水翼三維非穩態空化流動特性數值研究
2023-09-13 13:19:42李偉平
實驗室研究與探索 2023年6期
關鍵詞:方向
鄧 飛, 張 松, 梁 興, 李偉平
(1.南昌工程學院南昌市低品位能源轉化與系統節能技術重點實驗室,南昌 330099;2.渝能(集團)有限責任公司,重慶 401121)
0 引言
水翼空化具有強烈的非定常特性,易引起流場空泡團產生,形成周期性脈動造成水翼水動力載荷變化,從而出現水翼振動和流場噪聲等問題[1],影響流體機械的安全可靠運行。一直以來,研究空化發生的機理、特性和抑制技術都是流體機械研究的重點和難點[2]。研究表明,水翼安放角度[3]、雷諾數、繞流速度[4]等水力因素決定了水翼的繞流特征。謝春梅等[5]針對高雷諾數下三維水翼的梢渦流場,采用基于浸沒邊界法的壁模型大渦模擬方法,對NACA16020 水翼進行了數值研究,系統觀察了流場的各類統計特性。Wei 等[6]對翼型在6°攻角下的水動力及空化性能進行數值研究,當空化發生時水動力特性將劇烈惡化。劉胡濤等[7]對高雷諾數的NACA0012 水翼繞流開展了數值計算,探討了初始攻角條件、繞流速度以及剛心位置三個因素對水翼振動的影響,水翼振動狀態依賴于系統的初始條件,當繞流速度不斷增大時水翼將發生顫振現象。田北晨等[8]基于建立的多尺度算法對繞NACA66 水翼空化流動進行模擬,在回射流發展階段,離散空泡逐漸增加并分布在回射流擾動區。Yang等[9]采用MRT-LBM方法對空泡潰滅進行熱力學分析并驗證了MRT-LBM空泡潰滅的有效性。
目前,針對水翼空化現象的機理研究主要集中在空泡初生階段[10-11],對不同繞流速度下的水翼空化特性及其準周期性演變過程研究較少。本文針對不同繞流速度下的NACA6408 水翼非穩態繞流過程,數值研究各流動因素的變化規律以及其對水翼空化過程的影響,旨在獲取水翼發生空化的臨界繞流速度和壓力等重要參數,以及空化過程的準周期性特征等。
1 數值模型與網格劃分
