智能機器人操作系統研究綜述
2023-07-23 01:37:58侯人鸞佟琨韓冰于曉龍楊帆
杭州科技 2023年3期
侯人鸞,佟琨,韓冰,2,3,于曉龍,楊帆
(1.北京航空航天大學杭州創新研究院,杭州 310051;2.浙江大學流體動力基礎件與機電系統全國重點實驗室,機械工程學院,杭州 310027;3.浙江大學,工程師學院,杭州 310015)
0 引言
機器人被譽為“制造業皇冠頂端的明珠”,其研發、制造、應用是衡量一個國家科技創新和高端制造業水平的重要標志[1]。當前以機器人、人工智能、5G和數字孿生等先進技術為代表的第四次工業革命正在興起[2],在加速實體經濟和數字經濟深度融合發展、傳統制造行業轉型升級的同時,也給中國制造業實現跨越式發展帶來前所未有之機遇。《國際機器人聯合會(IFR)報告》指出:全球機器人儲備總量已達301.5 萬臺,機器人產業快速發展。在此背景下,我國機器人產業規模擴展顯著,營業收入突破1000 億元/年,年均復合增長率達到15%[3,4],在除汽車制造、3C 等傳統行業外的物流倉儲[5]、教育娛樂[6]、醫療康復等行業也正在實現規模化應用[7],不但有力提高了生產水平、生活質量和經濟發展動力,而且正在重塑我國經濟發展的底層邏輯,成為我國新一輪經濟增長的核心驅動力,也是我國抓住“百年未有之大變局”機遇的關鍵抓手。然而,目前復雜多變的世界格局,也給我國機器人產業的發展帶來潛在挑戰,特別是給機器人的“大腦”——操作系統以及其融合人工智能、5G等技術衍生的云邊端一體化機器人操作系統,帶來了潛在的“卡脖子”風險。為此,發展我國自主可控的云邊端一體化工業機器人操作系統勢在必行。縱觀國內外機器人技術與產業發展現狀,國外起步較早、積累較厚,國內迎頭趕上、勢頭強勁,具體體現在以下幾個方面。
1 國外機器人操作系統技術與產業發展現狀
1.1 商用工業機器人操作系統
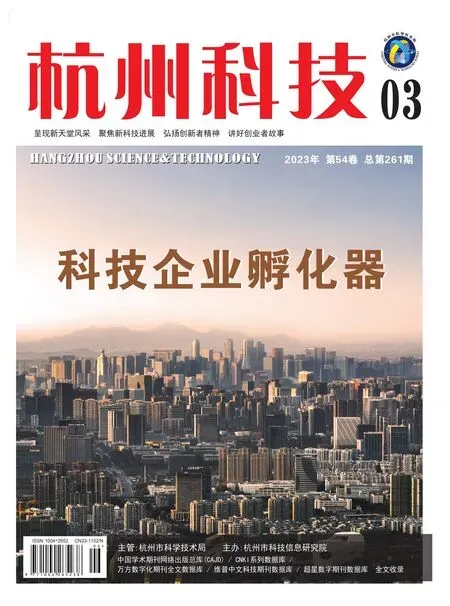
機器人作為國家高端制造水平體現的代表物,對于其操作系統的研發引起了世界工業強國和有影響力的機器人公司的重要關注,如表1 所示為國外機器人操作系統的典型產品。例如,日本2002 年就在國家戰略層面規劃了機器人操作系統并形成了OpenRTM-aist 平臺[8],其他國家組織也相繼推出了Orocos(歐洲)[9]、Player/Stage(美國)[10]、RoBoDK(加拿大)[11]、YARP(微軟)[12]等一系列操作系統平臺。