基于機器視覺的水稻印刷播種機成種率檢測
2023-08-04 02:55:18周紅標朱亞文劉曉洋張國良李邊豪
中國農機化學報 2023年7期
周紅標 朱亞文 劉曉洋 張國良 李邊豪
摘要:水稻印刷播種是實現稻種精確定位和均勻播種的有效方法之一。由于機械振動、播種紙走速、稻種輸送等環節影響,播種紙的某些膠點上可能會粘附多個水稻種子,影響播種質量。為此,提出基于機器視覺的水稻印刷播種機成種率檢測方法。首先,利用工業CCD攝像機采集播種紙正面圖像信息;其次,利用紅綠色差提取種子的顏色信息,采用Otsu閾值分割等形態學處理方法實現種子與背景的分離,并利用開運算實現輕微粘連稻種的分離;然后,利用面積閾值方式去除噪點,從而實現水稻種子數量的統計;最后,根據粘連稻種總面積與每個稻種平均面積的比值對緊密粘連的稻種進行處理,從而修正水稻種子的數量。研究結果表明,該成種率檢測方法是有效的,能夠從播種紙的膠點上獲取水稻種子數量信息,檢測的成種率范圍介于88.84%~92.05%。
關鍵詞:水稻;印刷播種機;機器視覺;自適應形態學;精確定位播種;成種率
中圖分類號:S223.2: TP23
文獻標識碼:A
文章編號:20955553 (2023) 070194
07
Detection of seed rate of japonica rice printing planter based on machine vision
Zhou Hongbiao1, Zhu Yawen1, Liu Xiaoyang1, Zhang Guoliang2, Li Bianhao2
(1. Faculty of Automation, Huaiyin Institute of Technology, Huaian, 223003, China;
2. College of Life Science and Food Engineering, Huaiyin Institute of Technology, Huaian, 223003, China)
Abstract:? Rice printing planter is one of the effective methods for precise and uniform sowing of rice seeds. Due to the influence of mechanical vibration, seeding paper speed, and rice seed transportation, several rice seeds would adhere to some glue points on the seeding paper, which affected the seeding quality. To address this issue, a seed rate detection method based on machine vision for printing planters was proposed in this paper. Firstly, the image information of the seeding paper was collected by a CCD camera. Then, the red-green color difference was used to extract the seed color information, morphological processing methods such as Otsu threshold segmentation were used to separate the seeds from the background, and an opening operation was utilized to separate slightly sticky rice seeds. Additionally, the area threshold method was adopted to remove noise and accurately determine the number of rice seeds. Finally, the ratio between the total area of tightly adhered rice seeds and the average area of each rice seed was used to correct the number of rice seeds. The results show that the seed rate detection method is effective in obtaining the number of rice seeds from the glue point of the seeding paper. The range of seeds rate detected was 88.84%-92.05%.
