基于預測控制的垂直軸卸荷氣缸壓力調節
2023-08-17 01:33:54王翔齊恩兵房振勇
機床與液壓 2023年14期
王翔,齊恩兵,房振勇
(1.哈爾濱工業大學機電工程學院,黑龍江哈爾濱 150001;2.泰山學院機械與建筑工程學院,山東泰安 271000)
0 前言
對于大多數具有垂直軸系的超精密機床,為了提高運動平穩性及進行高精度的控制,一般會通過卸荷機構來平衡垂直軸系的重力[1]。而氣動系統因為具備成本低、無污染、應用范圍廣、可靠性高、使用壽命長等優點,廣泛應用于機械、自動控制等工業領域[2]。
目前關于垂直軸卸荷氣缸壓力調節的研究較少,王哲[3]通過模糊控制實現超精密機床卸荷機構的精密恒壓控制;日本的MIYATA、HANAFUSA[4]根據氣缸活塞的位移,通過壓力導數反饋補償法調節壓力增益。
相比而言,氣缸的位置控制研究較為成熟,加拿大的BONE、 CHEN[5]設計了一種新穎的離散值模型預測控制(DVMPC)算法,并將它用于氣動-電動混合執行器中氣動氣缸的位置控制;浙江大學的CHEN等[6]采用自適應魯棒神經網絡控制器實現氣缸的軌跡跟蹤控制,使氣缸的位置跟蹤控制具有更好的系統動態補償和魯棒性。
本文作者針對垂直軸卸荷氣缸的實際卸荷情況,明確其系統組成及工作原理,針對卸荷氣缸壓力補償系統的非線性問題建立T-S模糊模型;并基于模型的線性函數表達形式,運用DMC預測控制來降低系統時滯性,結合PID控制穩定系統;最后通過AMESim和Simulink進行聯合仿真,以驗證控制算法的合理性。
