
基于無人機點云數據的河流DEM創建研究
2023-08-01 18:01:11劉欣
科技資訊 2023年12期
關鍵詞:無人機
劉欣

摘要:河流地區的地理空間信息對于河流管理(如河流規劃,洪水分析和泥沙負荷分析)至關重要。無人機(Unmanned?Aerial?Vehicle,UAV)技術已廣泛應用于獲取三維地形,其直接獲取的是數字表面模型(Digital?Surface?Model,DSM),包括地表植被、建(構)筑物等地物的高程信息。該文以北京市內某河流為工程背景,使用區域增長算法,基于無人機獲取的點云數據提取地面點,創建區域數字高程模型(Digital?Elevation?Model,DEM),并使用虛擬參考站(Virtual?Reference?Station,VRS)和全站儀量測檢測點坐標,檢驗所獲取DEM的精度,驗證基于無人機點云數據創建DEM的有效性。因此,可以通過應用基于區域增長算法的無人機點云來生成DEM,并將其有效地用于河流管理中。
關鍵詞:無人機??點云??區域增長法??河流地形數據
中圖分類號:P332;P23??文獻標識碼:A
Research?on?the?Creation?of?the?River?DEM?Based?on?UAV?Point?Cloud?Data
LIU?Xin
(AVIC?Institute?of?Geotechical?Engineering?Co.,?Ltd.,?Beijing,?440001?China)
Abstract:?The?geospatial?information?of?river?areas?is?critical?for?river?management?(such?as?river?planning,?flood?analysis?and?sediment?load?analysis).?Unmanned?aerial?vehicle?(UAV)?technology?has?been?widely?used?to?obtain?3D?terrain,?and?it?directs?acquires?the?digital?surface?model?(DSM),?including?the?elevation?information?of?ground?objects,?such?as?surface?vegetation,?buildings?(structures),?etc.?This?paper?takes?a?river?in?Beijing?as?the?engineering?background,?uses?the?regional?growth?algorithm?to?extract?ground?points?from?the?point?cloud?data?obtained?by?UAV?and?create?the?digital?elevation?model?(DEM),?and?uses?the?virtual?reference?station?(VRS)?and?total?station?to?measure?the?coordinates?of?detection?points,?test?the?accuracy?of?the?obtained?DEM,?and?verify?the?effectiveness?of?creating?the?DEM?based?on?UAV?point?cloud?data.?Therefore,?the?DEM?can?be?generated?by?applying?UAV?point?clouds?based?on?the?regional?growth?algorithm,?and?it?will?be?effectively?used?in?river?management.
