基于Simulink 的某橋式吊車系統運動學分析及參數化討論
2023-07-26 10:11:38劉麗萍袁麗蕓雷海霞
裝備制造技術 2023年5期
劉麗萍,袁麗蕓,雷海霞
(1.廣西科技大學 機械與汽車工程學院,廣西 柳州545006 ;2.廣西汽車零部件與整車技術重點實驗室,廣西 柳州 545006)
0 引言
橋式吊車作為一種典型的欠驅動系統,在實際工程中應用極其廣泛。國內起重機吊車運行控制大多依賴有經驗的操作人員人工操作,無法絕對保證操作得當,且效率低下。此外,在吊車運動過程中負載擺動不僅會對吊車系統工作效率有一定的影響,還存在與周圍的操作人員發生碰撞所引起的安全隱患。因此,橋式吊車系統工作過程中負載擺角的抑制也引起了廣泛關注。部分學者對橋式吊車系統消擺策略進行了研究[1]。其中,將負載和吊鉤視為一整體系統,用單擺模型描述橋式吊車系統的運動規律,從而對該類系統進行控制策略的研究與仿真分析是一種最常見簡單實用的方式[2]。基于此模型,研究人員提出了負載擺動的抑制方法,主要有最優控制[3]、軌跡規劃[4]等基于吊車線性化模型的方法;狀態耦合增強[5]、滑模控制[6]等非線性控制方法;模糊控制[7]、神經網絡自適應控制[8]等智能控制方法。但是上述文獻均未見對繩長給系統帶來的影響有深入探討。
因此,本文擬采用單擺模型,結合Simulink 對吊車工作過程進行數值模擬,比較了三種常用加速度輸入信號作為臺車規劃軌跡時的優劣,從而確定最優參考軌跡。并在不同繩長下,通過加(減)速時間、運行總時間、擺角等參數的對比,深入探討繩長變化給單擺模型中臺車和負載運動帶來的影響。
1 問題描述
橋式吊車單擺系統模型如圖1 所示,其動態特性可用以下方程組描述[9]:
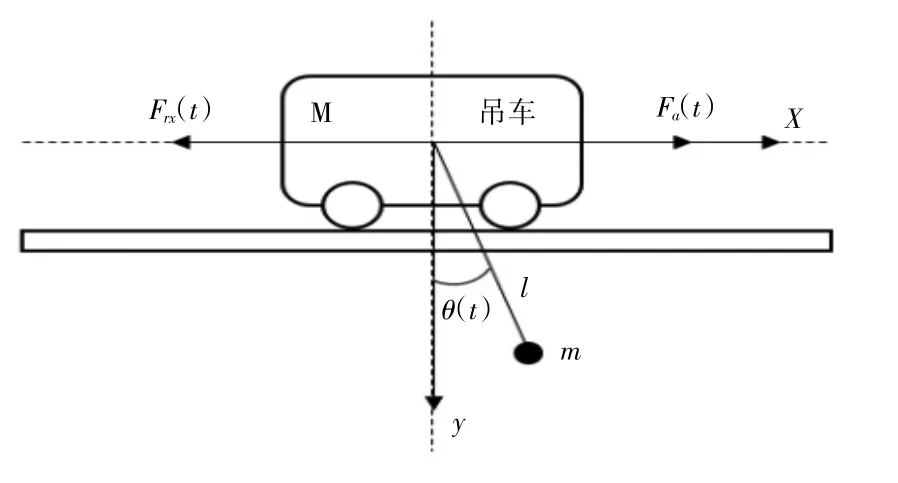
圖1 橋式吊車單擺系統示意圖
