基于三維點云的工程結構平面分割及表面檢測
2023-08-08 01:05:44余潤澤單伽锃李培振楊紅梅王玉龍
中南大學學報(自然科學版) 2023年6期
余潤澤,單伽锃,李培振,楊紅梅,王玉龍
(1.同濟大學 結構防災減災工程系,上海,200092;2.廣聯達科技股份有限公司,北京,100193;3.廣州地鐵建設管理有限公司,廣東 廣州,510330)
工程結構的三維可視化、幾何特征提取和可見物理表面檢測對評價其建造質量與服役狀態具有重要工程意義。近年來,隨著激光掃描技術和圖像三維重建方法的發展,物理對象的三維點云模型被廣泛應用于結構檢測等領域[1-3],帶來了數字化和智能化的發展趨勢[4-5]。研究表明,基于圖像的三維重建方法能夠建立具備足夠精度的點云模型[6-7],例如KHALOO 等[8]設計的方法能夠生成精度為0.1 mm 的密集點云,使得基于空間點云模型的工程結構幾何特征識別與物理狀態檢測成為可能。
在工程結構檢測中,基于幾何體或特征面的結構準靜態變形(例如傾斜、不均勻沉降等)和基于可見物理表面的結構損傷狀態(例如墻體開裂、墻面剝落)都是重要的工程參數[9-10]。目前,傳統結構狀態測量與檢測方法包括水準測量、全站儀測量等。傳統測量方法本質上是針對離散點局部位置的測量,不同測點的選擇都可能影響最后的測量結果,且無法充分映射工程結構的連續性物理體本質特征。而激光掃描測量與圖像三維重建能建立高保真的虛擬三維數字模型,具備獲得更全面結構狀態信息的條件,且容易獲得比離散點局部觀測更準確和魯棒的測量結果[11]。從工程結構三維物理實體出發,三維點云模型為工程結構狀態的可視化與狀態分析提供了全面的數據,處理與挖掘點云模型已成為結構數字化檢測的重要內容之一。其中,基于工程分析需求的點云模型分析及其關鍵特征提取通常需要先高效分割幾何體和特征面[12-13]。
目前,工程結構的點云分割方法已取得一系列的研究進展。例如,經典的隨機采樣一致性(random sampling consistency,RANSAC)算法已用于鋼拱橋的虛擬預拼裝[14],改進的RANSAC 算法應用于復雜建筑物屋頂的平面分割[15],區域成長法已應用于房屋群的屋頂分割[16]。面對不同的工程檢測場景與個性化需求,點云分割算法得到了進一步改進與發展,例如針對室內場景的點云平面分割改進算法,針對砌體建筑外墻的構件分割分類算法[17],針對建筑物立面特征提取的分割與聚類方法[18],基于特征聚類方式的道路平面分割方法[19]。而在結構檢測領域,針對檢測工程結構準靜態變形和可見物理損傷,主要采用手動方式分割平面,例如基于空間位置手動分割結構平面用于表面裂縫檢測[20]、根據感興趣區域手動提取基坑平面用于基坑變形檢測[21-22]。考慮工程結構的體積巨大,以多層建筑為例,其點云模型往往具有百萬量級的點云數據量,同時要人為處理點云噪點、周邊環境等干擾因素,一定程度上限制了三維點云模型數據分析與信息挖掘的精度、效率與穩定性。因此,需要從工程結構檢測的適用性角度出發,發展一類結構三維點云模型的快速分割方法與多元特征分析方法。本文提出了一種基于三維點云模型的工程結構特征面分割及表面檢測方法,為工程結構構件層次物理狀態可視化與數字化評估建立基礎。
