滾珠絲杠式燃氣舵結構仿真與運動控制
2023-09-05 01:19:38劉靜怡魏巖淞
振動與沖擊 2023年16期
關鍵詞:系統
劉靜怡, 鄭 健, 魏巖淞
(1. 南京理工大學 機械工程學院,南京 210094;2. 空間電子信息技術研究院,西安 710000)
燃氣舵作為導彈實現大攻角推力矢量控制的關鍵機構,能夠實現俯仰、偏航、滾轉三個方向的控制[1]。由于電動舵機具有可靠性高、使用維護簡便,制造、裝調難度較低等優點,現有的燃氣舵舵機系統通常采用電動舵機[2],電動舵機系統主要由電機、減速傳動機構、基座、舵片組成。舵機的輸出位置精度會直接影響產生的氣動力和氣動力矩,從而影響彈體上固體火箭發動機所獲得側向力的大小和彈體的航向校正,因此需要對舵機的運動實現精確控制,保證燃氣舵的矢量控制性能和導彈的機動性能。舵機系統工作啟動瞬間,由于舵片的氣動力加載和電機的啟動加速度,傳動機構會受到很大的沖擊力,極大地影響了機械結構的可靠性,因此需要對舵機系統啟動瞬間傳動機構的動力學相應展開研究。
研究結構在動態載荷作用下所表現的動態特性與動態響應屬于結構動力學研究內容。結構動力學問題有兩個重要特點[3]:第一個是動態載荷及其結構的響應隨時間變化,分析者要相應于響應歷程在所有感興趣的時間內求得響應解;第二個更為重要的特點是加速度在分析中占據重要作用,加速度引起結構的分布慣性力,通常慣性力表示為與結構內彈性力相平衡的總載荷的一個重要組成部分,因而在求解動力學問題時,必須考慮慣性力的作用,只有在結構運動非常緩慢、運動慣性力非常小時才可忽略不計。
倪迎鴿等[4]將有理函數近似導出的折疊運動中的非定常氣動力引入到動力學控制方程中,獲得了機翼折疊運動中在時變氣動力作用下的瞬態動力學響應。李彪等[5]基于非線性分析軟件ABAQUS對微小型衛星的捕獲帽結構及其固定形式展開沖擊動力學特性研究,定位解鎖裝置薄弱環節并驗證。周軍等[6]提出了一種基于ADAMS自定義函數的發射動力學仿真方法,使火炮發射時的內彈道過程與制退后坐運動同時在ADAMS 軟件內部進行動力學求解。
本文針對所設計的滾珠絲杠式燃氣舵展開研究,采用ADAMS對傳動機構進行運動學仿真和多剛體系統動力學仿真,分析在不同啟動響應時間下零件的接觸力,并根據ADAMS分析結果在ANSYS軟件中對危險零件進行瞬態動力學分析,得到其動應力響應。最后基于運動學仿真結果,針對燃氣舵的單片舵舵偏裝置進行硬件控制平臺設計與搭建,采用MATLAB Simulink仿真和試驗驗證實現對舵片運動的閉環比例-積分-微分(proportional-integral-derivative,PID)控制。