本文采用計算流體動力學軟件Fluent 16.0 進行數值模擬研究,如圖1 所示為NACA6408 三維水翼計算域模型,依據該水翼的相對彎度和相對厚度,對其及流體域進行建模。整個流體域長度為10b,其中b為水翼弦長,進口距水翼前緣距離為3b,出口距水翼尾緣為6b,計算域的進口面、出口面尺寸為150 mm×150 mm。

圖1 NACA6408三維水翼計算域模型
本文利用ICEM 網格劃分軟件對三維NACA6408水翼計算域進行結構化網格劃分,針對水翼的頭部、尾部及上下壁面等部位進行局部網格加密。經過網格無關性計算驗證,當網格尺寸小于0.07 mm 時,水翼的升力系數趨于穩定[12],為合理利用計算機資源,提高數值模擬的準確性、經濟性,采用邊界層為0.07 mm的網格尺寸,網格總數為5501430。采用k-ε 湍流模型[13]和Zwart-Gerber-Belarnri(ZGB)空化模型[14]進行模擬計算,與Schnerr-Sauer(SS)空化模型比較,本文采用的Zwart-Gerber-Belarnri(ZGB)空化模型使用空泡密度表示氣相的體積分數[15],能夠更好地模擬出非定常空化的準周期性,捕捉到更強烈的云狀空化。
2 計算結果與討論
計算模型的b=150 mm,計算域長度則為1.5 m,在繞流速度υin=1、5、10、15 和20 m/s 5 種工況下分別進行數值模擬計算。在沿翼型主流方向等間距截取11 個截面i(i=1,2,…,11)。由于翼型結構特點,同一個截面將被翼型分成上下兩部分(見圖1),令水翼吸力面以上的截面為B 部分,即Bi,壓力面以下的截面為A部分,即Ai。
通過對繞流攻角為4°時的5 種不同繞流速度工況依次計算,數值結果表明翼型在υin=1、5 和10 m/s工況下不會發生空化,在υin=15 和20 m/s 時產生空化現象。在前3 種工況下,截面A 部分的壓力在不同位置處變化較小,主要是由于NACA6408 翼型結構的壓力面曲率很小;截面B部分的平均壓力pav先減小后增加,即pav從截面B1減小至截面B4后增大,直至截面B11,原因是截面面積的變化使速度呈現出先增大后減小的規律,pav則是先減小后增大。此時同一截面的A與B部分的pav和湍動能κ 變化平穩,不存在空化現象。