1 點云分割方法
1.1 總體框架
本文提出的點云分割與表面檢測方法主要包括3個階段,分別是整體點云的輸入、關鍵點云的處理以及結構的狀態估計,如圖1所示。

圖1 基于點云的結構平面分割及狀態估計方法原理Fig.1 Principle of structural plane segmentation and state estimation method based on point cloud
1) 通過圖像三維重建或者激光掃描直接生成初始點云模型。其中,基于圖像的三維重建方法可利用開源的重建代碼或使用國內外商用軟件,例如大疆制圖、Pix4Dmapper和ContextCapture等,均可實現基于圖像的密集三維點云重建。對于生成的點云模型,可以通過軟件CloudCompare、Open3D庫或者Point Cloud Library編輯庫實現點云的濾波,降噪,裁剪等預處理步驟,獲取滿足后續分割分析要求的點云模型。
2) 為了提高計算效率,在保證點云精度的條件下,使用Python 語言設計相關算法依次進行密集點云降采樣、點云分割、同類點云聚類、點云上采樣等步驟,提取結構點云模型各個目標特征面。
3) 根據獲得的結構墻面點云,使用最小二乘法和回歸分析等數學方法推導結構墻面的數理方程,使用Python 語言設計相關算法,測量結構各個墻面的整體傾斜與表面形狀。
1.2 算法設計
點云可以通過激光掃描儀直接生成,也可以通過基于圖像的三維重建生成。通常,原始點云模型數據龐大,內部噪點較多,難以直接用于工程結構的狀態估計,點云預處理是為后續算法處理生成高質量的點云。點云預處理方法主要為濾波、降采樣、裁剪、仿射變換等。預處理后的密集點云通常有數百萬個點,直接處理數百萬個點會耗費大量時間。因此,本文采用體素降采樣算法來進行密集點云模型的降采樣,其基本原理如圖2所示。體素降采樣算法是以體素網格中所有點的質心來近似代表該體素中所有的點。其中,算法的關鍵參數是體素尺寸V,體素尺寸與降采樣后的點云規模呈反比。研究表明,參數合理的降采樣算法能有效維持原有點云模型的主要空間特征。點云處理之后再把降采樣的體素點還原成原始點云,實現不改變點云原始密度情況下的快速點云處理。

圖2 三維點云數據的體素降采樣與上采樣處理方法原理Fig.2 Principle of Voxel Grid Method and Voxel Upsampling Method for 3D point cloud data
體素降采樣之后,本文采用RANSAC 算法分割點云模型,其原理如圖3所示。RANSAC通過隨機采樣點來擬合模型,根據擬合閾值確定幾何模型內點,分割幾何模型內點與外點。RANSAC 算法是一種隨機參數估計算法,適用于在大量噪聲點的情況下擬合提取直線、平面等具有明確數學模型的對象。RANSAC有2個關鍵參數,擬合閾值T和迭代次數K。