1 燃氣舵結構建模與仿真
1.1 燃氣舵結構與傳動機構簡化建模
本文設計的燃氣舵舵機系統采用滾珠絲杠式傳動機構,具體設計圖如圖1所示。舵片呈十字型布局,四組相互獨立的傳動機構靈活操縱舵片偏轉,從而調整導彈的飛行姿態。其中滾珠絲杠的直徑為8 mm,螺距為2 mm,行程約為12 mm。伺服電機通過聯軸器與滾珠絲杠相連,滾珠絲杠將旋轉運動轉化為絲杠螺母的直線運動,絲杠螺母通過滑塊與撥叉機構剛性連接,帶動舵片偏轉。與傳統的齒輪傳動機構相比,滾珠絲杠式傳動機構間隙小、軸向剛度高,具有更高的控制精度,且將滑動摩擦變為滾動摩擦,摩擦損耗小,極大地提高了系統的工作效率[7]。
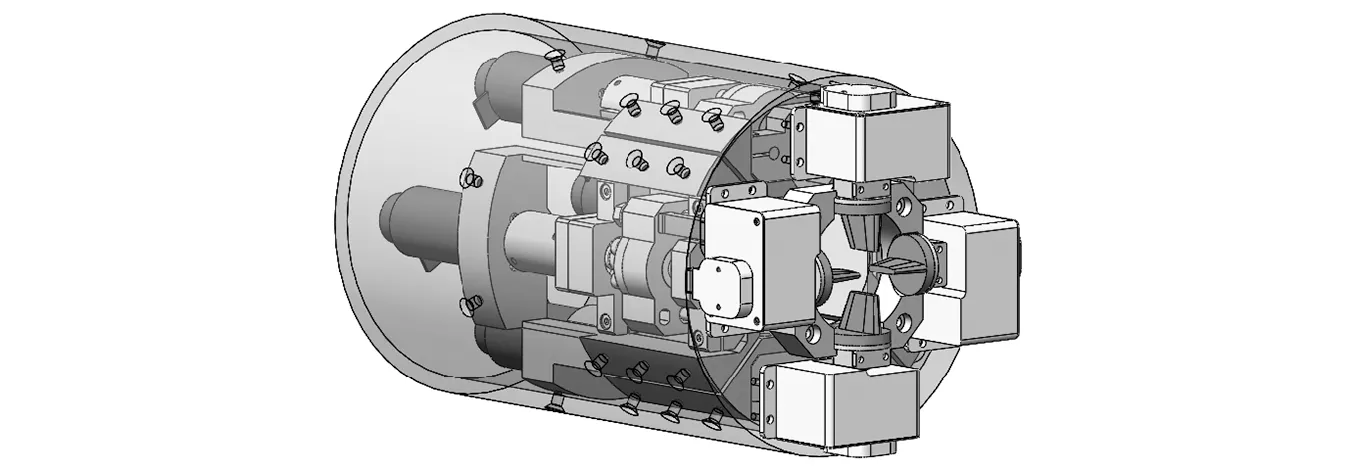
圖1 滾珠絲杠式燃氣舵舵機Fig.1 Ball screw gas rudder actuator
為了研究舵機系統傳動機構在啟動瞬間受到的沖擊力,需要在ADAMS中對傳動系統進行動力學分析,首先對滾珠絲杠式傳動機構進行簡化建模,簡化后的傳動機構包括滾珠絲杠、固定座、支撐座、第一導軌、第二導軌、滑塊、作動桿、銷軸、撥叉和舵片。ADAMS中簡化后的模型如圖2所示。其中固定座、支撐座和滑塊的材料為鋁合金,其余零件的材料為鋼。
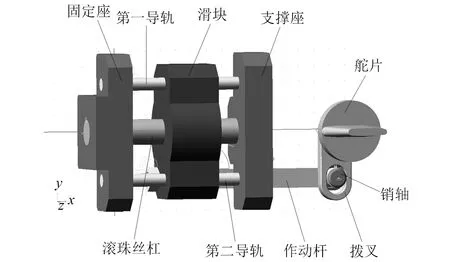
圖2 傳動機構簡化模型Fig.2 Simplified model of transmission mechanism
1.2 燃氣舵減速傳動機構動力學分析
在燃氣舵舵機系統沖擊過程中,結構與載荷互相耦合,傳動系統各零件間作用的載荷隨時間和結構變形而變化。ADAMS通過CONTACT定義沖擊模型,利用 Impact 沖擊函數來計算構件的沖擊載荷,該函數主要兩部分組成,一個是由于兩構建相互切入而產生的彈性力;另一個是由相對速度產生的阻尼力。當兩構件連續接觸時,系統將接觸定義為非線性彈簧模型,構件材料的彈性模量相當于彈簧的剛度,阻尼即為能量損失[8]。使用Impact函數時需要輸入剛度系數、力的非線性指數、最大黏滯阻尼系數、最大阻尼時構件變形深度。根據Hertz接觸理論[9],等效剛度K的計算公式如下
