水下穩(wěn)態(tài)渦流場聲傳播的數(shù)值模擬和實(shí)驗研究
2023-09-14 01:00:12喻敏樊丁繁張燁劉航
聲學(xué)技術(shù) 2023年4期
喻敏,樊丁繁,張燁,劉航
(1.武漢理工大學(xué)船海與能源動力工程學(xué)院,湖北武漢 430074;2.中國船舶集團(tuán)有限公司系統(tǒng)工程研究院,北京 100094)
0 引 言
聲波探測作為一種直接的、非侵入式的和全局式的測量方法,可用于水下旋渦特性的測量[1-2]。聲波在穿過渦流場時,其傳播路徑發(fā)生變化[3-4],由此產(chǎn)生聲波相位的變化,相位變化量和渦流場的形態(tài)特征密切相關(guān)。因此,發(fā)展基于渦流場聲傳播特性發(fā)展水下渦流場探測識別技術(shù)成為可能,在軍事和工程中具有應(yīng)用前景。
使用聲波探測方法進(jìn)行渦特性的計算首先在超聲領(lǐng)域得到了應(yīng)用。1992年,文獻(xiàn)[5-6]提出了在非均勻介質(zhì)(渦流場)中,引入光學(xué)中相位共軛鏡的方法對目標(biāo)的反射聲進(jìn)行聚焦,以達(dá)到定位的目的。1997年,Roux等[7]通過實(shí)驗從接收信號的幅值與相位差兩個方面研究聲信號穿過渦流場后產(chǎn)生的變化。從1998年開始,文獻(xiàn)[8-10]先后使用多種實(shí)驗裝置對水下渦流場進(jìn)行深入研究,指出渦流同時改變了聲波的傳播方向和傳播速度。2001 年,Pag‐neux等[11]基于射線聲學(xué)研究了二維空間中的理想渦對高頻聲波的散射。2005年,Rosny等[12]針對低馬赫數(shù)渦流場引起的聲信號相位跳變量較小、不易測量的問題,采用了TRM 技術(shù)來增大相位跳變量、降低干擾,取得了較好的效果。2023 年,陳雨晨等[13]針對介質(zhì)運(yùn)動對聲傳播的影響,建立一種利用高斯波束法求解亞音速運(yùn)動介質(zhì)中的聲傳播模型,認(rèn)為在海流會明顯影響聲的傳播。
上述文獻(xiàn)研究中,多采用理想渦流速分布公式,甚少通過現(xiàn)代計算流體力學(xué)(Computational Fluid Dynamics,CFD)方法獲取渦流場流速參數(shù)。文獻(xiàn)[13]雖然采用射線聲學(xué)方法對運(yùn)動介質(zhì)中的聲傳播進(jìn)行研究,但沒有涉及復(fù)雜流場中的聲傳播問題。