圖3 隨機采樣一致(RANSAC)算法原理Fig.3 Principle of random sampling consensus(RANSAC) algorithm
使用RANSAC 算法處理點云,會使同一平面內不同墻面及噪點分割在一起。因此,需要對RANSAC 處理后的點云模型再次處理。本文采用基于密度的聚類算法(density-based spatial clustering of applications with noise,DBSCAN)分割目標特征面以及消除潛在噪點。DBSCAN 算法可以有效區分三維點云的高密度區域與低密度區域,并單獨分割出各個高密度區域。DBSCAN 算法需要2個控制參數:點的鄰域半徑和形成密集區域所需點的最少數量,分別用E和M表示。
本文設計的點云處理算法融合了降采樣、RANSAC 和DBSCAN 算法,能夠有效分割結構各個墻面,其原理如圖4所示。首先,使用體素降采樣方法處理點云,每個體素中所有點的質心作為近似采樣點,最近2個點間的距離約等于體素尺寸V。之后,使用RANSAC 算法分割出結構平面點。結構平面內點排列密集且有規律,結構平面噪點排列稀疏、隨機。因此,使用DBSCAN 算法很容易區分不同墻面內點和噪點。在結構平面內點(DBSCAN 算法中核心點)的鄰域內至少有4 個點,而結構平面噪點(DBSCAN算法中噪點)的鄰域內最多有3 個點。設置DBSCAN 算法參數E=1.2V,M=4,便可以準確地提取與聚類不同墻面的結構平面內點。

圖4 融合了降采樣、RANSAC和DBSCAN算法的點云處理算法原理Fig.4 Principle of point cloud data processing algorithm integrating Voxel Grid, RANSAC, and DBSCAN method
1.3 狀態估計
對于已經分割提取的各結構特征平面點云集,首先可以分析所在特征平面的空間姿態,例如平面整體傾斜。若結構平面平整如圖5(a)所示,可以使用最小二乘法擬合同類結構平面離散點,推導擬合平面方程,并基于水平參考平面識別所在特征平面的傾角θ。若結構平面存在凹凸情況,如圖5(b)所示,無法直觀分析平面空間姿態時,假定該平面的擬合方程為:
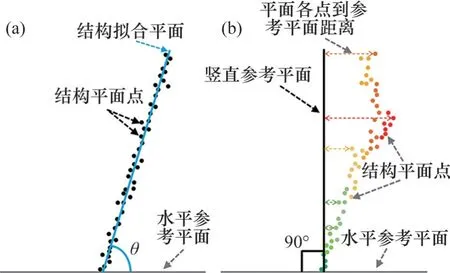
圖5 結構平面傾斜與表面形狀測量原理Fig.5 Principle of structural plane inclination and surface shape measurement
式中:a,b,c和d是平面方程的系數;(x,y,z)代表平面上各個點的坐標。
可設定垂直于水平面的結構數值參考平面方程為:
