低空無人機三維傾斜攝影技術測繪大比例尺地形圖應用研究
2023-08-03 07:42:42張治國
甘肅科技 2023年6期
張治國
(甘肅省自然資源規劃研究院,甘肅 蘭州 730000)
1 引言
在測繪技術設備和技術方法迅速發展的時代,借助“實景三維中國”的提出并實施,低空無人機傾斜攝影測量技術也突飛猛進,被廣泛應用。傾斜攝影測量技術自動化程度較高,通過軟件匹配,人為干預較少,大大提高了三維建模效率。傾斜攝影測量技術利用多臺高分辨率相機從垂直、左傾、右傾、前傾、后傾5個方向對地表實體進行高重疊率拍攝,能快速獲取地表實體豐富的數據信息,真實準確地反映地表實體情況[1]。
文章主要結合實際工作案例,通過同一地點多次航拍采集實驗,采用外業實測數據、內業解算、采集數據進行對比計算差值,統計成果精度。論述采用此項技術進行大比例尺地形圖測繪的一般程序及誤差來源。
2 總體技術路線
采用低空無人機傾斜攝影測量技術開展測繪任務,首先應充分收集測區資料、開展現場踏勘,然后設計航線、進行航飛,利用專業軟件完成數字表面模型、數字高程模型、數字正射影像圖和實景三維模型生產,再結合實景三維成果采集任務區的地形地貌以及地物要素信息,生產制作數字線劃圖,最后整理形成大比例尺地形圖[2]。具體在大比例尺地形圖測繪工作中,使用該技術鼓勵采用更加先進技術獲取更高標準的產品。
1)分析收集資料,利用可用基礎資料和空中三角測量結算方案,制定事前外業像片控制點點位圖,并進行測量。施測按照圖根點方法進行。
2)調試無人機及三維數據采集設備,規劃航線,選擇合適天氣進行三維數據采集。
3)利用內業解算軟件,解算垂直及傾斜相片的外方位元素及其他內業解算必須數據。
4)利用內業傾斜數據處理軟件,自動匹配制作模型,自動映射紋理,生成實景真三維模型。
5)軟件輸出三維模型及OSGB數據。
6)導入原始數據、結算數據、模型等數據全數比對檢查。
7)對導入初始數據,軟件結算,數據生產等進行過程檢查,必須達到質量要求,才能進入下一工序,避免誤差積累。
8)全部檢查合格后,將模型成果數據提交數據采集部門進行下一步工序,地形圖數據采集。
3 傾斜攝影基本要求
3.1 地面分辨率
平均地面分辨率主要應根據測圖成果比例尺確定,其次還要考慮項目區地形條件,航拍無人機及航拍設備的具體性能等。
3.2 影像質量要求
拍攝相片影像要清晰,色彩要飽和,色調要一致,能辨別與地面分辨率相適應的細小地物影像。符合全數字外業調繪和內業判讀規定。避免進入云層等大面積遮擋的缺陷。
3.3 飛行平臺要求
航拍載體采用低空具有自動駕駛功能的無人機,飛行姿態能滿足作業要求。具有GNSS導航功能,后查分功能,作業時間大于30 min。
3.4 航攝儀性能要求
垂直及傾斜相片的外方位元素可準確解算,每部相機像素不得低于2 500萬像素。