Keywords: rice; printing planter; machine vision; adaptive morphology; precise positioning seeding; seeds rate
0 引言
水稻種植全程機械化可以緩解農村勞動力的不足,還能帶動節本增收增效。2023年政府工作報告中指出我國農作物耕種收綜合機械化率達到73%,但是水稻機械播種環節的精量化仍有待提高。目前,我國南方不少地區仍采用手插秧方式,存在勞動強度大的問題。近年來很多地方采用拋秧、直播、機插等方式,存在種子用量大的問題[12]。水稻精量定位勻播能夠有效克服上述缺陷,印刷播種機是實現精量定位勻播的有效方法之一[3],其在雜交稻播種上的應用較為廣泛,在常規稻播種上的應用也在逐漸增多。
水稻印刷播種機是由印刷機、滾輪和漏斗等機構組成,能夠利用淀粉膠將種子粘在播種紙上,具有精確勻播、節約種子、經濟環保和便于運輸的優點[4]。然而,由于機械振動、紙張走速和稻種輸送等環節影響,播種紙某個膠點上可能會粘結多個稻種,尤其是3個以上,會對后續種子發芽和成苗產生不利影響。為了提高種子成苗率,需要對印刷播種機的多臺電機實行優化控制。然而,電機的反饋控制需要利用膠點粘合的水稻種子數量信息。一般將一張播種紙上膠點粘合的單個和兩個水稻種子之和與水稻種子總數之比定義為成種率。因此,實現對播種紙成種率的檢測將有助于實現電機的優化反饋控制,從而提升水稻印刷播種質量。
近年來,將計算機視覺技術與人工智能技術相結合,實現農業機械的信息化、自動化和智能化已成為現代農業發展的重要方向[57]。國內外研究者借助機器視覺技術和人工智能技術,設計了多種檢測系統或方法[8]。例如采用可見光相機獲取水稻穎花圖像,并構建基于快速卷積神經網絡的開花狀態檢測模型[9];采用高光譜成像設備獲取不同老化天數水稻種子的高光譜圖像,然后進行信息提取,并建立基于支持向量機的水稻種子活力等級分類模型[10];以光譜特征、紋理指數和作物覆蓋度作為輸入,構建基于人工神經網絡的水稻葉面積指數估算模型[11];一種基于Rectified Adam(RAdam)優化器的ResNet50卷積神經網絡圖像識別方法,能夠實現水稻生育期圖像的有效檢測[12];利用機器視覺和卷積神經網絡設計的機器人獼猴桃采摘系統,檢測率達到89.6%[13];利用機器視覺和支持向量機建立的木瓜病害檢測和分類模型,分類精度達到90%以上[14];利用機器視覺和神經網絡建立的柑橘品種品質檢測系統,也取得了較高的檢測精度[15]。
鑒于此,本文首先采用機器視覺技術采集播種紙圖像信息,然后利用紅綠色差和閾值分割提取圖像顏色,并采用面積閾值方式去除噪聲,最后利用開運算對輕微粘連的水稻圖像進行分割,從而實現水稻種子數量的精確計算。
1 材料與方法
1.1 圖像采集
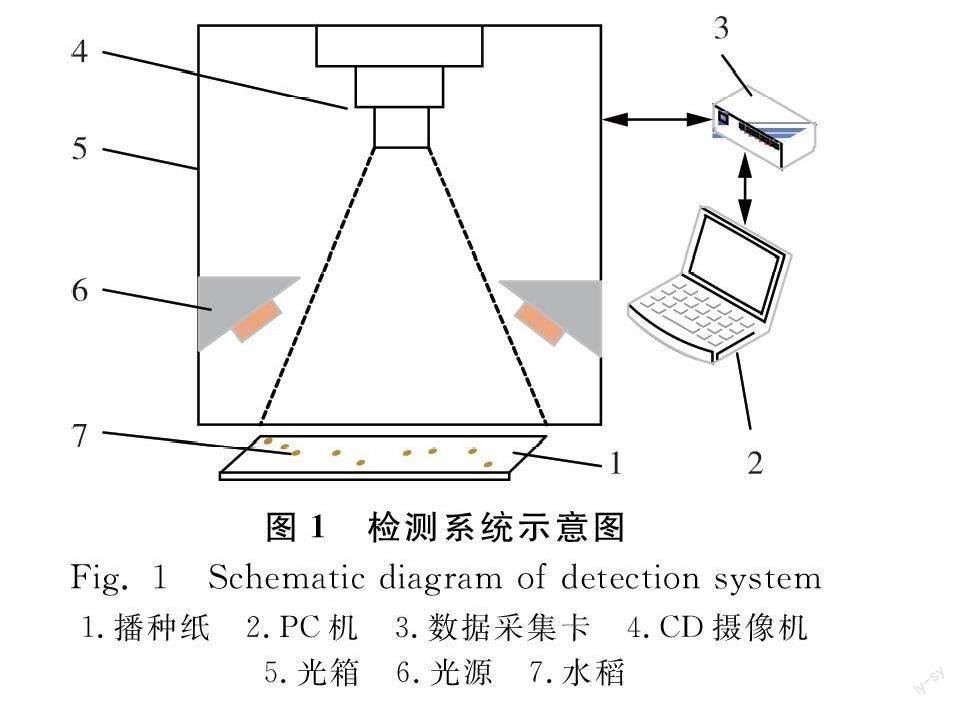
本文依托HDBZ-600型水稻印刷播種機進行播種紙圖像信息的采集。檢測系統主要由CCD攝像頭、數據采集卡、光源、PC機等組成。當播種紙進入拍照區域后,由傳感器發送信號,計算機控制數據采集卡采集圖像信息,并通過以太網傳輸到PC機。在PC端,利用LabVIEW軟件的視覺模塊開發了上位機虛擬檢測平臺,利用MATLAB進行圖像處理和檢測算法研究。檢測系統示意圖如圖1所示,粘連水稻種子的播種紙圖像如圖2所示。
