
一種多雷達跨區域組網多目標跟蹤方法
2023-08-04 13:50:18朱海峰陳勝華
黑龍江交通科技 2023年8期
關鍵詞:檢測
朱海峰,陳勝華
(1.中國電子科技南湖研究院,浙江 嘉興 314002;2.浙江海康智聯科技有限公司,浙江 杭州 310012)
目前,道路的智能化建設是交通行業內最熱門的話題之一。而道路的智能化離不開感知,其中車輛位置狀態的感知是整個感知體系中最為重要的部分,獲得實時精準的位置信息能夠提高智慧調度系統的路網運行監測能力,指揮調度能力,擁堵發現能力[1-2]等,因此各省市都在探索車輛實時位置感知的方案,目標是低成本、高可靠性、高精度、全天候、全覆蓋。
近年來隨著視頻技術的發展,道路上大量使用攝像機感知。但也存在較多的問題,一是高清像機價格昂貴,且易受照明、天氣等影響,容易出現數據丟失、檢測錯誤等異常;二是一般道路都會存在大量普通像機,如果大量使用高清像機,沒有充分利用現有的感知系統,容易造成浪費。而雷達剛好可以克服照明、天氣的影響,并且可以利用現有的感知系統。
目前,單臺雷達的檢測距離大概250 m,通過多臺雷達的軌跡拼接可以實現全天候、全覆蓋檢測車輛位置[3]。但目前的拼接算法也存在一些問題,如只適用于交通流量較小、無遮擋、檢測精度高、道路條件較好等情況,當出現大流量、有遮擋、彎道、檢測精度不夠時,不能達到全程全局的跟蹤目標的目的[5-6]。
1 基本原理
首先對實時進入的車輛軌跡數據進行分類,識別突然消失的車輛、突然出現的車輛、進入檢測區的車輛、進入非重疊區的車輛、進入重疊區的車輛、離開檢測區的車輛[7-8];然后對重疊區的車輛依次進行多點匹配,匹配成功的車輛更新到全局跟蹤集合中,同時刪除突然消失集合中匹配成功的車輛。匹配失敗的車輛按照條件篩選進入突然出現集合中;最后將突然消失集合與突然出現集合進行移動平均預測及卡爾曼濾波[9-10],解決道路條件不佳或大車遮擋等情況下車輛數據丟失嚴重的情況,并采用預測的結果進行匈牙利多目標匹配[11],匹配成功的更新到全局跟蹤集合中,同時刪除突然消失集合中匹配成功的車輛,匹配失敗的在下一次迭代中進行匹配。
2 車輛軌跡所屬區域的判定
為了能夠使雷達軌跡數據在各場景下進行有針對性的拼接,將雷達檢測區域劃分為初次進入雷達檢測區、非重疊區、前重疊區、后重疊區、離開雷達檢測區。設雷達A為檢測區第一個雷達,雷達F為檢測區最后一個雷達,道路方向與x坐標平行,各雷達的檢測區為[L1,L2],對于第一個雷達
(1)
對于最后一個雷達
(2)