本文針對聲波通過水下穩(wěn)態(tài)渦流場的數(shù)值模擬方法及實(shí)驗展開研究,首先根據(jù)穩(wěn)態(tài)渦流場中的射線微分方程數(shù)值模擬聲線傳播軌跡,然后開展水池超聲傳感器實(shí)驗,最后將數(shù)值模擬和實(shí)驗測量的通過渦流場的聲信號時延量進(jìn)行對比驗證,證明了本文通過射線聲學(xué)方法數(shù)值模擬水下穩(wěn)態(tài)渦流場聲傳播的有效性。
1 渦流場聲線軌跡數(shù)值模擬
渦流場聲傳播特性的改變,主要表現(xiàn)為通過渦流場的聲波振幅與相位的變化[14]。渦流場聲傳播效應(yīng)示意圖如圖1所示,順流區(qū)聲速加速,逆流區(qū)聲速減速,最終導(dǎo)致在接收端聲波的相位超前或滯后。
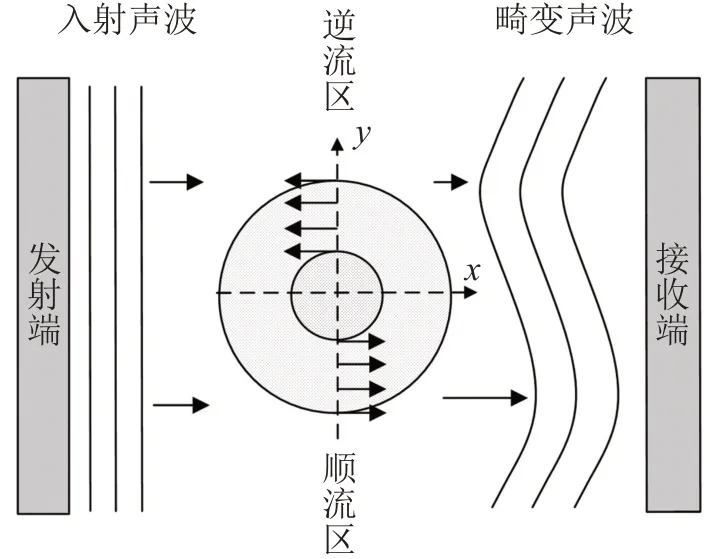
圖1 渦流場聲傳播效應(yīng)示意圖Fig.1 Schematic diagram of sound propagation effect in vortex field
射線聲學(xué)是幾何聲學(xué)的近似理論,適用于解決高頻情況下的聲傳播問題。基于射線理論可以有效模擬聲波通過渦流場的聲線軌跡及信號變化,具有直觀、計算效率高的特點(diǎn)。為模擬聲波通過渦流場的聲線軌跡,根據(jù)穩(wěn)定移動介質(zhì)中的程函方程[15],推導(dǎo)出可進(jìn)行聲線軌跡模擬計算的穩(wěn)態(tài)渦流場射線聲學(xué)微分方程組:
式中:γ(r)為渦度;α表示聲線掠射角;u表示渦流場速度。
聲線軌跡數(shù)值仿真示意圖如圖2所示。在理論計算過程中,對于某一條聲線s,固定每步迭代中x方向的增量Δx,通過式(1)獲取y方向的增量Δy,進(jìn)而確定該聲線的軌跡。

圖2 聲線軌跡數(shù)值仿真示意圖Fig.2 Schematic diagram of sound ray numerical simulation
聲線通過渦流場后的數(shù)值模擬軌跡如圖3 所示。由圖3可知,通過渦流場的聲線掠射角發(fā)生偏移,越靠近渦核中心其掠射角變化越大,并在渦核后方形成聲線焦散區(qū)。仿真中,渦流場切向速度(簡稱:流速)r分布采用二維穩(wěn)態(tài)蘭金渦流(Rankine vortex):