(1)
式中:R1,R2分別為碰撞點處兩物體的曲率半徑;σ1,σ2為材料的相關參數,其計算式為
(2)
式中:νI為材料的泊松比;EI為材料的彈性模量。
阻尼系數D與最大阻尼時構件變形深度δ的關系可表示為
D=χδn
(3)
式中,χ為滯后阻尼因子,可表示為
(4)

在燃氣舵舵機系統啟動瞬間,除了沖擊力,舵片還承受較大的空氣動力載荷,即鉸鏈力矩[10]。由于舵片正轉和反轉時工作情況對稱,故本文針對舵片正轉展開研究。由Fluent軟件對本文舵片的三維流場進行仿真分析,給定入口邊界條件為:總壓條件為6 MPa、總溫條件為300 K,對應的質量流率為0.353 6 kg/s;出口邊界為壓力出口,出口反壓1.01×105Pa,溫度300 K;壁面為無滑移絕熱壁;湍流模型選用單方程SA (spalart-allmaras) 模型。得到舵片受到的鉸鏈力矩如表1所示。
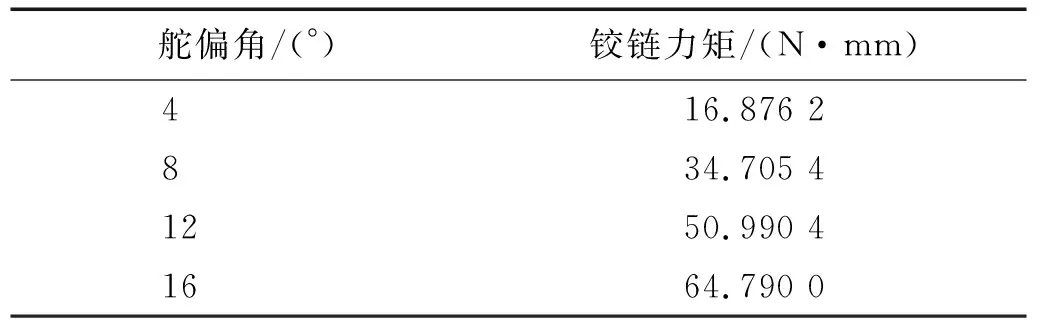
表1 不同工況下舵片的鉸鏈力矩Tab.1 Hinge moment of rudder blade under different working conditions
對表1中數據用多項式擬合得到鉸鏈力矩和舵偏角的關系如下
f(x)=0.034 08x2-4.636x+0.337 6
(5)
將上述關系寫入ADAMS的函數編輯器中將鉸鏈力矩施加在舵片上,并通過step函數對滑塊的位移進行控制,使舵片從0°偏轉到20°,對舵片施加的鉸鏈力矩如圖3所示。

圖3 舵片的鉸鏈力矩Fig.3 Hinge moment of rudder blade
啟動響應時間分別為0.05 s,0.10 s,0.15 s時,對傳動機構展開動力學分析。設置仿真時間為0.2 s,步數為100。仿真得到滑塊的速度和加速度分別如圖4和圖5所示,滑塊的驅動力如圖6所示,各相鄰零件的接觸力如圖7所示。
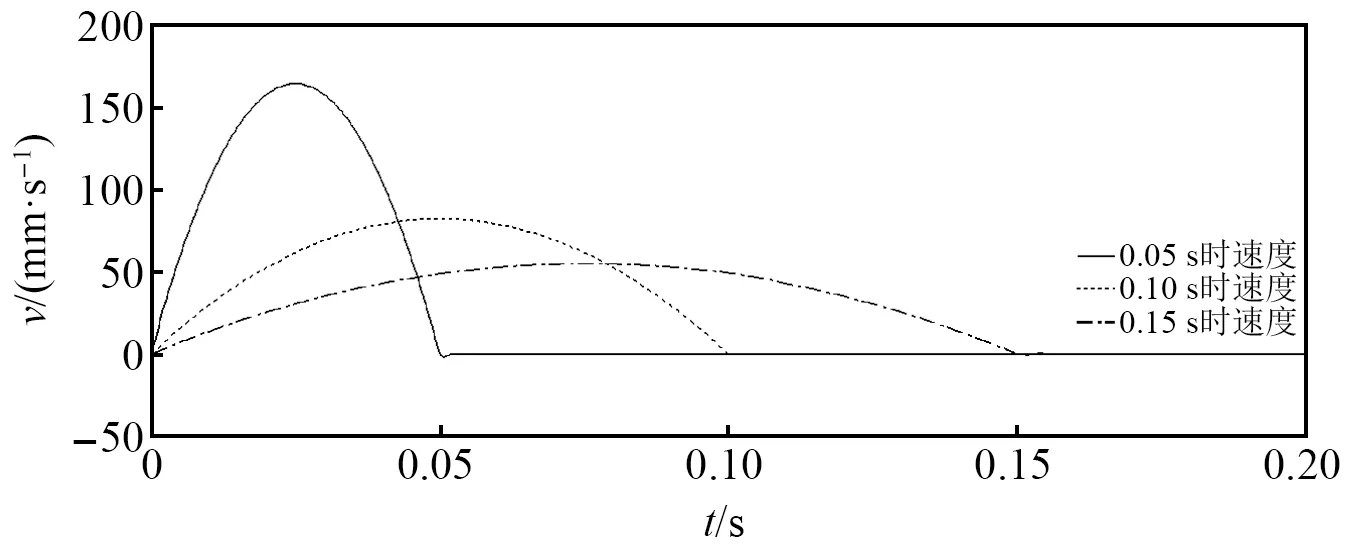
圖4 不同響應時間下滑塊的速度Fig.4 The speed of the slider at different response times
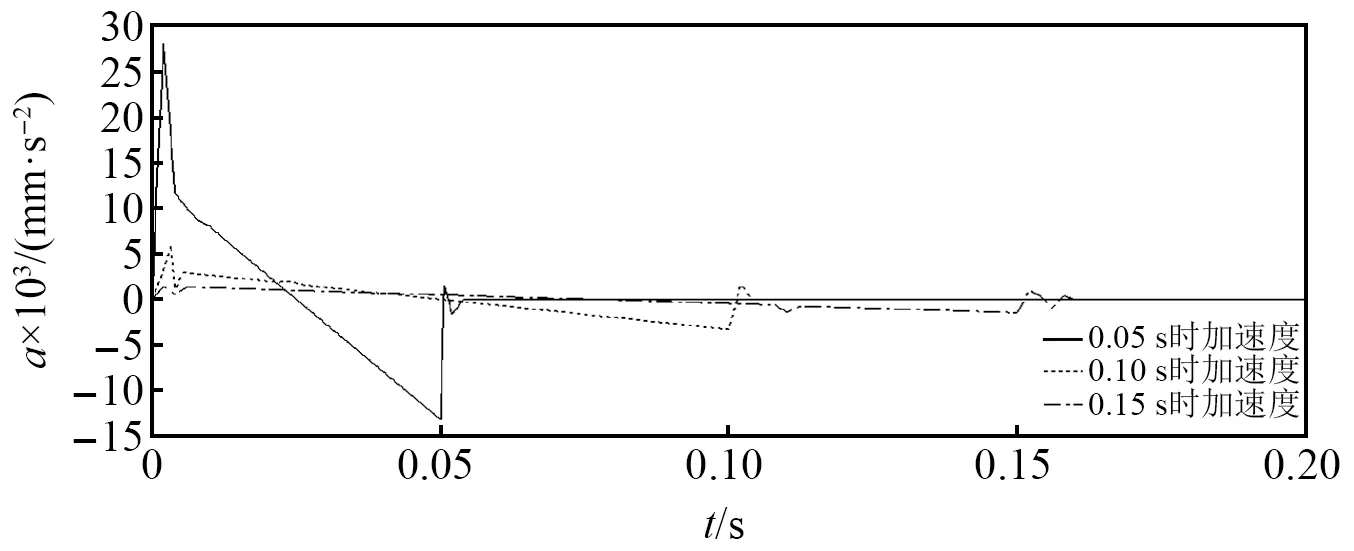