1.2 檢測方法
水稻種子的檢測方法如圖3所示。
首先根據種子區別于背景的顏色,采用紅綠色差法提取種子的顏色特征,從而得到種子與背景亮度有明顯差異的灰度圖像;然后采用最大類間方差法找出背景與種子間進行分割的最優閾值,并采用該閾值將圖像二值化;接著為減少二值圖像中稻種之間可能存在的粘連,采用形態學算法—開運算對二值圖像進行處理,從而斷開連通區域之間的連接;同時針對二值圖像中的小面積噪點進行去除,從而避免其影響種子的計數;再根據二值圖像中連通區域的數量對稻種進行計數;由于部分稻種間粘連難以通過開運算斷開,因此最后需要根據連通區域的面積估算該區域的稻種數量,從而實現對稻種數量的修正,提高計數的精確性。
1.2.1 顏色特征提取
由于CCD攝像頭采集到的是彩色RGB圖像,為了采用紅綠色差進行水稻點的分割,需要首先進行顏色提取。顏色特征提取是實現稻種與背景區域分割的關鍵,從圖2可以看出,稻種顏色呈現紅色,與白色紙張之間存在明顯的顏色差異。為了定量分析稻種顏色與背景的差異,提取了圖2中的一行像素,并根據像素紅、綠、藍三色的值繪制了圖4所示的顏色差異圖。從圖4可以看出,種子區域的紅色分量明顯高于藍色和綠色,且藍色和綠色分量的數值相近;而紙張背景區域紅色、藍色和綠色分量的數值相近。
根據上述顏色特征,本文提出了基于紅綠色差的顏色特征提取方法,具體表達方式如式(1)所示,即采用像素紅色分量和綠色分量的差值表示稻種的顏色特征。
Dc=R-G
(1)
式中:
Dc——種子與背景的顏色差異;
R——像素的紅色分量;
G——像素的綠色分量。
由于RGB圖像的識別處理需要耗費大量時間,本文對原始RGB圖像進行灰度化處理,從而減少后臺程序的計算量,提高視覺軟件的處理速度。在LabVIEW平臺,可以通過視覺函數IMAQ Cast Image將最初32bit的圖片轉化為8bit圖片,接著再通過圖像灰度化函數IMAQ BCG Lookup將拍攝到的彩色圖像轉換為灰度化圖像。在轉換過程中,可對原彩色圖像的Brightness Contrast Gamma等進行調整。轉換后的灰度圖經IMAQ Image To Array函數再轉換為相應的二維灰度值數組。最后,將二維灰度值數組加入二維索引數組中。BCG Values的三個值依次是Brightness 37.0、Contrast 54.40和Gamma 8.52。這些數值是在室內白天正常光照情況下調試獲得。
對圖2所示的原始圖像進行灰度處理得到顏色特征灰度圖如圖5所示,從圖5中可以看出稻種像素的亮度與紙張背景有著顯著的差異。
1.2.2 二值化
為了實現稻種與背景的分割,首先將顏色特征圖歸一化到0~1的范圍內,實現灰度的拉伸,使得稻種與背景的對比更加明顯。然后利用Otsu法對灰度圖像進行二值化分割,其利用最大類間方差自動確定閾值[1517],能夠實現水稻種子和背景之間的良好分割。在對圖像進行閾值分割時,選定的分割閾值應使前景區域的平均灰度、背景區域的平均灰度與整幅圖像的平均灰度之間差別最大,這種差異用區域的方差來表示[1820]。
設圖像中灰度為i的像素數為n,灰度范圍為[0,L-1],則總的像素數
N=∑L-1i=0ni
(2)
各灰度值出現概率
pi=niN
(3)