圖3 a=10 mm,Ma=4.6×10-2時的聲線傳播軌跡Fig.3 Sound ray propagation trajectory when a=10 mm,Ma=4.6×10-2
式中:r表示渦流場某一測點(diǎn)到渦核中心點(diǎn)的距離,a為渦流場流速最大處渦核特征半徑;Γ=2πacMa,定義為渦流環(huán)量;c=1 500 m·s-1為水中聲傳播速度;Ma為馬赫數(shù),定義為渦流最大切向速度與聲速之比。
本文數(shù)值模擬結(jié)果與文獻(xiàn)[16]實(shí)驗結(jié)果進(jìn)行對比,在相同條件設(shè)置下,聲信號相位差計算結(jié)果如圖4所示。由圖4可見,相位差的數(shù)值模擬結(jié)果與文獻(xiàn)實(shí)驗結(jié)果整體上吻合較好。為了進(jìn)一步驗證數(shù)值模擬方法,本文設(shè)計并搭建了超聲測量渦流場實(shí)驗平臺,開展相關(guān)實(shí)驗驗證。
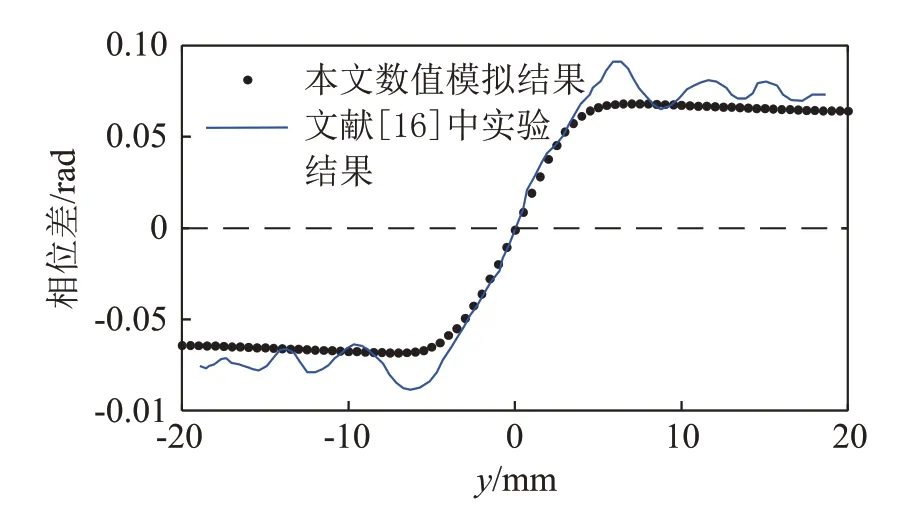
圖4 聲信號相位差本文數(shù)值模擬結(jié)果與文獻(xiàn)[16]實(shí)驗結(jié)果的對比Fig.4 Comparison between the numerical simulation result in this paper and the experimental result from reference[16] regarding the phase difference of acoustic signal
2 實(shí)驗裝置及渦流場參數(shù)
2.1 實(shí)驗儀器設(shè)備
實(shí)驗設(shè)備實(shí)物圖如圖5(a)所示。實(shí)驗通過螺旋槳產(chǎn)生穩(wěn)態(tài)渦流場,螺旋槳直徑d=60 mm,固定在尺寸為2 m×0.6 m×0.8 m 的亞克力長方體水池中,實(shí)驗布置如圖5(b)所示。

圖5 實(shí)驗設(shè)備實(shí)物圖及實(shí)驗布置示意圖Fig.5 Photo of the experimental equipment and schematic diagram of experiment layout