式中,M為臺車質量,m為負載質量,l為吊繩的長度,g表示重力加速度,x和θ分別表示臺車位移和負載相對于豎直方向的擺角,為擺角速度和分別為其相應加速度,F表示作用于臺車上的合力,即驅動力Fa(t)和阻力Frx(t)的合力。式(1)表達系統的臺車驅動方程,式(2)表達負載無驅動方程,橋式吊車單擺系統由二者耦合而成。當臺車加速度恒定時,可得擺角為[9]:
由(3)式不難得到驅動系統在臺車三段式運動時系統的固有頻率ωn和周期以及臺車運動軌跡的加(減)速時間、勻速時間、運行總時間,具體數據參見文獻[9]。
2 基于Simulink 的單擺橋式吊車系統運動學模型仿真
由式(2)出發,忽略摩擦力的影響,選取臺車的加速度作為可實時調控的輸入參數,對其進行二次積分可得臺車的臺車的規劃軌跡和負載擺動的角加速度、角速度和擺角。由此建立系統擺角的Simulink 仿真模型如圖2 所示。
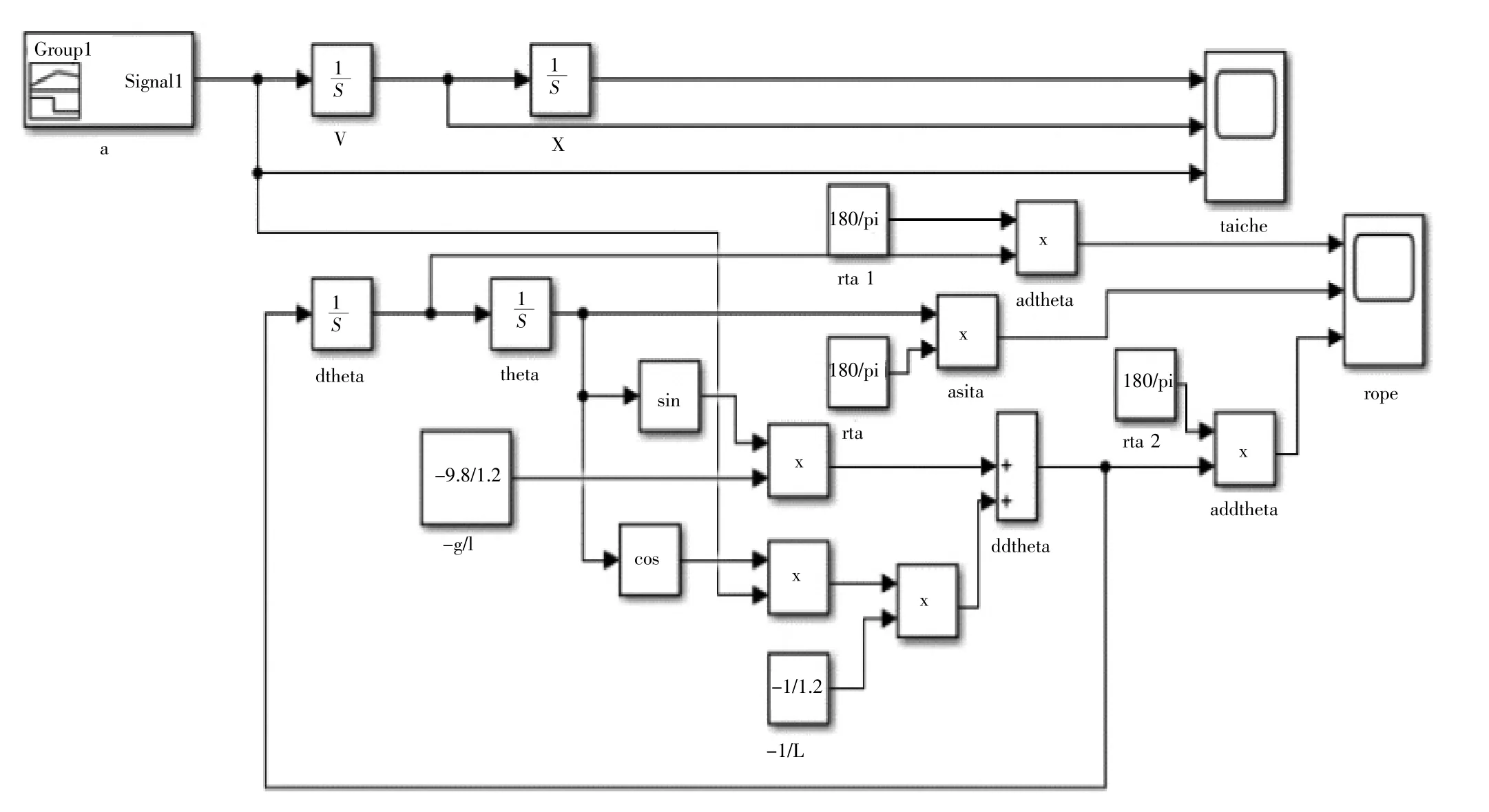
圖2 基于Simulink 的橋式吊車單擺系統仿真模型圖