如表1 所列為不同υin工況下以截面1、4、6、8、11為代表的B部分截面pav值。從表中可以看出,在同一υin下,不同時間(t=0.05 和0.1 s)與不同截面間的pav略有不同,但是維持在同一個數量級。υin<10 m/s時沒有發生空化,截面B1~B4間的pav隨著速度的增加而逐漸減小,相同速度下截面B6~B11間的pav逐漸增大;υin=5 m/s時,pav≥89.528 kPa;當υin=10 m/s時,pav≥52. 192 kPa;而當υin=15 m/s 時,pav≥11.890 kPa,當υin=20 m/s 時,pav≥9.763 kPa。因此發生空化時,pav≤52.192 kPa。
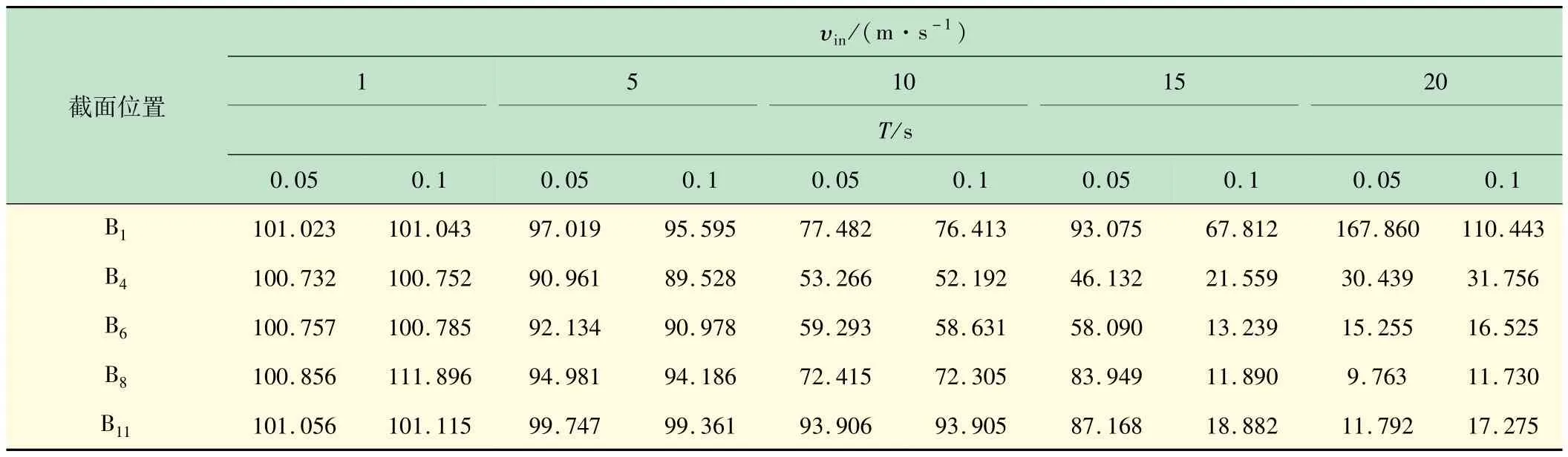
表1 不同工況下截面B部分的pav變化kPa
如圖2 所示為υin=15 m/s下翼展中間截面體積分數及壓力云圖。由圖2(a)可知,在此工況下翼型的空化呈現一定的周期性,且周期T=75 ms。由于此工況為非定常流動,無法對每個時刻進行描述,故將一個周期均分為8 等分以方便分析。在T/8 時,空化開始出現于沿翼型吸力面主流方向b/4 ~b/2 處且附著于吸力面,隨著時間推移空化過程越來越明顯;在2T/8時,翼型吸力面b/4 ~b/2 處附著型空泡開始向鉤狀空泡轉變;在3T/8 時,附著型空泡長度達到最大,其在鉤狀空泡向后延伸至翼型吸力面4b/5 處開始脫落;在4T/8 ~5T/8 時,空泡在翼型吸力面4b/5 處部分脫落,脫落后的空泡流向下游;在6T/8 時,剩余空泡繼續附著于翼型吸力面b/3 ~5b/6 處且空泡長度隨著時間推移而逐漸變小;在7T/8 時,空泡長度縮短至翼型吸力面b/3 ~2b/3 處,最終在8T/8 時逐漸減小為零并進入下一個周期,空化過程呈現出準周期性規律。由圖2(b)中可知,在6T/8 時,低壓區的覆蓋范圍最大,隨后低壓區的覆蓋范圍開始減小;在8T/8 時,低壓區的覆蓋范圍達到最小,且與初始時刻的壓力p相同,從而形成一個完整的周期。結合圖2(a)可知,此時翼型吸力面低壓區的p低于空化發生的臨界壓力。