3.5 航攝基準面及重疊度
1)基準面:根據成果要求、航攝區的地形起伏、飛行安全條件,盡可能選擇分區內低點平均高程為航攝基準面。
2)重疊度要求:在高差較大及建筑物密集地區,垂直影像航向重疊度應大于65%,一般應設置為70%~80%;旁向重疊度應大于40%,一般應設置為50%~70%;傾斜影像重疊度應設置為大于60%即可。
3.6 航攝分區
1)分區界線與圖廓線相一致。
2)分區內地表相對高差小于1/4設計航拍高度。
3)分區內相對高差符合要求,并滿足航拍軌跡是直線時,分區覆蓋范圍應盡量涵蓋拍攝區。
4)分區內相對高差較大,地表突變或者航拍有特殊要求時,容許打破圖廓線規定,重新設定分區航拍。
5)傾斜攝影時應根據公式進行航向與旁向外擴。具體公式如下:
N=tanθ/(2tanθ(β/2)×(1-P))
式中:N為理論超出值,單位為條;θ為傾斜相機角度,單位為度(°);β為傾斜相機視場角,單位為度(°);P為航向或旁向重疊度。
3.7 航線敷設
航線敷設應遵從以下原則:
1)航線飛行方向按照項目區內多數建筑走向設計,與建筑方向平行或垂直方向飛行,并考慮當地風向,盡量逆風飛行,避免側風作業。
2)如無人機有仿地飛行功能,相機曝光點最好按照高差起伏設定,如無人機沒有仿地飛行功能,相機曝光點最好按照航拍距離設定。
3)如項目區有大面積水域覆蓋時,航線設計應注意像主點不要落水。
4)如項目區內地表建筑物高度、密度較低時,可適當減小航拍重疊度;如地表建筑物高度、密度較高時,可適當增大航拍重疊度。
3.8 天氣選擇
航拍作業時應參考當地實時天氣預報,最好在陰天或者晴天作業,晴天應在中午太陽陰影最小的時候;雨雪天或者大霧、沙塵等能見度較低的時候禁止作業,保證航拍質量。
4 航攝實施
4.1 航攝準備
整理分析項目區基礎資料,編寫項目技術設計書,并報甲方審批。籌備適合該項目的無人機和三維傾斜數據獲取設備,按空域申請流程辦理空域使用批文,禁止黑飛作業。
4.2 像控點布設、測量
按照項目技術設計規定,相控布設一般采用事前布控。依據方案設計布設像控點位,像控點圖形應采用“L”形,大小要適當。能長時間保留的如水泥地表可用油漆噴涂,不能長時間保留的地表可用防水布打印后鋪設,要做到在空三加密刺點中點位清晰可見。像控點測量一般采用RTK方法測量較為方便,精度控制在圖根點精度即可。RTK方法測量應注意大地高與正常高之間的轉換。
4.3 航攝飛行
選擇合適的天氣,空曠的起降場地準備航拍作業。首先,安裝調試設備,做飛前檢查、機務檢查,安裝并檢查航攝儀工作是否正常,導入設計好的航線,準備起飛作業。其次,飛機起飛后,檢查飛機飛行是否正常。如飛行異常,盡快降落,查找原因。如飛行正常,切入飛機自駕模式,追蹤作業點。最后,監視地面站,查看飛機作業姿態,是否按設計航線航拍,飛機俯仰角、橫滾角是否符合航拍要求。