同時全球各大機器人廠商包括德國的KUKA(2017 年已被中國美的集團收購)、瑞士的ABB、日本的FANUC(發那科)和YASKAWA(安川)都研發了專用機器人操作系統:KUKA和ABB采用VxWorks+自研運動控制算法,而發那科和安川則采用自研嵌入式操作系統和自研運動控制算法。經過數十年發展演進,目前國外四大家族的機器人操作系統都已經相當成熟,在穩定性、實時性和運動控制精度方面優于我國的工業機器人操作系統,但也存在各自為政、互不兼容的局面。
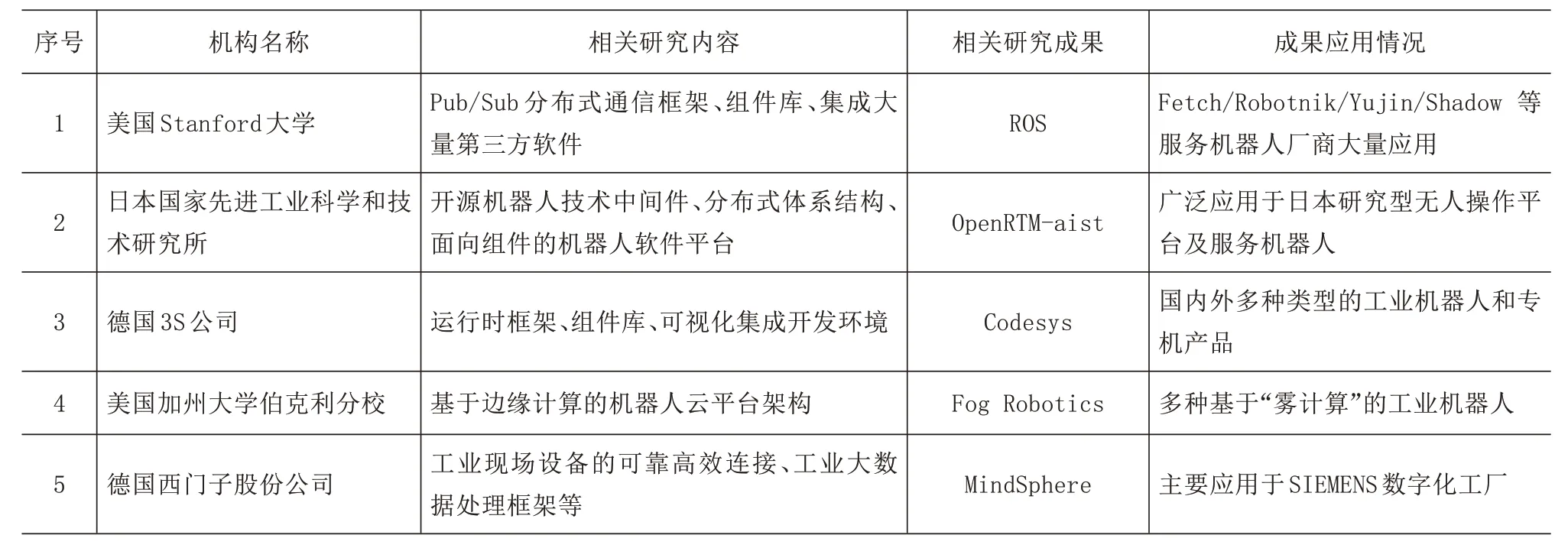
表1 國外機器人操作系統相關技術/產品
1.2 開源機器人操作系統
國外一些機構也推出了一些有影響力的開源機器人操作系統。例如,美國斯坦福大學人工智能實驗室推出的ROS(Robot Operating System)[13-15]是一款利用分布式通信機制實現節點間進程通信的松耦合框架,可對各類機器人中間件、功能庫和頂層的第三方工具軟件,如GAZEBO[16,17]、OpenCV[18]、PCL(Point Cloud Library)[19]、MoveIt[20,21]等集成至ROS 框架當中。ROS 各類機器人中間件均為開源軟件,利于研究人員學習,且用戶眾多,在全球范圍內的開發者估計超過10 萬(資深開發者3 萬左右),但開源軟件學習難度普遍較高,終端用戶難以學習掌握。另外,ROS 是運行在Linux/Windows 上的亞機器人操作系統,不能獨立運行,雖然開源但實時性差,因此ROS主要用于教學和科研,在工業界應用較少(但隨著ROSIndustrial[22,23]軟件包的出現,ROS在實時性要求不高的移動/服務機器人領域的應用逐漸增多)。
1.3 云平臺系統
為了拓展工業機器人基于工業互聯網平臺上的應用,國外商業公司及組織在工業互聯網架構、工業網絡技術等方面對已有技術進行了升級改造,并且提出了適用于機器人大數據分析的云端平臺。美國GE 推出云平臺Predix[24],主要支持工業設備安全監控、工業數據管理、工業數據分析以及云智能技術遷移等功能,其數據采集軟件嵌入工業控制系統或網絡,可在網關、控制器、傳感器節點進行部署,Predix 分析服務開發框架為基于微軟Cloud Foundry 框架的PaaS 開發平臺[25],企業根據需求可自主開發算法和模型。