圖5 不同響應時間下滑塊的加速度Fig.5 The acceleration of the slider at different response times

圖6 不同響應時間下滑塊的驅動力Fig.6 The driving force of the slider at different response times
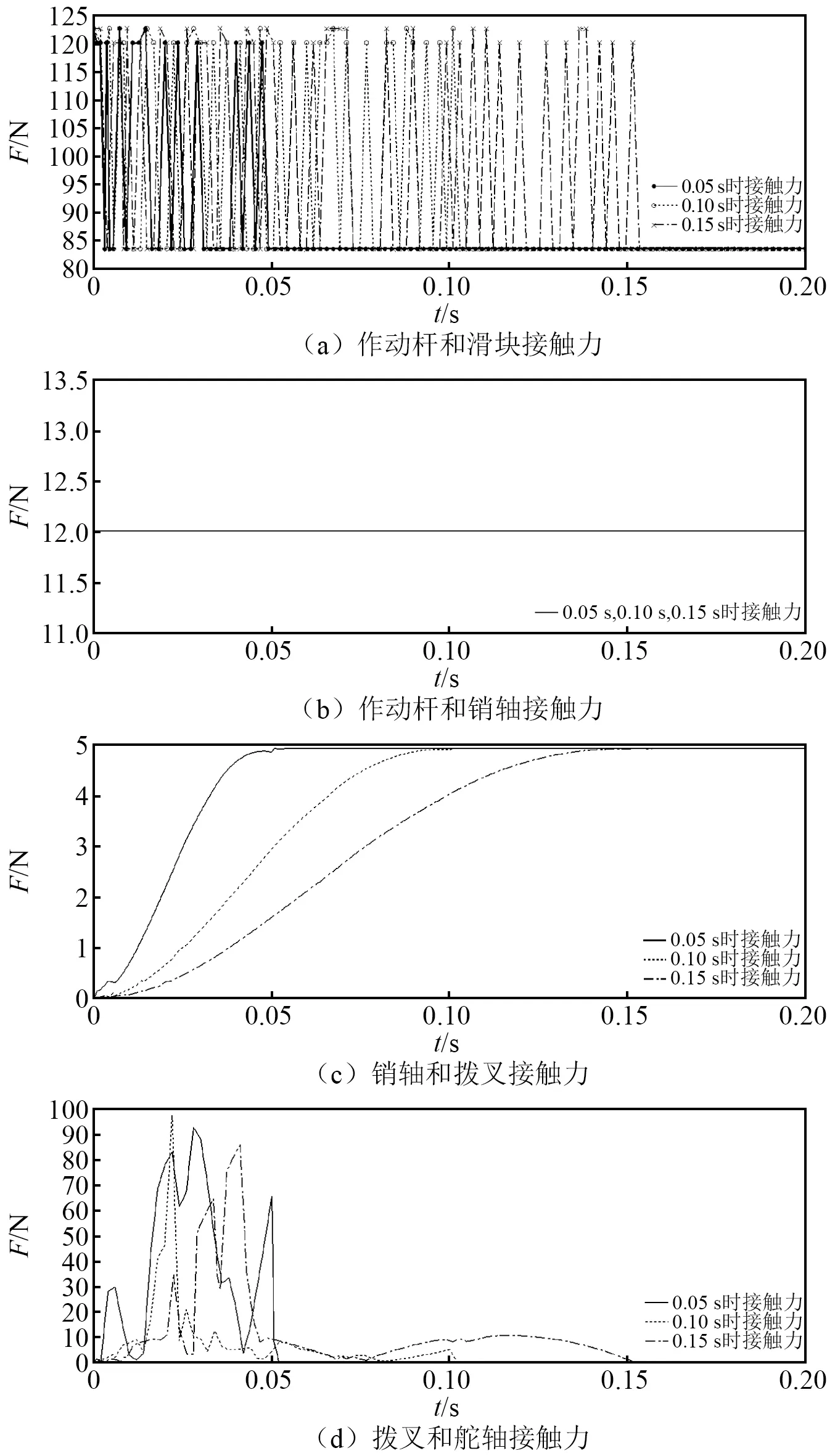
圖7 不同響應時間下相鄰零件的接觸力Fig.7 Contact force of adjacent parts under different response times
由圖4~圖6可知,驅動力曲線的突變點對應加速度曲線的突變點,啟動結束后,驅動力均穩定在4.64 N。當響應時間分別為0.05 s,0.10 s,0.15 s時,滑塊的最大速度分別達到165 mm/s,83 mm/s,55 mm/s;最大加速度分別達到28 051 mm/s2,5 949 mm/s2,1 439 mm/s2。
電機與滑塊的速度和加速度存在如下關系
(6)
(7)
式中:nmotor為電機轉速;vb為滑塊速度;Ph為滾珠絲杠導程;αmotor為電機加速度;ab為滑塊加速度。
相應地,電機的最大轉速分別為4 950 r/min,2 490 r/min,1 650 r/min,最大加速度分別為8.415 3×105r/min/s,1.784 7×105r/min/s,4.317 0×104r/min/s。
當響應時間分別為0.05 s,0.10 s,0.15 s時,響應時間不同,各接觸力隨響應時間的增加響應速度變慢,但各接觸力的最大值和最小值分別基本保持一致。
作動桿和滑塊、撥叉和舵軸的接觸力振動明顯,作動桿和銷軸、銷軸和撥叉的接觸力曲線平滑,分析是因為作動桿和滑塊、撥叉和舵軸均為固定連接;而作動桿和銷軸、銷軸和撥叉之間存在相對位移,摩擦力占據接觸力的較大比重。
作動桿和滑塊的接觸力在啟動時約為122.78 N,即為最大值,在響應時間內有較大振蕩,響應時間越快頻率越高,但振幅無明顯變化,響應結束后穩定在82.52 N,也即最小值。作動桿和銷軸的接觸力約為12.02 N,在啟動和穩定后無明顯變化。銷軸和撥叉的接觸力在啟動后和接近穩定時存在小幅抖動,最終穩定在4.95 N。撥叉和舵軸的接觸力在響應時間的前一半振動明顯,在響應時間的后一半趨于穩定,且響應時間越快振動越明顯,最大值約為95 N。