4.4 現場數據檢查及下載
航拍結束飛機安全降落后熄火,立即檢查機載POS與照片數量是否一致,記錄是否完整,GNSS定位數據是否失鎖;檢查照片質量,清晰度是否滿足航拍要求,是否進云或有遮擋顯現,曝光度是否符合要求等問題出現。
檢查合格后,現場下載機載POS數據、照片數據、查分定位數據,以免造成轉場數據遺失,并做好數據備份。將數據安全送至數據處理部門。
4.5 數據預處理與檢查
數據處理部門收到數據后,要將機載POS數據、照片數據、查分定位數據一一對應做預處理工作,檢查全部合格后,提交下一步工序。
4.6 全數字空中三角測量
利用檢驗合格的像片數據、查分POS數據及像控測量成果,采用實景三維建模軟件Context Capture Center進行空中三角測量。導入已知的相機參數建立空三工程,采用POS數據成果進行航帶內及航帶間影像同名點匹配,生成海量匹配點。
影像匹配完成后,進行自由網平差計算,刪除或調整超限點。精度滿足要求后,加入人工量測外業控制點,進行絕對定向光束法平差。
4.7 三維模型生產
在空三加密后,利用Context Capture Center三維建模軟件全自動生產三維模型。三維模型成果完全根據航攝獲取的影像數據制作,可以真實還原地物的空間位置、形態、顏色和紋理。模型生成后可直觀查看測區范圍內所有地物特征及建筑物細節[3]。
4.8 內業成圖
將最終三維模型成果導入EPS測圖軟件,采集地表附著物界址點、拐角點及中心點等信息,繪制地形圖,根據外業調繪資料完善屬性,形成最終成果。
4.9 成果檢查
內業數據采集完成后,要對測圖成果進行精度檢查。精度檢查采用坐標比對方式進行,即外業挑選一定數量的明顯點位進行儀器實測坐標與內業采集坐標做比對。計算X、Y、Z三個方向的偏移值,最終計算平面和高程中誤差。下表為本單位一個項目誤差統計表,從表1中可以看出,此項目平面和高程中誤差分別是0.038 m和0.043 m,符合1∶500地形圖測圖精度。
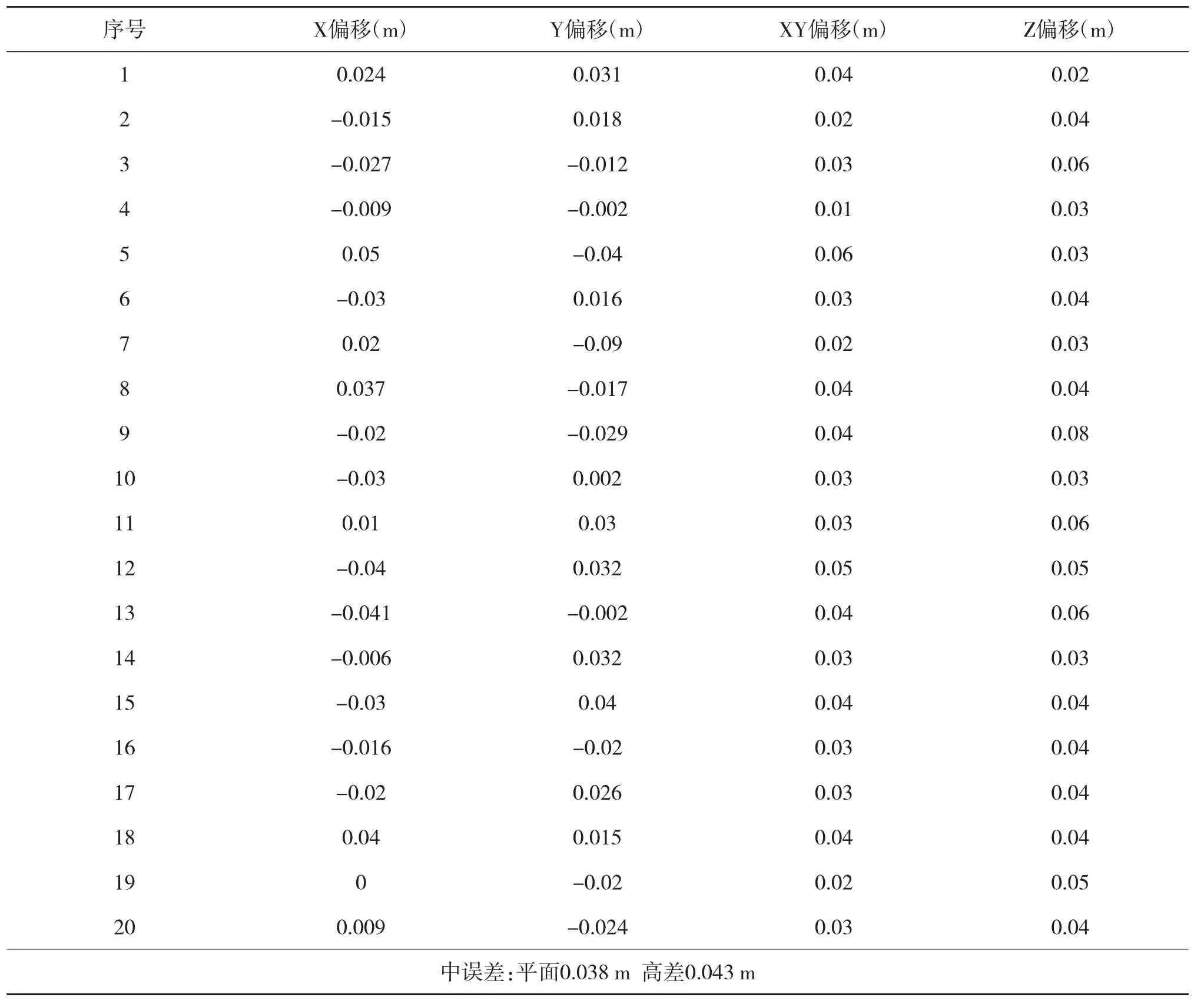
表1 成果誤差統計表
5 誤差來源分析
5.1 地形高差產生的誤差
項目組采用兩個高差不同的村級試點進行數據采集。試點1村莊高差在40 m左右,為原始村莊,村莊建設依托地形較為混亂。試點2村莊高差在10 m左右,為移民搬遷村,村莊建設整齊。從后期處理精度統計得出,在高差較大、地形復雜、房屋密集的村莊(高差在40 m左右),點位差值在10~25 cm,邊長差值也在10~20 cm。三維立體測圖精度勉強能達到1∶2 000測圖精度;在高差不大地形相對平坦的村落(高差在10 m左右),點位差值在5~10 cm,邊長差值在5~10 cm。三維立體測圖精度可以達到1∶1 000測圖精度;由此可見,實際地形高差越小,點位誤差越小:地形高差越大,點位誤差越大。在實際工作中如果項目區高差較大,為保證精度要求,可考慮分層分區拍攝,項目區高差最好控制在1/4航高。