1 系統組成及原理
垂直軸卸荷氣缸壓力補償系統的示意如圖1所示,卸荷氣缸安裝在垂直軸頂部位置,氣缸活塞桿則通過柔性聯軸器與溜板相連接;通過卸荷氣缸壓力補償系統可以平衡垂直軸系運動部件的重力作用,提高主軸在垂直軸系運動的平穩性。
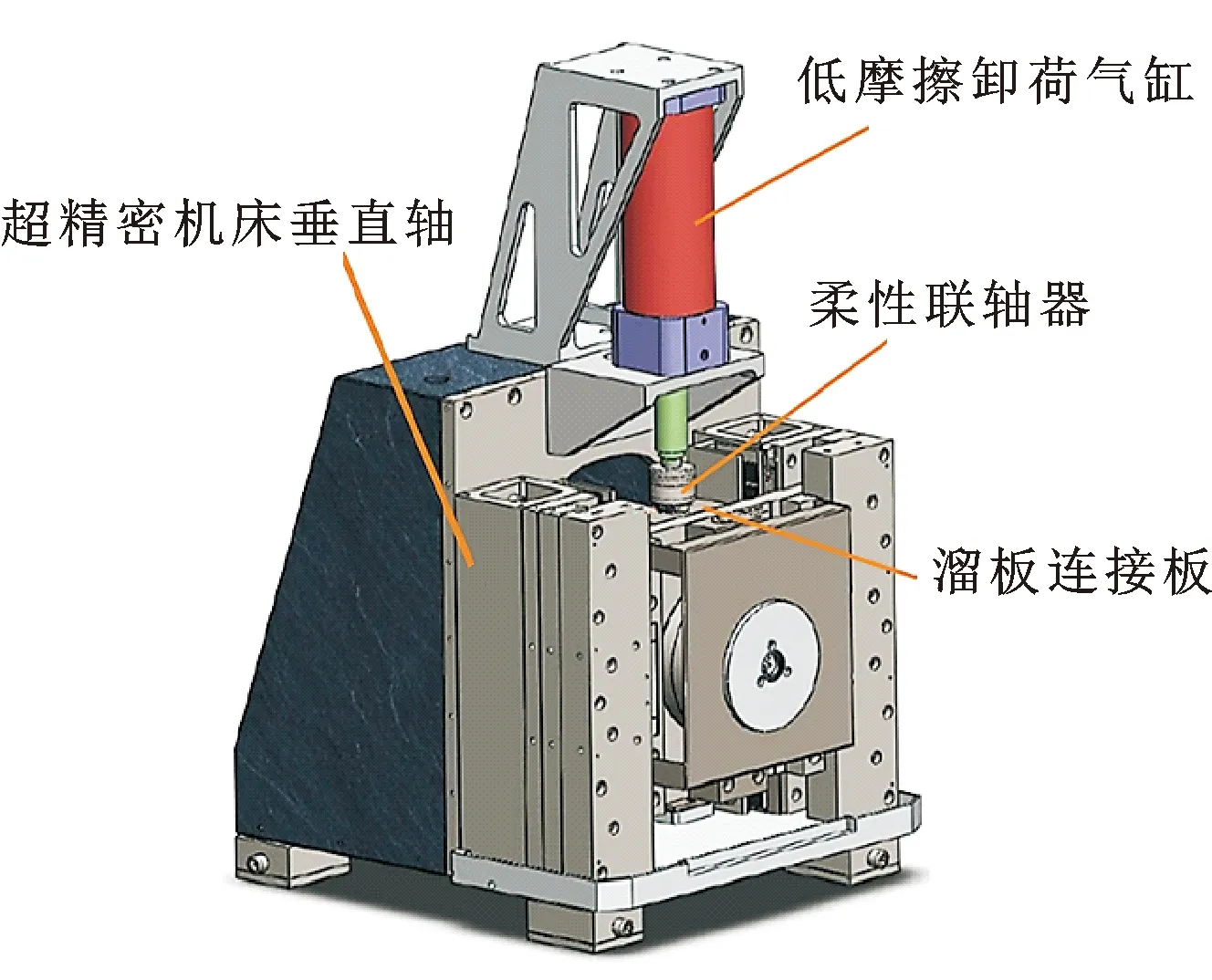
圖1 垂直軸卸荷系統示意
當垂直軸往復運動,大幅度慢溜板伺服動作時,此時卸荷氣缸的活塞跟隨溜板進行運動,導致卸荷氣缸氣腔內氣壓可能會發生突變,另外當主軸發生啟停及定位運動時,也會給卸荷系統帶來一定影響。因此卸荷氣缸壓力補償系統要在氣缸活塞發生移動的同時,提前進行合理的排放氣,避免壓力發生突變,給機床加工帶來影響。而考慮到垂直軸的運動由電機驅動,響應速度快,且卸荷氣缸因氣體的可壓縮性、黏滯性等問題[7],導致其響應速度要慢于垂直軸,且存在滯后性問題,因此卸荷氣缸壓力補償系統難以通過常規控制方式實現高精度壓力補償。
2 T-S模糊模型建立
垂直軸卸荷氣缸壓力調節系統依據垂直軸是否發生往復運動可以視作為多輸入單輸出模型,但其中非線性因素眾多,為了保證模型的準確性,同時考慮到具體的控制算法擬采用模糊控制,因此將通過建立T-S模糊模型來完成線性化處理。因為T-S模糊模型的后件形式為線性函數形式,正因如此不僅可以完成線性化處理,同時也免去了繁瑣的去模糊化過程。
T-S模糊模型系統的輸出可以表示為
(1)
其一般形式[8]為

(2)