1.3 危險零件瞬態動力學分析
根據接觸力分析情況,認為作動桿為危險零件。將ADAMS中得到的時間函數的載荷輸入ANSYS Workbench進行瞬態動力學分析,可以得到危險零件的動力響應。本文采用Newmark時間積分法分析求解燃氣舵傳動機構危險零件的瞬態動力學特性。
設置仿真時間為0.2 s,步數為100步,以響應時間0.1 s為例,得到危險零件的應力云圖,提取每個載荷步的最大應力值,得到危險零件最大動應力隨時間的變化圖,如圖8所示,并通過提取每個載荷步的燃氣舵最大變形值,得到最大變形量曲線。

圖8 0.10 s響應時間下作動桿最大應力曲線Fig.8 Maximum stress curve of actuating rod under 0.10 s response time
作動桿的最大應力振蕩明顯,隨著時間的增加呈衰減趨勢,最大應力出現在0.006 s,約為31.561 MPa,最終收斂于27.5 MPa左右,整體遠小于鋼的屈服極限250 MPa,故作動桿的強度滿足設計要求。圖9為應力最大時作動桿的應力云圖。由圖9可知,作動桿在凸臺處存在輕微應力集中,此結構已設置圓角減小應力集中,足以達到良好的使用效果。作動桿的最大變形曲線與最大應力曲線趨勢相同,最大變形也出現在0.006 s,約為24.469 μm,相對于作動桿的整體尺寸而言極為微小,可知該傳動機構具有良好的尺寸穩定性。

圖9 0.10 s響應時間下t=0.006 s作動桿應力云圖Fig.9 Stress cloud diagram of actuating rod at t=0.006 s under 0.10 s response time
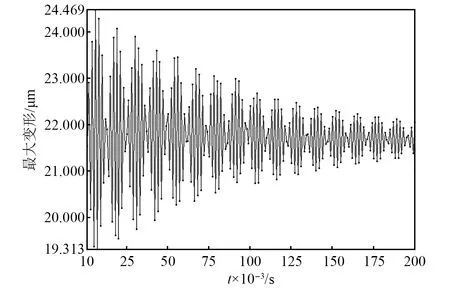
圖10 0.10 s響應時間下作動桿最大變形量曲線Fig.10 The maximum deformation curve of the actuating rod under 0.10 s response time
2 燃氣舵控制平臺設計
2.1 舵機系統控制原理
確定結構設計可行后,針對燃氣舵單片舵舵偏系統進行控制平臺設計,實現對單片舵的運動控制。燃氣舵電動舵機系統閉環控制原理圖,如圖11所示。將角度指令發送至控制器中,通過某種控制算法作用于伺服電機,驅動伺服電機偏轉相應的角度,并通過傳動機構控制舵片偏轉,利用角度反饋裝置實時檢測舵片的位置,且將實際角度反饋至控制器,實現系統的閉環控制。
