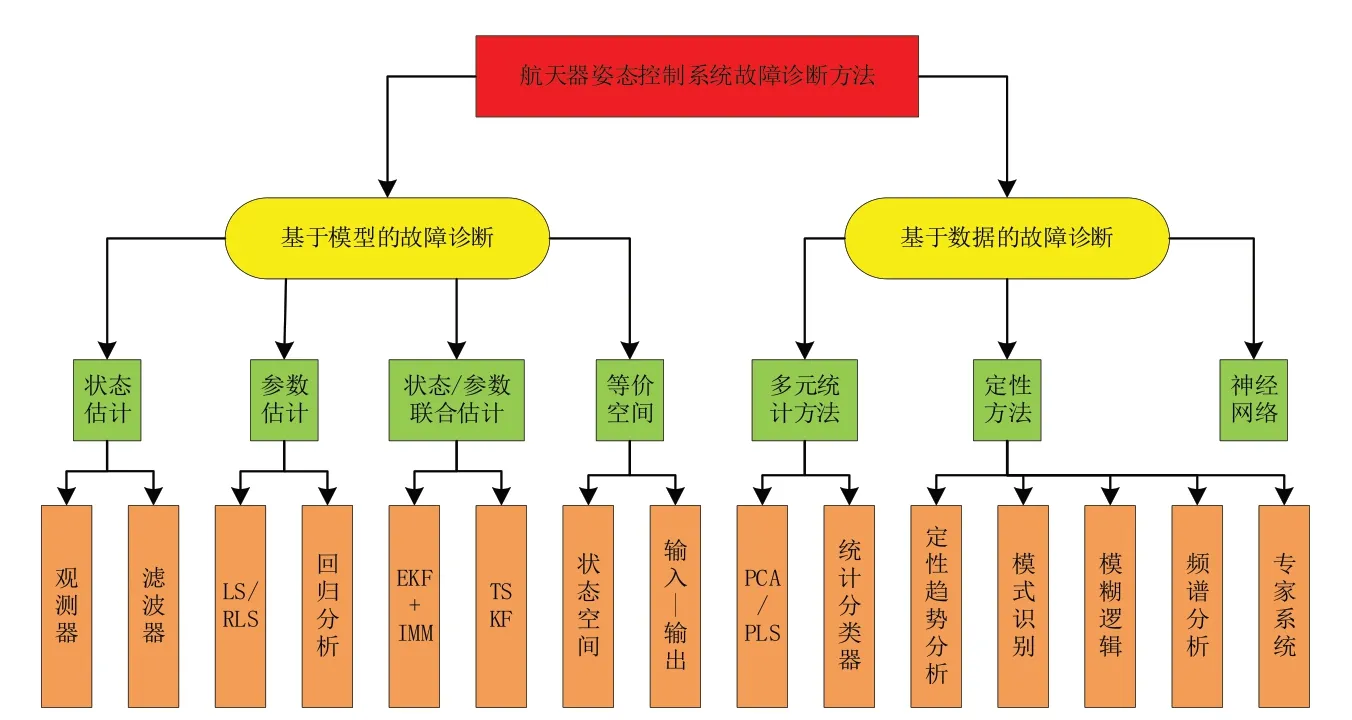
圖1 航天器故障診斷細化分類
在故障診斷發展的初期,由于生產力、技術限制,人們使用的系統簡易,出現的故障模式簡單,往往建模能很好地解決故障問題,所以基于解析模型的方法是發展最早、研究最系統的一種故障診斷方法[5]。基于解析模型的故障診斷方法具有不需要另增加其他物理設備的優點,但復雜系統需要極強的專業知識、嚴格的數學推導、敏銳的誤差感知,建模難度極大。
基于數據驅動的方法不依賴系統的先驗知識,例如數學模型和專家經驗,該技術以采集到的不同來源和不同類型的監測數據作為基底,利用各種數據挖掘技術獲取其中隱含的有用信息,表征系統運行的正常模式和故障模式,進而達到檢測與診斷的目的[6]。
1 總體方案設計
第一步,數據提取:從半物理仿真平臺中提取實驗數據;第二步,數據處理:將實驗數據分割并提取時域特征;第三步,劃分數據集:將特征數據集劃分成測試集與驗證集;第四步,得出結果:將數據集注入算法得出結果。
2 典型反作用飛輪故障模式分析
一般可以將常見的典型反作用飛輪故障模式歸納為三類,分別是卡死故障、空轉故障、力矩衰減故障。反作用飛輪三種典型故障的轉速的遙測圖像[7]分別如圖2、圖3、圖4所示。
圖2 反作用飛輪卡死故障轉速遙測曲線
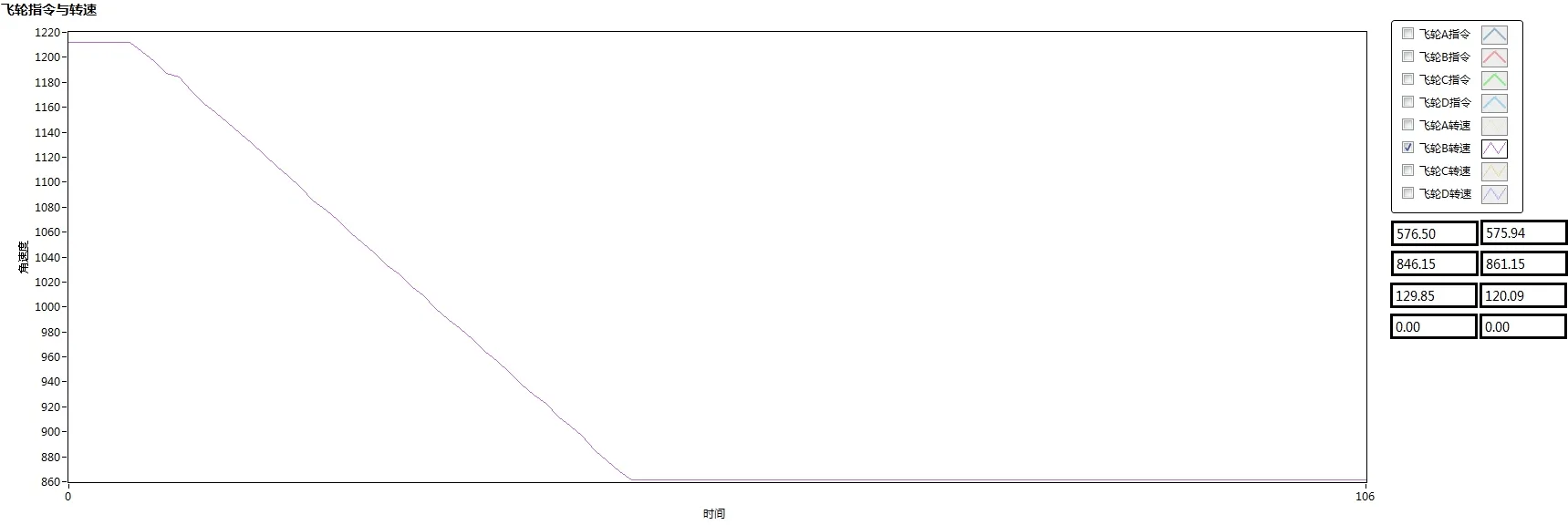
圖3 反作用飛輪空轉故障轉速遙測曲線