完整的T-S模糊建模過程需要分別完成結構辨識以及參數辨識。易知卸荷氣缸的壓力與電氣比例閥開度以及卸荷氣缸上一時刻的壓力有關,因此文中選擇輸入變量為n時刻卸荷氣缸的卸荷壓力F(n),n時刻主軸的位移x(n),電氣比例閥的輸入電流I(n);輸出變量為n+1時刻卸荷氣缸的卸荷壓力F(n+1)。
通過FCM算法[9],完成T-S模糊模型的辨識工作,設初始聚類中心個數c=3,模糊系數m=2,經過反復迭代計算,發現聚類中心數量為4、模糊系數為3時效果最好,此時對應的T-S模糊模型隸屬度函數如圖2所示。
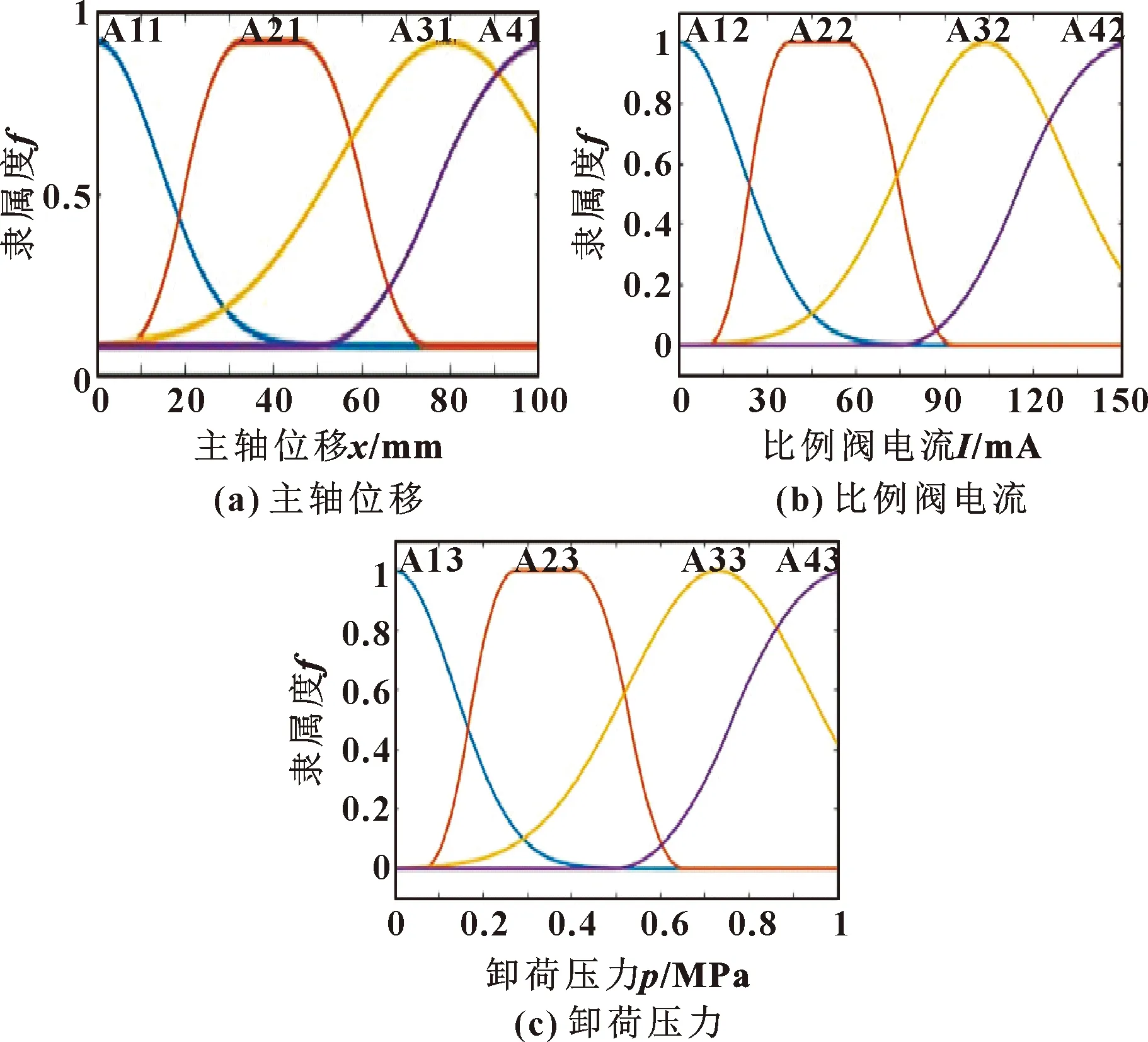
圖2 T-S模型隸屬度函數
此時輸入變量F(n)的語言變量集合為{A1,A2,A3,A4};輸入變量x(n)的語言變量集合為{B1,B2,B3,B4};輸入變量I(n)的語言變量集合為{C1,C2,C3,C4}。
通過遞推最小二乘法[8]完成后件參數的辨識,得到結論參數矩陣P,則系統的T-S模糊模型如下:
R1:ifF(n) isA1andx(n) isB1andI(n) isC1thenf1(x)=P10+P11x1+P12x2+P13x3
R2:ifF(n) isA2andx(n) isB2andI(n) isC2thenf2(x)=P20+P21x1+P22x2+P23x3
R3:ifF(n) isA3andx(n) isB3andI(n) isC3thenf3(x)=P30+P31x1+P32x2+P33x3