螺旋槳位于整渦管頂部,由電機(jī)帶動旋轉(zhuǎn)產(chǎn)生渦流。渦流流出整渦管后,使用超聲傳感器發(fā)射和接收通過渦流的聲信號。為保證兩個超聲傳感器中軸在同一條直線上,超聲傳感器剛性固定在同一移動滑臺上。水池裝有導(dǎo)軌和滑尺,便于精確標(biāo)定傳感器位置。針對螺旋槳高速旋轉(zhuǎn)產(chǎn)生的振動,在實(shí)驗中將造渦裝置和測量裝置分別固定在兩組滑臺上,在螺旋槳與其固定滑臺聯(lián)接處使用螺絲螺母固定并加墊片以減少振動。儀器設(shè)備型號及參數(shù)如表1所示。

表1 實(shí)驗儀器設(shè)備型號及參數(shù)Table 1 Model and parameters of experimental equipment
2.2 渦流場CFD仿真
由于實(shí)驗中的渦流場速度分布不易獲取,本文基于現(xiàn)代流體仿真軟件Fluent,根據(jù)實(shí)驗布置對渦流場分布進(jìn)行數(shù)值仿真。本文使用Design Modeler建模軟件建立三維模型。計算域的劃分與邊界條件的設(shè)置如圖6所示。采用ICEM前處理軟件劃分網(wǎng)格,使用六面體結(jié)構(gòu)化網(wǎng)格對整體區(qū)域進(jìn)行劃分,并在旋轉(zhuǎn)域表面進(jìn)行局部加密,以更好地模擬近壁流動。
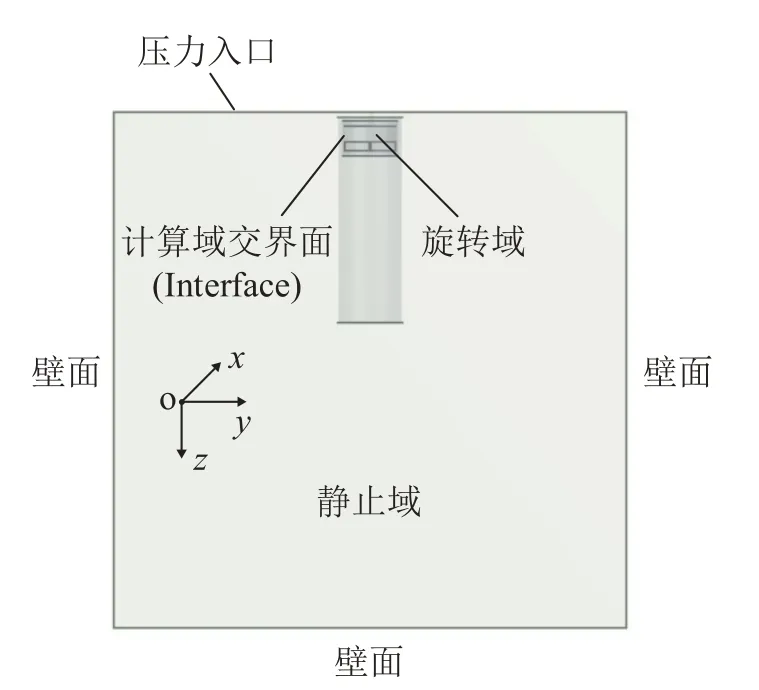
圖6 數(shù)值模擬計算域Fig.6 Numerical simulation computing domain
螺旋槳所在的旋轉(zhuǎn)域采用穩(wěn)態(tài)(Moving Refer‐ence Frame,MRF)方法,并繞z軸以1 400 r·min-1的轉(zhuǎn)速旋轉(zhuǎn)。基于有限體積法求解RANS方程,湍流模型選用標(biāo)準(zhǔn)k-ε模型,調(diào)用標(biāo)準(zhǔn)壁面函數(shù)進(jìn)行計算。采用三維雙精度基于壓力隱式求解器,耦合方式采用SIMPLE 算法,離散格式采用二階迎風(fēng)格式。
2.3 渦流場參數(shù)
定義整渦管出口所在平面為z=0平面,分別在整渦管出口下端z=10、30和50 mm處取截面,得到渦流場速度分布矢量圖如圖7所示,其中z=10 mm截面上的流速分布云圖如圖8所示。由圖7、8可以看到渦流場在流出整渦管后向外消散,符合自由場渦流運(yùn)動規(guī)律。
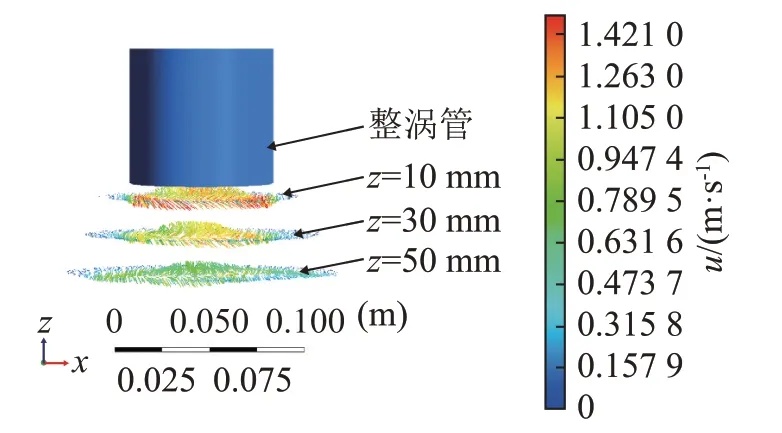
圖7 渦流場速度分布矢量圖Fig.7 Velocity distribution vector diagram of vortex field