德國西門子推出基于云的開放式物聯網操作系統MindSphere[26],主要依托Nano 網關型硬件產品實現即插即用,提供云端連接數據采集/開發API與西門子的眾多硬件產品進行以太網通訊,但其僅支持西門子S7 通訊協議或OPC UA 協議[27]。隨后瑞士ABB提出ABB Ability 工業云可視為“邊緣計算+云”體系架構[28],分別由端設備與傳感器、DCS+電控+安全一體化的中間層自動化系統、端到端工業數字化解決方案以及開放工業云平臺四部分組成。菲尼克斯電氣推出的ProfiCloud 工業云平臺[29]采用云耦合器通過Profinet 網絡添加多個設備,并采用分布式控制器遠程控制PROFINET IO 子站[30],菲尼克斯電氣開放式控制平臺PLCnext[31],可支持各類工具軟件如Visual Studio、Eclipse、Matlab Simulink、PC Worx等并行工作[32,33],共享數據信息資源。除商業公司外,美國加州大學伯克利分校提出了基于“霧計算”的機器人云平臺架構[34-36],用以支持工業大數據處理和智能服務,相比以上商用工業平臺而言其功能較為有限,但商用私有云平臺大多僅支持某類總線、設備適配也存在一定局限性。
2 國內機器人操作系統技術與產業發展現狀
近年來,國內科研機構和企業也加速了國產機器人操作系統的研發進程[37],加強了機器人操作系統、工藝優化、預測性維護等核心技術攻關[38],推進了人工智能、5G、大數據、云計算等新技術與機器人技術的融合應用[39],相關研究如表2所示。在工業機器人操作系統領域,北航自主研發了國產機器人操作系統ROSC[40],具有開放式、跨平臺、強實時和組件化等特點。翼輝公司擁有完整自主知識產權內核的SylixOS實時操作系統,支持對稱多處理器(SMP)平臺,并且具有實時進程及動態加載機制,支持ARM、MIPS、PowerPC、X86、SPARC、DSP、RISC-V、C-SKY、LoongArch 等架構處理器,便于系統開發與調試,加快軟件研發速度[41]。錢江機器人公司推出了具有核心知識產權的QJR系列工業機器人操作系統,提供了高性能運動控制接口[42]。新時達公司以運動控制技術為核心,基于多軸同步、總線控制、平臺化控制、多機協同、免調試自適應等自有核心技術,提供包括從伺服驅動、運動控制到集成化的應用,從單機自動化到智能制造的多層次解決方案[43]。極智嘉公司提出了基于5G 和云-邊-端協同計算的移動機器人操作系統,提高機器人智能性的同時降低硬件成本[44]。