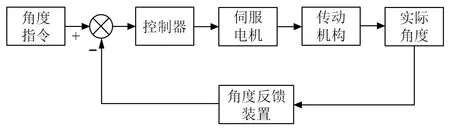
圖11 燃氣舵電動舵機系統閉環控制原理圖Fig.11 Schematic diagram of closed-loop control of gas rudder electro-mechanical actuator system
PID控制通過控制誤差值的比例、積分、微分來控制被控量,作為最早發展起來的控制策略之一,PID由于其算法簡單、魯棒性好和可靠性高,被廣泛應用于工業過程控制,至今仍然是最常使用的控制算法之一。本文采用PID算法實現對舵片運動的閉環控制,驅動器采用無刷直流伺服電機,角度反饋裝置選用旋轉編碼器。
2.2 舵機系統數學模型
利用MATLAB的System Identification工具箱辨識無刷直流電機的數學模型。辨識是指基于一個系統的輸入輸出數據,從一組給定的模型類中,確定一個與所測系統等價的模型[11]。System Identification的辨識計算過程是一個模型參數迭代的過程,方法包括最大似然、預測誤差最小化 (prediction error minimization,PEM) 和子空間系統辨識。工具箱可以使用時域和頻域輸入-輸出數據來辨識連續時間或離散時間模型,如傳遞函數、過程模型和狀態空間模型等線性系統辨識;對于非線性系統動態特性辨識,可以使用Hammerstein-Weiner模型和NARX模型,NARX指由外部輸入的非線性自回歸模型,包括小波網絡、樹分類、sigmoid 網絡等。對于系統的機理不是完全未知的情況,可以利用已有的理論定義含參的模型框架,然后通過灰盒方法進行模型參數辨識。
已知無刷直流電機可等效為二階系統。采集500組電機開環控制的輸入輸出數據作為樣本,在工具箱中選擇傳遞函數辨識。連續時間下,單輸入單輸出系統(single-input single-output,SISO)傳遞函數模型的表達形式為
Y(s)=G(s)U(s)+E(s)
(8)
(9)
式中:Y(s),U(s)和E(s)分別為輸出、輸入和噪聲的拉普拉斯變換;G(s)為輸入和輸出之間的關系; num(s)和den(s)分別為分子和分母多項式。