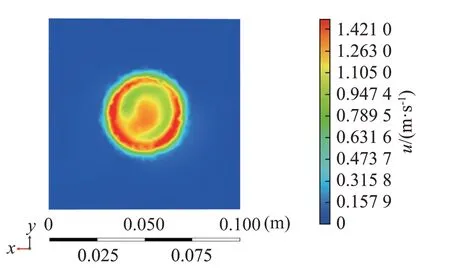
圖8 在z=10 mm處的平面渦流場速度云圖Fig.8 Velocity cloud diagram of the plane vortex field at z=10 mm
渦流流速最大位置對應(yīng)渦核半徑尺寸,由圖8可知,z=10 mm平面上的最大速度umax=1.258 m·s-1,判斷渦核半徑a=30.6 mm。根據(jù)z=10、30和50 mm處的流場速度數(shù)據(jù)可得到不同截面的渦流場主要參數(shù),如表2所示,為基于射線聲學(xué)的渦流場聲傳播數(shù)值模擬方法提供輸入?yún)?shù)。

表2 最大切向速度和渦核半徑Table 2 The maximum tangential velocity and vortex core radius obtained by simulation
3 實(shí)驗研究
3.1 實(shí)驗工況設(shè)置
為避免發(fā)生聲衍射,聲波波長需遠(yuǎn)小于渦流場尺度。根據(jù)表2中的參數(shù),選擇聲波的發(fā)射頻率為2 MHz,幅度為3 V,示波器采樣率為1.0 GHz。實(shí)驗工況通過改變兩個傳感器位置獲取不同截面的聲信號時延。在整渦管出口位置下端10、30和50 mm處分別設(shè)置3個測量平面,如圖9(a)所示;在每個平面上,依次間隔10 mm設(shè)置a~k共11組測點(diǎn),測點(diǎn)布置示意圖如圖9(b)所示。
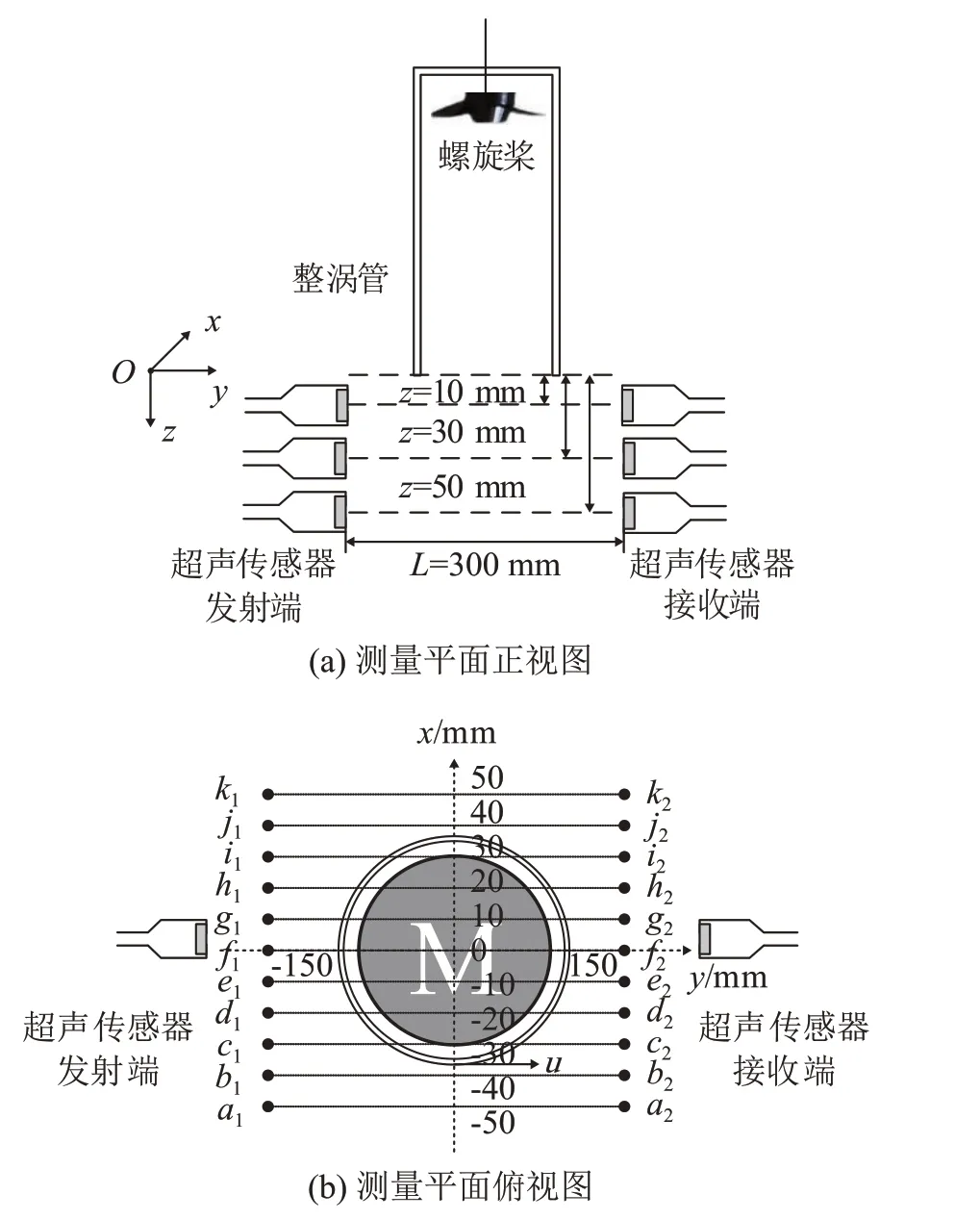
圖9 測量平面正視及俯視示意圖Fig.9 Schematic diagram of the front and top views of the measuring plane
按照表3所示工況在每個測量平面上依次對11個測點(diǎn)進(jìn)行測量、記錄、存儲數(shù)據(jù)。每處測點(diǎn)測量5次。其中,工況1是無渦情況,只需測一組工況,即以z=10 mm 平面上的測點(diǎn)a測量無渦工況下聲時延。
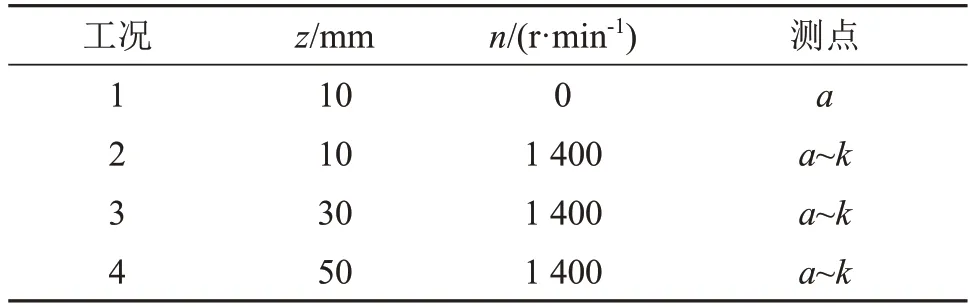
表3 實(shí)驗工況表Table 3 Table of experimental conditions
3.2 數(shù)據(jù)處理與分析