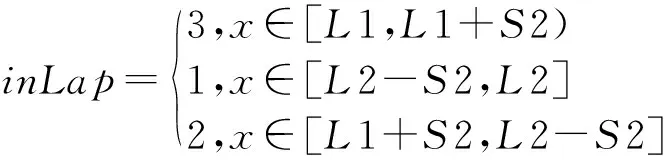
(3)
式中:inLap代表所在區域;值1代表在后重疊區;值2代表在非重疊區;值3代表在前重疊區;值4代表離開雷達檢測區;值5代表初次進入雷達檢測區;x代表車輛在檢測區的x坐標,m;L1代表檢測區的起點,m;L2代表檢測區的終點,m;S1代表進入檢測區距離閾值,m;S2代表重疊區距離閾值,m;S3代表離開檢測區距離閾值,m。
3 所屬各集合的判定
為了能夠使雷達軌跡數據在各場景下進行有針對性的拼接,采用不同的集合對雷達軌跡數據進行劃分,包括:突然消失集合DAC、突然出現集合AC、重疊區集合LC、全局跟蹤集合GC。
如圖1所示,當前時間為t,ms;設置雷達軌跡數據允許的延遲時間為a,ms;即在t時刻,t-a時刻之前的數據都已收到;軌跡消失的時間判定閾值為b,ms;軌跡進入突然消失集合DAC的判定條件為
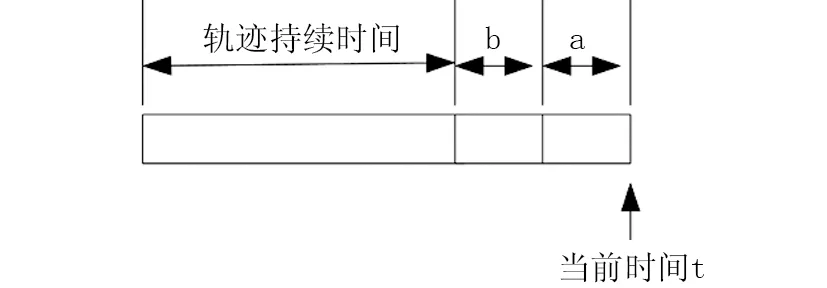
圖1 軌跡消失示意圖
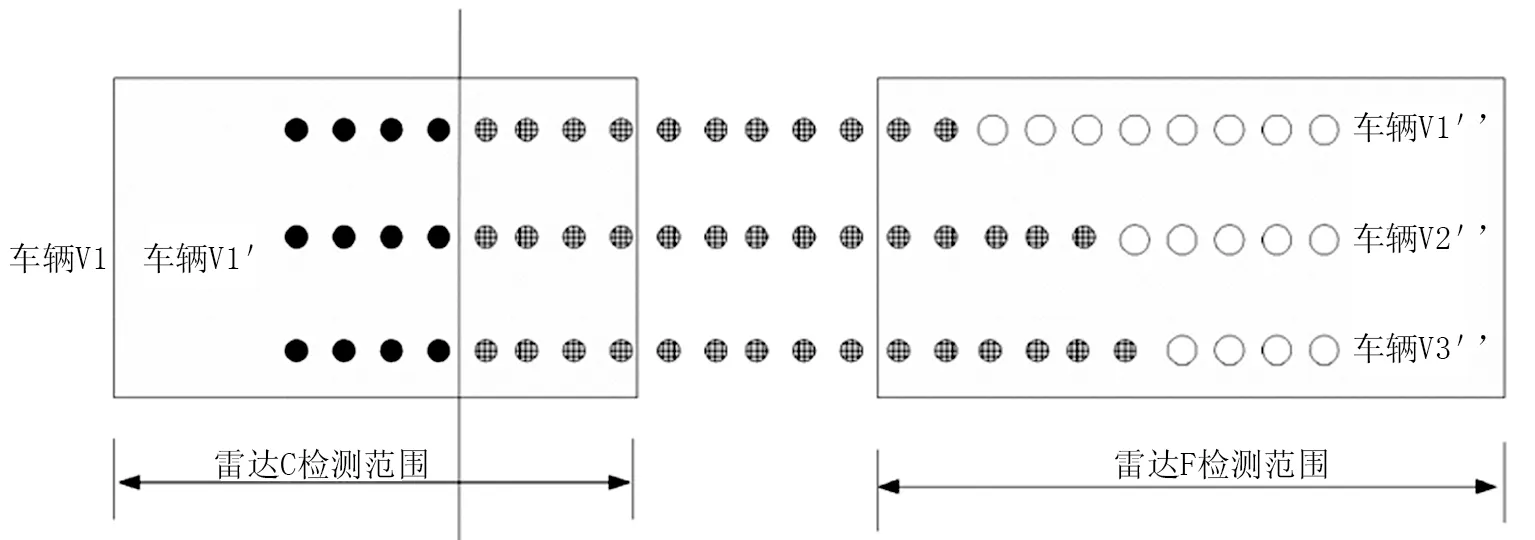
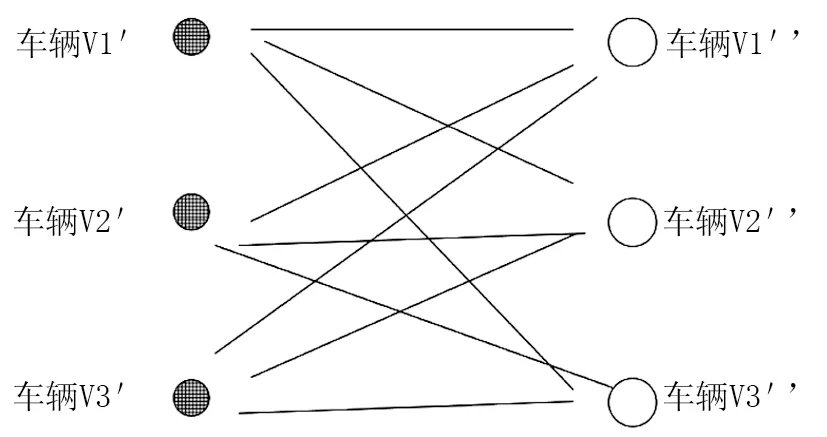
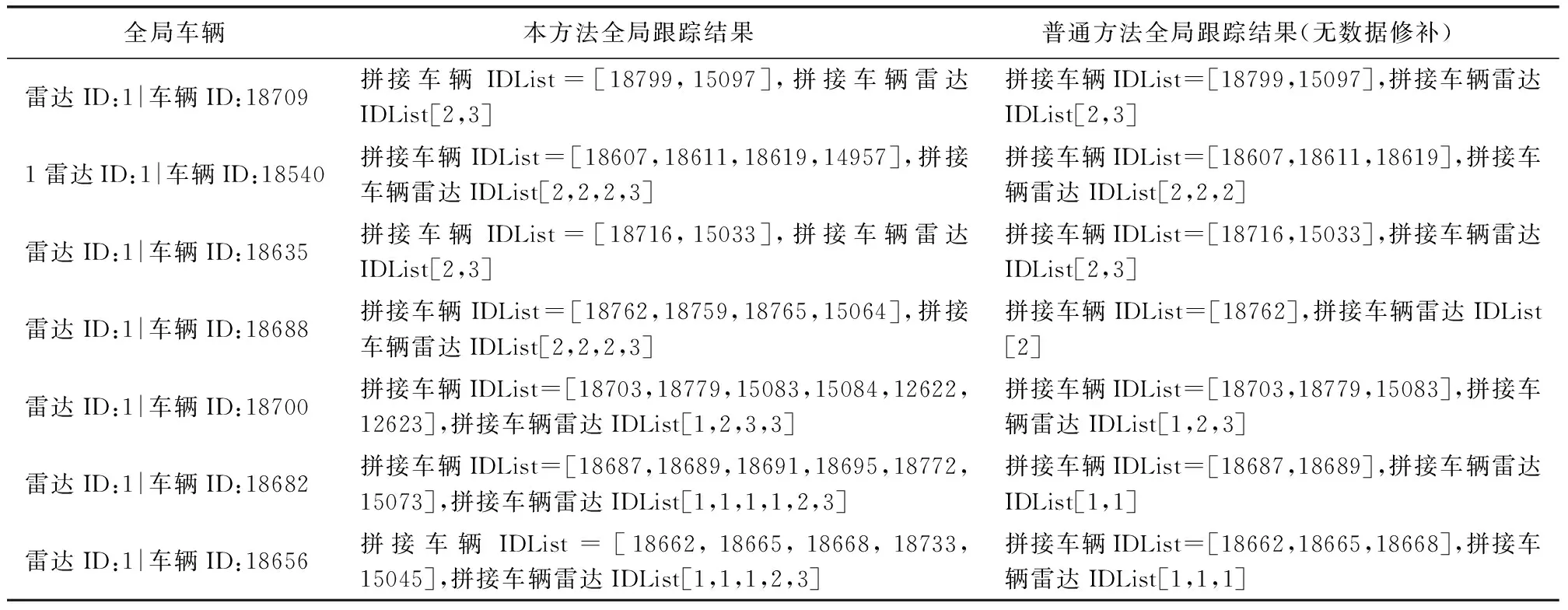
Tracev,endTime+b (4) 式中:Tracev,endTime為車輛v的軌跡Trace的最后到達時間,ms,在Tracev,endTime時刻之后持續時間b都未收到車輛v的軌跡數據。 當前時刻為t,允許數據延遲時間為a′,ms,即在t時刻,t-a′時刻之前的數據都已收到;圖中跟蹤窗口即為軌跡拼接分析的時間間隔,長度設置為,每隔Δt進行一次軌跡拼接。 在跟蹤窗口內,分析得到軌跡突然出現集合AC,軌跡進入突然出現集合AC的判定條件為 Tracev=LCANDTtimeDiff+d<ΔtANDTracestartTime-e>t-a′-ΔtANDTracev,imLap!=5 (5) 式中:Tracev為車輛v的軌跡;TracetimeDiff為車輛v在跟蹤窗口內的時間區間長度,ms;d為軌跡異常的時間閾值,ms;TracestartTime為車輛在跟蹤窗口內的軌跡開始時間,ms;e為軌跡突然出現的時間閾值,ms。 為了使數據分析同步,設置a′=a+b。 如圖3所示,為突然出現集合實時分析流程 圖3 實時分析數據示意圖 車輛在重疊區的軌跡由相鄰兩個雷達產生。