工具箱分別嘗試IV,SVF,N4SID,GPMF算法初始化分子分母參數值,且自動選擇預測誤差范數最小的方法。最終得到本文無刷直流伺服電機的傳遞函數如下
(10)
滾珠絲杠式傳動機構的工作原理,如圖12所示。以絲杠螺母向右運動為正方向,此時撥叉向右擺動,令電機偏轉的角度為θmotor,舵片偏轉角度為θ,撥叉的擺動半徑為L,絲杠導程為Ph,由三角函數關系可知
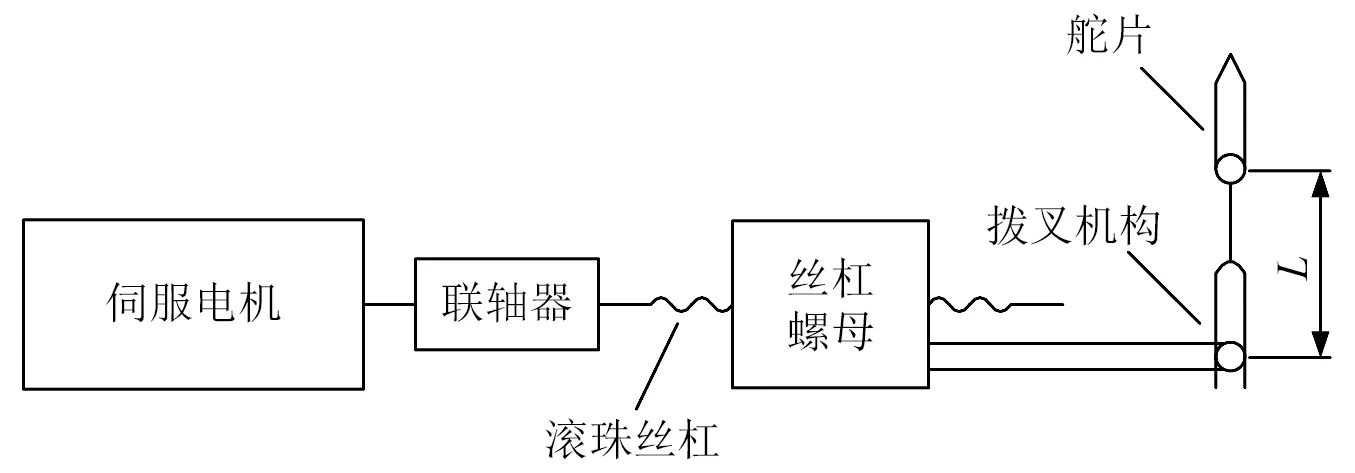
圖12 燃氣舵電動舵機系統傳動機構示意圖Fig.12 Schematic diagram of transmission mechanism of gas rudder electro-mechanical actuator system
(11)
2.3 燃氣舵系統仿真
在MATLAB Simulink中搭建系統的仿真模型,如圖13所示,對燃氣舵理想舵偏角和實際舵偏角的差值進行PID調節。PID的比例參數KP實時反映系統的偏差,增大KP可以加快系統的動態響應,但超調量變大,KP過大會使系統不穩定;積分參數KI為積分時間常數TI的倒數,可以消除靜差,通常在其他條件不變時,TI越大積分作用越弱,系統的超調量越小,但響應速度變慢;微分參數KD反映系統偏差信號的變化率,可以在偏差出現之進行超前調節,從而加快系統的響應速度,減少調節時間。根據工程經驗整定,先由0逐步增大KP,由較大值逐步減小KI,最后加入KD進行微調,使系統達到要求。最終選取比例、積分、微分的參數分別為KP=17,KI=1 370,KD=0.05,得到系統的階躍響應結果和正弦信號跟蹤仿真結果分別如圖14和圖15所示。
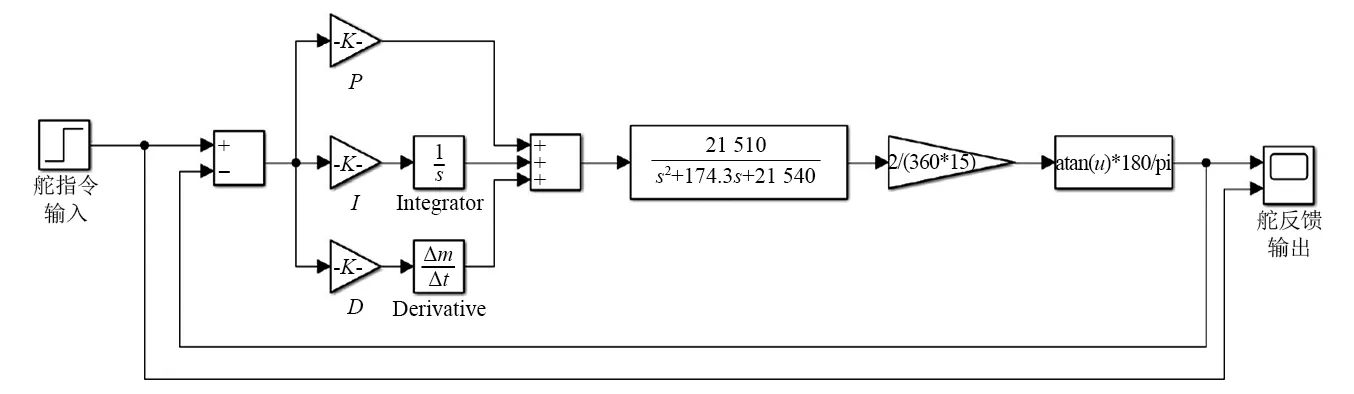
圖13 燃氣舵電動舵機系統控制框圖Fig.13 Control block diagram of gas rudder electro-mechanical actuator system

圖14 燃氣舵舵機系統階躍響應仿真結果Fig.14 Simulation results of step response of gas rudder actuator system
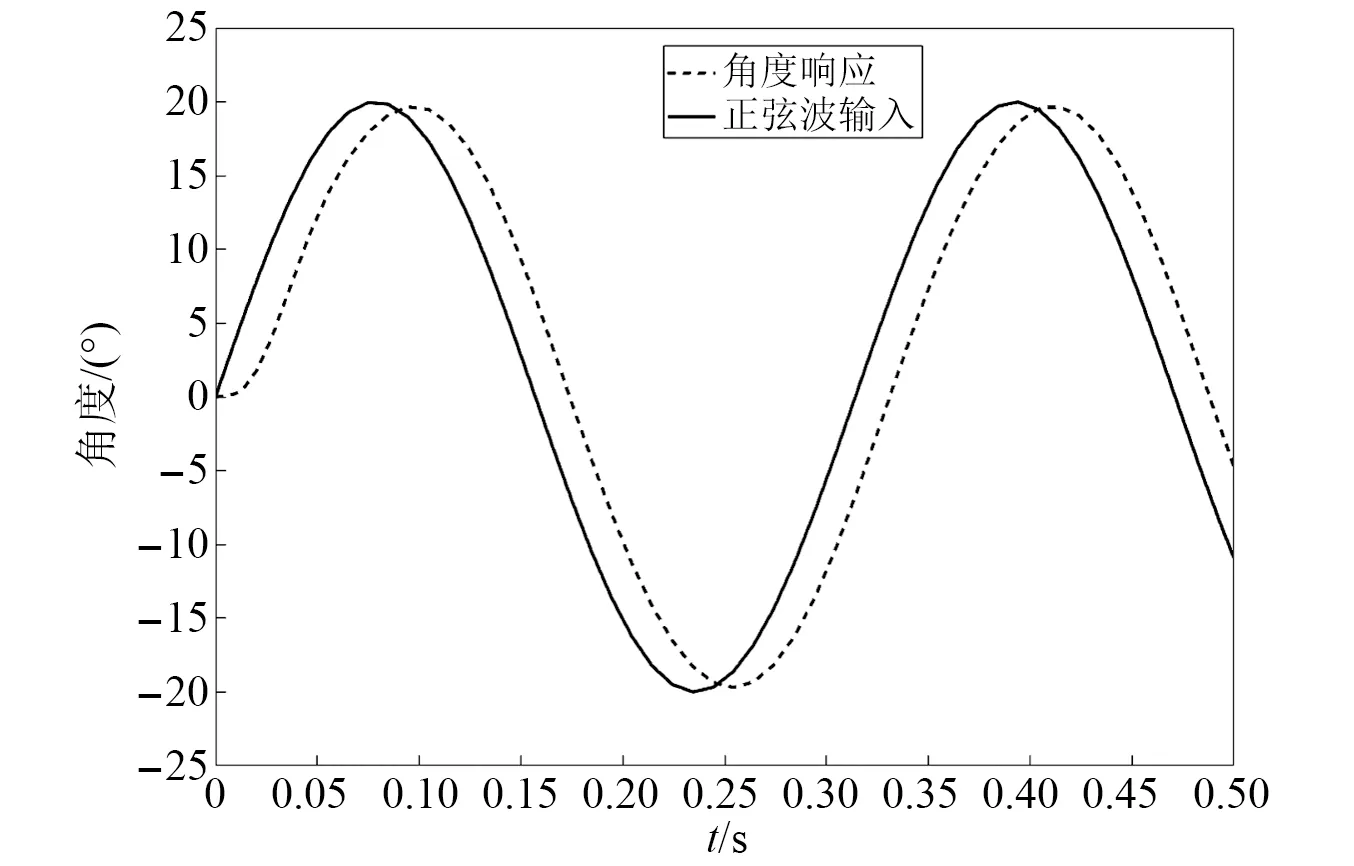
圖15 燃氣舵舵機系統正弦信號跟蹤仿真結果Fig.15 Simulation results of sine signal tracking of gas rudder actuator system