針對有渦情況,分別獲取有渦與無渦工況下的超聲傳感器接收端的時域信號。其中一組接收信號的對比如圖10 所示。采用互相關(guān)算法即可得到此組數(shù)據(jù)的時延量為2.74×10-8s。
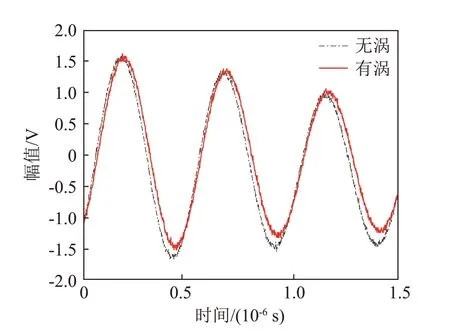
圖10 有渦和無渦工況下接收信號對比Fig.10 Comparison of the receiving signals in the vortex and no vortex conditions
不同截面的時延計算結(jié)果如圖11 所示。圖11中實(shí)線部分為根據(jù)實(shí)測數(shù)據(jù)擬合得到的時延曲線,虛線部分為針對表2中不同截面處的渦流場,采用基于射線聲學(xué)的數(shù)值模擬方法計算得到的聲信號時延值。由圖11可知,時延曲線呈現(xiàn)“S”形變化趨勢,說明渦流場對聲傳播有明顯影響。隨著z值增大,時延最大變化量減少,即渦流場最大切向速度變小;時延最大變化量對應(yīng)的x值增大,即渦流半徑增大,說明渦流在向下運(yùn)動的過程中不斷擴(kuò)散。
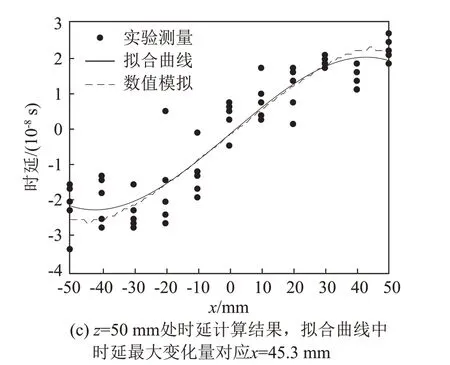
圖11 實(shí)驗測量時延數(shù)據(jù)及擬合曲線Fig.11 Time delay data and their fitting curves obtained by experimental measurement
采用相位重構(gòu)算法[9],根據(jù)實(shí)測的時延擬合曲線反演出渦流場流速分布,并與CFD 仿真流速數(shù)據(jù)以及理想Rankine渦流速數(shù)據(jù)進(jìn)行對比分析,結(jié)果如圖12所示。由圖12可知,CFD仿真得到的流場速度分布與實(shí)測數(shù)據(jù)反演流場速度分布更為接近,而根據(jù)式(2)計算的Rankine渦流速分布在最大流速兩側(cè)速度衰減較慢,這是因為實(shí)驗環(huán)境與理想流場假設(shè)存在差異的。而基于CFD 計算渦流場數(shù)據(jù),條件設(shè)置與實(shí)驗條件一致,相較于式(2)更能反映出真實(shí)的流場分布。
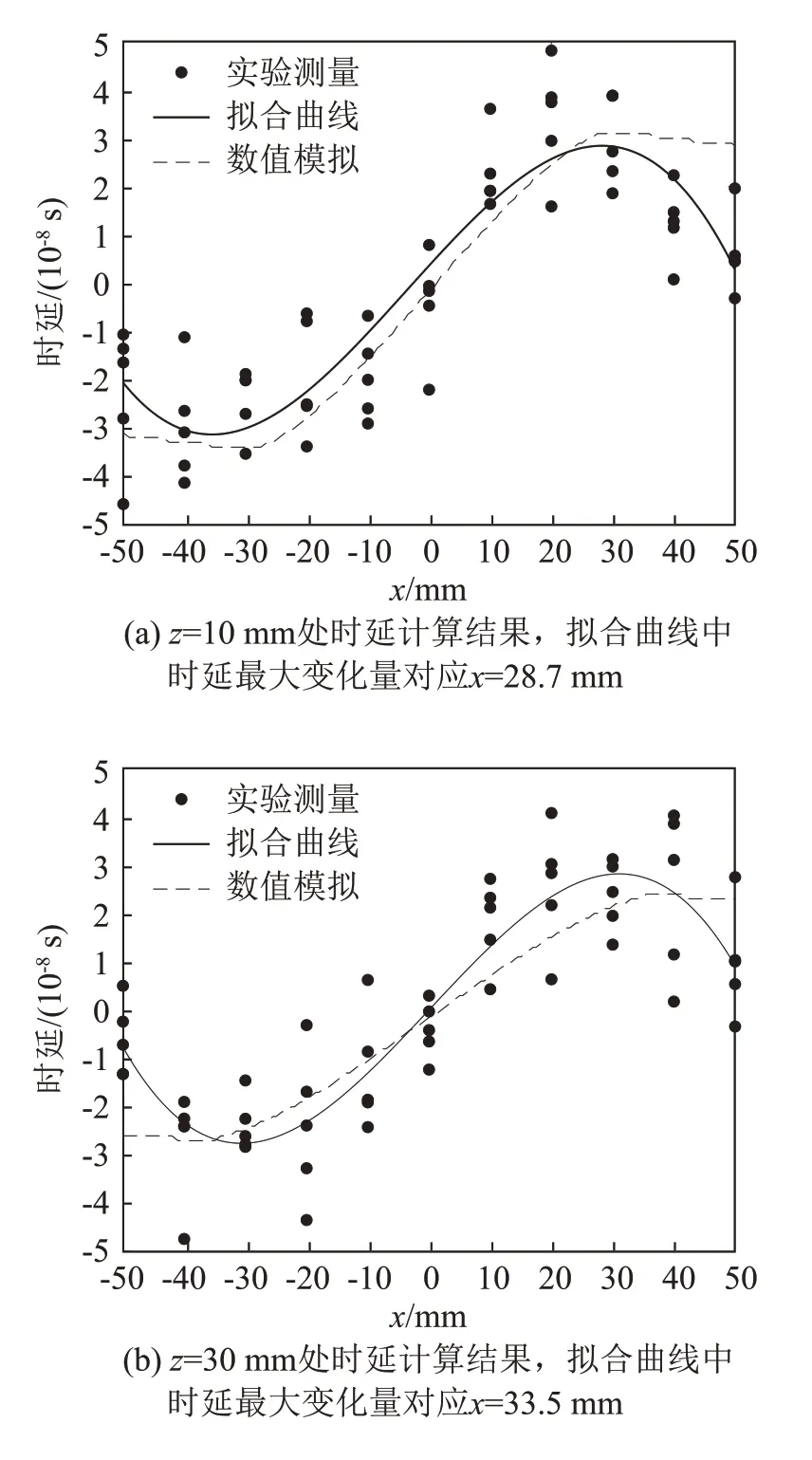
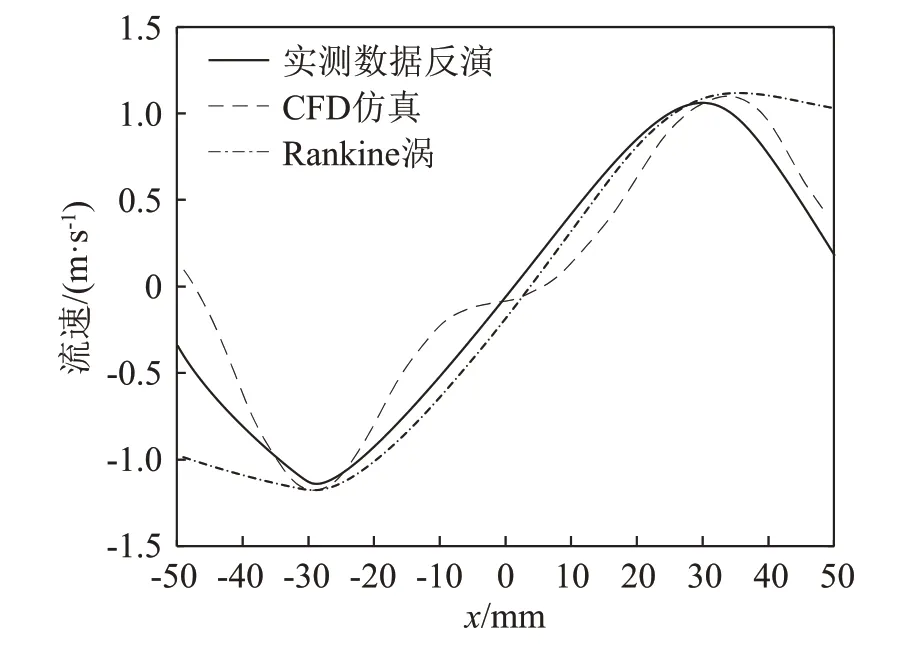