把圖像中的像素用閾值T分成兩類C0和C1,C0由灰度值在[0,T-1]的像素組成,C1由灰度值在[T,L-1]的像素組成,則區域C0和C1的概率分別為
P0=∑T-1i=0pi
(4)
P1=∑L-1i=Tpi=1-P0
(5)
區域C0和C1的平均灰度分別為
μ0=1P0∑T-1i=0ipi=μ(T)P0
(6)
μ1=1P1∑L-1i=Tipi=μ-μ(T)1-P0
(7)
式中:
μ——整幅圖像的平均灰度。
μ
=∑L-1i=0ipi
=∑T-1i=0ipi+∑L-1i=Tipi
=P0μ0+P1μ1
(8)
兩個區域的總方差為
σB2
=P0(μ0-μ)2+P1(μ1-μ)2
=P0P1(μ0-μ)2
(9)
令T在[0,L-1]范圍內依次取值,使總方差最大的T值便是最佳區域分割閾值,因此該方法也叫做最大類間方差法。本文采用該方法對特征圖進行二值化處理,能夠選取合適的分割閾值使得稻種與背景的類間方差最大,即最大化二者的灰度差異,從而達到最佳的分割效果。二值化后的效果圖如圖6所示。對比圖2可以看出,每一粒稻種都能從背景中完整地分割出來。
1.2.3 噪點去除
從圖6可以看出,部分稻種存在粘連現象,這將影響稻種的準確計數。通過分析稻種間的粘連程度,發現部分輕微粘連的稻種可以采用形態學方法斷開相互間的連接,從而提高稻種計數的準確性。同時,為了避免對其他稻種的影響,本文采用開運算對二值圖像進行處理。
開運算屬于圖像處理中的形態學方法,可以通過結構元素對原始圖像進行卷積運算,達到去除圖像噪聲和消除物體邊界點的目的。開運算主要包含腐蝕與膨脹兩種基本操作:腐蝕可縮小目標范圍,表達式如式(10)所示,表示A被B腐蝕;膨脹可擴張待處理區域,表達式如式(11)所示,表示A被B膨脹。
AB={z|(B)z∩Ac≠Φ}
(10)
AB={z|(B^)z∩AA}
(11)
式中:
A——被膨脹的集合(圖像物體);
Ac——A的補集;
B——結構元素;
(B^)z——
B反射平移z后得到的新集合;
Φ——空集。
將上述運算進行復合:首先對水稻種子圖像進行腐蝕操作,然后對結果進行膨脹操作。形態學方法的開運算對圖像進行孔洞填充,即對圖像進行先腐蝕后膨脹操作,去除細小雜物并使輕微粘連的稻種分開。通過多次試驗,當結構元素設置為99時,可以去除顏色污染,消除細小雜質對處理結果的影響。孔洞填充的表達式如式(12)所示。
Xk=(Xk-1B)∩Ac, k=1,2,3,…
(12)
式中:
X0——
由0組成的陣列,即邊界的初始點;
Xk-1——孔洞填充前的圖像;
Xk——孔洞填充后的圖像。
由于單個水稻種子的成像近乎橢圓形,則設置區域P為單顆水稻種子的成像區域,區域Q為方塊背景區域。假設每個種子的灰度分布大小和其背景近似相同,那么實際分割得到的圖像分割區域和全部圖像的像素比可以近似由圖形P和Q的面積比來確定。為了處理分割后的鋸齒邊緣,通常要進行形態學膨脹處理,因此分割出的籽粒像素區域必須保有一定的余量,通常要求實軸長r和背景長a滿足以下條件
ra/2≤K
(13)
由此條件可以計算出水稻種子像素與背景的面積比
SPSQ=πr2a2≤πΚ24
(14)
式中:
SP——圖形P的面積;
SQ——圖形Q的面積。