計算結構平面各離散點到豎直參考平面的距離,即可識別該平面的表面形狀及其空間分布。針對分割點云平面的空間姿態和平面形狀分析,再結合工程結構檢測需求,可拓展識別該平面的相對變形。
2 工程實例
2.1 工程概況
本文以廣州地鐵某在建車站項目為實例,對其進行平面分割與表面測量。此項目基坑長為177.9 m,寬為23.5 m,現場試驗時開挖深度約為9 m,基坑的整體與局部狀態如圖6(a)和6(b)所示。本研究使用大疆精靈4 RTK 無人機對基坑拍攝了1 753張實景照片。同時,使用全站儀測量19個地面控制點(ground control point,GCP)。每張圖像的分辨率為5 472 像素×3 648 像素。圖6(c)展示了大疆制圖軟件重建的基坑三維點云模型,其中使用GCP控制點云模型質量,GCP在x,y和z方向的均方根誤差(RMSE)分別為6.18,10.38 和35.68 mm,整體均方根誤差為37.67 mm,各個GCP 的誤差如表1所示。生成的點云有44 508 258個點,文件容量約為1.41 GB,包括基坑壁、基坑的梁柱和周邊的環境。為了便于分割基坑平面,即分割提取基坑壁,需要對基坑點云進行預處理。采用降噪濾波和仿射變換等方式預處理點云,裁剪掉周邊環境與基坑內的部分梁和柱,以便之后的點云處理。預處理后的點云有15 589 178個點,文件容量約為0.49 GB,點云模型如圖6(d)所示。

表1 點云模型三維重建中各個GCP誤差Table 1 GCP errors in 3D reconstruction of point cloud model mm
本文首先手動分割了結構點云模型,把各個墻面的分類結果作為分割的真實點集,據此來分析算法自動分割的準確性。交并比(intersection over union,IoU)被用來作為分析各個平面的分割準確性的指標。第i面墻的分割交并比Ri與點云模型所有墻面的整體分割交并比R的計算公式分別為:
式中:Ai為第i面墻的真實點的集合;Bi為算法自動分割的第i面墻的點集合;n為點云模型的墻面數量。
2.2 算法處理
設置算法參數擬合閾值T=0.22 m,體素尺寸V=0.2 m,迭代次數K=50 000,E=1.2V,M=4,使用本文提出的融合降采樣,RANSAC 和DBSCAN 的算法處理基坑點云,得到點云模型所有墻面的整體分割交并比R為0.852,所分割的所有墻面點總數為10 572 564 個,效果圖如圖7(a)所示。由于基坑壁凹凸不平,分割時基坑壁上方橫梁和下方地面的部分點會和基坑壁分割到一起。此時,可根據結構平面點在各高度處的點密度對基坑壁精細分割。精細分割原理如圖8所示,基坑壁面上的點云較均勻,而橫梁和地面與基坑壁相接處會有較大的點云密度,發生點云密度突變。因此,根據點云沿高度方向的密度分割處理該基坑,得到最終的效果圖如圖7(b)所示,精細分割處理后,點云模型所有墻面的整體分割交并比R為0.889,比初始分割交并比提高了4.36%,所有墻面點總數為9 434 826 個,比初始分割的點數減少10.76%,精細分割剔除了橫梁與地面上的噪點,展示了完整的墻面。