R4:ifF(n) isA4andx(n) isB4andI(n) isC4thenf4(x)=P40+P41x1+P42x2+P43x3
3 基于T-S模糊模型的DMC控制
為了解決垂直軸卸荷系統在實際應用中出現的壓力調節滯后性問題,文中引入預測控制來降低系統的時滯性,同時為了避免計算量過大,增強系統魯棒性,采用DMC預測控制[10]。
3.1 DMC控制
DMC控制是基于對輸入信號的階躍響應所實現的,其預測模型的控制機制為:在每一個循環采樣周期內,將通過采集獲得的當前測量值實時在線求解,再將該優化解的首個控制分量施加在系統中;然后在下個循環采樣周期中重復上述求解過程,最終通過多步預估來解決系統滯后性的問題[11]。DMC算法可通過簡單的實驗獲得預測模型;然后通過滾動式局部優化避免全局優化,簡化了相關運算步驟;同時可實時反饋實際輸出和模型輸出存在的模型誤差,對在控制過程中因產生外界干擾因素等原因造成的模型適配、系統振蕩等現象進行彌補[12]。
3.1.1 預測模型
預測模型的基本原理是根據實驗所得的相關壓力、位移數據,結合預期目標、數據輸入,通過相應計算,對氣缸下一時刻的壓力輸出作出預測,展示出氣缸下一時刻的動態行為。
該模型具體內容如下:首先給卸荷氣缸壓力補償系統輸入一個單位階躍信號,獲得相應的卸荷氣缸壓力階躍響應曲線,并選取合適的采樣時間T,獲取相對應T的離散采樣值{P1,P2,P3,…,Pn}作為模型的動態系數。通過該動態系數以及輸入參數可對該模型的輸入輸出關系進行描述。