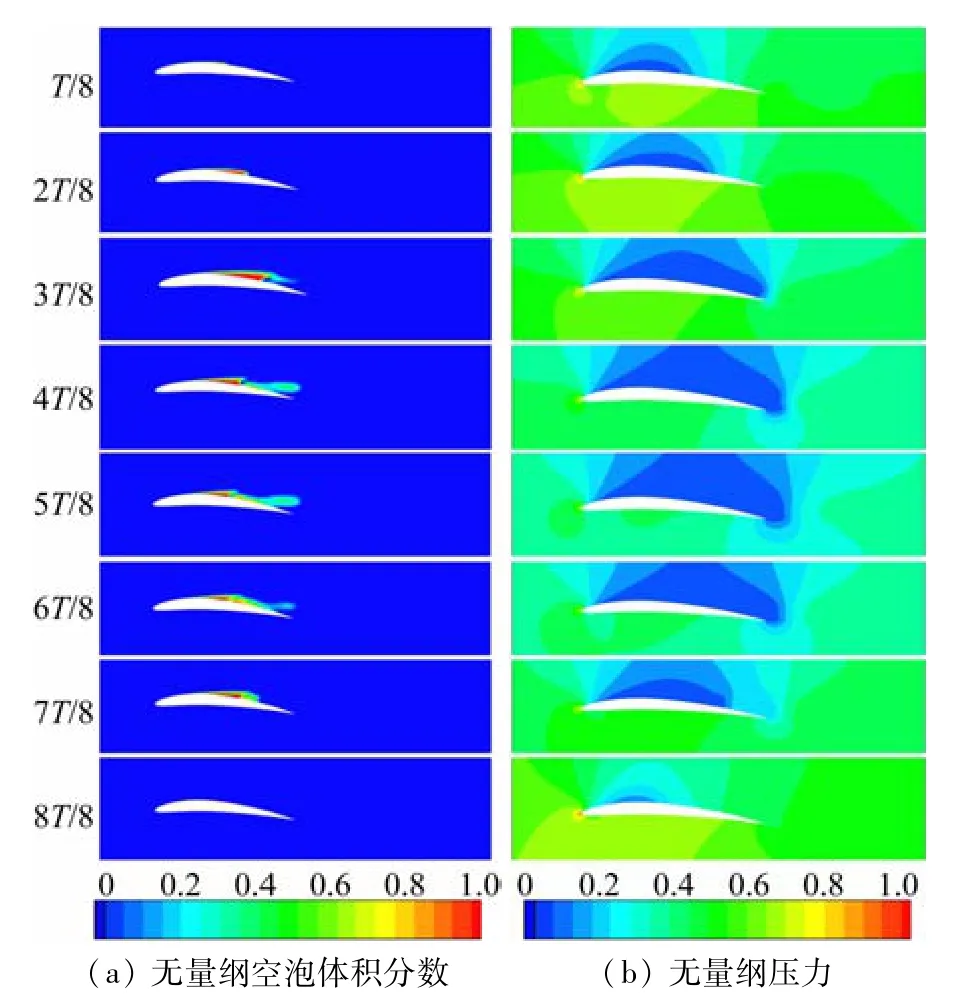
圖2 在υin =15 m/s時,翼展中間截面的體積分數及壓力云圖
2.1 水翼各截面壓力p變化分析
針對υin=15 m/s工況水翼表面發生空化時A、B兩部分各截面處的壓力p、湍動能κ、速度分量u、v和w等參數變化進行分析。圖3 所示υin=15 m/s時,翼型主流方向i位置的A和B 部分在一個周期內最大、最小和平均壓力折線圖。由圖可知,A 部分截面的最大壓力pmax和最小壓力pmin隨著截面呈現逐漸減小的趨勢,即在A2~A4基本趨于平穩;A5~A11呈現逐漸下降。結合NACA6408 翼型結構以及在υin=1、5 和10 m/s工況下無空化現象,可以判定A1~A4壓力下降不是截面面積變化造成的,而是受空化發展的影響。B部分截面的pmax和pmin在B1~B4間呈斷崖式下降,原因是翼型結構的影響。B4~B11呈現上升趨勢,上升過程波動幅度存在較大的差異。
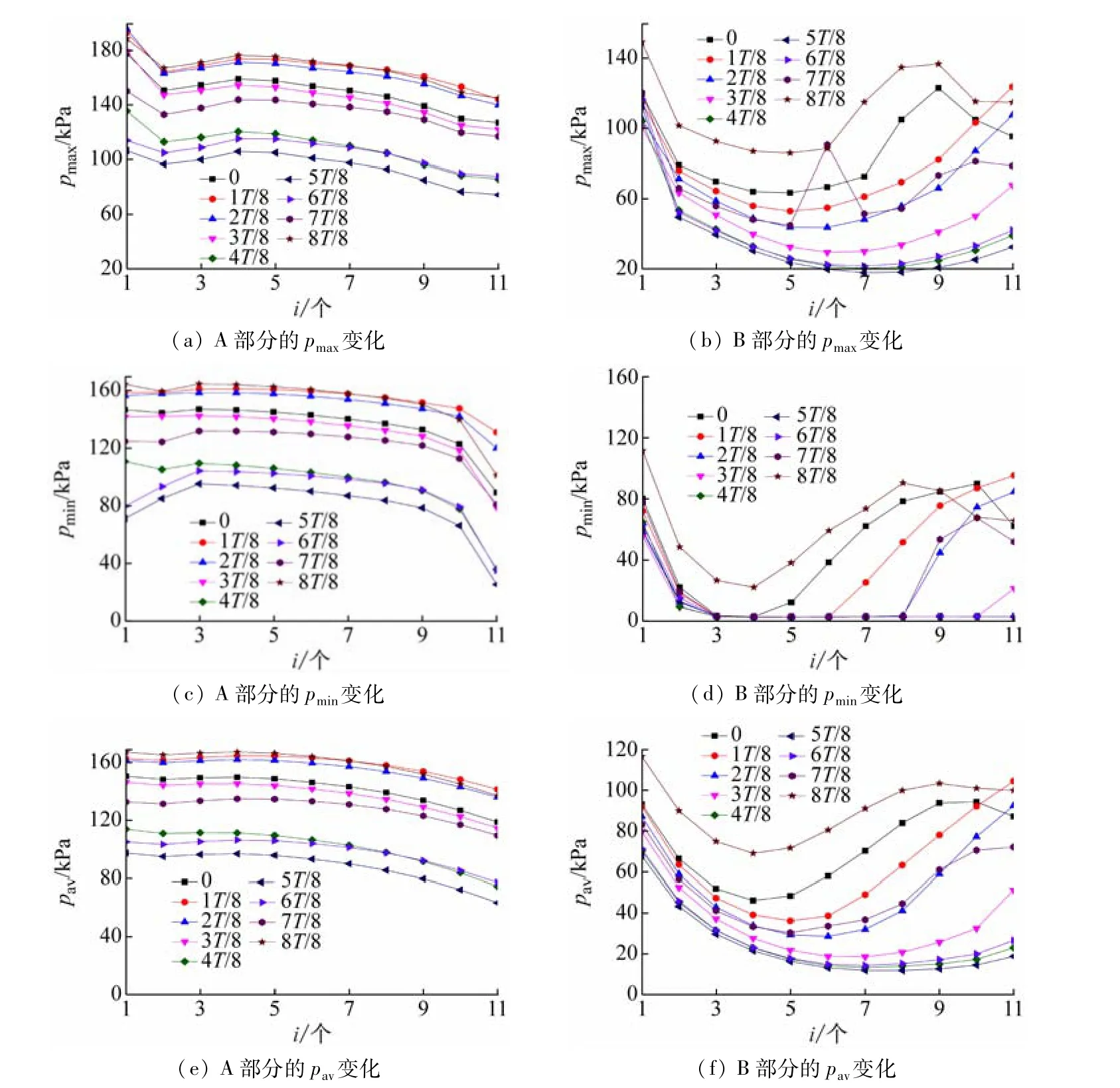
圖3 在υin =15 m/s時,11個不同截面位置的壓力變化折線圖
在0 ~2T/8 段,pav呈現大幅度上升,整體平均增加了12 kPa 左右,原因是因為空泡附著于翼型吸力面,且空泡占比很小,對流場影響較小,從而使pav逐漸上升;在3T/8 ~6T/8 段,B4~B11平均壓力pav在降至最低后幾乎不再變化,中間位置的截面壓力維持在110 kPa左右,這是由于此時附著型空泡開始向鉤狀空泡轉變,并且鉤狀空泡脫離翼型吸力面形成獨立的空泡,此時為空化的核心階段,壓力整體處于低壓狀態;在7T/8 ~8T/8 時刻B1~B11的pav開始逐漸升高,并恢復至1T/8 的壓力水平,這是由于脫落的空泡隨主流流向下游并逐漸潰滅的原因。