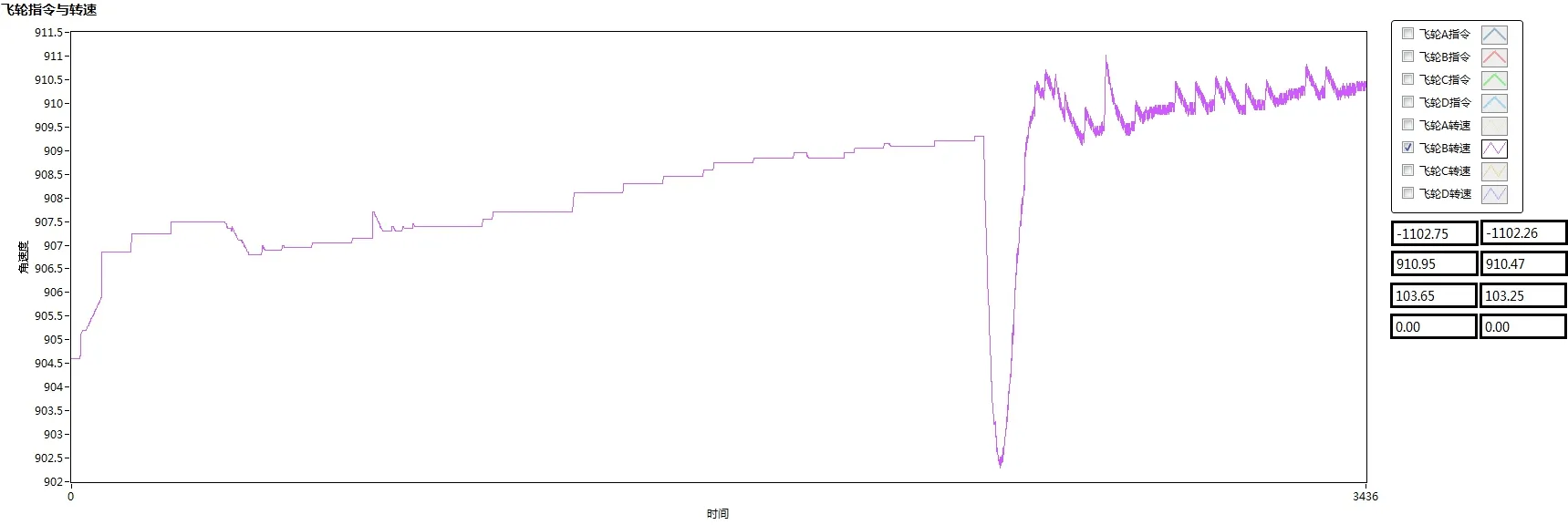
圖4 反作用飛輪力矩衰減故障轉速遙測曲線
反作用飛輪中的卡死故障、空轉故障屬于突變性故障,可以肉眼觀察出區別。但由于特征比較單一,機器很難區分。而反作用飛輪中的力矩衰減故障屬于漸變故障,不易區分[8]。
3 支持向量機反作用飛輪故障檢測方法
已知訓練集T={(x1,y1),(x2,y2),···,(xN,yN)},其中,xi是樣本輸入向量;yi是樣本輸出向量,xi∈Rn,yi∈{-1,+1},i=1,2,···,N。
選取適當的核函數,這里選取高斯徑向基核函數(gaussian radial basis function, RBF),其形式為:
將訓練樣本集映射到Hilbert 空間,得到對應的新的訓練集T={(x1,y1),...,(xl,yl)}。
選取適當的懲罰參數C,構造并求解最優問題:
式中,?是Hilbert 空間中的分類面,ξi是松弛變量,C是懲罰參數。構造Lagrange 函數,得到上述問題的對偶問題為:
得到最優解a*=(a1*,···,al*)T;選取a*的一個正分量0<aj*<C,根據此計算閾值:
構造決策函數,得到:
4 實驗結果
將從衛星半物理仿真平臺中獲得的數據集應用于提出的方法,數據集共四類:反作用飛輪卡死故障、空轉故障、力矩衰減累積故障、正常數據,每類數據提取約70 h(周期為0.25 s),將正常數據集與反作用飛輪衰減數據集在時域中劃分成平均值、標準差、偏度、峭度、最大值、最小值、峰峰值、均方根、振幅因數、波形因數、沖擊因數、裕度因數、能量13種特征,得到每類50 份數據[9]。