圖12 在z=10 mm處的三組平面流速分布數(shù)據(jù)對比圖Fig.12 Comparison of three sets of flow velocity distribution data in the plane at z=10 mm
以數(shù)值模擬的時延為真值,采用均方根誤差公式,計算圖11 中實(shí)測時延擬合曲線和數(shù)值模擬曲線之間的誤差。由于數(shù)值模擬中所代入的流場分布是理想Rankine渦流速,在最大流速兩側(cè)與實(shí)際流場分布有一定差距,因此只計算最大流速中間對應(yīng)的時延曲線誤差,計算結(jié)果如表4 所示。由表4可知,數(shù)值模擬計算的時延與實(shí)驗測量值基本吻合,誤差均小于10%,說明本文提出數(shù)值模擬方法的有效性。
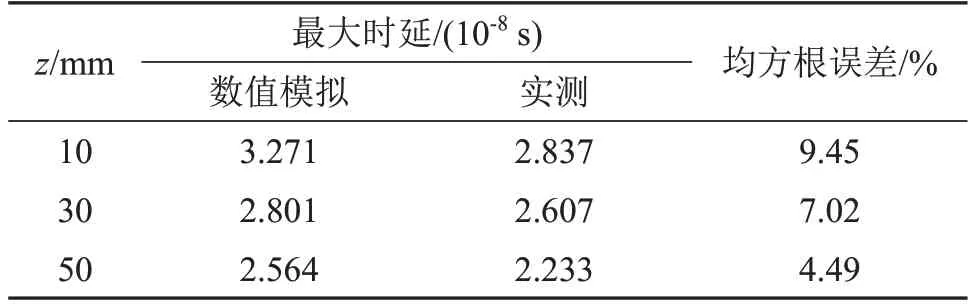
表4 時延數(shù)據(jù)與誤差分析Table 4 Time delay data and error analysis
4 誤差分析
本實(shí)驗主要針對聲時延量進(jìn)行測量,該時延量為小量,為了進(jìn)一步分析實(shí)驗結(jié)果的可信性,下面針對影響時延測量的誤差因素進(jìn)行討論。
4.1 傳感器指向性
實(shí)驗中所使用的超聲傳感器具有指向性,主瓣-3 dB處的開角Φ為4°±1°,可通過改變發(fā)射端與接收端軸向偏移量研究指向性對時延測量的影響。
在整渦管出口下方z=10 mm 平面按照圖13 所示進(jìn)行傳感器的布置,測點(diǎn)a處發(fā)射端與接收端中軸嚴(yán)格對齊,隨后依次偏移5 mm 的測點(diǎn)設(shè)為b~e測點(diǎn),在各測點(diǎn)處測量有渦和無渦條件下的聲信號。由于超聲傳感器指向性的影響,不同測點(diǎn)處的聲信號幅值發(fā)生改變。改變接收信噪比(Signal to Noise Ratio,SNR),每個測點(diǎn)的信噪比測量結(jié)果如表5所示。

表5 不同測點(diǎn)的信噪比測量結(jié)果Table 5 Measurement results of SNR at different positions

圖13 傳感器布放位置示意圖Fig.13 Schematic diagram of the sensor placement