Key?Words:?UAV;?Point?cloud;?Region?growing?method;?River?terrain?data
河流周圍地區的4D產品對于河流的綜合管理至關重要,可以用于限制河流環境內的過度開發和執行災害管理任務[1]。很多研究一直在利用地形數據進行河流管理任務,如用于制訂基本的河流維護計劃、水利設施安裝、洪水分析和泥沙排放分析等[2]。
與傳統測圖方法相比,無人機攝影測量可獲取地表地物4D產品,獲取的信息更全面。近年來,基于無人機(Unmanned?Aerial?Vehicle,UAV)創建三維地形數據得到了廣泛應用。無人機配備有全球衛星導航系統(Global?Navigation?Satellite?System,GNSS)和慣性導航系統(Inertial?Navigation?System,INS),用于獲取位置信息的傳感器以及用于捕獲影像的攝像頭。此外,一些項目中已經使用了能夠進行虛擬參考站(Virtual?Reference?Station,VRS)調查的無人機設備,從而可以更快地進行地形建模[3]。
基于無人機獲取三維地形的研究大多都集中在應急防災、城市規劃、林業和農業上,這些應用中獲取的地形數據為包括所有地形特征的數字表面模型(DigitalSurface?Model,DSM)影像。用于基本河流維護計劃開發、洪水建模和沉積物流量分析要使用數字高程模型(Digital?Elevation?Model,DEM)數據,需要從無人機采集的DSM數據中消除植被等地物特征[4]。
基于無人機點云數據獲取DSM,應用區域增長法創建DEM,選擇位于北京市某河流的一部分作為試驗區域,基于地面實測數據評估DSM和DEM數據的高程精度,驗證了基于無人機點云數據創建DEM的可靠性。
1點云數據獲取
試驗區域為北京的某條河流,選擇eBee(SenseFly,瑞士洛桑)作為獲取河流地形數據的無人機設備,該設備單次飛行的最大飛行時間為50?min,最大覆蓋范圍約為12?km2,搭載WX220(索尼)相機,焦距為4~25?mm[5]。
路線規劃采用eMotion軟件設計。無人機飛行高度195?m(分辨率為6?cm),橫向和縱向重疊分別設置為70%和85%。一次飛行可以捕獲大約1?km2的區域。
總共獲取了目標區域的391張圖像。使用eMotion軟件包的“飛行數據管理器”功能進行地理標簽處理,將位置信息(例如GNSS和INS信息)與每個圖像文件相關聯,使用Pix4D軟件進行圖像鑲嵌處理。
2?DSM創建
基于Pix4D軟件。可以使用“rayCloud”技術來提高圖像中的三維點云數據以及GPS和INS信息的準確性,該技術最終可創建具有高可靠性的DSM數據[6],如圖1所示。具體流程如下。
(1)輸入立體像對。將垂直獲得的影像作為左視圖,非垂直方向獲得的影像作為右視圖,同時輸入影像的RPC文件。
(2)定義地面控制點。Pix4D提供了無控制點、交互式選擇控制點及從外部文件中讀取控制點3種選擇。本文中選擇無控制點,生成相對高程的DSM。
(3)定義連接點。基于區域灰度匹配法自動尋找重疊區的連接點;設置連接點數目、搜索窗口大小、移動窗口大小;通過交互式窗口檢查連接點效果并調整參數,直到取得滿意的效果。
(4)設定輸出參數。設定輸出DSM的投影參數、像元大小和范圍、最小相關系數閾值、背景值、數據輸出類型等。
(5)輸出DSM及檢查結果。將產生的DSM顯示在窗口中,并激活編輯工具。
(6)編輯DSM。對生成的DSM進行中值濾波處理,設定3×3的卷積核。同時對結果進行人工檢查,消除明顯的異常值。
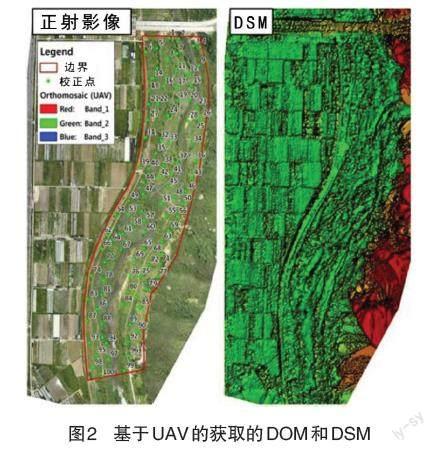
圖2顯示了由Pix4D軟件創建的數字正射(Digital?Orthophoto?Map,DOM)影像和DSM影像。作為參考,在DOM中還顯示了用于評估河流地形數據準確性的邊界點和驗證點。