第i個重疊區由第i個雷達與第i+1個雷達產生,由第i個雷達產生的重疊區i稱前重疊區LCi,front,由第i+1個雷達產生的重疊區i稱后重疊區LCi,back。 進入LCi,front的判定條件為 Tracei,v,inLap=3 (6) 進入LCi,back的判定條件為 Tracei+1,v,inLap=1 (7) 式中:Tracei,v,inLap=3代表第i個雷達中車輛v的軌跡在前重疊區;Tracei+1,v,inLap=1代表第i+1個雷達中車輛v的軌跡在后重疊區。 全局跟蹤集合GC:所有進入雷達檢測區的車輛都會進入到這個集合中,并分配全局唯一的編號,如車輛在第一個雷達中的編號為V1′,在第二個雷達中的編號為V1″,依此類推,在不同的雷達中會有不同的編號,但始終會有一個唯一的編號V1一直對應著同一輛車,直到V1離開雷達檢測區。 (1)重疊區匹配只在相鄰雷達之間進行,如第i個重疊區,相關重疊集合為LCi,front、LCi,back。 (2)LCi,front中的每一條記錄Tracei,front與LCi,back中的每一條記錄Tracei,back進行匹配,滿足以下條件即匹配成功 |Pointk,time,front-Pointj,time,bace|≤ΔTime (8) Distancek,j≤Dist (9) |Pointk,speed,front-Pointj,speed,bace|≤ΔSpeed (10) |Pointk,length,front-Pointj,length,bace|≤ΔLength (11) 式中:Pointk,time,front代表前重疊區某條軌跡上的第k條軌跡點的時間戳,ms;Time代表后重疊區某條軌跡上的第j條軌跡點的時間戳,ms;Pointj,time,back代表判定兩個時間戳足夠接近的閾值,ms;Pointk,speed,front代表前重疊區某條軌跡上的第k條軌跡點的速度值,km/h;Pointj,speed,back代表后重疊區某條軌跡上的第j條軌跡點的速度值,km/h;Speed代表判定兩個速度值足夠接近的閾值,km/h;Pointk,length,front代表前重疊區某條軌跡上的第k條軌跡點采集到的車身長度,m;Pointj,length,front代表后重疊區某條軌跡上的第j條軌跡點采集到的車身長度,m;ΔLengt代表判定兩個車身長度足夠接近的閾值,m;Distancek,j代表k軌跡點與j軌跡點的距離,m;Dist代表判定兩個車距離足夠接近的閾值,m。 (3)突然消失集合DAC的更新:若Tracei,front匹配成功,去除DAC集合中Tracei,frant相應的車輛記錄。 (4)全局集合GC的更新:若Tracei,front與Tracei,back匹配成功,在GC中查找Tracei,front,id,并在GC中將Tracei,front,id的拼接ID改為Tracei,back,id。 (5)突然出現AC集合的更新:匹配完成后,將未匹配成功的車輛按照條件加入到突然出現集合AC中,規則如下 TracetimeDiff+d (12) 如圖3所示,針對非重疊區的軌跡拼接(有部分來自重疊區匹配失敗的軌跡數據),軌跡的消失和軌跡的出現由于某些原因可能相隔較遠的距離,首先采用直線趨勢預測模型對軌跡數據進行填補,填補規則如下 圖3 非重疊區軌跡填補 n=(TracestartTime,back-TraceendTime,front/timelnterval (13) (14) (15) (16) (17) Pointt+n=pat+pbt×n (18) 因為不確定消失的軌跡與出現的軌跡之間的對應關系,因此任意消失的軌跡與任意出現的軌跡之間都可以進行數據的填補。但是這些預測填補的點以及之前的觀測歷史軌跡都會存在較大的偏差,采用卡爾曼濾波對歷史軌跡及填補軌跡進行濾波,得到一組更加可信的軌跡。 基于填補并濾波之后的軌跡的最后一個點,即pointNewmt+n,可以計算與出現軌跡第一個點之間的距離。距離采用火星坐標系進行計算。 如圖4所示,任意消失軌跡通過預測濾波并計算得到與任意出現軌跡之間的距離,以距離及車身長度的變換值作為權重,運用匈牙利算法進行多目標匹配。 圖4 非重疊區多目標匹配 變換規則如下 maxDistance=MAX(distancei,j)+α×MIN(distancei,j) (19) maxLengtDiff=MAX(|lengtDiffij|)+β×MIN(|lengtDiffij|) (20) (21) 式中:maxDistance為消失集合與出現集合點之間的最大距離加上一個小的偏移量,m;MAX(distancei,j)為消失集合與出現集合點之間的最大距離,m;MIN(distancei,j)為消失集合與出現集合點之間的最小距離,m;α為偏移參數;maxLengtDiff為消失集合與出現集合車之間的最大車長差加上一個小的偏移量;MAX(|lengtDiffij|)為消失集合與出現集合車之間的最大車長差,m;MIN(|lengtDiffij|)為消失集合與出現集合車之間的最小車長差,m;β為偏移參數;weigtij為消失集合與出現集合車之間的匹配權重;γ為距離的權重參數;δ為車長差的權重參數。 