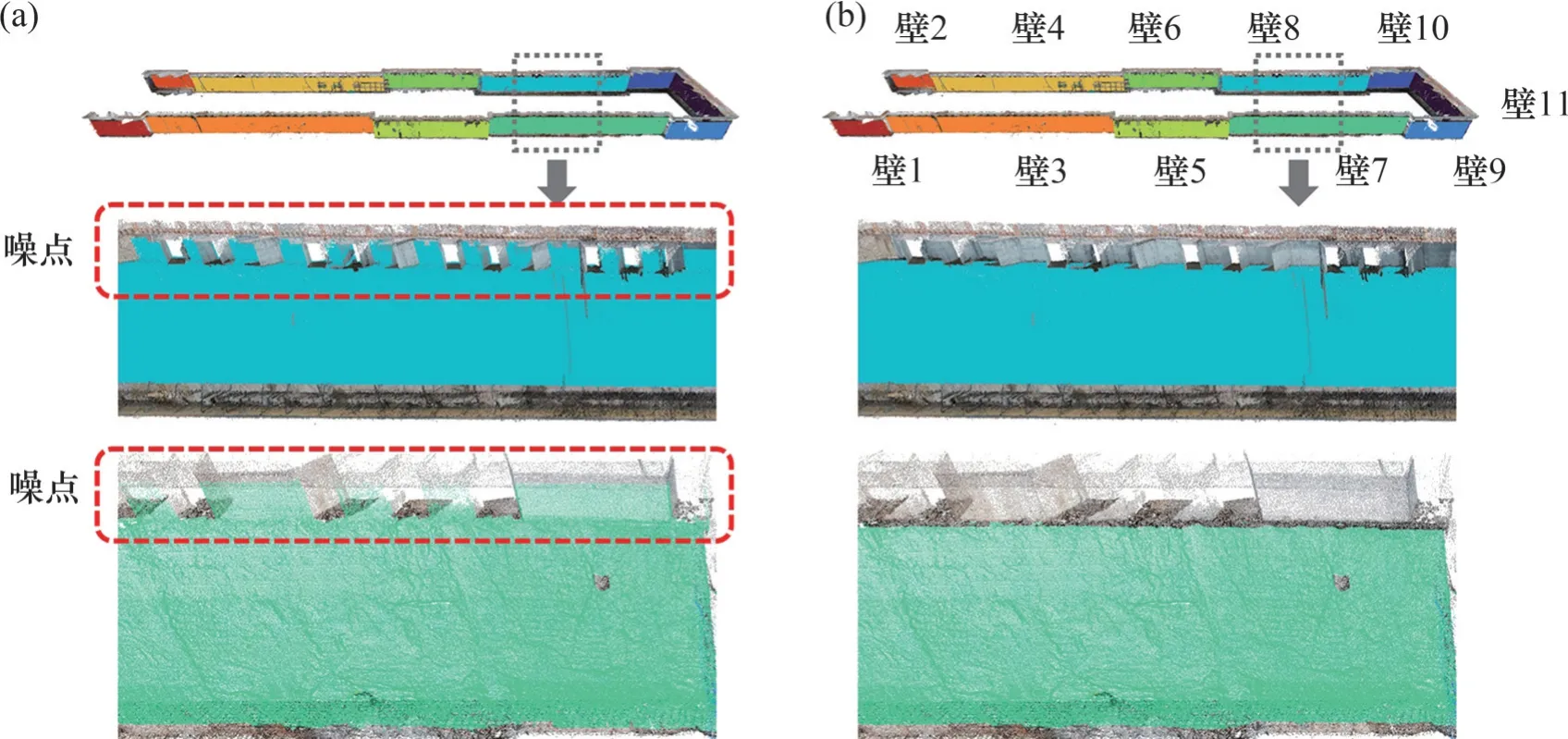
圖7 點云分割算法初始效果與精細分割效果對比Fig.7 Comparison of initial effect and fine segmentation effect of point cloud segmentation algorithm

圖8 基坑壁平面精細分割原理Fig.8 Principle of fine plane segmentation for foundation walls
各個基坑壁初始分割交并比與精細分割的分割交并比如表2所示。基坑壁的11個墻面中有6個墻面上存在橫梁與地面上的噪點。在精細處理后,各個墻面的分割交并比都超過0.7,其中基坑壁4獲得了最高的分割交并比為0.935。在精細分割處理后,基坑壁4 減少315 402 個噪點,占基坑壁初始分割點數的15.97%,其分割交并比相比初始分割交并比提升11.10%。部分基坑壁在初始分割之后沒有大量噪點,所以精細處理不會對這類基坑壁起作用。在精細處理之后,其他有噪點的基坑壁分割交并比至少提升4%,點數至少減少9%。因此,精細分割能有效提高基坑壁分割的準確性。

表2 點云分割算法初始效果與精細分割效果交并比Table 2 Intersection union ratio of initial effect and fine segmentation effect of point cloud segmentation algorithm
分割出該基坑的11 個基坑壁之后,根據本文提出的方法,對分割出的每個基坑壁按照式(1)和(2)設置垂直參考平面,可計算出基坑壁表面各點到各個參考平面的距離,如圖9(a)所示,其中正值代表基坑壁向基坑內部突出,負值代表基坑壁向基坑內部凹陷。從圖9可以看出,各基坑壁上的點距各參考平面的距離大多在-0.2~0.2 m之間,距參考平面最遠的點大多在各基坑壁的邊緣轉角處。為了更好地觀察每一個基坑壁的具體情況,本文提取了11 個基坑壁,如圖9(b)所示。單獨提取了每個基坑壁的點云模型并計算了其表面形狀。選擇了基坑壁4 中的區域A,基坑壁7 中的區域B,基坑壁11 中的區域C 分別如圖9(c),9(d)和9(e)所示。基坑壁點云的凹陷與突出在基坑壁表面形狀的計算中都得到了體現,證明了本文方法對基坑壁表面形狀計算的準確性。
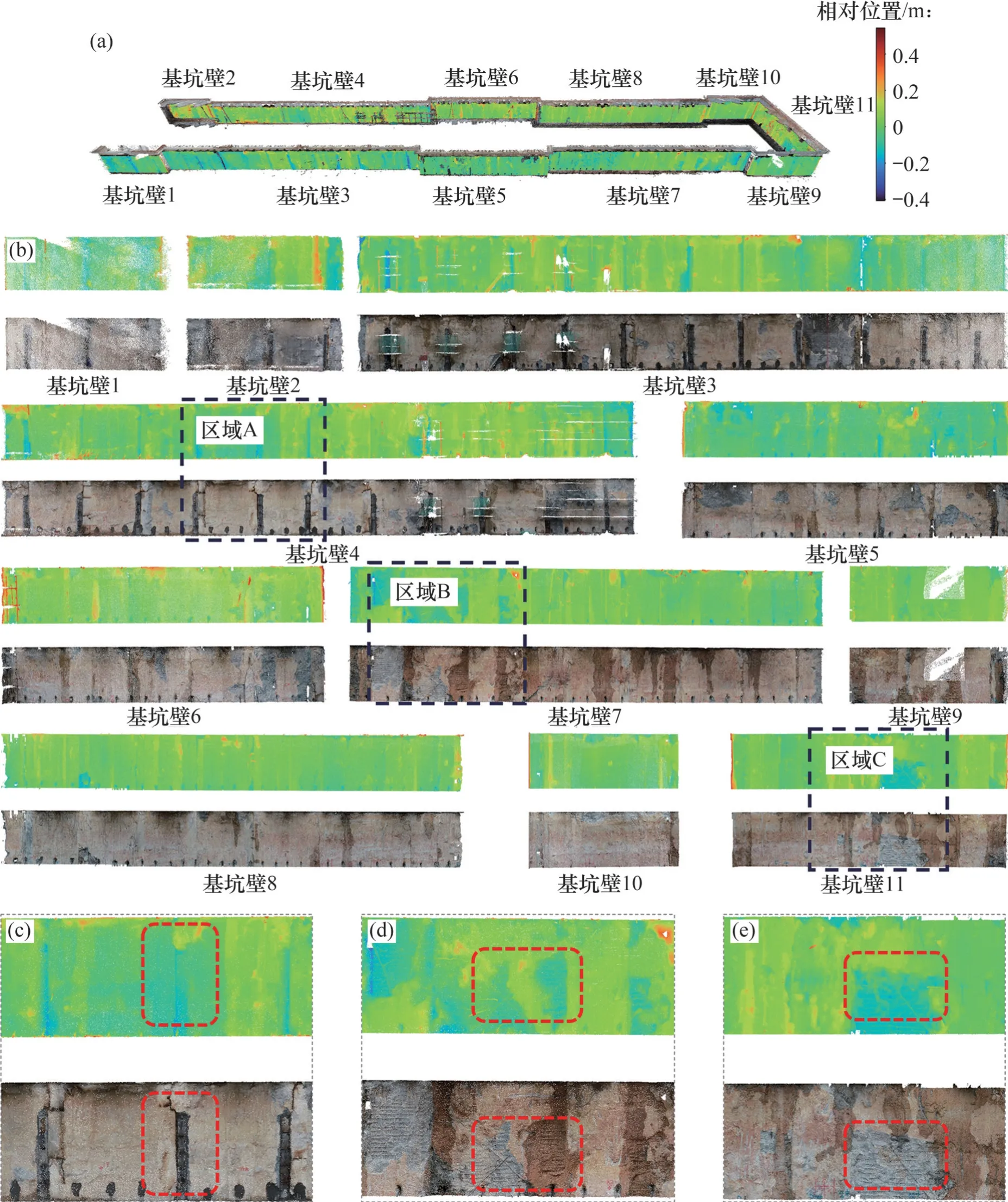
圖9 基坑壁表面測量效果整體及局部展示Fig.9 Overall and local display of surface measurement for foundation walls
3 參數分析
本文進一步對比算法關鍵參數對算法自動分割效果的影響。點云模型整體的分割交并比R主要受算法關鍵參數T,V和K的影響。算法參數T,V和K對分割效果的影響如圖10 所示,其中,控制算法參數V和K分別為0.2 m和50 000次。