綜合分析圖3 可知,A 部分截面的pmax、pmin和pav的波動幅值都明顯大于B 部分,因此水翼翼型結構對壓力脈動的幅值有著重要影響,空化顯著的區域其壓力脈動更加明顯,可以利用壓力脈動變化來探究空化現象特性。
2.2 各截面κ分布特性
圖4 所示υin=15 m/s下A、B部分各截面κ折線圖。由圖可知,在一個周期內,A部分截面的κ幾乎不存在變化,。此時流場A 部分截面相對穩定,可以排除翼型結構對κ的影響。B部分截面中,在B1~B5區段內湍動能隨時間變化較小,流場相對穩定;而在B6~B11內湍動能變化較為明顯,在B11處湍動能最大值增加至3.6 J/kg,說明B6~B11內部空泡的產生使得流場紊亂。空化發生區域在0 時刻湍動能變化明顯,為空化初始階段,此時流場相對紊亂,能量耗散大;在2T/8 和3T/8 時產生附著型空泡,流場相對穩定;4T/8至8T/8 時空化由附著型空泡向鉤狀空泡轉化,在脫離翼型吸力面后最終潰滅,流場相對紊亂,能量耗散大,如圖4 的B部分截面所示。
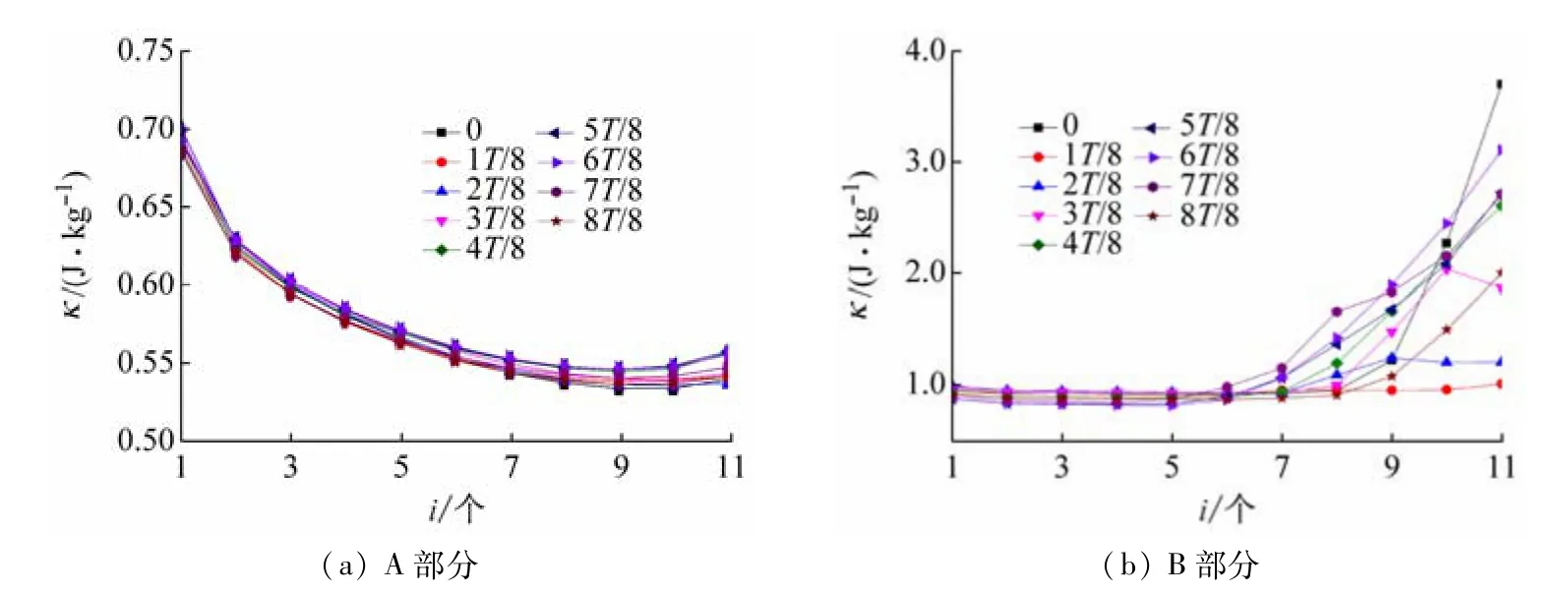
圖4 在υin =15 m/s時,11個不同截面位置的κ變化折線圖
因此,可看出湍動能代表流場的紊亂程度,空化的發生與湍動能大小有關,同時與翼型結構和回射流等有關。湍動能又隨速度增加而增大,因此流場速度也是判斷流場紊亂的因素之一。
2.3 水翼各截面速度分布
為了分析各截面的速度對流場脈動特性的影響規律,如圖5 所示υin=15 m/s 下A、B 部分截面在同1個周期內X、Y、Z3 個方向的平均分速度u、v和w折線圖。
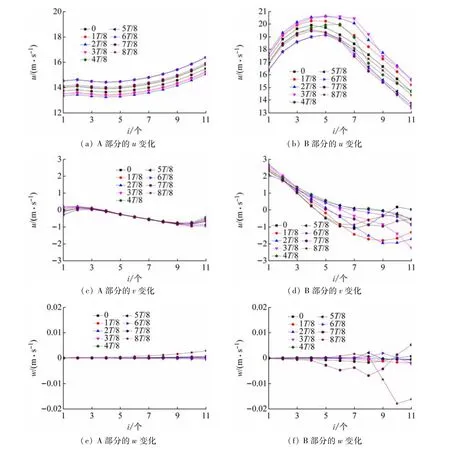
圖5 在υin =15 m/s時,X、Y、Z方向11個不同截面位置的平均分速度變化
(1)A部分截面。X方向上A1~A3的主流方向速度u基本平穩;A4~A11間速度u有小幅度上升,原因是翼型截面積變化造成的影響。Y方向上速度v在A1~A4速度為正且變化緩慢,而在A5~A11間速度v方向為負且逐漸增大,原因是水流以較大的υin沖擊翼型頭部結構從而產生反方向的速度。Z方向的速度w基本維持在0 附近,整體比較穩定。