為了驗證圖2 給出的仿真模型的正確性,文獻[9]給出的具體算例,取g= 9.8 m/s2,臺車的目標位置、最大速度和加速分別為Pdx= 4 m、υub= 1.0 m/s、aub=0.5 m/s2,繩子最大擺角θub= 5°,l= 1.2 m。臺車加速度選取三段式矩形信號輸入,通過Simulink 仿真,可得到臺車運動位移、運動加速度和負載擺角如圖3所示,圖中帶三角符號為根據文獻[9]給出的解析表達式給出的值,點直線為根據本文Simulink 仿真所得結果。
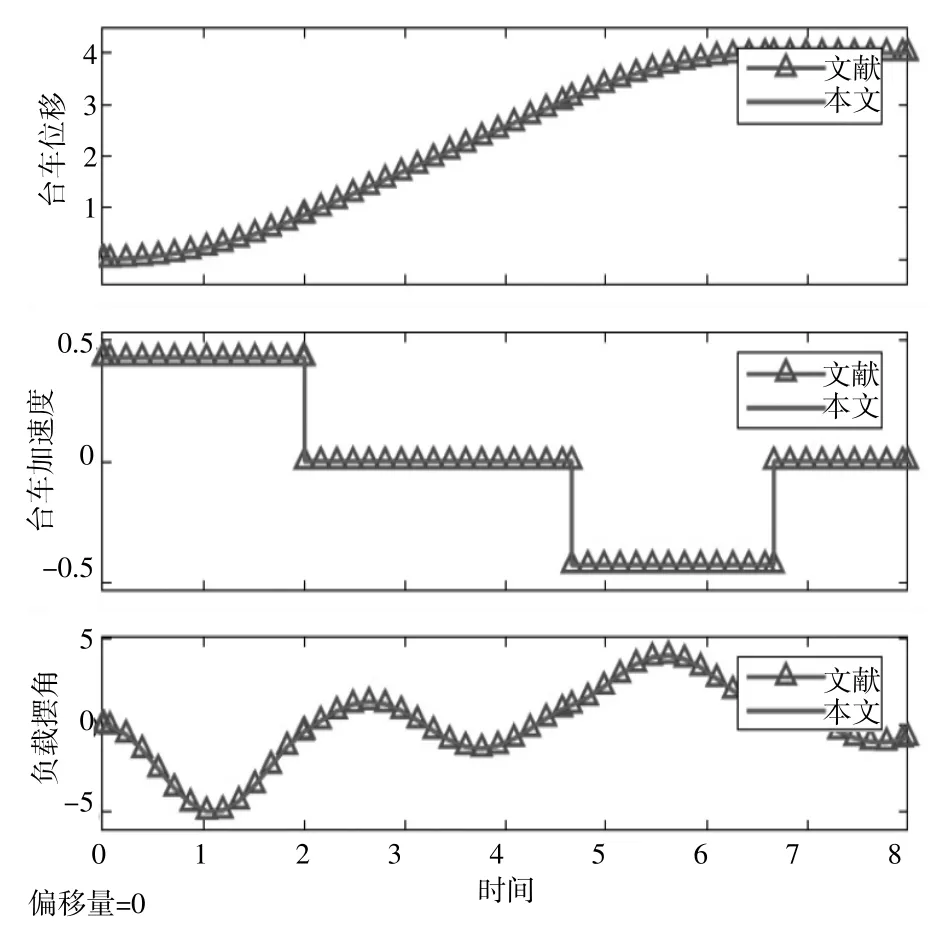
圖3 三段式臺車軌跡示意圖
由圖3 知,采用simulink 仿真模型所得臺車的運動規律符合文獻[9]給出的理論解。此外,負載的擺動角度在正負值間來回振蕩,且隨著時間增加,趨勢并沒有明顯的減弱傾向,表明負載難于消擺。
3 參數化討論與仿真分析
3.1 模型驗證