3?DEM創建
由于使用無人機創建的DSM數據包括河流中的植被,河流調查需要使用剔除植被等地物后生成的DEM數據。圖3顯示了河流一部分的三維模型,該模型是使用DSM創建的。
傳統的點云數據處理方法大都采用局部最大值方法提取樹木或建筑物[7]。該方法需要事先獲取與目標樹木或建筑物位于同一地面上的最大樹木或建筑物的大小,對于闊葉林較多的地區,采用局部最大值方法通常會在同一樹冠中檢測到多個局部最大值點,易降低樹冠提取的準確率。因此,選擇采用基于坡度的濾波算法來提取地面點,并使用區域增長方法來創建DEM。
基于坡度的濾波算法基本思想是:點云數據地面點和地物點之間的坡度大于地面點與周圍地面點形成的坡度值。在一定范圍內,相鄰的兩點高程差越大,兩點引起的地形變化就越大。算法的濾波精度與所給的閾值有關,而地形數據的完整性與范圍窗口有關。不同的地形數據需要使用不同的坡度值參數進行濾波計算。
區域增長是點云數據分割最常釆用的方式。在屬性空間中,面向不同的處理對象,借助高差、坡度、法向量、與原點距離、鄰域擬合曲面的殘差等特征,進行區域增長,形成一系列的目標表面;然后,在目標空間中,進行拓撲分析,對目標表面進融合、分裂和分類,最終得到模型重建所需面數據;最后,完成模型重建。為了使用點云數據對河流中的樹木進行分類,首先將這些點分為非地面點和地面點,點云數據同時顯示水平位置(x,y)和垂直位置(z)。搜索位于特定點云周圍的點后,根據各個點之間的坡度差異對地面和植被進行分類。因植被高程明顯高于地面,所以如果各點云之間的坡度較大,則表示是植被,但如果用于計算的像元面積太大,則樹可能被誤分類為地面,為了解決此問題,可基于目標區域中的樹冠面積或地形特征來設置窗口大小。
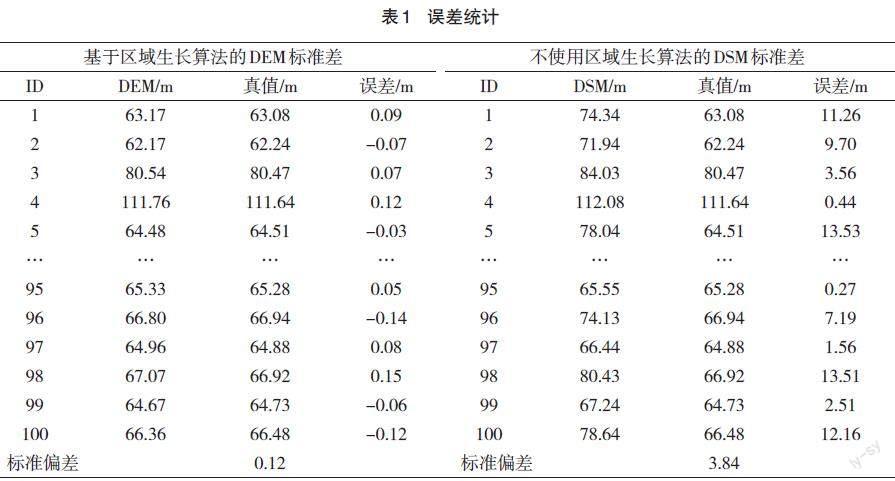
圖4(a)顯示了基于無人機的DSM影像。圖4(b)顯示了通過基于點云數據的區域增長法創建的DEM。計算了100個檢查點的高程誤差。(如表1所示),DSM的高程值的計算誤差范圍為0.08~15.33?m,標準差為±3.84?m。另一方面,評估顯示,DEM的高程誤差范圍為-0.27~0.41?m,標準差為±0.12?m。
4?結語
在該研究中,基于從無人機攝影測量獲得的點云數據,應用坡度技術創建了可用于河流管理任務的地形數據。該研究通過使用VRS和全站儀調查得出了100個測試點的真實值,并將這些測試點用于計算DSM和DEM的高程精度結果表明,DSM和DEM數據的標準差分別為±3.84?m和±0.12?m。因此,通過基于無人機點云數據的坡度技術分析的DEM數據可以有效地用作河流管理任務的地形數據,如基本河道維護計劃的建立、洪水模型和沉積物排放評估等。
參考文獻
- 程飛,張子文,姜炳功.無人機傾斜攝影測量在河流綜合治理中的應用[J].測繪與空間地理信息,2022,45(6):58-60,66.
- 鄧燁.基于無人機點云數據的道路標志提取與規則化[D].合肥:安徽理工大學,2021.
- 王明,李麗慧,廖小輝,等.基于無人機航攝的高陡/直立邊坡快速地形測量及三維數值建模方法[J].工程地質學報,2019,27(5):1000-1009.
- 劉帥,欒奎峰,譚凱,等.基于無人機LiDAR點云的多類型植被覆蓋灘涂地形濾波[J].遙感技術與應用,2021,36(6):1272-1283.
- 馬富明.無人機影像匹配點云在大比例尺DEM數據生產中的應用[J].水科學與工程技術,2022(1):61-64.
- 王龍.無人機傾斜影像密集匹配點云的處理與應用[D].貴陽:貴州師范大學,2021.
- 李濤,袁中朝,沈彪群,等.無人機影像匹配點云技術在道路測設中的應用[J].測繪通報,2018(6):156-159.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