采用煙墩高速分合區全息管控平臺項目路網數據,并架設3臺雷達進行算法驗證。道路總長470 m,1號雷達安裝位置在道路的起點位置,以安裝位置為檢測坐標原點,檢測范圍為[0,125],其他雷達采用相同方法設置原點;2號雷達安裝位置在道路的125 m位置,檢測范圍為[0,214];3號雷達安裝位置在道路的218 m位置,檢測范圍為[0,252];因道路兩旁裝有鐵質護欄,且道路上空存在龍門架,大型車輛較多,雷達進行數據采集時存在較多數據丟失情況。 算法設置跟蹤窗口時長為4 s,a=2 s,b=2 s,接近實時對車輛進行軌跡跟蹤。 隨機取煙墩高速公路30 min數據,數據中大車,超大車,小車均采到;車輛密集,車輛稀疏場景均采到;下匝道以及在高速上繼續行駛均存在;數據采集的天氣為陰天,光線尚可。總共統計車輛ID數為100個。 為驗證車輛跟蹤的準確率,采用肉眼觀察的方式,根據車輛進入重疊區時會有兩個同時前進的ID,判定為同一輛車的ID,與算法結果對比的方式進行統計,部分結果如表1所示,準確率為100%。 表1 驗證結果 從表2可以看出,在數據質量較好時,本方法與普通方法都能進行全局的跟蹤,識別到車輛在1、2、3號雷達中的ID;但在數據質量不佳,出現丟失情況如:車輛ID18540、18688、18700、18682、18656行進過程中因遮擋等問題出現數據丟失,本算法能夠有效地對數據質量不佳情況進行數據修補并進行全局跟蹤,普通方法出現目標丟失情況。經統計本算法的軌跡連續性能達到97%。 表2 全局跟蹤結果 經人工統計發現在雷達內及盲區會有少量目標的丟失、錯拼情況,經統計本算法的總體準確率達到95%。 針對現有技術的不足,采用在重疊區采用多點匹配的方式,降低對數據質量的要求,提高匹配的準確度,采用在非重疊區采用移動平均預測法、卡爾曼濾波、匈牙利算法進一步提高匹配的準確度,克服因彎道、大車遮擋數據丟失等情況,實現低成本、高可靠性、高精度、全天候、全覆蓋跟蹤目標的目的。算例分析表明,算法能夠有效地進行車輛跟蹤,并在一定程度上克服數據質量不佳導致目標丟失的問題。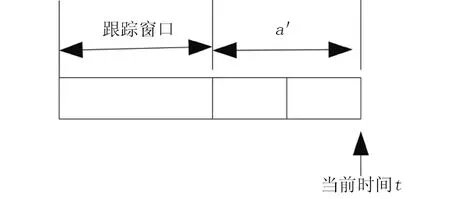
4 重疊區目標跟蹤
5 非重疊區目標跟蹤
6 算例分析

7 總 結
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