當在n時刻以一個控制量ΔI(n)作為輸入,且該輸入信號在一定時間內維持不變,則可以對后續N個時刻的系統輸出做出如下預測:
Pm(n+1)=P0(n+1)+a1ΔI(n)
Pm(n+2)=P0(n+2)+a2ΔI(n)
?
Pm(n+N)=P0(n+N)+aNΔI(n)
(3)
若施加的控制量ΔU(n)在后續的采樣間隔內發生變化,則未來N個時刻的模型輸出預測值如下:
Ym(n+1)=Y0(n+1)+AΔU(n)
(4)
式中:矩陣A即為動態矩陣,矩陣中參數均可通過系統的階躍響應曲線得到,是一個P×M維矩陣。
3.1.2 滾動優化
滾動優化過程中所采用的控制增量通過獲取目標函數的極小值來計算求取,這里通過采取二次型性能指標計算[13]。
(5)
3.1.3 反饋校正
卸荷氣缸壓力補償系統實際運行過程中,由于外界干擾信號、系統時變特性、模型不完全匹配等問題會導致預測模型的輸出預測值與真實值存在一定誤差,當誤差過大且不能及時校正,優化環節將沒有意義,因此在線反饋校正環節必不可少[14]。實時校正便是根據預測模型,滾動優化推得系統在未來時刻預測值Ym(k)后與實際采集得到的系統輸出y(k)進行差值運算:
e(k+1)=y(k+1)-Ym(k+1)
(6)
接著通過施加校正向量h實現滾動優化來對未來時刻預測值進行修正:
YP(k+1)=Ym(k+1)+he(k+1)
(7)
式中:h為校正向量,h=[h1,h2,…,hn]T。
初始預測值通過移位矩陣s可求得,即:
YP(k+2)=s·YP(k+1)
(8)
3.2 基于T-S模糊模型的DMC控制器設計