5.2 像控測量產生的誤差
像控點布設及測量嚴格按照要求規范進行。首次作業相控點采用1 m見方的半圓型圖標(圖1),施測為手扶對中方式;再次作業更改為A4紙張大小“L”型圖標進行布點(圖2),作業更改為對中桿施測,盡可能減少相控點測量誤差。經后期計算,像控點精度得到較大提高,精度控制在1 cm以內。

圖1 半圓型圖標

圖2 L型圖標
5.3 解算及采集產生的誤差
如圖3所示,由于地形高差較大,前面房頂與后面道路或者后排房屋地面相平,或者房屋太密集,造成互相遮擋,植被遮擋,傾斜相機不能拍攝到房屋立墻面,立體模型不能有效搭建,不能準確測出房屋的邊線,采集邊線與實測邊線偏差較大。這是此次試驗主要誤差來源。

圖3 地形遮擋示意圖
5.4 人員采集產生的誤差
內業采集使用EPS軟件,內業采集人員的熟練程度,也很大程度影響最終成果的精度。經驗不足的采集人員,采集選位不能選取最佳的點位測繪。出現偏離現象,偏離的差值與采集人員熟練程度有很大關系。所以得出,采集人員的熟練程度也是成果誤差來源之一。建議對內業數據采集人員進行專業軟件使用培訓,并加強內業采集聯系,有必要跟隨外業采集人員熟悉外業工作流程,掌握房屋等采集規律。
5.5 航拍質量產生的誤差
好相機能拍出好的影像,決定影像精度的因素包括了多方面,焦距、像素、感應器尺寸等。作業采用合適的航拍設備,采用適合無人機飛行速度的相機快門值,采用適合航拍高度和天氣的光圈值、ISO值也很重要。除此之外,航拍時間的選擇也不可忽視,盡量選在多云的天氣作業,或者晴天時選擇午間太陽陰影面積最小的時候作業為最佳[4]。
POS精度影響空三運算的結果,進而影響重建模型的細節和幾何形態。在相機、飛行高度等因素不變的基礎上,高質量的POS能夠輔助還原完整的幾何細節,對飛行姿態的容忍度更高并提高空三效率。建議最好搭載后查分系統,獲取高質量的POS數據[5]。
6 結語
利用低空無人機三維傾斜攝影技術測繪大比例尺地形圖應用已非常廣泛,將逐步替代傳統大比例尺測繪手段。提高作業效率,提高測繪精度,是此技術發展的方向。測繪誤差來源途徑很多,文章也介紹了常見的幾種誤差來源,地形高差產生誤差、像控測量產生的誤差、解算及采集產生的誤差、人員采集產生的誤差、航拍質量產生的誤差,提出了解決建議,希望為低空無人機三維傾斜攝影技術的發展和應用提供經驗。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
核科學與工程(2015年4期)2015-09-26 11:59:03
兒童故事畫報(2013年3期)2013-06-24 05:40:30