PID控制的上升時間為20 ms,超調量約為5%。對于20° 20 Hz的正弦信號跟蹤,實際舵偏角相對于理想舵偏角在幅值上存在約0.3°的偏差,相位移約15 ms。總體來說,該系統的PID控制處于較高水平。
3 燃氣舵單片舵舵偏系統試驗
搭建燃氣舵系統硬件控制平臺,進行空載條件下單片舵舵偏系統PID閉環控制試驗,測試舵片偏角的響應性能。
將PID參數寫入電機控制代碼中,伺服電機使用位置模式,根據ADAMS運動學分析結果,設置電機的加速度為8 000 r/min/s,轉速為3 000 r/min。依次給定舵機偏轉指令8°和16°,得到舵偏角連續階躍變化曲線,結果如表2所示。
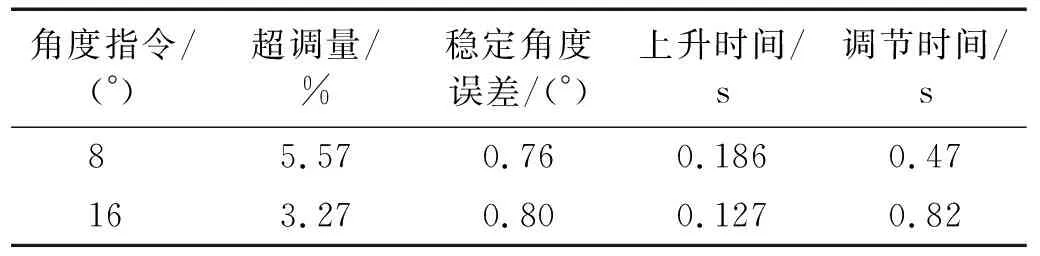
表2 舵片偏角PID控制試驗結果Tab.2 Experimental results of the PID control of the deflection angle of the rudder blade
舵偏指令為8°和16°時的PID控制結果,超調量、穩定角度誤差和上升時間相差不大,但16°時的調節時間明顯大于8°。由于傳動機構存在間隙,系統的試驗響應結果和仿真結果相比存在一定滯后。由圖16可知,系統的實際采樣值存在小幅抖動,可以看出系統抵抗干擾的能力一般,但當干擾小時能夠達到較好的控制效果。
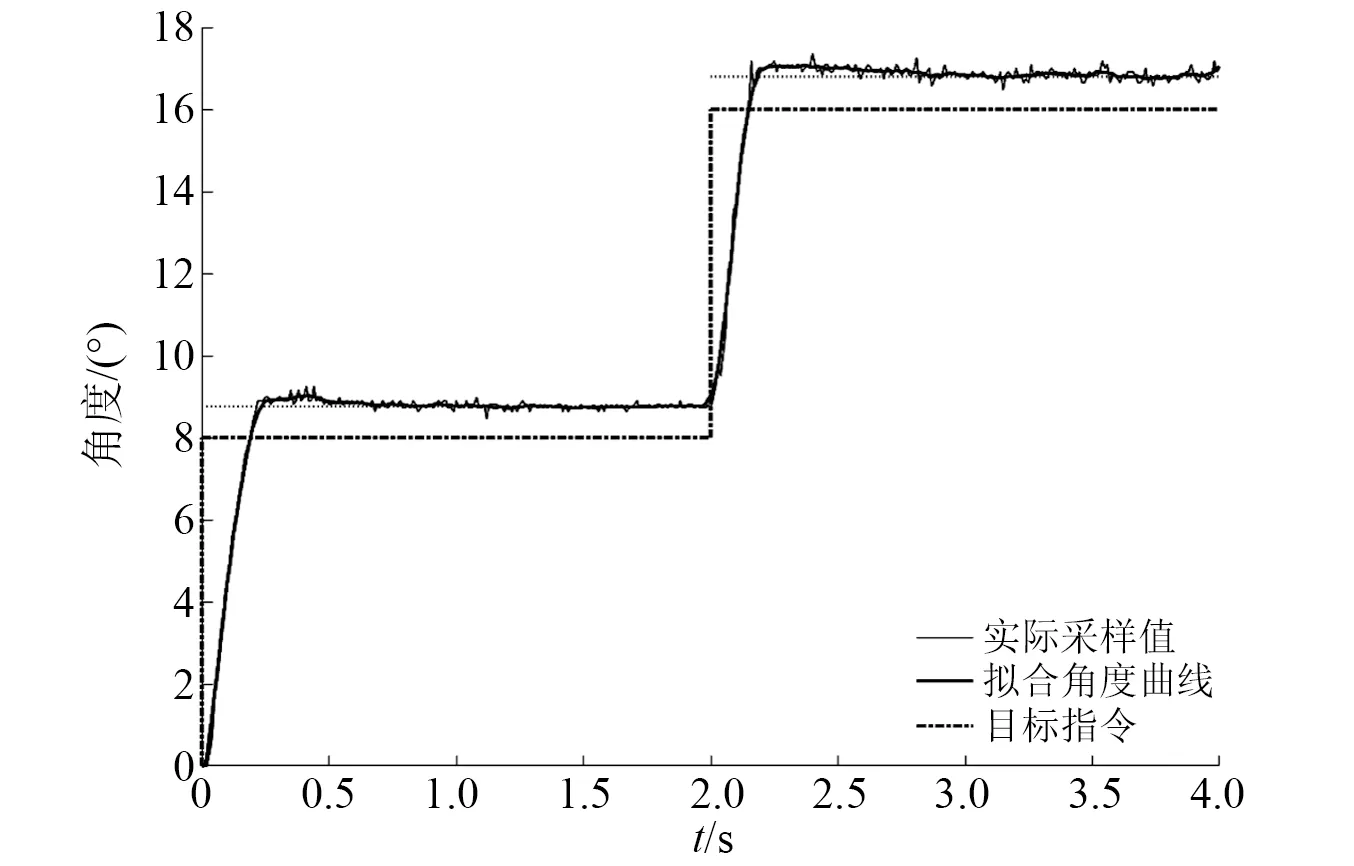
圖16 舵偏角8°和16°時的階躍變化曲線Fig.16 Step change curves for rudder deflection angles of 8°and 16°
4 結 論
(1) 基于ADAMS對傳動機構進行運動學仿真和多剛體系統動力學仿真,得到了不同啟動響應時間下舵片的速度、加速度曲線和零件的沖擊力曲線,利用動力學仿真結果在ANSYS中對危險零件進行瞬態動力學分析,得到其應力云圖、最大動應力曲線和最大變形量曲線。
(2) 建立了燃氣舵系統的數學模型,在MATLAB Simulink進行系統的PID控制仿真,并利用試驗驗證了單片舵的PID閉環運動控制能夠達到較好的控制效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