(2)B部分截面。X方向上B1~B4區間主流方向速度u逐漸增大;在B5~B11區間u逐漸減小且變化幅度較大,原因是翼型截面積變化以及空化現象的產生。Y方向上在B1~B4速度v為正且逐漸減小;在B5~B11速度v方向為負,原因是空化的產生形成復雜旋渦;隨著時間推移,Y方向上速度零點的出現時間沿截面逐漸后移,說明產生的旋渦逐漸往后移動,證明了空泡的脫離并且向下游移動,B9~B11速度v方向為負且逐漸增大,主要是由于空泡隨主流流向下游或者發生潰滅,導致Y方向速度v最后逐漸減小。Z方向上速度w維持在0 附近且有正有負,說明空化過程產生的旋渦并不是平面型,而是復雜的立體型旋渦。
綜上所述,X主流方向速度u主要受υin的影響,Y和Z方向的速度v和w主要受空化過程的影響,速度方向發生改變說明有空泡的脫離、潰滅和立體型旋渦的產生。針對水翼空化過程的X、Y、Z3 個方向分速度分析是探討空化現象特性的重要研究思路之一。
3 結語
本文基于計算流體動力學技術數值研究了NACA6408 水翼在繞流攻角4°時不同繞流速度工況的流場特性,通過數值分析υin=15 m/s下水翼空化發生過程,獲得流場p、κ以及各方向分速度等參數的變化規律。結果表明:①隨著進口速度的增加,各截面上的平均湍動能以及速度的波動幅值明顯增加,壓力、湍動能以及流場速度的變化與空化過程密切相關。②水翼空化發生區域壓力、湍動能以及流場速度變化明顯,水翼壓力面以下區域的參數變化相對緩慢,水翼吸力面以上區域變化相對明顯。壓力面變化曲率較大導致進口水流流經翼型吸力面時流場相對紊亂。③在υin=1、5 和10 m/s工況時水翼表面不會產生空化現象,在υin=15 和20 m/s時發生空化,同時空化基本在B5~B11發生。④空化發生時非主流方向(Y和Z方向)的速度存在方向變換,形成了復雜的立體型旋渦。本文的數值計算結果對深入認識水翼空化演變機理,提高水翼抗空化性能具有重要的參考意義。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50