圖10 不同算法參數對自動分割效果的影響Fig.10 Influence of different algorithm parameters on performance of automatic segmentation
1) 當算法參數T較小時,如0.07 m,會導致欠分割,基坑壁上有較多缺失,不能完整地分割出基坑壁,如圖10(a)所示,分割效果交并比R為0.701。
2) 當算法參數T較大時,如0.45 m,基坑壁不能被優先提取,以致基坑壁上下有較大區域的缺失,如圖10(c)所示,分割效果交并比R為0.797。
3) 只有當算法參數T適中時,如0.22 m,能夠有最優的分割交并比R為0.889,同時有最佳的分割效果,如圖10(b)所示。
圖11 所示為不同算法參數對自動分割交并比的影響。算法參數T代表了平面分割時的擬合閾值,由圖11(a)可見,當閾值在一定的合適范圍內(如0.13~0.32 m),算法分割的交并比R均超過0.840,即根據分割效果或者經驗選擇合適的算法參數T能夠獲得較好的分割效果。算法參數V反映了點云處理時模型的點密度,較大的密度意味著更多的信息和更多的計算時間。由圖11(b)可見:當點云密度足夠大(如V小于0.35 m)時,算法能夠獲得較好的分割交并比,R均大于0.880,更大密度的點云即更小的V不能明顯提高分割的精確性。由圖11(c)可見:當迭代次數夠大(如K大于10 000次)時,算法能夠獲得較大的分割交并比,R均大于0.875,更多的迭代次數對自動分割的交并比R提升有限。

圖11 不同算法參數對自動分割交并比的影響Fig.11 Influence of different algorithm parameters on intersection union ratio of automatic segmentation
4 結論
1) 以工程結構作為研究對象,引入機器學習方法,提出一種基于三維點云的結構平面快速分割及表面檢測方法,提升工程結構點云研究中平面分割的分析效率,實現工程結構點云模型的快速處理。
2) 針對某在建地鐵車站深基坑實例,實現了無人機圖像驅動的基坑整體點云高精度重建、點云模型基坑壁分割提取、基坑壁表面形狀識別和平面分割精確度分析。
3) 設計的算法效果主要受其參數影響。其中,算法參數T的影響最大,當T為0.22 m時有最佳的分割效果及最大的交并比,為0.889;更小的算法參數V和更大的算法參數K有利于算法的效果提升,但會消耗更多的計算時間。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
太空探索(2016年6期)2016-07-10 12:09:06
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
現代企業(2015年9期)2015-02-28 18:56:50