根據文獻[9]的基于相平面幾何分析的軌跡規劃方法可知,三種不同參考加速度軌跡作為臺車輸入參對系統狀態有一定影響。采用Simulink 對其進一步分析對比,結果如圖4 所示,第三種參考軌跡最優。
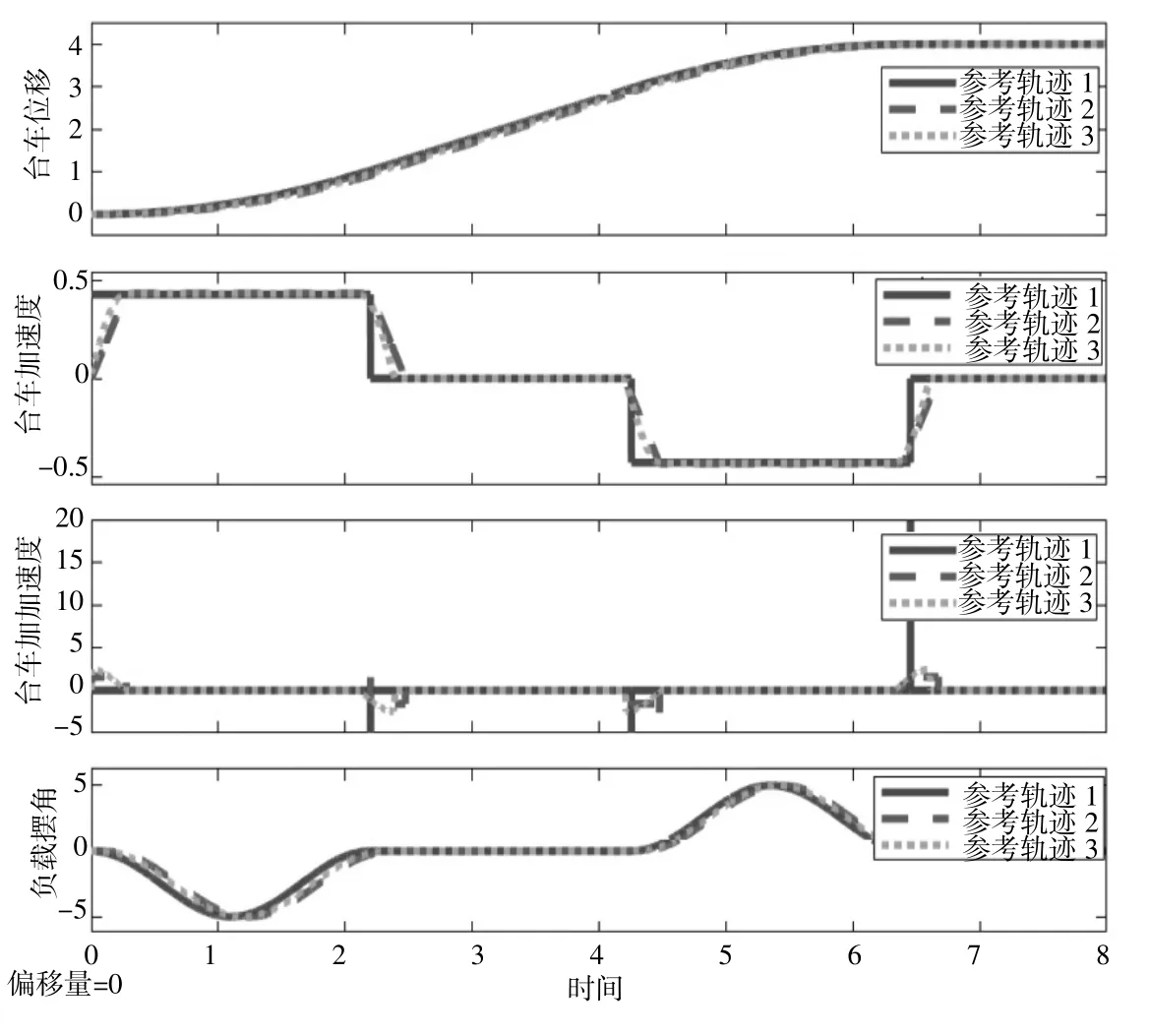
圖4 三種加速度規劃軌跡下系統運動狀態示意圖
3.2 參數討論
為了進一步探討繩長變化對吊車系統輸出狀態的影響,采用文獻[9]軌跡進行仿真,結果如圖5 所示。由圖5 可知,隨著繩長增加,臺車軌跡規劃的最大加速度呈非線性減小的趨勢,臺車運動到目標位置所需加速時間及總時間均呈非線性增大,系統固有頻率呈非線性減小。說明繩子越長,抑制擺動所花的時間成本越高,且系統抗干擾能力越差,較小頻率的擾動極其容易讓系統失穩。
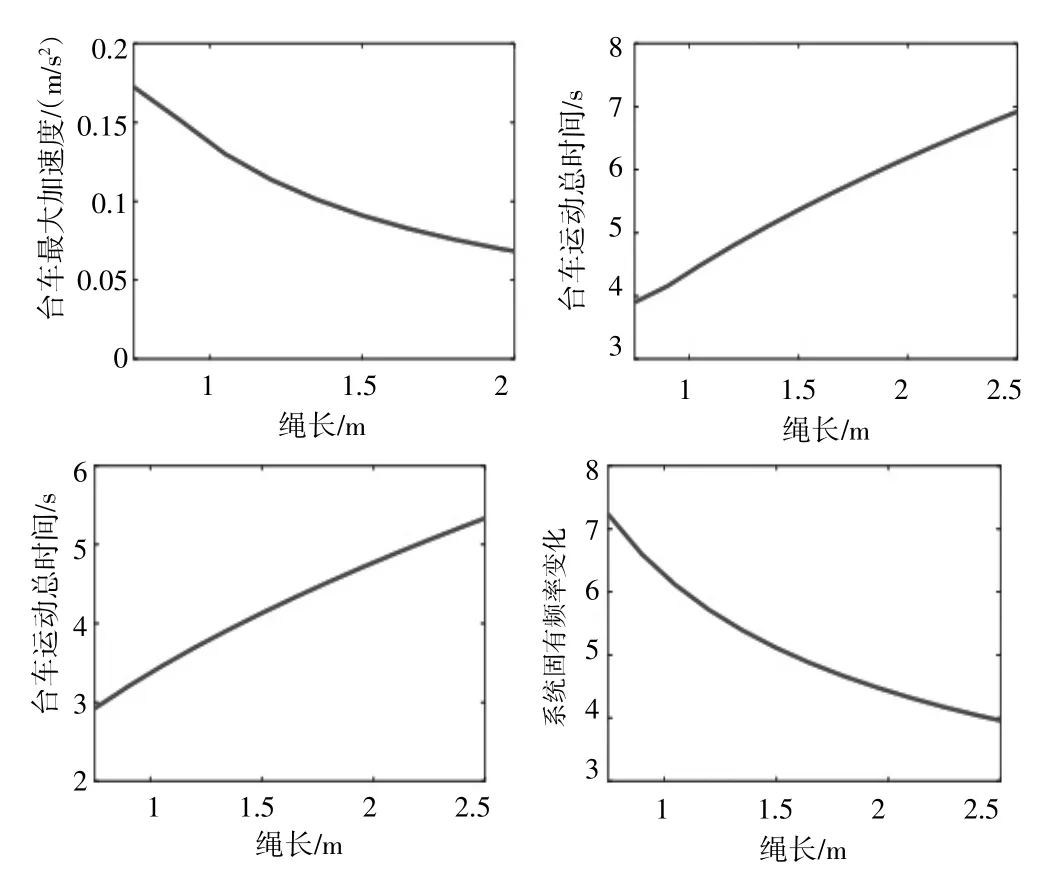
圖5 臺車運動軌跡控制參數隨繩長變化曲線