由于反作用飛輪卡死故障與空轉故障具有特殊性,研究者往往以肉眼可分或顯而易見結束。但事實上,肉眼可分是對進化了幾千萬年的人類而言的,對機器來說沒有較好的特征輸入,任何數據集都是難以區分的。針對此問題,本文使用時域中平均值、偏度、峭度、最大值、最小值、峰峰值6 種特征作為輸入特征,并將訓練集測試集劃分成8∶2,得到結果如圖5、圖6 所示。
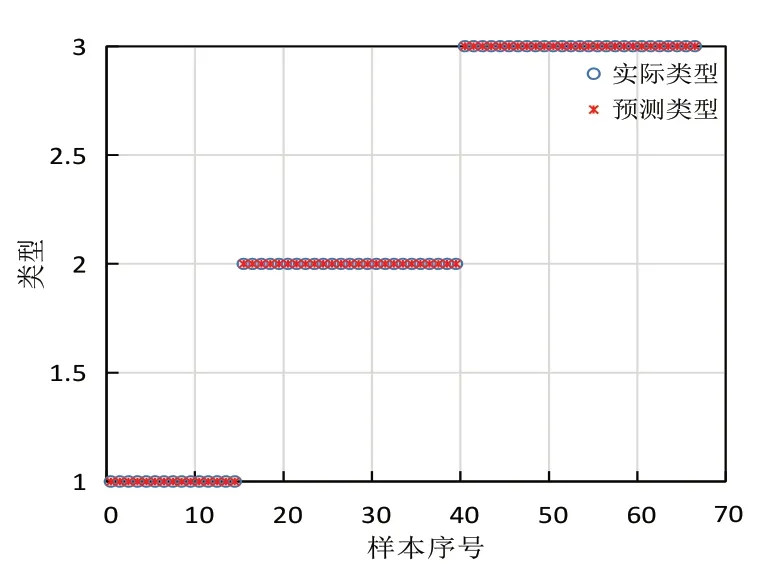
圖5 正常數據與卡死、空轉分類結果
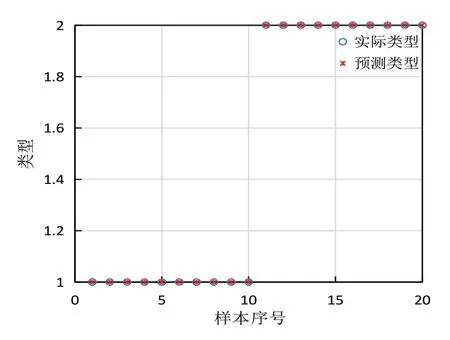
圖6 正常數據與力矩衰減分類結果
圖5 中分別是正常數據、反作用飛輪卡死故障與空轉故障的分類結果,圖6 中分別是正常數據與反作用飛輪衰減故障的分類結果,識別準確率都是100%。其中,每一種故障數據代表一種類型,即為縱坐標;訓練集每種故障數據類型使用的樣本個數共同組成樣本序號,即為橫坐標。
5 結束語
目前,衛星姿態系統的故障研究往往利用衛星的姿態信息進行判別,但衛星姿態信息只是衛星某一部件發生故障后的表現,要想得到更精準的數據,研究具體衛星部件則是必然的,本文的研究可以為衛星的故障定位問題提供一種更好的解決方案[10]。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21