DMC預測控制算法能夠有效運行的基礎是獲得線性系統階躍響應的模型向量,而卸荷氣缸壓力補償系統則是典型的非線性系統,因此為了避免模型失配,需要結合前文所建立的T-S模糊模型,完成線性化處理,再通過DMC預測控制算法得到最優的比例閥控制電壓信號,基于T-S模糊模型的DMC預測控制系統的結構如圖3所示。

圖3 基于T-S模糊模型的DMC預測控制結構
根據采樣獲得卸荷氣缸當前時刻卸荷壓力、活塞的位移及其變化率,結合前文所建立的T-S模糊模型,對應規則庫,輸出階躍響應模型,得到對應的模型向量,并根據模型向量確定DMC預測控制器的相關控制系統參數,從而完成對應預測壓力的計算,調節比例閥電壓的輸出。即通過T-S模糊模型解決了卸荷氣缸壓力補償系統的非線性問題,又將部分模型參數的在線辨識工作通過T-S模糊模型的建立事先離線完成辨識計算,在一定程度上減少了預測控制的在線計算量,進一步降低了系統的時滯性,提高了系統的響應速度。
4 仿真驗證及分析
為驗證設計的基于T-S模糊模型的DMC預測控制的合理性及有效性,利用Simulink搭建DMC-PID串級控制器,通過AMESim搭建垂直軸卸荷氣缸壓力調節仿真系統,如圖4及圖5所示。卸荷氣缸壓力調節仿真系統的部分參數如表1所示。
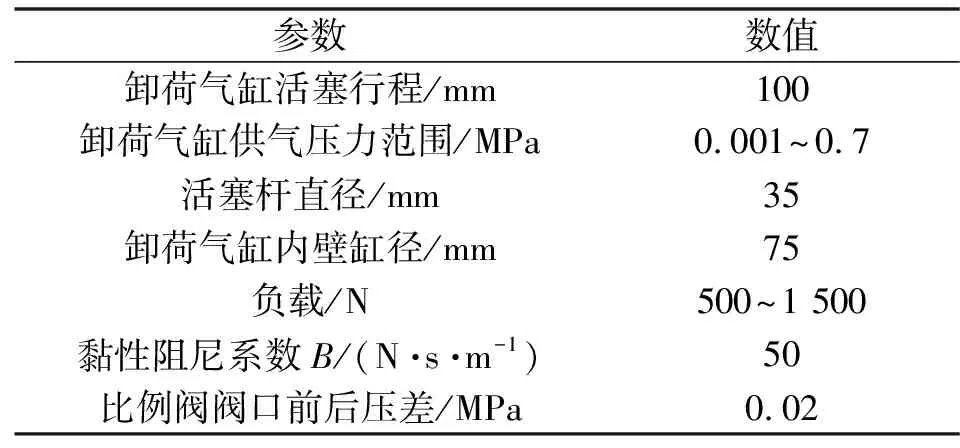
表1 技術參數
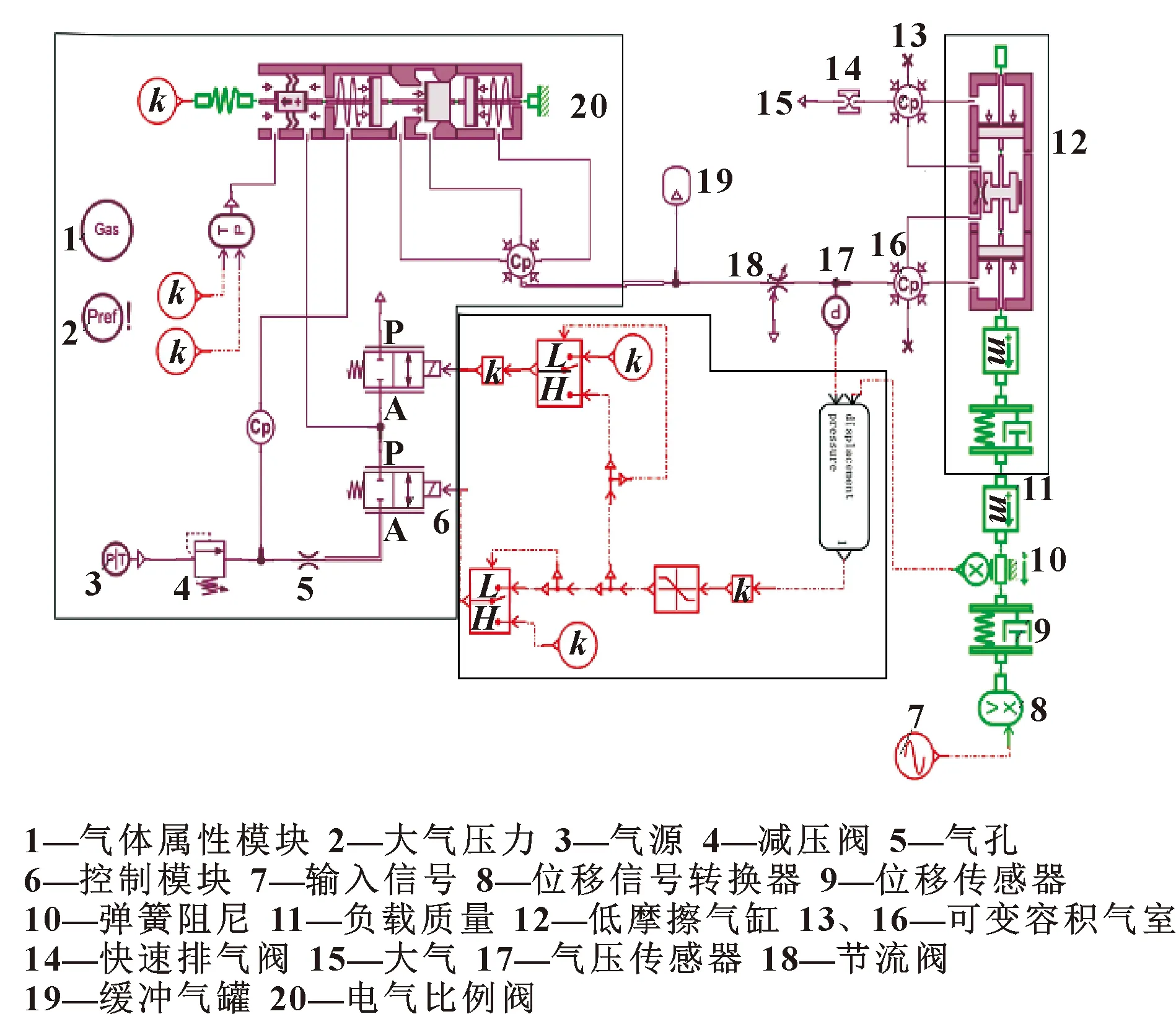
圖4 卸荷氣缸壓力控制AMESim仿真模型