面積約束可以應用灰度直方圖的方法實現,并可以表示成式(15)的形式。從灰度0開始,依次計算小于或等于Ts的像素數占采集圖像像素總數的比例,如果該比值與SP/SQ的差的絕對值達到最小,則Ts即為所求最佳面積閾值。
Ts=argminTs∑Tsn=0Ln∑255n=0Ln-SPSQ
(15)
式中:
Ts——面積約束下的閾值;
Ln——
灰度值為n的像素點的數量。
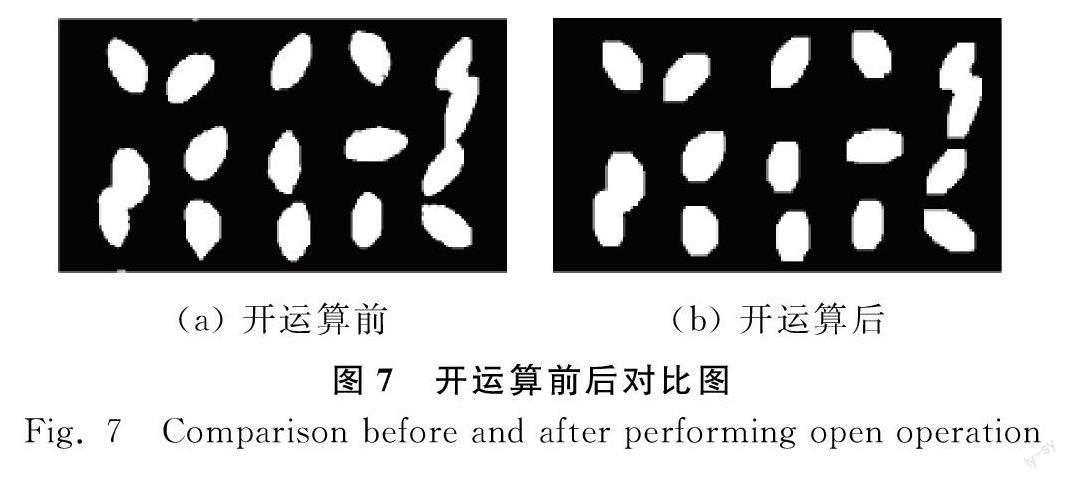
經過對比測試,本文選擇15個像素大小的結構元素進行開運算,開運算前后的局部對比圖如圖7所示。從圖7(b)可以看出經開運算處理后,輕微粘連的稻種被分開,但粘連較為嚴重的稻種仍然處于粘連狀態。
本文首先采用開運算對輕微粘連的稻種進行分離,然后將圖中面積小于稻種平均面積1/5的區域置為0。其中,稻種的平均面積由統計得到,根據1 000粒稻種的統計結果顯示,稻種的平均面積約為1 400個像素大小,其1/5為280個像素。去除噪點后的圖像如圖8所示,對比圖6可以看出圖中的噪點已經被盡數清除。
1.2.4 數據修正
圖8中存在大量緊密粘連的稻種,難以實現準確的統計。為了使得統計結果更加精確,計算圖8中每個連通區域的像素面積,再計算其與稻種的平均面積比值,最后根據比值的結果對連通區域稻種的數量進行計算,從而實現稻種的精確計數。
2 試驗結果與分析
以2021年10月采集的播種紙圖像為研究對象,從中選取5張完整的播種紙,采用上述檢測方法進行處理和分析。其中編號為001的播種紙圖像處理結果如圖9所示,該張播種紙上的種子個數為2 054個。由于全局圖難以發現局部處理信息,因此進行局部放大處理,如圖10所示。
從圖10可以清晰地看出,有9個膠點上只粘附1個水稻種子,有4個膠點上粘附了2個水稻種子,有2個膠點上粘附了3個水稻種子。檢測方法給出的數量與實際情況一致。
成種率的檢測結果如表1所示。可以看出,膠點上附有1顆種子的數目為1 457個,占比70.93%;膠點上附有2顆及以下種子的占比為89.72%;膠點上附有3顆及以上種子的占比較少。結果表明,一張播種紙上有接近九成的種子具有較好的勻種性。
利用所建系統和所提算法對多張播種紙的成種率進行檢測,結果如表2所示。表2中成種率統計的是膠點上附有2顆及以下種子的占比。從表2可以看出,播種紙的成種率均在90%左右,表明印刷播種機不僅運行穩定而且成種率較高,同時也表明本文所設計的檢測方法切實可行。后續將利用檢測結果調整印刷播種機的控制策略,有望能夠取得95%以上的成種率。
3 結論
1) 本文針對水稻印刷播種成種率檢測問題,提出了一種基于機器視覺和自適應形態學的檢測方法。利用工業CCD攝像機、光源、圖像采集卡、上位機組成的成種率檢測系統安裝在印刷播種機上獲取播種紙圖片信息。利用Otsu等自適應形態學方法對圖像進行顏色提取,結合紅綠色差和閾值分割對圖像進行處理,能夠實現稻種與背景區域的有效分割。利用面積閾值法能夠有效去除圖像中的細小顆粒噪聲,尤其是采用開運算對輕微粘連的水稻圖片進行分割,提升了水稻種子數量統計精度。
2)? 播種紙上的成種率最高達到92.05%,最低也有88.84%,表明該檢測方法能夠精確定位水稻種子,準確判斷膠點上水稻種子數目,為提升印刷播種機的精播和勻播性能提供數據支撐。
3) 下一步研究工作是利用成種率檢測結果調整印刷播種機上的電機轉速,實現閉環反饋優化控制,從而提升水稻印刷播種的質量。