信噪比的改變將直接影響時延估計的精度。根據(jù)本文實(shí)驗條件,計算互相關(guān)時延估計算法在不同信噪比條件下的時延誤差如圖14所示。由圖14可知,當(dāng)信噪比大于10 dB時,時延估計誤差均小于5%。由表5可知,實(shí)驗時發(fā)射端與接收端中軸偏移量小于10 mm就可以保證10 dB以上的信噪比。本實(shí)驗中兩個超聲傳感器被剛性固定在同一移動滑臺上,中軸偏移量遠(yuǎn)小于10 mm,信噪比較高,因此超聲傳感器指向性對實(shí)驗結(jié)果影響較小。
4.2 整渦管
在z=10 mm平面上,整渦管的存在可能會對聲波產(chǎn)生反射、透射和衍射等產(chǎn)生影響。整渦管出口干擾示意圖如圖15 所示。由于本實(shí)驗所使用的傳感器發(fā)射和接收均具有較窄的指向性,則整渦管的存在對聲信號所產(chǎn)生的影響較小,下面通過實(shí)測數(shù)據(jù)分析整渦管對本實(shí)驗聲傳播的影響。
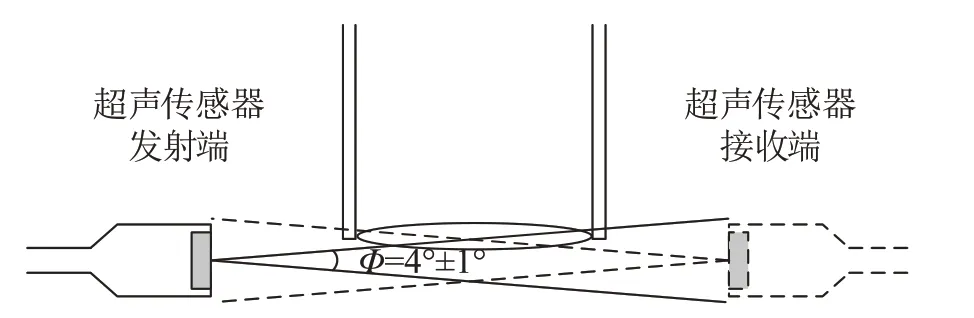
圖15 整渦管出口干擾示意圖Fig.15 Schematic diagram of vortex tube outlet interference
在無渦條件下,在z=10 mm平面處,對存在整渦管和無整渦管兩種情況,分別測量聲波從發(fā)射端到接收端的傳播時間。兩種情況下傳播時間相對誤差為2.27%,即整渦管對z=10 mm平面上的聲時延測量影響較小,其他平面離整渦管距離更遠(yuǎn),則影響將更小。
5 結(jié) 論
本文圍繞水下穩(wěn)態(tài)渦流場的聲傳播展開研究,給出了穩(wěn)態(tài)渦流場中的聲線傳播的微分方程,通過基于射線聲學(xué)的數(shù)值模擬方法計算聲波通過渦流場的時延,并與實(shí)驗測量結(jié)果進(jìn)行對比分析,得到如下結(jié)論:
(1) 基于射線聲學(xué)的數(shù)值模擬方法能有效計算聲波通過渦流場后的時延,數(shù)值模擬誤差小于10%。
(2) 通過現(xiàn)代CFD方法獲取水下穩(wěn)態(tài)渦流場的流速分布,較理想渦流場流速的理論公式更接近實(shí)際渦流場聲速的分布。
(3) 通過誤差分析可知,本實(shí)驗中由傳感器指向性和整渦管產(chǎn)生的誤差較小,驗證了本實(shí)驗測量結(jié)果的可靠性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21