圖5 卸荷氣缸壓力控制Simulink仿真模型
首先進行穩壓控制時的跟蹤分析,此時垂直軸無運動,依據設計要求,主軸要求的卸荷500~1 500 N,換算為0.13~0.43 MPa,故在仿真實驗時設定氣源壓力為1 MPa,減壓閥壓降0.5 MPa,卸荷氣缸下面負載為1 000 N,壓力的跟蹤效果如圖6所示。可以發現:進行穩壓控制時,在仿真開始階段,即前2 s時間內,卸荷氣缸由于需要進行充氣,系統還未穩定,存在一定初始誤差,此時壓力跟蹤誤差不夠理想,輸出卸荷氣壓在0.347 3~0.352 8 MPa內波動,最大跟蹤壓力誤差則達到0.008 MPa;而當2 s后,系統進入穩定狀態后,卸荷氣壓的跟隨情況趨于穩定,此時最大的跟隨誤差為0.001 8 MPa,卸荷氣壓的波動小于0.5%。
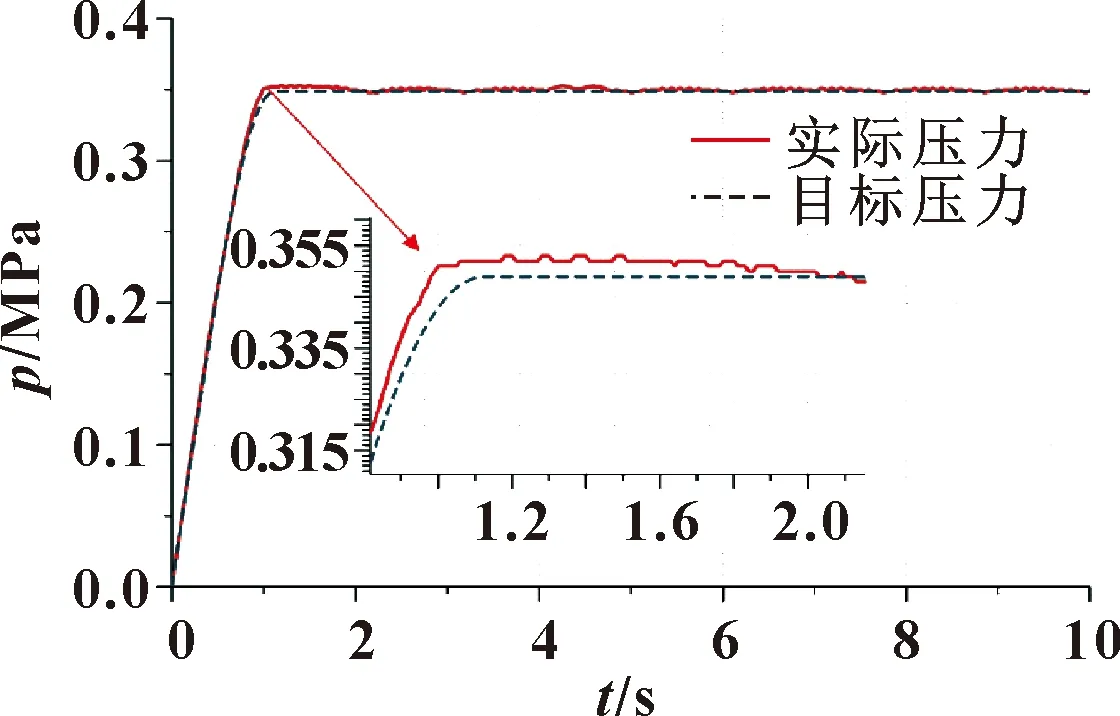
圖6 主軸穩定時的氣壓跟蹤曲線
接著進行跟隨補償控制的跟蹤分析。當垂直軸以1 Hz頻率進行正弦運動時,系統其他參數維持不變,此時卸荷氣缸卸荷壓力的跟蹤效果及此時卸荷氣缸活塞的位移跟隨效果分別如圖7及圖8所示。可以發現:在仿真開始階段,氣缸由于需要充氣的原因,此時卸荷壓力不會對活塞移動造成影響,此時位移跟蹤效果良好,活塞跟隨垂直軸運動;但隨著充氣完成,系統穩定后,由于氣動控制的滯后性無法完全消除,此時實際卸荷壓力略大于理想壓力,且存在一定滯后性,壓力最大跟隨誤差出現在4.4 s時,為0.027 MPa,給卸荷氣缸活塞的位移帶來了一定影響,使其出現一定波動,在2.8 s時卸荷氣缸活塞位移的跟蹤誤差達到最大為4.2 mm。