參 考 文 獻
[1] 李澤華, 馬旭, 李秀昊, 等. 水稻栽植機械化技術研究進展[J]. 農業機械學報, 2018, 49(5): 1-20.
Li Zehua, Ma Xu, Li Xiuhao, et al. Research progress of rice transplanting mechanization [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 1-20.
[2] 張洪程, 胡雅杰, 戴其根, 等. 中國大田作物栽培學前沿與創新方向探討[J]. 中國農業科學, 2022, 55(22): 4373-4382.
Zhang Hongcheng, Hu Yajie, Dai Qigen, et al. Discussions on frontiers and directions of scientific and technological innovation in Chinas field crop cultivation [J]. Scientia Agricultura Sinica, 2022, 55(22): 4373-4382.
[3] 莊春, 紀力, 邵文奇, 等. 印刷播種大壯苗育秧技術下水稻機插適宜密度與效果研究[J]. 江蘇農業科學, 2019, 47(7): 69-72.
Zhuang Chun, Ji Li, Shao Wenqi, et al. Study on the suitable density and effect of rice machine transplantation with printing and sowing techniques for growing large and strong seedlings [J]. Jiangsu Agricultural Sciences, 2019, 47(7): 69-72.
[4] 鐘平, 邵文奇, 徐文靜, 等. 印刷播種技術對機插秧苗素質和栽插質量的影響[J]. 金陵科技學院學報, 2014, 30(4): 51-54.
Zhong Ping, Shao Wenqi, Xu Wenjing, et al. The effects of printing-sowing technology on seedling and the transplanting quality of mechanical transplanting rice [J]. Journal of Jinling Institute of Technology, 2014, 30(4): 51-54.
[5] 王僑, 劉卉, 楊鵬樹, 等. 基于機器視覺的農田地頭邊界線檢測方法[J]. 農業機械學報, 2020, 51(5): 18-27.
Wang Qiao, Liu Hui, Yang Pengshu, et al. Detection method of headland boundary line based on machine vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(5): 18-27.