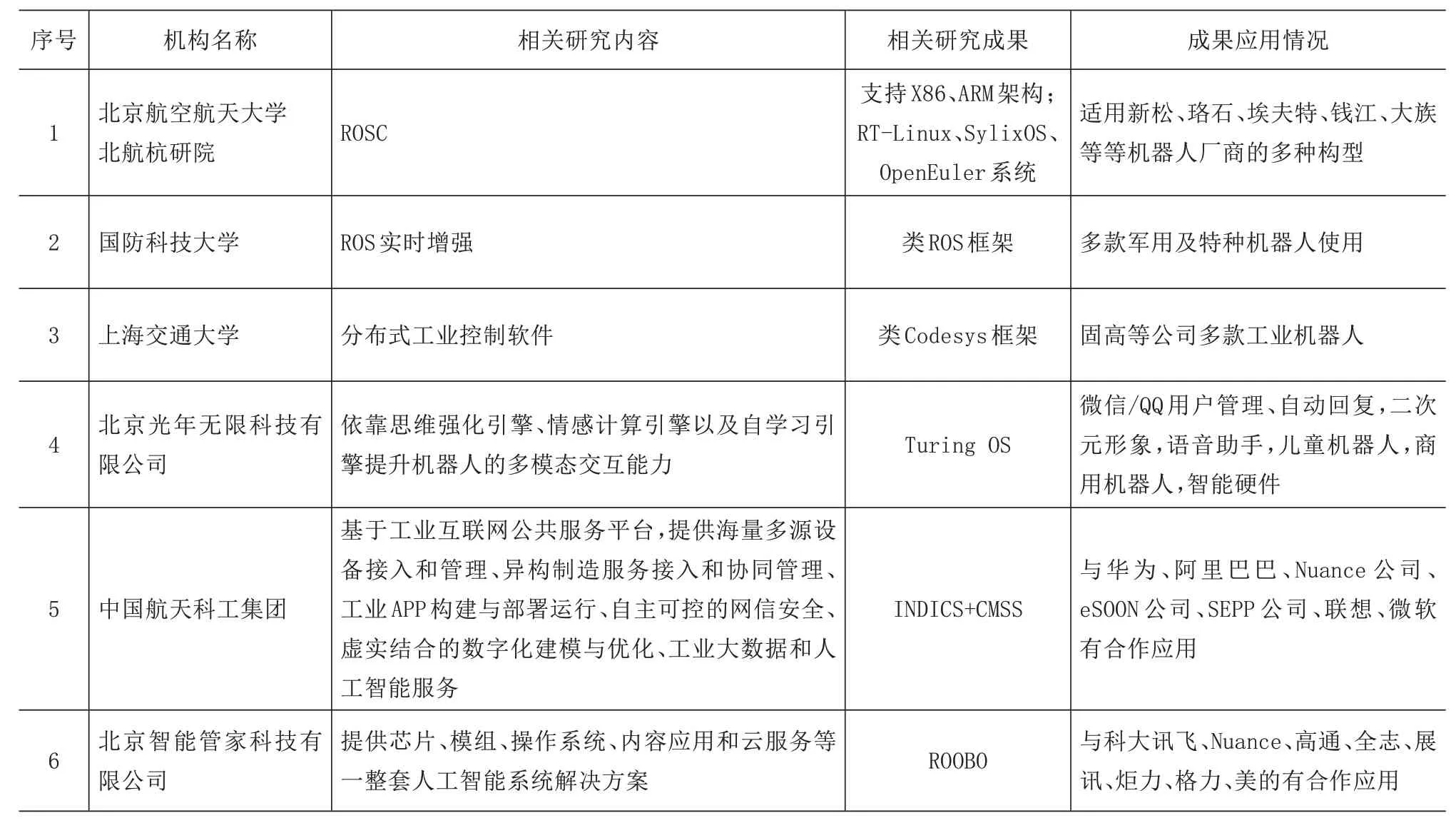
表2 國內機器人操作系統相關技術/產品
在拓展工業機器人基于互聯網平臺上的應用方面,我國工業互聯網產業聯盟(AII)發布了工業互聯網體系架構,以工業機器人、數控機床等核心裝備為支撐提出了“三層級四環節”的工業互聯網邏輯架構[45]。航天科工發布的工業互聯網云平臺INDICS 提供涵蓋IaaS、DaaS、PaaS 和SaaS 的完整工業互聯網服務功能,典型應用包括工業智能生產線,可由布置在商密網服務器上總控系統導入MES系統的任務信息,執行加工工藝的同時基于采集數據優化工藝流程[46]。海爾COSMOPlat 工業互聯網平臺依托RFID 物聯網技術可執行大規模定制化服務,主要應用在智慧服裝定制領域[47]。三一集團的樹根工業互聯網平臺為設備廠商增加遠程控制、個性化的參數設置等功能,并根據大數據信息,為設備運維提供指導幫助,具體包括遠程診斷、在線故障處理等服務[48]。用友集團的精智工業互聯網平臺是基于用友云面向工業企業的智能云平臺,平臺以基礎技術支撐平臺、容器云平臺、工業物聯網平臺、應用開發平臺、移動平臺、云集成平臺、服務治理平臺以及DevOps 平臺為支撐,融合了移動互聯網、云計算、大數據、物聯網、人工智能、區塊鏈等現代信息網絡技術[49]。浪潮M81 工業互聯網平臺采用雙模IT 架構,實現海量異構工業數據集成,提供開放API、SDK,與開發者共享平臺資源[50]。杭州阿里集團基于阿里云大數據一體化計算平臺發布ET 工業大腦,主要特點在于支持云和端一體化,在云上提供海量數據挖掘分析,并實現復雜算法模型訓練,訓練好的智能服務能夠以輕量級模式在本地工業端部署運行,為樹根互聯、海爾集團、航天科工集團分別推出了平臺解決方案[51]。國內工業互聯網云平臺與國外平臺一樣存在僅支持固定網絡接入協議,尚未形成云邊端一體化工業機器人系統平臺。