而經過DMC預測控制對壓力的補償,最終在5 s時,壓力跟蹤誤差降到0.001 MPa。不過在8 s后,由于預測控制算法精度以及誤差累積等問題的影響,壓力出現了過度補償的現象。后續可根據實驗結果,通過對控制器參數特別是模型向量的適當調整繼續改善控制精度。
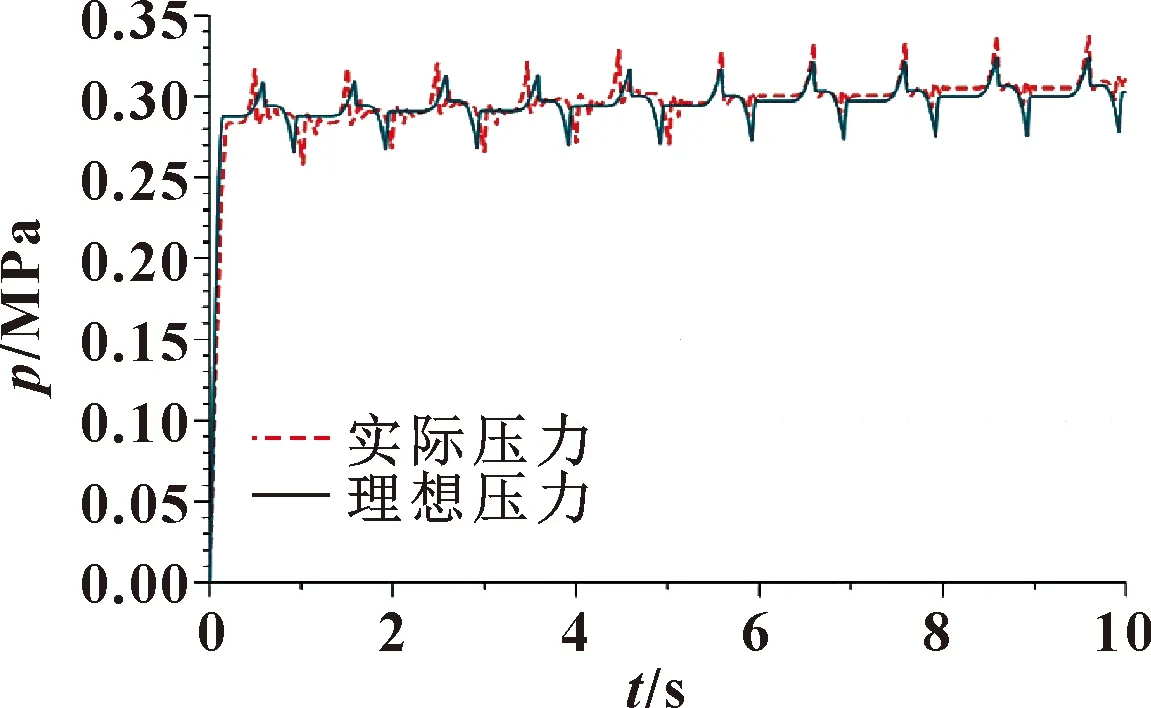
圖7 主軸正弦運動時氣壓跟蹤曲線
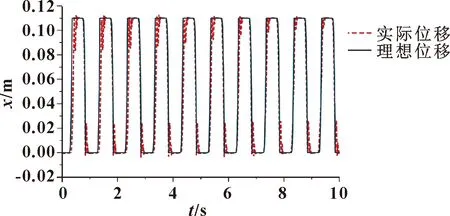
圖8 主軸正弦運動時位移跟蹤曲線
5 結論
針對垂直軸卸荷氣缸壓力調節系統,設計了DMC-PID串級控制方案,分析垂直軸系統組成及跟蹤原理后,建立了卸荷系統的T-S模糊模型,利用其線性函數形式的后件表達完成了線性化處理,基于T-S模型設計了DMC-PID串級控制方案,并進行了仿真分析,研究了卸荷氣缸壓力及活塞位移的跟蹤曲線,得出以下結論:
(1)當垂直軸未進行運動時,基于T-S模糊模型的DMC-PID串級控制策略能夠有效進行穩壓控制,降低壓力的波動。
(2)當垂直軸系進行正弦運動時,基于T-S模糊模型的DMC-PID串級控制策略能夠有效地降低時滯性,并進行自我修正調節,表明了DMC-PID串級控制策略對于垂直軸卸荷氣缸壓力調節是可取的。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