[6] 劉海濤, 伊麗麗, 蘭玉彬, 等. 機器視覺在棉花智能打頂領域的應用研究進展[J]. 中國農機化學報, 2021, 42(6): 159-165.
Liu Haitao, Yi Lili, Lan Yubin, et al. Research progress in the application of machine vision in the field of cotton intelligence topping [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 159-165.
[7] Rehman T U, Mahmud M S, Chang Y K, et al. Current and future applications of statistical machine learning algorithms for agricultural machine vision systems [J]. Computers and Electronics in Agriculture, 2019, 156: 585-605.
[8] Bai J, Hao F, Cheng G, et al. Machine vision-based supplemental seeding device for plug seedling of sweet corn [J]. Computers and Electronics in Agriculture, 2021, 188: 106345.
[9] 張亞莉, 肖文蔚, 盧小陽, 等. 基于可見光圖像的水稻穎花開花狀態檢測方法[J]. 農業工程學報, 2021, 37(9): 253-262.
Zhang Yali, Xiao Wenwei, Lu Xiaoyang, et al. Method for detecting rice flowering spikelets using visible light images [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 253-262.
[10] 孫俊, 張林, 周鑫, 等. 采用高光譜圖像深度特征檢測水稻種子活力等級[J]. 農業工程學報, 2021, 37(14): 171-178.
Sun Jun, Zhang Lin, Zhou Xin, et al. Detection of rice seed vigor level by using deep feature of hyperspectral images [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(14): 171-178.
[11] 杭艷紅, 蘇歡, 于滋洋, 等. 結合無人機光譜與紋理特征和覆蓋度的水稻葉面積指數估算[J]. 農業工程學報, 2021, 37(9): 64-71.
Hang Yanhong, Su Huan, Yu Ziyang, et al. Estimation of rice leaf area index combining UAV spectrum, texture features and vegetation coverage [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 64-71.
[12] 徐建鵬, 王杰, 徐祥, 等. 基于RAdam卷積神經網絡的水稻生育期圖像識別[J]. 農業工程學報, 2021, 37(8): 143-150.
Xu Jianpeng, Wang Jie, Xu Xiang, et al. Image recognition for different developmental stages of rice by RAdam deep convolutional neural networks [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(8): 143-150.
[13] Habib M T, Majumder A, Jakaria A Z M, et al. Machine vision based papaya disease recognition [J]. Journal of King Saud University-Computer and Information Sciences, 2020, 32(3): 300-309.
[14] Williams H A, Jones M H, Nejati M, et al.Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms [J]. Biosystems Engineering, 2019, 181: 140-156.
[15] Srivastava S, Vani B, Sadistap S. Machine-vision based handheld embedded system to extract quality parameters of citrus cultivars [J]. Journal of Food Measurement and Characterization, 2020, 14(5): 2746-2759.
[16] Mi C, Chen K, Zhang Z W. Research on tobacco foreign body detection device based on machine vision [J]. Transactions of the Institute of Measurement and Control, 2020, 42(15): 2857-2871.
[17] Kumar S D, Esakkirajan S, Bama S, et al. A microcontroller based machine vision approach for tomato grading and sorting using SVM classifier [J]. Microprocessors and Microsystems, 2020, 76: 103090.
[18] Zhang S, Yang X, Wang Y, et al. Automatic fish population counting by machine vision and a hybrid deep neural network model [J]. Animals, 2020, 10(2): 364.
[19] Jacques A B, Adamchuk V, Park J, et al. Towards a machine vision-based yield monitor for the counting and quality mapping of shallots [J]. Frontiers in Robotics and AI, 2021, 8: 41.
[20] Tang Y, Chen M, Wang C, et al. Recognition and localization methods for vision-based fruit picking robots: A review [J]. Frontiers in Plant Science, 2020, 11: 510.
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
今日農業(2021年14期)2021-10-14 08:35:40
文苑(2020年6期)2020-06-22 08:41:52
文苑(2019年22期)2019-12-07 05:29:00
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22