此外,國內機器人操作系統和云端應用研究的另一個明顯趨勢是對服務類機器人的技術創新和產業應用[52],如北京光年無限科技有限公司的圖靈機器人操作系統TuringOS[53]、小I 機器人云操作系統iBotOS[54]、智能機器人操作系統Roobo等,但是這些系統都存在難以兼容復雜工業應用的問題。國內知名的工業機器人公司,如新松、埃夫特、埃斯頓、匯川、華中數控、珞石等,目前主流采用“風河/RT-Linux、WinCE[55]、QNX 或RTEMS+自主研發專用機器人中間件”作為自己機器人研發平臺,但也是各自為政,彼此互不兼容,云邊端協同的工業機器人智能云服務目前還處于概念階段。
3 機器人操作系統發展趨勢
以PC Windows 和智能手機操作系統發展歷史為鑒,就全球機器人行業來說,迫切需要一個或幾個基于云邊端協同的開放式機器人操作系統的一體化開發平臺,而這個平臺核心就是“開放式、強實時多核計算機操作系統內核+分布式通信機制+云邊端協同智能服務+一體化集成開發環境”。該平臺能夠在很大程度上解決目前機器人研發面臨的學習和開發難度大、代碼可重用性差、無法跨平臺、缺少云端應用等問題,提升開發質量、開發效率和開發一致性,降低開發門檻、開發周期和開發成本。鑒于此,下一代機器人操作系統發展趨勢表現在以下四個方面:
3.1 高可靠、開放式、強實時內核計算機操作系統
VxWorks[56]、QNX[57]和RT-Linux[58]都是采用單晶內核設計,存在內核規模大、配置關系復雜和占用資源多等問題[59]。而微內核設計把功能模塊作為用戶進程運行,操作系統內核縮減到最小,具備占用資源少、實時性強、可靠性高等優勢。
3.2 分布式通信與松耦合協作
隨著機器人系統網絡化和智能化發展,消息通信的實時性成為機器人操作系統的關鍵指標[60]。以數據為中心的“發布/訂閱”通信機制已應用于ROS[61],但其缺乏對實時性的支持[62-64]。近年來,國內在面向分布式實時通信領域,北航、國防科大等單位在機器人操作系統實時性改進方面做了大量工作[65、66]。
3.3 云邊端無感協同的智能服務
工業生產過程中機器人高頻數據采集,往往會給網絡傳輸、平臺存儲與計算處理等方面帶來性能和成本上的巨大壓力,在邊緣層進行數據的預處理和緩存,在云端進行智能化的工藝應用優化和預測性維護[67-69],是未來機器人企業在云邊端協同上需要突破的瓶頸[70-72]。
3.4 標準化機器人功能組件與集成開發環境
針對傳統機器人功能組件封閉不開放、難以優化和重用的痛點,機器人廠商提供了多種應對策略,但仍然存在工業現場人員學習使用難度大、模塊抽象擴展困難的問題[73,74],需要提高機器人操作系統組件標準化和跨平臺程度,迫切需要建立一體化機器人集成開發平臺[75,76]。