為了進一步對得到繩長變化下的系統狀態,選取四組繩長數據進行仿真比對,結果如圖6 所示。從圖中可以看出,小車運動軌跡區別不大,但繩子越長,擺角震蕩越厲害。并且停止輸入加速度信號后,負載的殘擺沒有明顯減弱的趨勢,說明基于參考軌跡的控制消擺策略在繩子較長時效果有待提高。
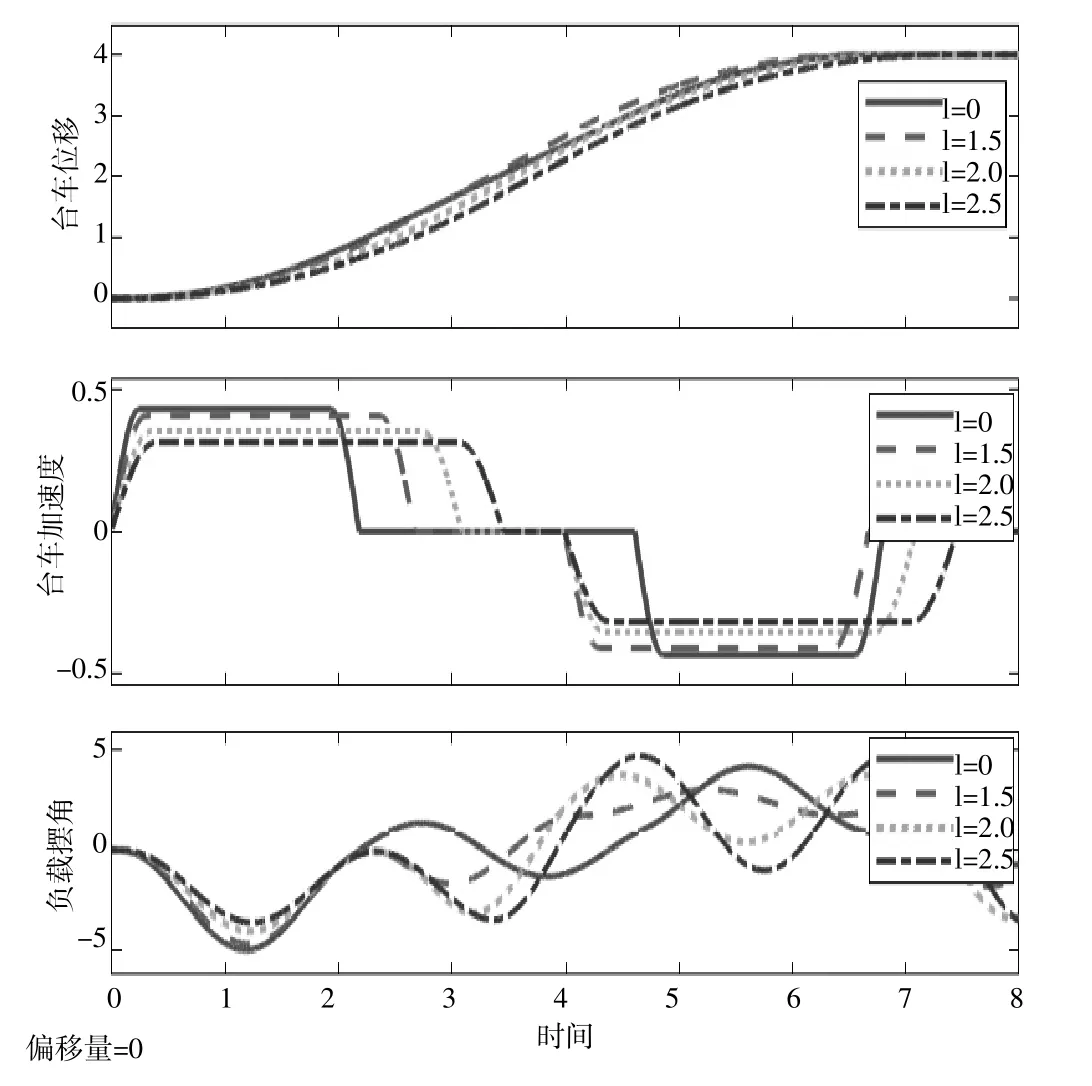
圖6 四種不同繩長下臺車和負載擺動軌跡對比
4 結語
根據負載與臺車之間的單擺模型給出的耦合關系,結合MATLAB 中的Simulink 建立了單擺吊車系統仿真模型,并對其運動進行了仿真分析,探討了繩長變化對臺車軌跡規劃參數和負載擺動抑制的影響。結果表明,吊繩越長,臺車運行時間成本也越大,負載的殘余擺動也越難得以抑制,當吊繩較長時,采用該單擺模型對負載擺動進行抑制,控制器的設計難度較大,需要考慮更為精確的系統模型進行設計。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19